
Abstract
Context
Animal population dynamics are shaped by their movement decisions in response to spatial and temporal resource availability across landscapes. The sporadic availability and diversity of resources can create highly dynamic systems. This is especially true in agro-ecological landscapes where the dynamic interplay of insect movement and heterogeneous landscapes hampers prediction of their spatio-temporal dynamics and population size.
Objectives
We therefore systematically looked at population-level consequences of different movement strategies in temporally-dynamic resource landscapes for an insect species whose movement strategy is slightly understood: the Queensland Fruit Fly (Bactrocera tryoni)
Methods
We developed a spatially-explicit model to predict changes in population dynamics and sizes in response to varying resources across a landscape. We simulated the temporal dynamics of fruit trees as the main resource using empirical fruiting dates. Movement strategies were derived from general principles and varied in directedness of movement and movement trigger.
Results
We showed that temporal continuity in resource availability was the main contributing factor for large and persistent populations. This explicitly included presence of continuous low-density resources such as fruit trees in urban areas. Analysing trapping data from SE Australia supported this finding. We also found strong effects of movement strategies, with directed movement supporting higher population densities.
Conclusions
These results give insight into structuring processes of spatial population dynamics of Queensland Fruit Fly in realistic and complex food production landscapes, but can also be extended to other systems. Such mechanistic understanding will help to improve forecasting of spatio-temporal hotspots and bottlenecks and will, in the end, enable more targeted population management.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
One of the biggest challenges in managing species populations for suppression or conservation is knowing “where are they when?” The spatio-temporal dynamics and spatial patterns of populations are the combined result of a dynamic resource landscape, as well as species intrinsic population dynamics and movement strategies (Mueller et al. 2011; Teitelbaum et al. 2015). The underlying drivers and mechanisms have been studied under the unifying concept of movement ecology (Getz and Saltz 2008; Nathan et al. 2008; Revilla and Wiegand 2008). This framework suggests that the underlying mechanisms for animal movement (such as animals searching for food, shelter or mates) are universal across taxa. Studying these in small animals, such as pest insects, however, proves to be difficult simply because of technical limitations due to size (Schellhorn et al. 2014).
Additionally, the majority of movement ecological studies consider landscape structure as a static distribution of habitats either distinguishing patches and matrix (as summarized in Fahrig 2003) or comparing habitats of different quality (Fahrig et al. 2011). However, especially in agricultural systems, landscapes also encompass resources of different temporal availability creating a highly dynamic resource space (Thierry et al. 2017). The influence of the temporal availability of resources and especially of resource continuity on the population dynamics of a species within a landscape has recently been emphasized with respect to the persistence of populations of beneficial insects (Schellhorn et al. 2015; Fernández et al. 2016). This is also of interest when, for example, assessing the susceptibility of agricultural landscapes towards the establishment of pest insects. To forecast their populations in complex heterogeneous environments, a mechanistic understanding of how these processes shape population dynamics is needed (Zalucki et al. 2016; Bastille-Rousseau et al. 2017).
Ecological modelling can assist in identifying important landscape features in the population dynamics of species (Parry et al. 2017; Grant et al. 2018) and can also be used to explore consequences of different movement strategies on population distributions (Mueller and Fagan 2008; Bourhis et al. 2017). In this study, using spatially-explicit simulations for the model pest Queensland fruit fly (QFly, Bactrocera tryoni Frogatt), we explore three main aspects that shape spatio-temporal population dynamics: (1) the dynamics and distribution of resources with differing quality across a landscape, (2) species intrinsic population dynamics in response to these resources, and (3) species movement strategies towards these resources.
The model builds on existing knowledge of QFly’s biology and combines it with general mechanistic foraging hypotheses and the complex structure of horticultural landscapes in South-East Australia. We use this system as an example to answer the following questions:
- 1.
What spatio-temporal aspects of a landscape, such as the amount, configuration and duration of resources, promote higher population densities of QFly in an agricultural landscape?
- 2.
How does the movement strategy of QFly influence its population dynamics and spatial distribution?
- 3.
How does a continuous low density resource supply (i.e. urban backyards) contribute to the persistence of the QFly population?
Findings of this study aim to shed light on the role of continuous resource availability and advance our understanding of landscape level movement of QFly. Furthermore, a better understanding of the general spatio-temporal dynamics and evidence on the role of urban areas will allow for more effective management, particularly using area-wide management approaches.
Methods
Study system
We study the case of Queensland Fruit Fly, a polyphagous and major insect pest of fruit and vegetables in east Australia. Apart from its economic impact, it is also an interesting case study for a species with a very broad range of potential hosts that differ in quality and seasonal availability (Hancock et al. 1999). Once QFly has access to these oviposition resources, populations can build up quite quickly because of a high oviposition rate (Fanson et al. 2009). QFly can also endure phases without hosts because of its extensive longevity of up to 120 days and sometimes more (O’loughlin et al. 1984; Harris 2009). The mode in which QFly forages for its resources in a landscape, however, is still unknown. There is some evidence that flies are probably not moving when resources are abundant (Balagawi et al. 2012), but other studies reported that QFly can potentially fly several kilometres (Dominiak 2012). This suggests that populations of QFly can be fast growing, highly dynamic in terms of spatial distribution, and responsive to landscape structure and dynamics. In addition, their ability to endure phases without hosts contributes to make them very persistent in a landscape: once they are established in an area, eradication is a big challenge.
Model overview
We developed a spatially-explicit model to explore multiple movement strategies of QFly across landscapes of varying spatio-temporal resources that consists of three components:
- 1.
A cell-based landscape model that allows a systematic exploration of different resource compositions,
- 2.
A stage-structured matrix model of QFly population dynamics that is simulated within each landscape cell,
- 3.
A movement model that incorporates four possible QFly movement strategies, based on what is known about their behaviour.
In the following, we describe the rationale and data that we used for the different parts of the model. For a detailed model description, please refer to the Online Appendix.
Landscape model
The landscapes consist of hexagonal cells with each cell representing a single commodity at a spatial resolution of 1 ha/cell. We chose hexagonal cells to simplify dispersal rules (see below). For each commodity, we obtained values for their quality as an oviposition resource (or host) for QFly and their seasonality. Resource quality (larval development success and fruit density) was informed by literature and expert opinion (Lloyd et al. 2013). The information on the seasonality of commodities was gathered via a survey among growers in south-eastern Australia.
We also included urban areas into our model. Cells with the “urban commodity” were modelled as an all year round host with only a low density of fruit (see Table 1, David Williams, NSW DPI, and Tony Filippi, pers. comm). The commodities shown in Table 1 were used to design landscapes that were used as an input into the model (see Table 2).
Population model
The dynamics of QFly populations in a single cell are calculated using a stage-structured approach with two stages: adults and juveniles. The juvenile stage integrates all immature stages (egg, larvae, pupae and teneral/infertile adult). (Mature) Adult flies are the reproducing and dispersing life stage.
The model simulates fruit fly populations within each landscape cell using a daily timestep. The number of adult flies N in a cell p at time t + 1 is defined as.
where A is the number of newly emerged adults, m is the daily adult mortality (see Table 3), hp is the hostility of cell p. These growth and mortality terms are so-called intra-cell dynamics (Hanski 1998; Leibold et al. 2004), because they are calculated for the population in each cell. Two ‘inter-cell’ parameters, E and I, represent the emigration out of and the immigration into the cell, respectively. These inter-cell parameters are calculated between neighbouring cells at each timestep (see Movement Model section below and in the Online Appendix).
Movement model
The other important component of spatially-explicit simulation models is the movement of individuals from one location (or cell) to another. Movement data in QFly is almost solely restricted to so-called release-recapture experiments, where a given number of flies is marked and then released at a given point. Afterwards flies are trapped in the surrounding landscape often with extremely low recapture rates (Dominiak 2012). These kind of studies therefore can give an estimate on the distribution of dispersal distances from an origin over time. However, these studies do not give mechanistic insight into movement strategies (but see Balagawi et al. 2012) and ignore effects of the resource landscape on the movement behaviour.
A mechanistic way of looking at species movements suggests to split the process into emigration (moving away from where they are now), actual movement (moving across a landscape towards a new location) and immigration (arriving at a new location) and study the respective influencing factors separately (Bonte et al. 2012; Schellhorn et al. 2014). In our model, we focussed on the two processes emigration and movement. We tested two hypotheses for each of the processes (directed or undirected movement; constant or triggered emigration) and by using a full factorial combination, yielded four possible movement strategies.
The number of emigrating individuals is often considered as being influenced by local conditions, whereas the actual movement and the resulting immigration is regarded as a function of the neighbourhood. In general:
and
where dp gives the proportion of individuals emigrating and αqp is the fraction of individuals emigrating from cell q that arrives at cell p. The total immigration into cell p (Ip) is the sum over the immigrations from all neighbours (q).
We combine contrasting emigration and movement strategies into four scenarios, which differ in the way d and α are calculated: “constant emigration and random movement” (d is constant, α is the same for all neighbours), “constant emigration and directed movement” (d is a constant, α is dependent on resource availability of the surrounding cells), “triggered emigration and random movement” (d varies with resource availability, α is the same for all neighbours), and “triggered emigration and directed movement” (d varies with resource availability, α is dependent on resource availability of the surrounding cells). Please refer to the Online Appendix for a detailed description.
Modelling procedure and data analysis
We ran the model on 480 different landscapes (see Table 2) to look at the effect of the resource composition. We also studied the effect of movement by running the model with all four different movement strategies across the landscape gradients.
All simulations were carried out using C++ and the GNU scientific library (gsl, Gough 2009). The model operates on a daily timestep. Each simulation ran for the equivalent of 10 years (3600 days) to reach a steady state (same population values for consecutive years). All results shown are from the 11th year. Whenever the population density in a cell dropped below 10−8 (which corresponds to 1 fly per 100 km2), the population in this cell was considered extinct and the corresponding value was set to zero.
We conducted a full sensitivity analysis for the population model and the movement model under varying landscape scenarios. The examined parameter ranges can be found in Table 4 together with the default values used in the rest of this study. For results of the sensitivity analyses, please refer to the Sensitivity Analyses section in the Online Appendix.
We plotted all values for mean annual population densities as a boxplot (Fig. 7 in the Online Appendix). However, the amount of landscape variables (Table 2) in combination with the four movement strategies makes it difficult to compare values and analyse how each variable contributes to population densities. We therefore decided to plot the data in a different way (Fig. 3) where we looked at each variable’s states and whether one of these states is more likely to contribute to high or low population densities (above or below the median). To do this, we created two histograms for each input variable one for the lower (Fig. 3, left) and one for the higher (Fig. 3, right) values in population densities. We then also calculated the difference for each state of the input variable (points in Fig. 3) in the frequency distributions. This makes it robust towards different sample sizes, which allows a comparison to the empirical data presented in Fig. 4. Whenever a point is on the left side of the axis, this state of the variable is more likely to produce low population densities, when it is on the right side populations are generally higher under these conditions. We can then compare the different states of the variables and whether they are more likely to produce high or low population sizes. For a detailed example of this analysis, please refer to the respective section in the Online Appendix.
Trapping data
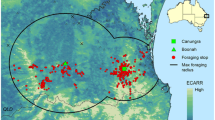
To assess model realism, we compared model outputs with data obtained from 1146 traps located in the Sunraysia region (a horticultural area along the Murray River in both Victoria and New South Wales). These traps are part of the area-wide fruit fly monitoring programme and are checked every week to every fortnight. For each trap, we acquired the landuse data of the landscape in a 500 m radius around the trap. We used the catchment-scale landuse maps from the Australian Collaborative Land Use Management Program (ACLUMP, Australian Bureau of Agricultural and Resource Economics and Sciences) and combined it with crop survey data from SunRISE Mapping and Research (Sunrise 21 2015) to get more detailed information on the crop-type (see Online Appendix on how this data was obtained and combined).
We analysed mean annual population densities in a landscape (measured as mean annual QFly densities observed in the traps) and looked at the effect of the amount of horticultural and urban area in a 500 m radius on the trap catches. We wanted to know if these show trends that are similar to the ones observed in the model. Following the analysis of the model data, we also split the empirical data at the median and looked at the frequency distributions of different levels of the respective landuse type in the upper and lower half of the population data. We also calculated the difference for each level to account for differences in sample sizes and computed Spearman’s Rho to estimate the strengths of the correlation. We tested for a temporal correlation of mean annual trap catches, using the same method, where a high correlation means that the same traps have similar values for both years. We also tested for a correlation between the landuse types in the landscapes. If there were only two landuse types in the data, we would expect a correlation of − 1.
We also carried out Kruskal–Wallis rank sum tests and Pairwise Wilcoxon rank sum tests on the mean annual trap catches in both years of data and for the two explanatory variables, respectively. The pairwise tests were only performed when Kruskal–Wallis rank sum tests were significant. p-values of Pairwise Wilcoxon rank sum tests were adjusted using the Holm–Bonferroni method.
Data availability
The datasets analysed during the current study may be made available from the corresponding author on reasonable request. However, note that restrictions apply to consultant landuse data and trapping data obtained from Australian State Government Departments, which were used under license for the current study.
Results
Modelled population dynamics of QFly followed a general pattern (see Fig. 1 for an example) that is sensitive towards the respective landscape structure and movement strategy (Fig. 1b). The highest population densities occurred at the end of summer (March–April) near the end of the Stonefruit and Grape season. When these were harvested, fly numbers started declining. Although citrus came into season in May this did not stop the decline, as the developmental success in citrus is low. The drop to the lowest numbers happened in November which, in this model, was just before the first new adults were emerging from the summer crops (Stonefruit and Grapes). When looking at the effect of movement strategies, we found that the date of the peak as well as the strength of population growth and decline varied with the different movement strategies. The increase in November, caused by the first new flies emerging, was stronger when movement was triggered by the availability of resources (movement strategies with a triggered emigration). The further increase during summer and autumn was similar between movement strategies except for the one with a triggered emigration and directed movement, which was probably experiencing a density dependent limitation. All fly densities in Fig. 1b are shown on a log scale to pronounce differences at lower population densities (please refer to Fig. 8 in the Online Appendix for a non-log visualization).

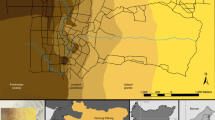
Example of one of the landscapes used in the model (a), the respective population dynamics (in flies per m2) under different movement scenarios (b) and the between patch variation in population densities expressed as Coefficient of Variation (c). Colours (red, green, orange, grey) represent the different commodities and their spatial location (a) as well as their respective fruiting times (b and c). Landscape in A: ID = 499, crop = “Mix”, cover = 60%, 10% urban, 30% pasture, aggregation score < 0.3
While numbers in Fig. 1b were averaged over the whole landscape, Fig. 1c shows the variability between cells (as coefficient of variation). This gives an indication of how flies were distributed in the landscape. During the growth phase in summer, the Coefficient of Variation (CV) between cells remained constant. This shows that, although growth was only happening in some cells, spill-over effects were large and created a more or less even distribution of flies across the landscape. When the high quality crops were harvested, trajectories for the different movement strategies began to diverge. For the movement strategy with a triggered emigration and random movement, the CV plummeted to very low values, indicating an almost homogenous distribution of flies. On the other extreme, in movement strategy with triggered emigration and directed movement the CV increased drastically which is a sign for a highly patchy fly distribution. The other two strategies showed intermediate values.
The general trend in spatial population dynamics can also be visualised with density maps at different times of the year (Fig. 2). These maps produced by the model can give an impression on how fly densities and distributions were linked with host availability. Figure 2 shows an example of this for the landscape presented in Fig. 1a under the different movement strategies. We chose to present four time steps that are representative of the different seasons. The upper row shows the fruit availability at the respective time step, whereas the other rows show the spatial distribution of fly densities at the same time for the four movement strategies. Comparing the spatial alignment between resources and fly density hot spots shows the interactive influence of resource availability and movement.

Resource availability (upper panel) and density maps of fly populations (lower panel) in the landscape shown in Fig. 1a at four time shapshots representing the different seasons. Different rows in the lower panel correspond to different movement strategies. Colour scale in the lower panel is scaled logarithmically
In summer (January), when host trees were typically abundant with susceptible fruit, we found that QFly populations grew in cells containing these hosts. With directed movement, we found a pattern of spatial alignment between resources and flies where fly populations appeared in cells where resources were growing, but neighbouring cells with no resources had no or few flies (Fig. 2). With undirected movement, we found somewhat higher populations in cells with available resource (due to local population growth) but other than that an almost even distribution across the landscape. Later in the year (April), hosts in some cells were already harvested and available fruit density was lower in the remaining host cells. However, fly densities were at their maximum which led to spill-over effects into the surrounding cells. This led to a more even distribution of flies even under directed movement. When simulating a movement with triggered emigration and directed movement, we found QFly populations starting to accumulate in urban cells. Spatial alignment between hosts and QFly populations remained weak throughout winter (July). However, populations with a simulated “directed movement” showed hotspots in urban areas and around remaining resources (i.e., Citrus). At the beginning of spring (1. October) with no hosts currently in season, we found populations shrinking and reducing to urban areas and surroundings under directed movement. In summary, spatial alignment of resources and flies was weak throughout the year when movement was undirected. When movement was directed, population distributions were patchier especially when resource abundance was low. Under triggered emigration and directed movement, spatial dynamics were strongest and matched best the changes in resource abundance, indicating that this was the most successful strategy for tracking resource changes.
Effect on mean annual population densities
The above mentioned results suggest a strong effect of both the underlying resource landscape and the movement strategy on the size of populations. We systematically explored this effect over a wide parameter space (Fig. 3).

Effect of movement strategies and landscape characteristics on population densities. Bars to the left show the distribution of different variable states in the lower half of resulting population densities. Bars to the right show those in the upper half, respectively. Points are calculated as the difference between left and right
Effect of movement
As suggested by the previously mentioned results, we found that the ability to track changes in the resource landscape is positively related with higher population densities. Movement strategies with a directed movement are therefore likely to lead to high population densities. In contrast, triggered emigration with undirected movement will almost always lead to low densities.
Effect of resource availability and distribution
In terms of resource effects, we found a weak negative effect of resource abundance (number of cells with horticultural commodities) but a strong effect of host type; with Stonefruit showing the most positive effect, monocultures of Grapes and Citrus seem to support only low annual fly densities. Mixed landscapes that offered a continuous supply of hosts showed a strong tendency towards high densities. When looking at the effect of urban areas in a landscape we found a strong positive correlation: the more urban area in a landscape the more likely the simulation will yield high fly numbers. Together, these results indicate the strong positive effect of a continuous resource supply on fly populations, even when it is only of low density (in the case of urban areas). We found only a weak effect of landscape level aggregation with highly aggregated landscapes showing a slightly more favourable condition. There was no effect of overall amount of resource in a landscape. However, when all other aspects of the landscape are the same, there was sometimes a weak positive effect on mean annual fly densities (see Fig. 7 in the Online Appendix).
Empirical data
We compared our modelling results for the generated landscapes to the trapping data by splitting the population data at the median and compared the landscape composition in the upper and the lower half of QFly population sizes (Fig. 4). Similar to our simulations, we found a weak negative effect of the amount of horticultural area on fly numbers. We also found that there is a strong positive relationship between the amount of urban area in a landscape and the likelihood of the corresponding trap catching a high number of flies. Figure 4 shows the mean flies per trap and day for 2015 and 2016.

Empirical data of 2015 (A) and 2016 (B) showing the effect of the amount of horticultural or urban area in the 500 m surrounding of a trap on the respective trap catches (mean annual flies/trap*day). Bars to the left show the distribution of different variable states in the lower half of measured population densities. Bars to the right show those in the upper half, respectively. Points are calculated as the difference between left and right
For a more quantitative analysis between the fly numbers and the characteristics of the surrounding landscape, we calculated Spearman’s rho to check for correlation. We found that the amount of urban area in a landscape showed a positive correlation with mean fly numbers (2015: ρ = 0.464 (p < 0.001), 2016: ρ = 0.328 (p < 0.001)), whereas the amount of horticultural area scaled negatively with trap catches (2015: ρ = − 0.359 (p < 0.001), 2016: ρ = − 0.06 (p = 0.045)). Mean numbers of flies caught per trap were also correlated between years [Pearson’s linear correlation coefficient was 0.313, Spearman’s ρ = 0.605 (p < 0.001)]. Finally, the amount of urban area was negatively correlated with the amount of agricultural area [ρ = − 0.357 (p < 0.001)) but it is very different from − 1, which means that landscapes with less agricultural area do not have more flies, simply because they have more urban area.
A Kruskal–Wallis rank sum test showed that the groups (0%, < 10%, < 30%, < 60% and > 60% in Fig. 4) of the two explanatory variables “amount of urban area” and “amount of horticultural area” were significantly different in terms of mean annual fly densities (with the exemption of “amount of horticulture” in 2016). Using a post hoc Pairwise Wilcoxon rank sum test with Holm–Bonferroni p value adjustments, we could show that the differences are significant between most of the groups (please see Table 5 for the exact results). This indicates that there is a strong correlation between the values of mean annual fly densities and the respective explanatory variable (positive for “amount of urban area” and negative for “amount of horticulture”).
Discussion
Landscape-scale population dynamics are influenced by processes at multiple spatial and temporal scales (Kromp and Steinberger 1992; Bowler and Benton 2005), ranging from the everyday foraging of individuals (Schellhorn et al. 2014) to seasonal landscape-level resource availability (Mueller and Fagan 2008). In this study, we focussed on Queensland Fruit Fly (Bactrocera tryoni) a polyphagous pest species of Australian horticulture, and its interaction with fruit trees as the resource for oviposition. Using a spatially explicit model, we showed that continuity, not abundance, of available oviposition sites is the main determining factor for large and persistent populations. This finding extends explicitly to continuous low level resources such as backyard trees in urban areas. We also showed that assuming a directed movement strategy for QFly leads to larger and more persistent populations, possibly overriding resource effects.
Continuity of the resource landscape leads to high and persistent populations
Our findings, that resource quality and continuity are more important than simple resource abundance, are in line with a recent review of empirical studies on pest population dynamics (Veres et al. 2013), which also found mixed results for pure resource abundance. Veres and colleagues suggest that resource abundance is not a good predictor of pest populations when a part of the pest’s life cycle occurs outside the crop. In our model, we find that the presence of another host (either another crop or urban areas) is necessary for population persistence (Online Appendix Fig. 7). This effect of a second limiting resource is overriding the abundance effect of the primary resource. Schellhorn et al. (2015) called this pattern a ‘spatio-temporal resource bottleneck’ that shapes population dynamics. In the same vein, our results suggest that this bottleneck appears outside the crop and determines landscape level pest-persistence. This stresses the importance of sequential resource use and the continuous low-level resource availability in urban areas for QFly populations.
If resources are continuously available, the model showed also an effect of resource quality (expressed in terms of fruit density and developmental success), with Stonefruit generally supporting the highest population densities, followed by Grapevines. This suggests that developmental success was actually more important than fruit density in determining resource quality, as this was higher in Stonefruit than in Grapevines (fruit density was higher in Grapevines).
Surprisingly, we found only a weak effect of landscape-level resource aggregation. This seems to be in contrast to previous modelling work or empirical studies that identify patch sizes and connectivity as important for persistent populations (Fahrig and Merriam 1985; Hanski 1998; Wilson et al. 2016). Although it is currently debated on whether existing measures of landscape configuration are appropriate (Fahrig and Triantis 2013; Hanski 2015), it seems that aggregation and connectivity are less important when habitat patches cover more than 20% of the landscape (Hanski 2015). Additionally, recent literature suggests that a decrease in habitat aggregation (e.g., due to habitat fragmentation) is not necessarily associated with lower population densities (Fahrig 2017). A recent modelling study, for example, looking at oviposition resource use in butterflies found the lowest landscape level fecundity when resources were aggregated (Zalucki et al. 2016). In their study, a resource spread out across a landscape was actually beneficial, which is due to the high mobility of the butterflies. The fact that we found only weak effects of aggregation is probably due to the size of the landscape and the range of the resource cover (resources were generally abundant, i.e. in a range from 40 to 100%; in contrast to Zalucki et al. (2016) which investigated levels as low as 1%).
Our model findings were also supported by the empirical data when analysed in a similar manner to the model output, as we also found no effect or even a negative effect of the amount of horticulture in a 500 m radius around a trap. We did find, however, that there is a strong positive relationship between the amount of urban area in a landscape and the likelihood of the corresponding trap catching a high number of flies. The temporal correlation between mean annual fly numbers suggests that these trends are quite consistent between years. All of this shows that urban areas can in fact contribute to the severity of a QFly problem by: (1) providing resources for QFly growth (backyard fruit trees) when production areas are not, (2) providing shelter and thus reducing mortality, and (3) by being so close to production areas that flies can move in and out within normal foraging distances. In addition to this, urban areas might become a problem when it comes to managing QFly populations. The amount of management strategies that are suitable for an urban setting are limited and the number of people that would need to get involved is significantly higher than would be in a pure production setting.
Directed movement leads to higher population densities
Interactions between the underlying resource landscape and animal movement has been recently reported in a review of movement modes and distances in vertebrates (Teitelbaum et al. 2015) with animals moving less when resources are plenty. A mechanistic model by Farnsworth and Beecham (1999) suggests that the interplay between resource abundance distribution and animal resource perception shapes the distribution of animals in a landscape. They show, that the most important mechanisms are how far animals can perceive and how they judge resource quality. Whether they then choose one resource or over another and how much these respective resources contribute to population growth can influence population sizes and ultimately lead to selection pressure (Pulliam and Danielson 1991). Consequently, Mueller and Fagan, (2008) suggest that, in the long term, certain resource landscapes would favour different movement strategies that optimise animal behaviour towards the amount and predictability of resources in these landscapes. However, such mechanistic movement models are lacking in current QFly literature, in turn impacting our ability to forecast and manage populations (Clarke et al. 2011).
We showed that a directed movement strategy led to tighter spatial alignment between QFly populations and resources. This in turn yielded higher population densities which is in line with other modelling studies looking at insect movements (such as Zalucki et al. 2016). In their model for Monarch butterflies (Danaus plexippus), increasing the virtual insect’s perception range and the directionality of movement led to a better detection of host plants and consequently increased landscape level egg-laying (Zalucki et al. 2016); the effect was stronger in landscapes where resources were scarce and fragmented. Similarly, in our simulations where we assumed directed movement, populations grew to high values and persisted even in landscapes with a relatively poor supply of resources. Mechanistically, this is due to the closer alignment between fly populations and resources (Fig. 2). In contrast, in our simulations with undirected movement, populations only persisted when resource continuity or quality was high (see Fig. 7 in the Online Appendix).
Higher and persistent fly populations also occur when a directed movement is triggered by local conditions; low resource density can result in an indirect positive density dependent movement as higher densities of flies reduce resources, and in turn increase emigration. Positive density dependent movement (direct and indirect) is found in a number of insect species (Dermo and Peterson 1995), but also in some birds and mammals (Matthysen 2005). In the same vein, a study on QFly found that movement is negatively correlated with resource availability (Balagawi et al. 2012). In theoretical studies, positive density dependent emigration (or density dependent dispersal) was shown to stabilize metapopulations in heterogeneous environments, creating so-called souce-sink dynamics (e.g., Amarasekare, 2004). However, if undirected (i.e., random), triggered movement leads to the most extinctions according to our results. This is because flies were equally distributed across the whole landscape, including empty cells without any potential for population growth. In contrast, directed movement results in flies locating even poor resources, where populations grow year-round and mortality rates are low. Once, the horticultural crop comes back into season, these populations can move back into the landscape and start a new population cycle (Thomas and Kunin 1999 call this kind of habitats “Sieves”).
Caveats
Given the theoretical scope of this study, there are some caveats that require mention here and that could potentially be addressed moving forward. First, in this study we looked at the three commodities that are most prominent in the horticultural areas in south-eastern Australia. We are confident that this captures the essential dynamics of the system. However, there are a lot more susceptible commercial crops. On top of that there can be some non-commercial host with an unknown resource quality. These can be incorporated into future realizations of the model if the relevant parameters (seasonality, quality and fruit density) can be estimated. Second, the information that we included on host quality and seasonality for the three commodities studied was qualitative data based on grower interviews. The fruit-availability data (host seasonality) probably included different varieties. As a consequence, the temporal resource availability might be shorter in reality. Again, this can be overcome by a more detailed parameterization. Third, most of the biological rates included in the population model are based on lab and field cage experiments or on expert opinion. There is no evidence on how these might change in the field. We can assess how things might change from the sensitivity analysis which, for example, showed that adult mortality has the most influence on the results (Online Appendix). Fourth, previous research suggests that there is a strong influence of temperature on the included parameters (especially the development time, Pritchard 1970, Merkel et al. 2019). We considered temperature to be constant (biological rates do not change over the year) as this allows us to focus on the key questions of this study relating to movement strategies and resource continuity in theoretical landscape scenarios. Increasing temperature will allow higher numbers of generations per year (Sutherst and Yonow 1998) and thereby potentially enable population spread and establishment (Sultana et al. 2017). Fifth, most of the aspects of the movement model are drawn from general assumptions that hold across various mobile insect species. We have no evidence for other hypotheses such as an active preference for specific hosts or a direct density dependence of emigration (positive or negative). An active preference for specific hosts would lead to an even more patchy distribution of flies (as would a negative density dependent emigration), a positive density dependent emigration (avoidance of conspecifics) would act as a trigger of movement independent of hosts status. This could change fly distributions to be more equal across the landscape. If future studies were able to report any of these, our model assumption on the general directedness and the timing of movement might alter. Sixth, we modelled movement only between neighboring cells. This assumes absence of long range resource perception beyond the next cell (in our model beyond 100 m). We also chose a hexagonal grid to have simple and consistent movement rules between neighboring cells. However, hexagonal grids are still rarely used in landscape ecological studies which one would have to bare in mind when comparing respective results directly (Birch et al. 2007).
Summary and implications
In this study, we found that temporal resource continuity was far more important for persistent populations than the amount of (a single) resource or the resource quality. A high resource quality (in terms of “developmental success”) led to higher maximum population sizes but having a second crop or a continuous low level resource supply (urban area) in the landscape had the strongest influence on persistence. We also showed that a directed movement strategy that is triggered by local conditions (resource availability) yielded the highest population densities.
This has implications for future research in at least two main areas: (1) the model clearly identified the movement strategy as one of two important components in QFly population stability. Field studies, that look into triggers, directedness and distances of movement can therefore greatly advance our understanding of a landscape level resource use and population dynamic; and (2) Urban areas have previously been shown to inhabit populations of QFly or the behaviourally similar Mediterranean Fruit Fly (Ceratitis capitata Weidemann) (Fletcher 1974; Economopoulos and Rempoulakis 2018) causing speculations about their role in pest dynamics. This study demonstrates the potential mechanisms in which urban areas can contribute to a QFly problem. Future management strategies should therefore be designed with regards to these findings.
Conclusions
The model and results presented in this study, are an example of mechanistically understanding and predicting landscape level population dynamics. Studies like these can bridge the gap to landscape ecological studies that often solely focus on landscape structure in space and lack temporal dynamics. Such thorough understanding of the spatial and temporal structure of population dynamics, and where and when they provide ecosystem services or disservices, is crucial for landscape level population assessments and for developing effective management strategies.
References
Amarasekare P (2004) The role of density-dependent dispersal in source–sink dynamics. J Theor Biol 226(2):159–168
Balagawi S, Jackson K, Hamacek EL, Clarke AR (2012) Spatial and temporal foraging patterns of Queensland fruit fly, Bactrocera tryoni (Froggatt) (Diptera: Tephritidae), for protein and implications for management: Qfly foraging for protein in the field. Aust J Entomol 51(4):279–288
Bastille-Rousseau G, Gibbs JP, Yackulic CB, Frair JL, Cabrera F, Rousseau L-P, Wikelski M, Kümmeth F, Blake S (2017) Animal movement in the absence of predation: environmental drivers of movement strategies in a partial migration system. Oikos 126(7):1004–1019
Birch CPD, Oom SP, Beecham JA (2007) Rectangular and hexagonal grids used for observation, experiment and simulation in ecology. Ecol Model 206(3–4):347–359
Bonte D, Van Dyck H, Bullock JM, Coulon A, Delgado M, Gibbs M, Lehouck V, et al. (2012) Costs of dispersal. Biol Rev 87:290–312
Bourhis Y, Poggi S, Mammeri Y, Le Cointe R, Cortesero A-M, Parisey N (2017) Foraging as the landscape grip for population dynamics: a mechanistic model applied to crop protection. Ecol Model 354(June):26–36
Bowler DE, Benton TG (2005) Causes and consequences of animal dispersal strategies: relating individual behaviour to spatial dynamics. Biol Rev Camb Philos Soc 80(2):205–225
Clarke AR, Powell KS, Weldon CW, Taylor PW (2011) The ecology of Bactrocera tryoni (Diptera: Tephritidae): what do we know to assist pest management? Ann Appl Biol 158(1):26–54
Dermo RF, Peterson MA (1995) Density-dependent dispersal and its consequences for population dynamics. In: Cappuccino N, Price PW (eds) Population dynamics. Academic Press, San Diego, pp 113–130
Dominiak BC (2012) Review of dispersal, survival, and establishment of Bactrocera tryoni (Diptera: Tephritidae) for quarantine purposes. Ann Entomol Soc Am 105(3):434–446
Economopoulos AP, Rempoulakis P (2018) Back-yard medfly is a key factor in area-wide management in Southern Europe. data from Attiki Greece, 38ο northern latitude. Entomol Hellenica 26(II):29–36
Fahrig L (2003) Effects of habitat fragmentation on biodiversity. Annu Rev Ecol Evol Syst 34:487–515
Fahrig L (2017) Ecological responses to habitat fragmentation per se. Annu Rev Ecol Evol Syst 48:1–23
Fahrig L, Baudry J, Brotons L, Brotons L, Burel FG, Crist TO, Fuller RJ, Sirami C, Siriwardena GM, Martin J-L (2011) Functional landscape heterogeneity and animal biodiversity in agricultural landscapes. Ecol Lett 14(2):101–112
Fahrig L, Merriam G (1985) Habitat patch connectivity and population survival. Ecology 66(6):1762–1768
Fahrig L, Triantis K (2013) Rethinking patch size and isolation effects: the habitat amount hypothesis. J Biogeogr 40(9):1649–1663
Fanson BG, Taylor PW (2012) Additive and interactive effects of nutrient classes on longevity, reproduction, and diet consumption in the queensland fruit fly (Bactrocera Tryoni). J Ins Physiol 58(3):327–334
Fanson BG, Weldon CW, Pérez-Staples D, Simpson SJ, Taylor PW (2009) Nutrients, not caloric restriction, extend lifespan in Queensland fruit flies (Bactrocera tryoni). Aging Cell 8(5):514–523
Farnsworth KD, Beecham JA (1999) How do grazers achieve their distribution? A continuum of models from random diffusion to the ideal free distribution using biased random walks. Am Nat 153(5):509–526
Fernández N, Román J, Delibes M (2016) Variability in primary productivity determines metapopulation dynamics. Proc R Soc B 283(1828):20152998
Fitt GP (1984) Oviposition behaviour of two tephritid fruit flies, Dacus Tryoni and Dacus Jarvisi, as influenced by the presence of larvae in the host fruit. Oecologia 62(1):37–46
Fletcher BS (1974) The ecology of a natural population of the queensland fruit fly, Dacus Tryoni. Vi. Seasonal changes in fruit fly numbers in the areas surrounding the orchard. Aust J Zool 22(3):353–363
Getz WM, Saltz D (2008) A framework for generating and analyzing movement paths on ecological landscapes. PNAS 105(49):19066–19071
Gough B (2009) GNU scientific library reference manual, 3rd edn. Network Theory Ltd, Massachusetts
Grant TJ, Parry HR, Zalucki MP, Bradbury SP (2018) Predicting monarch butterfly (Danaus plexippus) movement and egg-laying with a spatially-explicit agent-based model: The role of monarch perceptual range and spatial memory. Ecol Model 374(April):37–50
Hancock DL, Queensland, Department of Primary Industries (1999) The distribution and host plants of fruit flies (Diptera Tephritidae) in Australia. Dept. of Primary Industries, Brisbane
Hanski I (1998) Metapopulation dynamics. Nature 396(6706):41–49
Hanski I (2015) Habitat fragmentation and species richness. J Biogeogr 42(5):989–993
Harris A (2009) Can the Queensland fruit fly larval parasitoid Diachasmimorpha kraussii (Fullaway) (Hymenoptera: Braconidae) be reared on irradiated larval hosts? MSc Thesis, Imperial College London
Kromp B, Steinberger K-H (1992) Grassy field margins and arthropod diversity: a case study on ground beetles and spiders in eastern Austria (Coleoptera: Carabidae; Arachnida: Aranei, Opiliones). Agric Ecosyst Environ 40:71–93
Leibold MA, Holyoak M, Mouquet N, Amarasekare P, Chase JM, Hoopes MF, Holt RD, et al. (2004) The metacommunity concept: a framework for multi-scale community ecology. Ecol Lett 7(7):601–613
Lloyd AC, Hamacek EL, Smith D, Kopittke RA, Gu H (2013) Host susceptibility of citrus cultivars to queensland fruit fly (Diptera: Tephritidae). J Econ Entomol 106(2):883–890
Matthysen E (2005) Density-dependent dispersal in birds and mammals. Ecography 28(3):403–416
Merkel K, Florian S, Andrew DH, Nancy S, David W, Clarke AR (2019) Temperature effects on ‘Overwintering’ phenology of a polyphagous, tropical fruit fly (Tephritidae) at the subtropical/temperate interface. J Appl Entomol 143(7):754–765
Mueller T, Fagan WF (2008) Search and navigation in dynamic environments: from individual behaviors to population distributions. Oikos 117(5):654–664
Mueller T, Olson KA, Dressler G, Leimgruber P, Fuller TK, Nicolson C, Novaro AJ, et al. (2011) How landscape dynamics link individual- to population-level movement patterns: a multispecies comparison of ungulate relocation data. Glob Ecol Biogeogr 20(5):683–694
Nathan R, Getz WM, Revilla E, Holyoak M, Kadmon R, Saltz D, Smouse PE (2008) A movement ecology paradigm for unifying organismal movement research. PNAS 105(149):19052–19059
O’loughlin GT, East RA, Meats A (1984) Survival, development rates and generation times of the Queensland fruit fly, Dacus Tryoni, in a marginally favourable climate: experiments in Victoria. Aust J Zool 32(3):353–361
Parry HR, Paull CA, Zalucki MP, Ives AR, Hulthen A, Schellhorn NA (2017) Estimating the landscape distribution of eggs by Helicoverpa spp., with implications for Bt resistance management. Ecol Model 365(December):129–140
Pritchard G (1970) The ecology of a natural population of Queensland fruit fly, Dacus tryoni III. The maturation of female flies in relation to temperature. Aust J Zool 18(1):77
Pulliam HR, Danielson BJ (1991) Sources, sinks, and habitat selection: a landscape perspective on population dynamics. Am Nat 137(June):S50–S66
Revilla E, Wiegand T (2008) Individual movement behavior, matrix heterogeneity, and the dynamics of spatially structured populations. PNAS 105(49):19120–19125
Reynolds Ol, Orchard Ba (2011) Effect of adult chill treatments on recovery, longevity and flight ability of queensland fruitfFly, Bactrocera Tryoni (Froggatt) (Diptera: Tephritidae). Bull Entomol Res 101(01):63–71
Schellhorn NA, Bianchi FJJA, Hsu CL (2014) Movement of entomophagous arthropods in agricultural landscapes: links to pest suppression. Annu Rev Entomol 5(1)9:559–581.
Schellhorn NA, Gagic V, Bommarco R (2015) Time will tell: resource continuity bolsters ecosystem services. Trends Ecol Evol 30(9):524–530.
Sultana S, Baumgartner JB, Dominiak BC, Royer JE, Beaumont LJ (2017) Potential impacts of climate change on habitat suitability for the Queensland fruit fly. Sci Rep. https://doi.org/10.1038/s41598-017-13307-1
Sutherst RW, Yonow T (1998) The geographical distribution of the Queensland fruit fly, Bactrocera (Dacus) tryoni, in relation to climate. Aust J Agric Res 49(6):935–954
Teitelbaum CS, Fagan WF, Fleming CH, Dressler G, Calabrese JM, Leimgruber P, Mueller T (2015) How far to go? Determinants of migration distance in land mammals. Ecol Lett 18(6):545–552.
Thierry H, Vialatte A, Choisis J-P, Gaudou B, Parry H, Monteil C (2017) Simulating spatially-explicit crop dynamics of agricultural landscapes: the ATLAS simulator. Ecol Inform 40(July):62–80.
Thomas CD, Kunin WE (1999) The spatial structure of populations. J Anim Ecol 68(4):647–657.
Veres A, Petit S, Conord C, Lavigne C (2013) Does landscape composition affect pest abundance and their control by natural enemies? A review. Agric Ecosyst Environ 166(Supplement C)):110–117.
Wilson MC, Chen X-Y, Corlett RT, Didham RK, Ding P, Holt RD, Holyoak M, et al. (2016) Habitat fragmentation and biodiversity conservation: key findings and future challenges. Landscape Ecol 31(2):219–227
Zalucki MP, Parry HR, Zalucki JM (2016) Movement and egg laying in monarchs: to move or not to move, that is the equation. Austral Ecol 41(2):154–167
Acknowledgements
The authors would like to thank Tony Clarke for his help on parameterizing the model with regards to QFly’s biology, and Penny Measham and several fruit-growers for a general information on host seasonality and their feedback on the model. Special thanks to Javier Navarro Garcia, Andrew Hulthen, and Justine Murray for providing the landuse data and helping with the respective analyses. Thanks to Justine Murray, Matt Hill, Marc Bélisle and one anonymous reviewer for helpful comments on earlier drafts of this manuscript. The “Adaptive Area Wide Management of Qfly using SIT” project is being delivered by Hort Innovation in partnership with CSIRO, and is supported by funding from the Australian Government Department of Agriculture & Water Resources as part of its Rural R&D for Profit program. Further partners include QUT, Agriculture Victoria, NSW DPI, PIRSA, SARDI, Wine Australia and BioFly.
Author information
Authors and Affiliations
Contributions
FS, HP, and NS designed the study, FS did the modelling, analysed the results and wrote the first manuscript draft, all authors contributed significantly to subsequent versions of the manuscript. All authors have approved the final version of this article.
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Schwarzmueller, F., Schellhorn, N.A. & Parry, H. Resource landscapes and movement strategy shape Queensland Fruit Fly population dynamics. Landscape Ecol 34, 2807–2822 (2019). https://doi.org/10.1007/s10980-019-00910-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10980-019-00910-y