
Abstract
A model has been proposed to estimate the average number of fragments produced by ductile fracture of a rapidly expanding ring with arbitrary cross-section. The model uses a minimum number of constants characterizing the material properties of the ring. We assume that material of the ring is incompressible with the density ρ and its mechanical behavior obeys the ideal rigid-plastic model with yield stress Y. It is shown that the average number of fragments weakly depends on the cross-sectional shape, if characteristic size of the cross-section does not change. The results obtained by the model are compared with the experiments of Grady and Benson (Exp Mech 23:393–400, 1983) where the aluminum and copper rings were tested. The comparison shows good agreement with the experiments with the copper rings over the entire range of strain rates realized in these experiments. For the aluminum rings, such agreement is observed only for high strain rates.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Dynamic fragmentation of solids caused by impact or explosion has been studied for years. Typical experimental situations in which these phenomena take place correspond to collisions in atomic physics [1], collision of macroscopic bodies [2] (including projectile impact on a massive target [3, 4]), shell fragmentation upon explosion and impact [5,6,7,8], and projectile fragmentation during high-velocity perforation of a thin shield [9, 10].
At the same time, with the development of numerical methods, such as the finite element method, discrete element methods and the smoothed particle hydrodynamics method, great success was achieved in numerical modeling of the fragmentation problems of solids and shells (see, for example, [4, 9,10,11]).
However, in modeling fragmentation, it is also of interest to construct simple analytical models that use the lowest possible information about the material of the fragmented solid or shell and their geometric parameters. Such models are useful both for engineering purposes and for experimental studies, since without special expenses they can in some cases evaluate the results of planned experiments.
The most known models of this kind are two one-dimensional fragmentation models of rapidly expanding metal cylinders. First is the statistics-based theory of Mott [6, 7] and second is the energy-based theory of Grady [7]. The models allow one to estimate both the average fragment length and the number of fragments. It is important to note that in work [7] these models are generalized to the case of the expanding rings in a trivial way due to their one-dimensionality.
In recent paper [8] we proposed a two-dimensional energy-based model of fragmentation of rapidly expanding cylinder in conditions of the ductile behavior of the material and under plane strain. The model allowed us to estimate the average fragment length and the number of fragments produced by ductile fracture of the cylinder. They obey the two-thirds power dependence on strain rate like the energy-based model of Grady. However, there is a significant difference between our model and Grady’s model. The difference consists in the presence of the cylinder-wall thickness into expressions for the average fragment length and the number of fragments. In present note we show that the proposed approach [8] can be used to estimate the number of fragments in a problem of fragmentation of an expanding ring with arbitrary cross-section.
2 Fragmentation model of a rapidly expanding ring
The model under consideration uses a minimum number of constants characterizing the material properties of the ring. We assume that material of the ring is incompressible with the density ρ and its mechanical behavior obeys the ideal rigid-plastic model with yield stress Y. We also assume that the linear dimensions of the cross-section of the ring are much smaller than the ring radius R. The ring undergoes a uniform radial expansion with a velocity Vr at the center of mass of the cross-section.
A key element of the problem is the model of the neck formation and evolution during rod stretching.
2.1 Model of necking
We consider a homogeneous rod, the cross-section of which is a convex contour having a center of symmetry (it coincides with the center of mass of the cross-section). The origin of a coordinate system (x;y) lies in the center of symmetry of the cross-section; the axis z is parallel to the axis of the rod.
Let \(\dot{\varepsilon }_{xx} , \ldots \dot{\varepsilon }_{yz} ,\;\sigma_{xx} , \ldots \sigma_{yz}\) are the components of the strain rate tensor and the stress tensor, respectively. The power of internal forces per unit volume is defined as \(w = \sigma_{ij} \dot{\varepsilon }_{ij}\). It is easy to show that for the accepted material properties it can be written in the form
A discontinuity of the tangential velocity equal to \(\left[ v \right]\) on some surface produces (according to (1)) the power of internal forces per unit surface which is equal to
Suppose that a continuous velocity field appeared in the rod in the form:
The velocity field between surfaces \(\psi_{2} (x;y) < z < \psi_{1} (x;y)\) is arbitrary and it satisfies the continuity condition on these surfaces. We denote by D a plane region in the section of the rod. Let us estimate the total power of internal forces \(W\) taking into account the incompressibility condition, \(\varepsilon_{xx} + \varepsilon_{yy} = - \varepsilon_{zz}\):
Thus, we have an estimate that gives the minimum possible power of internal forces in the problem under consideration: \(W_{\hbox{min} } = Y\left| {V_{1} - V_{2} } \right|2S\), where \(2S\) is the cross-sectional area of the rod. The solution of the model problem of neck formation when the rod is stretched under the conditions of plane deformation, as described in [8], gives for the total power of the internal forces
Note that the difference between (4) and the minimum possible power (3) is only ~ 15%.
Consider the rod in which the following velocity distribution is given at the initial instant:
We assume that a plane velocity field perpendicular to the x-axis analogous to the velocity field, which we considered in [8], is formed in the rod. This assumption, generally speaking, is valid if the rod cross-section is strongly elongated along the x-axis, i.e. aspect ratio a/h ≫ 1 (see Fig. 1). However, the distinction of the solution (4) (that is taken from [8]) from the minimum possible power (3) by only 15% tells us that we do not make a big mistake taking the plane velocity field for the case when aspect ratio a/h ~ 1.

The geometric meaning of the function \(s(y)\)
We introduce a function \(s(y)\) that has the meaning of the current area of the deformable part of the rod (neck), which is cut off from the cross-section of the rod by a straight line parallel to the x-axis (Fig. 1). It is assumed that \(0 < y < h\), where h is the ordinate of the furthest point of the right half of the rod section from the x-axis.
We believe that at the current moment the deformed zone has shifted by an amount y. Then the value of the power of internal forces \(N\) is
where for definiteness we put \(V_{1} > V_{2}\). From the law of momentum conservation it follows that
From the law of energy conservation it follows that
where \(E = \rho Sl_{1} V_{1}^{2} + \rho Sl_{2} V_{2}^{2}\) is the kinetic energy of the rod. From (8) it follows that
Initial conditions at \(t = 0:\;V_{1} = V_{10} ,\;V_{2} = V_{20} ,\;y = 0\). From (7, 9, 10) we obtain
with initial conditions at \(t = 0:\;y = 0,\;\frac{dy}{dt} = \frac{{V_{10} - V_{20} }}{2}\). Integrating (11) we obtain
A complete break of the rod occurs when \(y = h\). Consequently, the condition
must be satisfied for breaking the rod.
Let the moment \(t = \tau\) correspond to the moment of discontinuity. Integrating power (6) with respect to time and taking into account relation (10) we obtain the work \(A_{f}\) necessary to break the rod:
We note that the integral \(\int\limits_{0}^{h} {s(y)dy} = Sy_{c}\) can be represented as \(S \cdot y_{c}\) where \(y_{c}\) is the coordinate of the center of mass of the right half of the rod section, and S is its area. It can be seen that the value of the integral depends on the selected direction of the x-axis. For example, let us consider a square with a side \(2a\). If the x-axis is parallel to the square side, then h = a and \(\int\limits_{0}^{h} {s(y)dy} = a^{3}\), if the x-axis is directed diagonally, then \(h = \sqrt 2 a\) and \(\int\limits_{0}^{h} {s(y)dy} = 2\sqrt 2 a^{3} /3\). The choice of the direction of the x-axis is determined from the condition of the minimum of the integral \(\int\limits_{0}^{h} {s(y)dy}\). It can be shown that the value of the integral \(2\sqrt 2 a^{3} /3\) is minimal for the case considered above when the rod has the square cross-section with the side 2a.
2.2 Fragmentation model
Let’s consider a uniform expansion of the ring with the velocity Vr at the center of mass of the cross-section selecting a fragment in the form of a segment of the ring with an angle 2β. When the ring is broken down into n identical fragments, \(\beta = \pi /n\). We assume that the linear dimensions of the ring cross-section are small in compared to its initial radius R and β ≪ 1. We also assume that the fracture at both ends of the segment occurs instantaneously and in the same way. Over time after the formation, the fragment will move as a rigid body with constant velocity. Using the laws of conservation of energy and momentum is easy to estimate the reduction of kinetic energy of the fragment \(\Delta E\) as a result of the velocity equalizing over the volume of the fragment:
In paper [8] it was shown that the potential energy of the fragment can be neglected compared to its kinetic energy. Therefore, the energy balance for the problem under consideration has the form of an equality between the decrease in the kinetic energy of the fragment (15) and the minimum work of formation of the breaking surface (14): \(\Delta E = (A_{f} )_{\hbox{min} }\). As a result, we obtain the desired expression for the average number of fragments:
where \(\dot{\varepsilon }_{\phi } = {{V_{r} } \mathord{\left/ {\vphantom {{V_{r} } R}} \right. \kern-0pt} R}\). Thus, the proposed model and the obtained formula (16) allow us to estimate the average number n and the average length of fragments \(s = 2\pi R/n\) that are formed upon rapid expansion of a ring of arbitrary cross-section.
We estimate the ratio
entering in (16) for two cases of the ring cross-sections:
-
(1)
Rectangle cross-section 2a × 2h where 2a and 2h are the height and thick of ring, respectively:
-
(a)
for a ≫ h one gets that Jm= h/2;
-
(b)
for a = h one gets that Jm= h\(\sqrt 2 /3\);
-
(c)
for a ≪ h one gets that Jm= a/2.
-
(a)
-
(2)
Circular cross-section of radius R: Jm=4R/(3π).
It is easy to see that in all cases \(J_{m} = k_{f} \cdot L\) where L is a linear size of the cross-section of the ring and \(k_{f}\) is the coefficient responsible for the cross-sectional shape. The coefficient \(k_{f}\) depends weakly on the shape of the cross section (it changes within 15% only). We also note that the case 1 (a), as expected, yields the formula (16) for the number of fragments, which coincides with that for the cylinder [8]:
For the case 1 (b) the formula (16) gives the number of fragments for the ring with the square cross section:
3 Comparison with experimental data
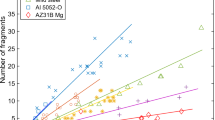
Let us compare the fragment number determined by the Eqs. (18) and (19) with that obtained in experiments by Myagkov et al. [12], Zhang and Ravi-Chandar [5], and Grady and Benson [13]. Type of the experiment, material used in the experiment, the experimental fragment number and the fragment number determined by (18) and (19) are shown in Table 1. We see that the estimates obtained are in close agreement with the experimental data (last two columns in Table 1). The comparison with the experiments of Grady and Benson is taken out from the table in Fig. 2.

The data from the experiments by Myagkov et al. [12] and Zhang and Ravi-Chandar [5] require comments. Modeling of the experiments with ejecta [12] supposes that an annular layer of material flowing from the crater is fractured due to the radial velocity component. The fragment number in these experiments is fixed by number of deep holes in the low-density collector that captures the ejecta flow. We have evaluated the number of fragments in the experiments on the fragmentation of cylinders [5] using the images provided in this paper (see Fig. 14 of the paper).
A comparison of the number of fragments obtained by formula (19) with the experiments of Grady and Benson [13] where the aluminum and copper rings were tested is shown in Fig. 2. One can see good agreement with the experiments with the copper rings over the entire range of strain rates obtained in the experiments. For the aluminum rings, such agreement is observed only for high strain rates. Comparison with Grady’s theory [7] is also presented in Fig. 2.
4 Conclusions
The model that allows us to estimate the average number of fragments and the average length of fragments produced by ductile fracture of a rapidly expanding ring with arbitrary cross-section is proposed in the present work. This model is a generalization of the approach developed by the authors in [8].
The result of the estimates, as can be seen from the final formula (16), depends on the value of the integral Jm (17). One can see that in all cases \(J_{m} = k_{f} \cdot L\) where L is a linear size of the cross-section of the ring and \(k_{f}\) is the coefficient responsible for the cross-sectional shape. The coefficient \(k_{f}\) depends weakly on the shape of the cross section (it changes within 15% only). It should also be noted that the case when the height of the ring significantly exceeds its thickness, as expected, yields formula (18) for the number of fragments, which coincides with the formula for the cylinder fragmentation [8].
Comparison of obtained results with published experimental data on the fragmentation of the aluminum and copper rings and cylinders shows that they are in good agreement. Comparison of the number of fragments obtained by formula (19) with the experiments of Grady and Benson [13] where the aluminum and copper rings were tested is shown in Fig. 2. One can see good agreement with the experiments with the copper rings over the entire range of strain rates obtained in the experiments. For the aluminum rings, such agreement is observed only for high strain rates.
References
Richert J, Wagner P (2001) Microscopic model approaches to fragmentation of nuclei and phase transitions in nuclear matter. Phys Rep 350:1–92
Hartmann WK (1969) Terrestrial, lunar, and interplanetary rock fragmentation. Icarus 10:201–213
Oddeshede L, Dimon P, Bohr J (1993) Self-organized criticality in fragmenting. Phys Rev Lett 71:3107
Timar G, Kun F, Carmona HA, Herrmann HJ (2012) Scaling law for impact fragmentation of spherical solids. Phys Rev E 86:016113
Zhang H, Ravi-Chandar K (2010) On the dynamics of localization and fragmentation—IV Expantion of AL 6061-0 tubes. Int J Fract 163:41–65
Mott NF (1947) Fragmentation of shell cases. Proc R Soc A189:300–308
Grady DE (2006) Fragmentation of rings and shells. Springer, Berlin
Goloveshkin VA, Myagkov NN (2014) Fragmentation model for expanding cylinder. Int J Fract 187:239–243
Gerasimov AV, Dobritsa DB, Pashkov SV et al (2016) Theoretical and experimental study of a method for the protection of spacecraft from high–speed particles. Cosmic Res 54:118. https://doi.org/10.1134/S0010952516020015
Myagkov NN, Shumikhin TA, Bezrukov LN (2010) Experimental and numerical study of peculiarities at high-velocity interaction between a projectile and discrete bumpers. Int J Impact Eng 37:980–994
Moxnes JF, Børve S (2005) Simulation of natural fragmentation of rings cut from warheads. Def Technol 11:319–329
Myagkov N, Bezrukov L, Shumikhin T (2009) Experimental investigation of ejecta generated by the hypervelocity impact of aluminum projectiles on continuous and mesh bumper. In: Proceeding of fifth European conference on space debris. ESOC, Darmstadt, Germany
Grady DE, Benson DA (1983) Fragmentation of metal rings by electromagnetic loading. Exp Mech 23:393–400
Acknowledgements
The work was carried out within the framework of the government task (Registration Number AAAA-A19-119012290136-7).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Goloveshkin, V.A., Myagkov, N.N. Fragmentation model of a rapidly expanding ring with arbitrary cross-section. Meccanica 54, 1219–1224 (2019). https://doi.org/10.1007/s11012-019-01017-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-019-01017-z