
Abstract
Rogue waves in the nonlocal \({\mathcal {PT}}\)-symmetric nonlinear Schrödinger (NLS) equation are studied by Darboux transformation. Three types of rogue waves are derived, and their explicit expressions in terms of Schur polynomials are presented. These rogue waves show a much wider variety than those in the local NLS equation. For instance, the polynomial degrees of their denominators can be not only \(n(n+1)\), but also \(n(n-1)+1\) and \(n^2\), where n is an arbitrary positive integer. Dynamics of these rogue waves is also examined. It is shown that these rogue waves can be bounded for all space and time or develop collapsing singularities, depending on their types as well as values of their free parameters. In addition, the solution dynamics exhibits rich patterns, most of which have no counterparts in the local NLS equation.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Rogue waves are spontaneous large waves that “appear from nowhere and disappear with no trace” [1]. These waves attracted a lot of attention in recent years due to their dramatic and often damaging effects, such as in the ocean and optical fibers [2, 3]. The first analytical expression of a rogue wave was derived for the nonlinear Schrödinger (NLS) equation by Peregrine [4]. Later, higher-order rogue waves in the NLS equation were derived, and their interesting dynamical patterns were revealed [5,6,7,8,9,10,11,12]. Since then, analytical rogue waves have been derived for a large number of other integrable systems, such as the derivative NLS equation [13, 14], the three-wave interaction equation [15], the Davey–Stewartson equations [16, 17], and many others [18,19,20,21,22,23,24,25,26,27,28,29,30]. Experimental observations of rogue waves have also been reported in optical fibers and water tanks [31,32,33,34,35].
Most of the rogue waves derived earlier were for local integrable equations, i.e., the solution’s evolution depends only on the local solution value and its local space and time derivatives. Recently, a nonlocal NLS equation
was proposed and studied [36,37,38,39,40]. Here, \(\sigma =\pm 1\) is the sign of nonlinearity (with the plus sign being the focusing case and minus sign the defocusing case), and the asterisk * represents complex conjugation. Notice that here, the solution’s evolution at location x depends on not only the local solution at x, but also the nonlocal solution at the distant position \(-\,x\). That is, solution states at distant locations x and \(-\,x\) are directly related, reminiscent of quantum entanglement between pairs of particles. Equation (1) was called \({\mathcal {PT}}\)-symmetric since it is invariant under the combined action of the \({\mathcal {PT}}\)operator, i.e., the joint transformation \(x\rightarrow -\,x\), \(t\rightarrow -t\) and complex conjugation [41]. Hence, if u(x, t) is a solution, so is \(u^*(-\,x,-t)\). The application of this \({\mathcal {PT}}\)-symmetric NLS equation for an unconventional system of magnetics was reported in [42]. Following this nonlocal \({\mathcal {PT}}\)-symmetric NLS equation, many other nonlocal integrable equations were quickly reported and investigated [43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60]. These nonlocal equations are distinctly different from local equations for their novel space and/or time coupling, which could induce new types of solution dynamics and inspire physical applications in nonconventional settings. A connection between nonlocal and local equations was discovered in [61], where it was shown that many nonlocal equations could be converted to local equations through transformations.
Rogue waves in nonlocal integrable equations are an interesting and largely unexplored subject. While rogue waves in the nonlocal Davey–Stewartson equations have been briefly investigated in [54, 55, 60, 61], these waves in the more fundamental nonlocal NLS equation (1) have received little attention. Since any x-symmetric solution of the local NLS equation would also satisfy the nonlocal NLS equation (1), x-symmetric rogue waves of the local NLS equation, such as the Peregrine wave [4], would also be rogue waves of the nonlocal equation (1). But whether the nonlocal NLS equation admits x-asymmetric rogue waves is the true open question.
In this article, we study rogue waves in the focusing nonlocal NLS equation (1) (with \(\sigma =1\)). We derive these waves by Darboux transformation and then obtain their explicit algebraic expressions through Schur polynomials. We find three types of rogue waves, which are x-asymmetric in general. The first type of solutions has polynomial degrees in their denominators as \(n(n+1)\), where n is an arbitrary positive integer. These polynomial degrees match those in the local NLS equation. However, our second and third types of rogue waves have polynomial degrees in their denominators as \(n(n-1)+1\) and \(n^2\), which have no counterparts in the local NLS equation. This means that the nonlocal NLS equation admits a much wider variety of rogue waves than its local counterpart. Dynamics of these rogue waves is also examined. We show that these rogue waves can be bounded for all space and time. But more importantly, they can also develop collapsing singularities. In addition, the solution dynamics exhibits rich patterns, most of which have no counterparts in the local NLS equation.
2 Rogue wave solutions
We consider rogue waves in the focusing nonlocal NLS equation (1) (with \(\sigma =1\)), which approach the same unit constant background when \(x, t\rightarrow \pm \infty \). In the local NLS equation, rogue waves in the form of rational solutions of x and t have been reported in [5,6,7,8,9,10,11,12], and the degree of the denominator in the n-th order rogue wave is \(n(n+1)\) [7, 11]. For the nonlocal NLS equation (1), we will show that, in addition to rogue waves with denominator degree \(n(n+1)\), there are also other types of rogue waves with denominator degrees \(n(n-1)+1\) and \(n^2\). Thus, the nonlocal NLS equation admits a wider variety of rogue waves than the local NLS equation.
Our results are summarized in the following theorems.
Theorem 1
The n-th order type-I rogue waves in the focusing nonlocal NLS equation (1) are given by the formula
where
and the superscript ‘T’ represents the matrix transpose. Here, functions \(\phi (\lambda )=(\phi _1, \phi _2)^\mathrm{T}\) and \(\psi (\zeta )=(\psi _1, \psi _2)\) are defined as
and \(s_{k}\) and \(r_{k}\ (k=0,1,\ldots ,n-1)\) are free real parameters.
Theorem 2
The n-th order type-II rogue waves in the focusing nonlocal NLS equation (1) are given by the formula
where
\(\psi _0=\left( 1, -1\right) \), and \(m^{(1)}_{i,j}\), \(\mu ^{(1)}\), \(\nu ^{(1)}\), \(\phi \) and \(\lambda \) are as given in Theorem 1.
Theorem 3
The n-th order type-III rogue waves in the focusing nonlocal NLS equation (1) are given by the formula
where
\(\omega (\zeta )=(\omega _1, \omega _2)\) is defined as
and \(\phi \), \(\mu ^{(1)}\), \(\zeta \), \(\lambda \), \(\zeta \), \(\widehat{A}\), \(\widehat{h}\) are as given in Theorem 1.
Rogue waves are rational solutions, and the \(\tau _0\) and \(\tau _1\) functions in the above theorems are polynomials of x and t. More explicit algebraic expressions for these functions can be provided through Schur polynomials \(S_n(\mathbf x )\), which are defined by
where \(\mathbf x =\left( x_{1}, x_{2},\ldots \right) \). Specifically,
Using Schur polynomials, we get the following more explicit expressions for these rogue waves.
Theorem 4
The matrix elements for rogue waves in Theorems 1–3 have the following explicit algebraic expressions,
where
\(\delta _{j,0}\) is the standard Kronecker delta notation (i.e., \(\delta _{0,0}=1\) and zero otherwise),
and parameters \(s_{k}\) and \(r_{k}\) are free real constants.
Theorem 5
All the three types of rogue waves in the above theorems satisfy the following boundary conditions,
In addition, the degrees of their denominator polynomials are
Remark 1
Type-I and type-III rogue waves have 2n real parameters, \(\{s_{k}, r_{k}, 0\le k\le n-1\}\). Type-II rogue waves have \(2n-1\) real parameters, \(\{s_{0}, s_{1},\ldots , s_{n-1}\}\) and \(\{r_{0}, r_{1},\ldots , r_{n-2}\}\). However, the parameter \(r_{n-2}\) (when \(n\ge 2\)) automatically vanishes from this solution. The reason is that \(r_{n-2}\) only appears in the last rows of the determinants \(\tau _0^{(2)}\) and \(\tau _1^{(2)}\). We can readily show that the derivatives of these last rows with respect to \(r_{n-2}\) are proportional to the first rows of those determinants; thus, the solution \(u_n^{(2)}(x,t)\) is actually independent of \(r_{n-2}\). This means that type-II rogue waves have only \(2n-2\) real parameters \(\{s_{0}, s_{1},\ldots , s_{n-1}\}\) and \(\{r_{0}, r_{1},\ldots , r_{n-3}\}\) when \(n\ge 2\) (they have one real parameter \(s_0\) when \(n=1\)). Utilizing time-translation invariance of the nonlocal NLS equation (1), one of those parameters can be further removed for each type of these solutions.
3 Derivation of rogue wave solutions
In this section, we derive the rogue wave solutions given in Sect. 2. This derivation is based on the generalized Darboux transformation (DT) first proposed in [62] and further developed in [10, 63]. The outline of our derivation is as follows.
We begin with the following ZS-AKNS scattering problem [64, 65]:
where
The compatibility condition of these equations is the zero-curvature equation
which yields the following coupled system for potential functions (u, v) in the matrix Q:
The focusing nonlocal NLS equation (1) is obtained from the above coupled system under the symmetry reduction [36]:
Under this reduction, the potential matrix Q satisfies the following symmetry condition:
where
To construct the Darboux transformation, we also introduce the adjoint spectral problem
3.1 N-fold Darboux transformation and its reduction
For the ZS-AKNS scattering problem (22), (23) with general potential functions u(x, t) and v(x, t), its Darboux transformation as given in [10, 39, 63] is
where \(\varPhi _{1}\) is a column-vector solution of the original Lax pair system (22), (23) with spectral parameter \(\lambda =\lambda _{1}\), and \(\varPsi _{1}\) is a row vector solution of the adjoint Lax pair system (33), (34) with spectral parameter \(\lambda =\zeta _{1}\). This Darboux transformation closely mimics the dressing matrix in the Riemann–Hilbert formulation of the inverse scattering transform for the focusing NLS equation [65, 66]. Under this Darboux transformation, if \(\varPhi (x, \lambda )\) satisfies the original ZS-AKNS scattering equations (22), (23), then the new function
would satisfy the same ZS-AKNS scattering problem, except that the potential matrix Q is transformed to
This relation between the old and new potentials is the Bäcklund transformation for the coupled evolution equations (28), (29).
The above Douboux transformation is for the general coupled system (28), (29). Now we consider the reduction in this DT for the nonlocal NLS equation (1). Due to the potential symmetry (31), it can be shown by direct calculations that the matrix U possesses the following symmetry
Using this symmetry and the zero-curvature equation (27), we can derive the corresponding symmetry of the matrix V by utilizing the fact that, for the given matrix U in (24), the matrix V which satisfies the zero-curvature equation (27) with the specific form of \(\lambda \)-dependence as in Eq. (25) is unique. This V symmetry is
Using these U and V symmetries, we can derive the symmetries of wave functions \(\varPhi \) and adjoint wave functions \(\varPsi \) and hence the symmetry of the Darboux transformation for the nonlocal NLS equation (1). Applying these symmetries to the spectral problems (22), (23), we get
and
Thus, if \(\varPhi (x)\) is a wave function of the linear system (22), (23) at \(\lambda \), then \(\sigma _{1}\varPhi ^*(-\,x)\) is a wave function of this same system at \(-\lambda ^*\). This symmetry has been reported in [37]. In the same way, we find that if \(\varPsi (x)\) is an adjoint wave function of the adjoint linear system (33), (34) at \(\lambda \), then \(\varPsi ^*(-\,x)\sigma _{1}\) is an adjoint wave function of the adjoint system at \(-\lambda ^*\).
From the above symmetries, we see that if \(\lambda _1\) and \(\zeta _1\) are purely imaginary, i.e., \(\lambda _1, \zeta _1 \in \text {i} \mathbb {R}\), then functions \(\sigma _{1}\varPhi _1^*(-\,x)\), \(\varPhi _1(x)\) would satisfy the same Lax pair equations (22), (23) at \(\lambda =\lambda _1\), and functions \(\varPsi _1^*(-\,x)\sigma _{1}\), \(\varPsi _1(x)\) would satisfy the same adjoint Lax pair equations (33), (34) at \(\lambda =\zeta _1\). In this case, if \(\sigma _{1}\varPhi _1^*(-\,x)\) and \(\varPhi _1(x)\) are linearly dependent on each other, and \(\varPsi _1^*(-\,x)\sigma _{1}\), \(\varPsi _1(x)\) are linearly dependent on each other, then the Darboux transformation (35) would preserve the potential reduction (30) and thus be a Darboux transformation for the nonlocal NLS equation (1). Specifically, we have the following result.
Proposition 1
If \(\lambda _{1}, \zeta _{1} \in \text {i}\mathbb {R}\),
where \(\alpha \) and \(\beta \) are complex constants, then the Darboux matrix (35) is a Darboux transformation for the focusing nonlocal NLS equation (1).
This proposition can be readily proved by checking that the new potential matrix \(Q_{[1]}\) from Eq. (37) satisfies the symmetry (30) under conditions (42).
Remark 2
Under conditions (42), it is easy to show that \(|\alpha |=|\beta |=1\).
Remark 3
A similar, but more restrictive proposition was presented in [39], where \(\alpha , \beta \) were required to be \(\pm 1\). Our proposition above gives a more general DT for \(\lambda _{1}, \zeta _{1} \in i\mathbb {R}\).
Remark 4
If \(\lambda _{1}, \zeta _{1} \notin i\mathbb {R}\), then another DT reduction exists for the focusing nonlocal NLS equation (1) [39]. However, this DT is irrelevant to our rogue wave calculations.
The N-fold Darboux transformation is a N times iteration of the elementary Darboux transformation. These N iterations of the elementary DT can be lumped together into a single N-fold Darboux matrix, which would yield a concise algebraic expression for the new solutions. For rogue wave calculations, the relevant N-fold Darboux matrix is given in the following proposition.
Proposition 2
The N-fold Darboux transformation matrix for the focusing nonlocal NLS equation (1) can be represented as
where
\(\lambda _{k}, \zeta _{k} \in i\mathbb {R}\), \(\varPhi _{k}\equiv \varPhi (x,t,\lambda _{k})\) solves the spectral equation (22), (23) at \(\lambda =\lambda _{k}\), \(\varPsi _{k}\equiv \varPsi (x,t,\zeta _{k})\) solves the adjoint spectral equation (33), (34) at \(\lambda =\zeta _{k}\),
and \(|\alpha _k|=|\beta _k|=1\). Moreover, the Bäcklund transformation between potential functions is:
where\(Y_1\)represents the first row of matrixY, and\(X_{2}\)represents the second column of matrixX.
This N-fold DT has been reported in [39], and the last expression in Eq. (44) can be found in [66]. The proof of this theorem can be given along the lines of [66, 67].
3.2 Derivation of rogue waves
To derive formulas for rogue waves, we first need the general eigenfunctions solved from the linear system (22), (23) and its adjoint system (33), (34). Choosing a plane wave solution \(u_{[0]}=\mathrm{e}^{-2 \text {i} t}\) to be the seed solution and introducing a diagonal matrix \(\mathcal {D}=\hbox {diag}\left( \mathrm{e}^{-\text {i}t}, \mathrm{e}^{\text {i}t}\right) \), we can derive a general wave function for the linear system (22), (23) as
where
and \(c_{1}\), \(c_{2}\), \(\theta \) are arbitrary complex constants. Imposing the conditions of \(\lambda \) being purely imaginary, \(|\lambda |>1\), \(\theta \) real, and
the above wave function would satisfy the symmetry condition (42). Through a simple Gauge (phase) transformation on the complex constant \(c_1\), we can normalize \(\alpha =1\).
Similarly, for the same seed solution \(u_{[0]}=\mathrm{e}^{-2\text {i} t}\), we can derive the adjoint wave functions to Eqs. (33), (34) satisfying the symmetry condition (42) as
where
\(\lambda \) is purely imaginary, \(|\lambda |>1\), \(\widehat{\theta }\) is real, and
Through a Gauge transformation on the complex constant \(\widehat{c}_1\), we can normalize \(\beta =1\). It is noted that this \(\varPsi (x,t)\) solution can also be derived directly from the above \(\varPhi (x,t)\) solution using the fact that, for the present x-independent seed solution \(u_{[0]}\), if \(\varPhi (x,t, \zeta )\) solves the original linear system (22), (23), then \(\varPsi (x,t, \lambda )=\varPhi ^\dagger (x,t, \zeta ^*)\) solves the adjoint system (33), (34).
Due to the free complex constants \(c_1\) and \(\widehat{c}_1\), we get two types of wave functions and adjoint wave functions. When \(c_1\) is taken as a real constant and denoting \(\lambda =ih\) with \(h>1\), then after a constant normalization, the wave function \(\phi (x,t)\) becomes
where \(\theta \) is a real constant. Here, the scaling constant \(1/\sqrt{h-1}\) is introduced so that this wave function does not approach zero in the limit of \(h\rightarrow 1\) (i.e., \(\lambda \rightarrow \text {i}\)). This scaling of the wave function clearly does not affect the solution in view of Proposition 2. Hereafter, we call this wave function type-a.
When \(c_1\) is taken as a purely imaginary constant, then after a constant normalization, the wave function \(\phi (x,t)\) becomes
where A is the same as that in (52). Hereafter, we call this wave function type-b.
If we take the limit of \(h\rightarrow 1^+\) in the above solution (53), we also get a special wave function
at the spectral parameter \(\lambda = \text {i}\). We call this wave function type-c.
Similarly, we get several types of adjoint wave functions. If \(\widehat{c}_1\) is taken as a real constant and denoting \(\lambda =-\text {i}\widehat{h}\) with \(\widehat{h}>1\), then after a constant normalization, the adjoint wave function (49) becomes
where \(\widehat{\theta }\) is a real constant. Since this adjoint wave function is the counterpart of type-a wave function, we call it of type-a as well. If \(\widehat{c}_1\) is taken as a purely imaginary constant, then after a constant normalization, the adjoint wave function (49) becomes
This adjoint wave function will be called type-b since it is the counterpart of the type-b wave function. In the limit of \(\widehat{h}\rightarrow 1^+\), this latter adjoint wave function reduces to
at the spectral parameter \(\lambda =-\,\text {i}\). It will be called type-c.
Rogue waves are rational solutions. To derive rogue waves from the above wave functions and adjoint wave functions using Proposition 2, we need to choose spectral parameters \(\lambda _{k}\) and \(\zeta _{k}\) so that the exponents A and \(\widehat{A}\) vanish themselves or vanish under certain limits. These exponents would vanish when \(\lambda =\pm \, \text {i}\). Thus, we can take \(\lambda _{k}\) to be i or approach i, and take \(\zeta _{k}\) to be \(-\,i\) or approach \(-\,\text {i}\). Since wave functions and adjoint wave functions in the Darboux transformation for the nonlocal NLS equation (1) are unrelated (see Proposition 2), and several different types of wave functions and adjoint wave functions exist, we have a lot of freedom in the construction of solutions. Choices of different types of wave functions and adjoint wave functions will lead to different types of rogue waves. This will be treated separately below.
1. We choose the wave functions to be all type-a with spectral parameters \(\lambda =\lambda _k\) and constant \(\theta =\theta _k\), where
and \(s_0, s_1, \dots , s_{n-1}\) are real constants. It is important that these real constants \(s_j\) are k-independent. In addition, we choose the adjoint wave functions to be also all type-a with spectral parameters \(\lambda =\zeta _k\) and constant \(\widehat{\theta }=\widehat{\theta }_k\), where
and \(r_0, r_1, \dots , r_{n-1}\) are k-independent real constants. Notice that the wave function \(\phi (x,t,\lambda )\) in (51) with \(\lambda =\text {i}(1+\epsilon ^2)\) and adjoint wave function \(\psi (x,t,\zeta )\) in (55) with \(\zeta =-\,\text {i}(1+\epsilon ^2)\) are both even functions of \(\epsilon \). Thus, we can expand
where
and
Applying these expansions to each matrix element in the Bäcklund transformation (44), performing simple determinant manipulations and taking the limits of \(\epsilon _{k}, \widetilde{\epsilon }_{k} \rightarrow 0\) (\(1\le k\le n\)), we derive the type-I rogue waves as given in Theorem 1.
2. We choose the wave functions to be all type-a as in the first case, but choose the adjoint wave functions to be a mixture of type-a and type-c. More specifically, we choose the first adjoint wave function \(\varPsi _1\) to be type-c and the other adjoint wave functions to be type-a, i.e., \(\varPsi _1=\psi _0 \mathcal {D}^{*}\) at spectral parameter \(\lambda =-\,\text {i}\), and \(\varPsi _k=\psi (x,t,\zeta _k)\mathcal {D}^{*} (2\le k\le n)\), where \(\psi (x,t,\zeta _k)\) is the type-a adjoint wave function (55) at spectral parameters \(\lambda =\zeta _k\) and constant \(\widehat{\theta }=\widehat{\theta }_k\) as in Eq. (59). Then, repeating the limit process as in the previous case, we derive the type-II rogue waves as given in Theorem 2.
3. We choose the wave functions to be all type-a as in the first two cases, but choose the adjoint wave functions to be all type-b, with spectral parameters \(\lambda =\zeta _k\) and constant \(\widehat{\theta }=\widehat{\theta }_k\) as in Eq. (59). Then, repeating the same limit processes as in the first two cases, we derive the type-III rogue waves as given in Theorem 3.
3.3 Algebraic expressions of rogue waves
In this subsection, we prove Theorem 4, which gives more explicit algebraic expressions for the rogue waves in Theorems 1–3.
The basic idea is to notice that, the matrix elements in Theorems 1–3, which are derivatives of certain functions in the small \(\epsilon \) and \(\widetilde{\epsilon }\) limits, are nothing, but the coefficients of power expansions of those functions in \(\epsilon \) and \(\widetilde{\epsilon }\). Thus, we need to derive these power expansions.
For this purpose, we first recall the following three expansions
where
The first two expansions are straightforward. Regarding the third expansion (66), notice that the function on its left side is odd in \(\epsilon \); hence, its expansion does not contain any even powers of \(\epsilon \). To prove this expansion, we notice that
because \(\text{ arcsin }(x)=-\,\text {i}\ln \left( \text{ i }x+\sqrt{1-\,x^2}\right) \). Then, using the Taylor expansion of \(\text{ arcsin }(x)\), the third expansion (66) can then be proved.
Next, we define
where \(A, h, \widehat{A}\) and \(\widehat{h}\) are as given in Theorem 1. These functions appeared in the exponents of the wave functions and adjoint wave functions in Theorems 1–3; thus, their power expansions are needed.
Using the expansions (64) and (66), we can calculate the expansion for \(\varTheta ^{+}(\epsilon )\) as
where \(\delta _{k,0}\) is the Kronecker delta notation. Thus,
where \(X_{2k+1}^{+}\) is as given in Theorem 4. Similarly, we obtain the expansion for \(\widetilde{\varTheta }^{+}(\widetilde{\epsilon })\) as
where \(\widetilde{X}^{+}_{2k+1}\) is as shown in Theorem 4.
Regarding \(\varTheta ^{-}(\epsilon )\) and \(\widetilde{\varTheta }^{-}(\widetilde{\epsilon })\), we notice that
From these relations, we get the expansions for \(\varTheta ^{-}\) and \(\widetilde{\varTheta }^{-}\) as
where \(X^{-}_{2k+1}\) and \(\widetilde{X}^{-}_{2k+1}\) are as defined in Theorem 4.
From these expansions, we see that \(\varTheta ^{\pm }(\epsilon )\) and \(\widetilde{\varTheta }^{\pm }(\widetilde{\epsilon })\) are odd functions. Thus,
Using these relations, functions \(-\,\varTheta ^{\pm }(\epsilon )\) and \(-\,\widetilde{\varTheta }^{\pm }(\widetilde{\epsilon })\) can be expanded as
Next, we also need to expand \(1/(\lambda -\zeta )\), where \(\lambda =\text {i}(1+\epsilon ^2)\) and \(\zeta =-\text {i}(1+ \widetilde{\epsilon }^{ 2})\). This expansion can be obtained as follows
where \(X_{2k}^{\pm }(\nu )\) and \(\widetilde{X}_{2k}^{\pm }(\nu )\) are as given in Theorem 4.
As in Theorem 4, we introduce vectors \(\mathbf X ^{\pm }\) and \(\widetilde{\mathbf{X }}^{\pm }\). Then, using Schur polynomials defined in Sect. 2, we have
Now, we are ready to derive all the matrix elements in Theorems 1–3 in terms of purely algebraic expressions. First, we consider type-I rogue wave solutions in Theorem 1. Its matrix elements \(m_{i,j}^{(1)}\) defined in (4) come from the \(\mathcal {O}(\epsilon ^{2i-2}\widetilde{\epsilon }^{2j-2})\) coefficients in the two-variable Taylor expansion of the function
where \(\phi =(\phi _1, \phi _2)^\mathrm{T}\) and \(\psi =(\psi _1, \psi _2)\) are given in Eqs. (8), (9) with \(\lambda =\text {i}(1+\epsilon ^2)\) and \(\zeta =-\,\text {i}(1+\widetilde{\epsilon }^2)\).
By using expansions (69)–(76), a direct calculation shows that
Inserting these two parts into (77), the coefficient \(m_{i,j}^{(1)}\) of the \(\mathcal {O}(\epsilon ^{2i-2} \widetilde{\epsilon }^{2j-2})\) term is then
which matches that given in Theorem 4.
To express \(\mu ^{(1)}\) and \(\nu ^{(1)}\) in matrix \(\tau ^{(1)}_{1}\), we also need the expansions of wave functions and adjoint wave functions. Derivation of these expansions is easier. Recall that
Then, using the earlier results and following similar calculations, we get
where \({{\varvec{Y}}}^{+}\), \(\widetilde{{{\varvec{Y}}}}^{-}\), \(\mu _j^{(1)}\) and \(\nu _{j}^{(1)}\) are as defined in Theorem 4.
For type-II rogue waves in Theorem 2, the only expression we need to derive is for \(m^{(2)}_{1,j}\). This is again an easier derivation, and we find that
where \({{\varvec{W}}}^{\pm }\) are as defined in Theorem 4.
At last, to derive explicit expressions for type-III rogue waves in Theorem 3, one only needs to make some modifications to the derivation for type-I rogue waves above. In this case,
where \(\omega (\zeta )\) is the adjoint wave function given in Theorem 3, and \(\phi (\lambda )\) is still the wave function given in Theorem 1. From direct calculations, we get
Combining these two parts, the coefficient \(m_{i,j}^{(3)}\) of the \(\mathcal {O}(\epsilon ^{2i-2} \widetilde{\epsilon }^{2j-2})\) term is then
which matches that in Theorem 4. Similarly,
Theorem 4 is then proved.
3.4 Boundary conditions
In this subsection, we prove Theorem 5, which gives the boundary conditions of these rogue waves as well as the degrees of their denominator polynomials.
From the definition in (19), we know that the Schur polynomial has the form \(S_{k}(\mathbf {x})=x_{1}^k/k!+(\text {lower degree terms})\). Thus, the degree of the polynomial \(S_{i-2\nu }(\widetilde{{{\varvec{X}}}}^{\pm })\) in (x, t) is \((i-2\nu )\), and its leading term is given by \(\pm (x+2\text {i}t)^{i-2\nu }/(i-2\nu )!\). In addition, the degree of the polynomial \(S_{j-2\nu }({{\varvec{X}}}^{\pm })\) is \((j-2\nu )\), and its leading term is given by \(\pm (x-2\text {i}t)^{j-2\nu }/(j-2\nu )!\). Thus,
but
Using these relations and performing similar calculations as in Ref. [11], we can show from Theorem 4 that
where \(c_0^{(1)}\), \(c_0^{(2)}\) and \(c_0^{(3)}\) are n-dependent constants. Thus, the polynomial degrees of \(\tau ^{(k)}_{0}\) in Theorem 5 are proved.
In addition, we find that when n is odd,
but when n is even, the polynomial degrees of \(\tau ^{(1)}_{1}\), \(\tau ^{(2)}_{1}\) and \(\tau ^{(3)}_{1}\) are lower than those of \(\tau ^{(1)}_{0}\), \(\tau ^{(2)}_{0}\) and \(\tau ^{(3)}_{0}\), respectively (in both x and t). Using these results, the boundary conditions of the three types of rogue waves given in Theorem 5 are proved.
4 Dynamics of rogue waves
In this section, we discuss dynamics of these rogue waves.
4.1 Dynamics of type-I rogue waves
The first-order type-I rogue wave is obtained by setting \(n=1\) in Eq. (2), where the matrix elements can be obtained from Theorem 4. In this case, we find that
where \(r_0\) and \(s_0\) are real constants. Thus, the first-order type-I rogue wave is
Denoting \(t_{0}\equiv (r_0-s_0)/4\) and \(x_0\equiv (r_0+s_0)/2\), this rogue wave can be rewritten as
This solution has one nonreducible real parameter \(x_0\), since the parameter \(t_0\) can be removed by time-translation invariance.
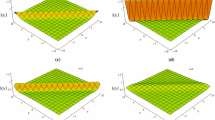
When \(x_{0}^2 < 1/4\), this rogue wave is nonsingular. If \(x_0=0\), it is the classical x-symmetric Peregrine solution of the local NLS equation, which is shown in Fig. 1a [note that any x-symmetric solution of the local NLS equation would satisfy the nonlocal equation (1)]. The peak amplitude of this Peregrine solution is 3, i.e., three times the level of the constant background. But if \(x_0\ne 0\), this solution would be x-asymmetric and would not satisfy the local NLS equation, and its peak amplitude would become higher. One of such solutions is shown in Fig. 1b.

Two nonsingular first-order type-I rogue waves (79). a\(s_0=0,\ r_0=0\) (corresponding to \(x_0=0\)); b\(s_0=1/2,\ r_0=-1/20\) (corresponding to \(x_0=0.225\)); c, d the corresponding density plots
When \(x_{0}^2\ge 1/4\), however, this rogue wave would collapse at \(x=0\) and two time values \(t_{c}=\pm \sqrt{(4x_{0}^2-1)/16}\). One such solution is displayed in Fig. 2. Note that wave collapse has been reported in bright solitons of the nonlocal NLS equation (1) before [36, 37]. Here we see that collapse occurs for rogue waves as well.

A collapsing first-order type-I rogue wave (79) with \(s_0=6,\ r_0=1\) (corresponding to \(x_0=3.5\)). a 3D plot; b density plot. Different color maps are used in these two plots for aesthetic reasons (color figure online)
Next, we consider second-order type-I rogue waves, which are given in Theorems 1 and 4 (with \(n=2\)). By tuning the free real parameters \(s_0, r_0, s_1\) and \(r_1\), we can get both nonsingular and singular (collapsing) solutions. Two nonsingular solutions are displayed in Fig. 3, where a single-peak pattern and a triangular pattern are observed. These patterns resemble those in the local NLS equation [5, 6, 8, 10,11,12], even though the present solutions are x-asymmetric and thus do not satisfy the local NLS equation.

Two nonsingular x-asymmetric second-order type-I rogue waves. a\(s_0=r_0=1/6,\ s_1=r_1=0\); b\(s_0=r_0=1/6, s_1=100, r_1=-100\). c, d the corresponding density plots
More interesting are the collapsing solutions, which show more complex patterns which have not been observed before. Six of them are displayed in Fig. 4. In panel (a), the solution contains two singular (collapsing) peaks on the vertical t axis, plus two “Peregrine-like” nonsingular peaks on the horizontal x axis. Panel (b) contains a quartet of singular peaks and one “Peregrine-like” nonsingular peak in the middle. The other four panels each contain six singular peaks, which are arranged in various circular and double-triangle patterns. Note that the maximum number of singular peaks in these solutions is six, which matches the polynomial degree of the denominator \(\tau _0^{(1)}\) given in Theorem 5 at this \(n=2\) value.

Six collapsing second-order type-I rogue waves. a\(s_0= r_0=2,\ s_1=r_1=50\); b\(s_0= r_0=3,\ s_1=r_1=-20\); c\(s_0=1/6, r_0=-1/6,\ s_1=r_1=100\); d\(s_0=r_0=6,\ s_{1}=20, \ r_{1}=-20\); e\(s_0=r_0=6,\ s_{1}=-20, \ r_{1}=20\); f\(s_0=r_0=6,\ s_{1}=-20, \ r_{1}=-20\)
Third-order type-I rogue waves would exhibit an even wider variety of solution patterns. Six of them are displayed in Fig. 5. The top row shows two nonsingular solutions, which contain six “Peregrine-like” peaks arranged in triangular and pentagon patterns, reminiscent of similar solutions in the local NLS equation [9,10,11,12]. The lower two rows show four collapsing solutions, with panel (c) containing two singular peaks and five “Peregrine-like” nonsingular peaks in between panel (d) containing ten singular peaks surrounding one “Peregrine-like” nonsingular peak, panel (e) containing twelve singular peaks in a pentagon–triangular mixed pattern, and panel (f) also containing twelve singular peaks, but in a more exotic pattern. Again, this maximum number of singular peaks twelve matches the polynomial degree of the denominator \(\tau _0^{(1)}\) at \(n=3\).

Six third-order type-I rogue waves (top row: nonsingular solutions; lower two rows: collapsing solutions). a\(s_0=1/6, r_0=1/4, s_1=30, r_1=-30, s_2=0, r_2=0\); b\(s_0=1/6, r_0=1/4, s_1=0, r_1=0, s_2=100, r_2=-100\); c\(s_0=r_0=0, s_1=0, r_1=0, s_2=r_2=240\); d\(s_0=r_0=10, s_1=80, r_1=0, s_2=0, r_2=-600\). e\(s_0=r_0=1, s_1=r_1=10, s_2=r_2=120\); f\(s_0=r_0=0, s_1=r_1=100, s_2=r_2=0\)
4.2 Dynamics of type-II rogue waves
Type-II rogue waves are given in Theorems 2 and 4. First, we consider the first order of such solutions, where \(n=1\). In this case, we get
thus,
Here \(s_0\) is a free real parameter, which can be removed by a shift of time. This rogue wave is shown in Fig. 6. It collapses once at \(x=0\) and \(\hat{t}=0\). In addition, it spatially decays to the constant background in proportion to 1 / x, which is slower than the classical Peregrine solution. A counterpart of this solution in the nonlocal Davey–Stewartson equations has been reported in [54, 55].

First-order type-II rogue wave (80), with parameter \(s_0=0\). a 3D plot; b density plot
Now we consider the second-order type-II rogue waves by setting \(n=2\) in Eq. (10). Using Theorem 4, we find that these solutions are given by
which can be rewritten as
where \(\hat{t}=t-s_0/2\), and \(\hat{s}_1=s_1-s_0\). This solution contains a single nonreducible real parameter \(\hat{s}_1\) after the parameter \(s_0\) is removed by time translation.
It is easy to show that this solution always collapses three times—one at \(x=0\), and the other two at locations symmetric in x. In addition, the latter two collapses occur at the same time. To illustrate, two such collapsing rogue waves are displayed in Fig. 7.

Two second-order type-II rogue waves (82). a\(s_0=30, s_{1}=0\); b\(s_0=-30, s_{1}=0\)
Third-order type-II rogue waves are obtained by setting \(n=3\) in Eq. (10), and they contain four free real parameters, \(s_0, s_1, s_2\) and \(r_0\). Six of such solutions are displayed in Fig. 8. These solutions always collapse, and this collapsing exhibits various patterns such as triangles and pentagons. The maximum number of collapsing points is 7 [as in panels (a, b, d, e)], which matches the polynomial degree of \(\tau _0^{(2)}\) for \(n=3\). But this number of collapsing points can be less than 7 [as in panels (c, f)]; in which case pairs of collapsing points are replaced by “Peregrine-like” nonsingular peaks.

Six third-order type-II rogue waves. a\(s_0=-20,\ s_1=s_2=0,\ r_0=30\); b\(s_0=20, s_1=s_2=0, r_0=-30\); c\(s_0=r_0=2\), \(s_{1}=0\), \(s_{2}=40\); d\(s_0=r_0=4\), \(s_{1}=0\), \(s_{2}=400\); e\(s_0=r_0=-4\), \(s_{1}=0\), \(s_{2}=-400\); f\(s_0=r_0=0\), \(s_{1}=0\), \(s_{2}=200\)
4.3 Dynamics of type-III rogue waves
Type-III rogue waves are obtained from Eq. (14). The first-order one, with \(n=1\), turns out to be the same as the first-order type-II rogue wave given in Eq. (80) and Fig. 6. The second-order one, with \(n=2\), has the polynomial degree of its denominator \(\tau _0^{(3)}\) to be 4. These rogue waves have four free real parameters \(s_0, r_0, s_1\) and \(r_1\). Three such solutions are shown in Fig. 9. The solutions in panels (a) and (b) contain four singular peaks arranged in novel patterns, while the one in panel (c) contains two singular peaks and one “Peregrine-like” nonsingular peak.

Three second-order type-III rogue waves. a\(s_0=0, s_{1}=60, r_{0}=r_{1}=0\); b\(s_0=2, s_{1}=-\,60, r_{0}=r_{1}=0\); c\(s_0=2, s_{1}=-\,40, r_0=2, r_{1}=0\)
5 Summary and discussion
In summary, we have derived three types of rogue waves for the focusing nonlocal NLS equation (1) by Darboux transformation and Schur polynomials. The first type of n-th order rogue waves has denominator degrees \(n(n+1)\) and can be bounded or collapsing depending on their 2n real parameters. The second and third types of n-th order rogue waves have denominator degrees \(n(n-1)+1\) and \(n^2\), respectively, and they appear to be collapsing for all their \(2n-2\) (\(n>1\)) and 2n real parameters. These rogue waves also exhibit rich solution patterns, encompassing not only those in the local NLS equation, but also many new ones. These results reveal that the nonlocal NLS equation admits a wider variety of rogue waves, which could be useful in physical systems where this nonlocal NLS equation arises.
We should point out that, by other choices of wave functions and adjoint wave functions in the Darboux transformation (see Sect. 3.2), we can get additional rogue wave solutions. But all additional solutions we obtained turn out to be equivalent to those three types reported in this article. For example, if we choose the wave functions to be all type-b, but choose the adjoint wave functions to be all type-a, then we would get rogue wave solutions \([u_n^{(3)}(-\,x,-t)]^*\), which are equivalent to the type-III rogue waves in Theorem 3 since the nonlocal NLS equation (1) is \({\mathcal {PT}}\)-invariant (see Introduction). For another example, if we choose the first wave function and adjoint wave function to be type-c, but the remaining wave functions and adjoint wave functions to be all type-a, then we would just get type-I rogue waves, but with a negative sign. Whether there exist additional types of rogue waves which are not equivalent to the three types derived in this paper is still an open question.
The rogue waves presented in this article correspond to the special initial conditions, which are special deformations of the constant background. In realistic situations, the initial condition is rarely one of those special deformations. Rather, it is often a random noise perturbation on the constant background. Then, can these rogue waves arise from a chaotic background? Will they stay bounded or collapse? What is the statistics of these rogue waves and their peak amplitudes under random initial conditions? For rogue waves in other physical systems, these questions have been investigated [3, 68, 69]. For the nonlocal NLS equation (1), these questions merit exploration as well. But they lie beyond the scope of the present article and will be left for future studies.
References
Akhmediev, N., Ankiewicz, A., Taki, M.: Waves that appear from nowhere and disappear without a trace. Phys. Lett. A 373, 675–678 (2009)
Kharif, C., Pelinovsky, E., Slunyaev, A.: Rogue Waves in the Ocean. Springer, Berlin (2009)
Solli, D.R., Ropers, C., Koonath, P., Jalali, B.: Optical rogue waves. Nature 450, 1054–1057 (2007)
Peregrine, D.H.: Water waves, nonlinear Schrodinger equations and their solutions. J. Aust. Math. Soc. B 25, 16–43 (1983)
Akhmediev, N., Ankiewicz, A., Soto-Crespo, J.M.: Rogue waves and rational solutions of the nonlinear Schrodinger equation. Phys. Rev. E 80, 026601 (2009)
Dubard, P., Gaillard, P., Klein, C., Matveev, V.B.: On multi-rogue wave solutions of the NLS equation and positon solutions of the KdV equation. Eur. Phys. J. Spec. Top. 185, 247–58 (2010)
Ankiewicz, A., Clarkson, P.A., Akhmediev, N.: Rogue waves, rational solutions, the patterns of their zeros and integral relations. J. Phys. A 43, 122002 (2010)
Dubard, P., Matveev, V.B.: Multi-rogue waves solutions to the focusing NLS equation and the KP-I equation. Nat. Hazards Earth Syst. Sci. 11, 667–72 (2011)
Kedziora, D.J., Ankiewicz, A., Akhmediev, N.: Circular rogue wave clusters. Phys. Rev. E 84, 056611 (2011)
Guo, B.L., Ling, L.M., Liu, Q.P.: Nonlinear Schrodinger equation: generalized Darboux transformation and rogue wave solutions. Phys. Rev. E 85, 026607 (2012)
Ohta, Y., Yang, J.: General high-order rogue waves and their dynamics in the nonlinear Schrodinger equation. Proc. R. Soc. Lond. A 468, 1716–1740 (2012)
Dubard, P., Matveev, V.B.: Multi-rogue waves solutions: from the NLS to the KP-I equation. Nonlinearity 26, R93–R125 (2013)
Xu, S., He, J., Wang, L.: The Darboux transformation of the derivative nonlinear Schrödinger equation. J. Phys. A 44, 305203 (2011)
Guo, B.L., Ling, L.M., Liu, Q.P.: High-order solutions and generalized Darboux transformations of derivative nonlinear Schrödinger equations. Stud. Appl. Math. 130, 317–344 (2013)
Baronio, F., Conforti, M., Degasperis, A., Lombardo, S.: Rogue waves emerging from the resonant interaction of three waves. Phys. Rev. Lett. 111, 114101 (2013)
Ohta, Y., Yang, J.: Rogue waves in the Davey–Stewartson I equation. Phys. Rev. E 86, 036604 (2012)
Ohta, Y., Yang, J.: Dynamics of rogue waves in the Davey–Stewartson II equation. J. Phys. A 46, 105202 (2013)
Ankiewicz, A., Akhmediev, N., Soto-Crespo, J.M.: Discrete rogue waves of the Ablowitz–Ladik and Hirota equations. Phys. Rev. E 82, 026602 (2010)
Ohta, Y., Yang, J.: General rogue waves in the focusing and defocusing Ablowitz–Ladik equations. J. Phys. A 47, 255201 (2014)
Ankiewicz, A., Soto-Crespo, J.M., Akhmediev, N.: Rogue waves and rational solutions of the Hirota equation. Phys. Rev. E 81, 046602 (2010)
Tao, Y.S., He, J.S.: Multisolitons, breathers, and rogue waves for the Hirota equation generated by the Darboux transformation. Phys. Rev. E 85, 026601 (2012)
Baronio, F., Degasperis, A., Conforti, M., Wabnitz, S.: Solutions of the vector nonlinear Schrödinger equations: evidence for deterministic rogue waves. Phys. Rev. Lett. 109, 044102 (2012)
Baronio, F., Conforti, M., Degasperis, A., Lombardo, S., Onorato, M., Wabnitz, S.: Vector rogue waves and baseband modulation instability in the defocusing regime. Phys. Rev. Lett. 113, 034101 (2014)
Priya, N.V., Senthilvelan, M., Lakshmanan, M.: Akhmediev breathers, Ma solitons, and general breathers from rogue waves: a case study in the Manakov system. Phys. Rev. E 88, 022918 (2013)
Mu, G., Qin, Z., Grimshaw, R.: Dynamics of rogue waves on a multi-soliton background in a vector nonlinear Schrödinger equation. SIAM J. Appl. Math. 75, 1–20 (2015)
Mu, G., Qin, Z.: Dynamic patterns of high-order rogue waves for Sasa–Satsuma equation. Nonlinear Anal. Real World Appl. 31, 179–209 (2016)
Ling, L.: The algebraic representation for high order solution of Sasa–Satsuma equation. Discrete Contin. Dyn. Syst. Ser. B 9, 1975–2010 (2016)
Ling, L.M., Feng, B.F., Zhu, Z.: Multi-soliton, multi-breather and higher order rogue wave solutions to the complex short pulse equation. Phys. D 327, 13–29 (2016)
Degasperis, A., Lombardo, S.: Rational solitons of wave resonant-interaction models. Phys. Rev. E 88, 052914 (2013)
Degasperis, A., Lombardo, S.: Integrability in action: solitons, instability and rogue waves. In: Onorato, M., Resitori, S., Baronio, F. (eds.) Rogue and Shock Waves in Nonlinear Dispersive Media, Lecture Notes in Physics, vol. 926, pp. 23–53. Springer, Cham (2016)
Kibler, B., Fatome, J., Finot, C., Millot, G., Dias, F., Genty, G., Akhmediev, N., Dudley, J.M.: The Peregrine soliton in nonlinear fibre optics. Nat. Phys. 6, 790–795 (2010)
Frisquet, B., Kibler, B., Morin, P., Baronio, F., Conforti, M., Millot, G., Wabnitz, S.: Optical dark rogue wave. Sci. Rep. 6, 20785 (2016)
Baronio, F., Frisquet, B., Chen, S., Millot, G., Wabnitz, S., Kibler, B.: Observation of a group of dark rogue waves in a telecommunication optical fiber. Phys. Rev. A 97, 013852 (2018)
Chabchoub, A., Hoffmann, N.P., Akhmediev, N.: Rogue wave observation in a water wave tank. Phys. Rev. Lett. 106, 204502 (2011)
Chabchoub, A., Hoffmann, N., Onorato, M., Slunyaev, A., Sergeeva, A., Pelinovsky, E., Akhmediev, N.: Observation of a hierarchy of up to fifth-order rogue waves in a water tank. Phys. Rev. E 86, 056601 (2012)
Ablowitz, M.J., Musslimani, Z.H.: Integrable nonlocal nonlinear Schrödinger equation. Phys. Rev. Lett. 110, 064105 (2013)
Ablowitz, M.J., Musslimani, Z.H.: Inverse scattering transform for the integrable nonlocal nonlinear Schrodinger equation. Nonlinearity 29, 915–946 (2016)
Wen, X.Y., Yan, Z., Yang, Y.: Dynamics of higher-order rational solitons for the nonlocal nonlinear Schrodinger equation with the self-induced parity-time-symmetric potential. Chaos 26, 063123 (2016)
Huang, X., Ling, L.M.: Soliton solutions for the nonlocal nonlinear Schrodinger equation. Eur. Phys. J. Plus 131, 148 (2016)
Gerdjikov, V.S., Saxena, A.: Complete integrability of nonlocal nonlinear Schrödinger equation. J. Math. Phys. 58, 013502 (2017)
Konotop, V.V., Yang, J., Zezyulin, D.A.: Nonlinear waves in \({\cal{PT}}\)-symmetric systems. Rev. Mod. Phys. 88, 035002 (2016)
Gadzhimuradov, T.A., Agalarov, A.M.: Towards a gauge-equivalent magnetic structure of the nonlocal nonlinear Schrödinger equation. Phys. Rev. A 93, 062124 (2016)
Ablowitz, M.J., Musslimani, Z.H.: Integrable discrete \({\cal{P}}{\cal{T}}\) symmetric model. Phys. Rev. E 90, 032912 (2014)
Yan, Z.: Integrable \({\cal{PT}}\)-symmetric local and nonlocal vector nonlinear Schroinger equations: a unified twoparameter model. Appl. Math. Lett. 47, 61–68 (2015)
Khara, A., Saxena, A.: Periodic and hyperbolic soliton solutions of a number of nonlocal nonlinear equations. J. Math. Phys. 56, 032104 (2015)
Song, C.Q., Xiao, D.M., Zhu, Z.N.: A general integrable nonlocal coupled nonlinear Schrödinger equation. arXiv:1505.05311 [nlin.SI] (2015)
Fokas, A.S.: Integrable multidimensional versions of the nonlocal nonlinear Schrödinger equation. Nonlinearity 29, 319–324 (2016)
Lou, S.Y.: Alice–Bob systems, \(P_s\)-\(T_d\)-\(C\) principles and multi-soliton solutions, arXiv:1603.03975 [nlin.SI] (2016)
Lou, S.Y., Huang, F.: Alice–Bob physics: coherent solutions of nonlocal KdV systems. Sci. Rep. 7, 869 (2017)
Ablowitz, M.J., Musslimani, Z.H.: Integrable nonlocal nonlinear equations. Stud. Appl. Math. 139, 7–59 (2017)
Xu, Z.X., Chow, K.W.: Breathers and rogue waves for a third order nonlocal partial differential equation by a bilinear transformation. Appl. Math. Lett. 56, 72–77 (2016)
Zhou, Z.X.: Darboux transformations and global solutions for a nonlocal derivative nonlinear Schrödinger equation. Commun. Nonlinear Sci. Numer. Simul. 62, 480 (2018)
Zhou, Z.X.: Darboux transformations and global explicit solutions for nonlocal Davey-Stewartson I equation. Stud. Appl. Math. 141, 186 (2018)
Rao, J.G., Zhang, Y.S., Fokas, A.S., He, J.S.: Rogue waves of the nonlocal Davey–Stewartson I equation. Nonlinearity 31, 4090 (2018)
Rao, J.G., Cheng, Y., He, J.S.: Rational and semi-rational solutions of the nonlocal Davey–Stewartson equations. Stud. Appl. Math. 139, 568–598 (2017)
Ji, J.L., Zhu, Z.N.: On a nonlocal modified Korteweg-de Vries equation: integrability, Darboux transformation and soliton solutions. Commun. Nonlinear Sci. Numer. Simul. 42, 699–708 (2017)
Ji, J.L., Zhu, Z.N.: Soliton solutions of an integrable nonlocal modified Korteweg-de Vries equation through inverse scattering transform. J. Math. Anal. Appl. 453, 973–984 (2017)
Ma, L.Y., Shen, S.F., Zhu, Z.N.: Soliton solution and gauge equivalence for an integrable nonlocal complex modified Korteweg-de Vries equation. J. Math. Phys. 58, 103501 (2017)
Ablowitz, M.J., Feng, B.F., Luo, X.D., Musslimani, Z.H.: Reverse space-time nonlocal sine-Gordon/sinh-Gordon equations with nonzero boundary conditions. Stud. Appl. Math. 141, 267 (2018)
Yang, B., Chen, Y.: Dynamics of rogue waves in the partially \({\cal{P}}{\cal{T}}\)-symmetric nonlocal Davey–Stewartson systems, arXiv:1710.07061 [math-ph] (2017)
Yang, B., Yang, J.: Transformations between nonlocal and local integrable equations. Stud. Appl. Math. 140, 178 (2018). https://doi.org/10.1111/sapm.12195
Salle, M.A., Matveev, V.B.: Darboux transformations and solitons. Springer, Berlin (1991)
Cieslinski, J.L.: Algebraic construction of the Darboux matrix revisited. J. Phys. A 42, 404003 (2009)
Ablowitz, M.J., Segur, H.: Solitons and Inverse Scattering Transform. SIAM, Philadelphia (1981)
Novikov, S., Manakov, S.V., Pitaevskii, L.P., Zakharov, V.E.: Theory of Solitons. Plenum, New York (1984)
Yang, J.: Nonlinear Waves in Integrable and Non integrable Systems. SIAM, Philadelphia (2010)
Bian, D., Guo, B.L., Ling, L.M.: High-order soliton solution of Landau–Lifshitz equation. Stud. Appl. Math. 134, 181–214 (2015)
Benetazzo, A., Ardhuin, F., Bergamasco, F., Cavaleri, L., Guimaraes, P.V., Schwendeman, M., Sclavo, M., Thomson, J., Torsello, A.: On the shape and likelihood of oceanic rogue waves. Sci. Rep. 7, 8276 (2017)
Mancic, A., Baronio, F., Hadzievski, L.J., Wabnitz, S., Maluckov, A.: Statistics of vector Manakov rogue waves. Phys. Rev. E 98, 012209 (2018)
Acknowledgements
This material is based upon work supported by the Air Force Office of Scientific Research under award number FA9550-12-1-0244 and the National Science Foundation under award number DMS-1616122. The work of B.Y. is supported by a visiting-student scholarship from the Chinese Scholarship Council.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Yang, B., Yang, J. Rogue waves in the nonlocal \({\mathcal {PT}}\)-symmetric nonlinear Schrödinger equation. Lett Math Phys 109, 945–973 (2019). https://doi.org/10.1007/s11005-018-1133-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11005-018-1133-5