
Abstract
Context
Routine movements of large herbivores, often considered as ecosystem engineers, impact key ecological processes. Functional landscape connectivity for such species influences the spatial distribution of associated ecological services and disservices.
Objectives
We studied how spatio-temporal variation in the risk-resource trade-off, generated by fluctuations in human activities and environmental conditions, influences the routine movements of roe deer across a heterogeneous landscape, generating shifts in functional connectivity at daily and seasonal time scales.
Methods
We used GPS locations of 172 adult roe deer and step selection functions to infer landscape connectivity. In particular, we assessed the influence of six habitat features on fine scale movements across four biological seasons and three daily periods, based on variations in the risk-resource trade-off.
Results
The influence of habitat features on roe deer movements was strongly dependent on proximity to refuge habitat, i.e. woodlands. Roe deer confined their movements to safe habitats during daytime and during the hunting season, when human activity is high. However, they exploited exposed open habitats more freely during night-time. Consequently, we observed marked temporal shifts in landscape connectivity, which was highest at night in summer and lowest during daytime in autumn. In particular, the onset of the autumn hunting season induced an abrupt decrease in landscape connectivity.
Conclusions
Human disturbance had a strong impact on roe deer movements, generating pronounced spatio-temporal variation in landscape connectivity. However, high connectivity at night across all seasons implies that Europe’s most abundant and widespread large herbivore potentially plays a key role in transporting ticks, seeds and nutrients among habitats.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Functional connectivity is defined as the degree to which the landscape facilitates or impedes movement of a given target species (Taylor et al. 1993). Connectivity plays a crucial role in driving many ecological processes over a hierarchy of spatial scales (Bélisle 2005). Indeed, animal movement can be considered as the glue between fine-scale behaviours and landscape-level ecological processes (Lima and Zollner 1996; Jeltsch et al. 2013). Much work has focused on how landscape connectivity facilitates long distance movements such as dispersal, and therefore gene flow and metapopulation functioning, at large spatial scales (Coulon et al. 2004; Baguette and Van Dyck 2007). However, in heterogeneous landscapes, the fine-scale structure of the habitat matrix will also influence how animals move during their routine activities. For species with a key role in ecosystem functioning (e.g. ‘ecosystem engineers’ sensu Jones et al. 1997), small-scale functional connectivity will therefore have a crucial impact on how these ecological processes are distributed across the landscape (Earl and Zollner 2017).
Large wild herbivores are a prime example of ecosystem engineers (Jones et al. 1997), with marked impacts on a number of key ecological processes. For example, through browsing on woody vegetation, they alter plant composition (Gill and Beardall 2001), impede forest regeneration and impact vegetation productivity (Hobbs 1996). They also disseminate vectors, notably ticks that transmit pathogens which are responsible for several major vector-borne and zoonotic diseases in temperate areas (Mysterud et al. 2016; Vourc’h et al. 2016; Chastagner et al. 2017), nutrients (Seagle 2003) and seeds (Picard et al. 2015). Thus, the manner in which large herbivores move between habitat compartments during their daily feeding and rumination cycle has a direct impact on seed dispersal (Albert et al. 2015), nutrient transfer (Abbas et al. 2012) and vector dispersal (Ruiz-Fons and Gilbert 2010; Qviller et al. 2016). This is particularly the case in heterogeneous landscapes, as different biotopes may differentially affect vector survival and vegetation development. For example, by feeding in rich agricultural crops but defecating in nearby woodland patches during rumination, deer promote fertilization of the forest by transporting nitrogen and phosphorus from the former to the latter (Abbas et al. 2012). Furthermore, this effect is landscape-dependent, varying in intensity in relation to the proportion of forest in the local environment. Understanding the fine-scale dynamics of deer mobility is therefore essential in order to predict how landscape modification will impact these ecological processes.
Functional connectivity for a given species in a given landscape is not set in space and time, but rather likely fluctuates in response to the circadian and seasonal behavioural rhythms of the target species (Palmer et al. 2017). For example, the degree to which animals are prepared to accept risk varies in relation to their state or motivation (Nathan et al. 2008). Indeed, large herbivores, which are generally hunted or preyed upon, adjust their space use and movements to track spatio-temporal variation in the risk-resource trade-off (Fryxell et al. 2008; Van Beest et al. 2010; Martin et al. 2015). Notably, hunting is generally restricted in space (e.g. outside of protected areas) and time (during the open hunting season and during the day), creating a spatio-temporally dynamic landscape of risk (Bonnot et al. 2017). Despite the recent research focus on identifying corridors that facilitate movement across heterogeneous landscapes, particularly in a management context (Panzacchi et al. 2016), temporal variation in realized functional connectivity has rarely been considered (Zeller et al. 2012).
At fine spatial scales, an increase in human activities is generally associated with a high level of habitat modification and fragmentation, affecting both structural and functional connectivity (Ellis et al. 2010). Over the last half century, large wild herbivores have colonized the heterogeneous agricultural landscape over much of continental Europe (Linnell et al. 1998). In these multi-use human-dominated landscapes, large herbivores typically move frequently between high quality feeding areas in the agricultural matrix and remnant forest patches for rumination and refuge (Bjorneraas et al. 2011). As a consequence, alteration of either the spatial arrangement among suitable habitat patches or the spatial distribution of infrastructure (Trombulak and Frissell 2000) will modify functional connectivity for these species. In addition, prey may also perceive non-lethal human disturbance as a threat comparable to predation (Frid and Dill 2002), particularly when associated with hunting (Ciuti et al. 2012). Because human activity also has a circadian rhythm (e.g. increased road traffic, hikers, agricultural practices, etc. during the day), large herbivores adjust their movements and habitat use to this ‘landscape of fear’ (e.g. Brown et al. 1999; Laundré et al. 2010).
In this study, we quantified temporal variation in functional connectivity for roe deer (Capreolus capreolus), a key ecosystem engineer (Côté et al. 2004), which colonized the agricultural plain during the latter half of the last century, and is now the most widely distributed large herbivore across Europe (Linnell et al. 1998). We analyzed fine-scale movements of adults in a hunted population living in a multi-use landscape in the south of France. Our objective was to understand how spatial and temporal variation in the landscapes of risk and resources influenced the routine movements of roe deer and, hence, to determine how functional connectivity varies at the daily and seasonal time scales.
We first hypothesized (H1) that landscape connectivity for roe deer is influenced by the spatio-temporal variation in the risk-resource trade-off. In particular, the fluctuating level of human activity should drive variation in the degree of avoidance of riskier open habitats (such as crop fields or meadows) which generally provide higher quality resources (Hewison et al. 2009). We therefore predicted (P1a) that roe deer should move through, or remain close to, habitats providing concealing cover (woodland and hedgerows) more acutely during risky periods (i.e. during daytime and during the hunting season) compared to less risky periods (i.e. during night-time and during the off season). As a consequence, we predicted (P1b) that small scale landscape connectivity should be lower during autumn/winter compared to spring/summer because of the increased hunting disturbance and lower availability of cover and high quality resources in open habitats.
Second, while the relative influence of a given habitat on deer movement may vary from one season to another, and from daytime to night-time, at the landscape scale, we expected that (H2) a certain proportion of the study area, notably woodland habitat, should remain favourable for roe deer movements between consecutive seasons (for a given time of day). We thus predicted (P2a) that most of the zones that had high connectivity in autumn/winter (safe areas) should also provide high connectivity in spring/summer. If so, any increase in landscape connectivity from autumn/winter to spring/summer could take two forms: either an enlargement of existing favourable zones, or the appearance of novel favourable zones and/or corridors (see Online Resource Fig. S1 for a conceptual representation). As such temporal variation in local landscape connectivity likely has an important impact on the spatial distribution of animal-transported subsidies (Earl and Zollner 2017), we investigated this temporal dynamic, predicting that (P2b) any increase in the proportion of favourable areas from autumn/winter to spring/summer should involve progressive enlargement and inter-connection of existing favourable zones as deer should attempt to limit their risk exposure by minimising movement through unfavourable areas.
Materials and methods
Study area and species
The study site is a 19,000 ha rural area in the south of France (N43°17, E0°53). Agriculture is predominant, resulting in substantial modification of the landscape, including crop rotation and reduction and fragmentation of woodlands. Field crops cover 36.3% of the study area and woodland, covering 18.7% of the landscape, is fragmented in small patches, with the exception of two larger forests (672 and 463 ha; Fig. 1). The remainder of the study site consists essentially of meadows (31.4%), often bordered by a network of hedgerows. The main human infrastructures are an extensive and uniformly distributed road network (2.15 km/km2), but there are no major roads. The human population (19.5 inhabitants per 100 ha in 2011) is spread out across the study area and buildings are mainly small villages, farms and isolated houses.

Landscape structure of the study area presenting the major habitat features: woodland (dark gray), crop fields (medium gray), meadows (light gray) and roads (black lines)
During the main open hunting season in autumn/winter (mid-September–February), drive hunting with dogs, a highly disruptive type of hunting, is predominant. During summer (June–mid-September), only stalking of males for trophies is permitted which is less disruptive for roe deer (Benhaiem et al. 2008; Grignolio et al. 2011). There is no hunting between the beginning of March and the end of May.
Deer density was estimated using a capture-mark-resighting approach (Hewison et al. 2007) to average 9.3 deer per 100 ha in the multiple-use landscape, but to be 2–3 times higher in the two forest blocks.
Movement data
From 2002 to 2015, roe deer were caught during winter (from 16th November to 27th March) using drives of 30–100 beaters and 4 km of long-nets at one of 10 capture sites. Each roe deer was sexed and aged (juveniles < 1 year, adults > 18 months). A total of 172 adult deer (72 males and 100 females) were equipped with GPS collars (Lotek 3300) and released on site. In addition to a base-line monitoring schedule, to obtain a reliable estimate of an individual’s daily trajectory, the collars were programmed to obtain a GPS fix at high frequency (1 location/10 min) for a 24 h session approximately once per month (12 sessions on average, range = 1–30 per individual). We used these high resolution data to measure fine-scale mobility of roe deer. We performed differential correction to improve fix accuracy (Adrados et al. 2002). Following Bjorneraas et al. (2011), we eliminated potentially erroneous data points (< 0.001% of the total locations) when two consecutive steps formed spikes (Bjørneraas et al. 2010) by removing location i when the step lengths between i-1 and i, and i and i + 1 were > 500 m and the relative turning angle at location i was < ± 5° for all successive locations obtained every 10 min. In addition, because we were interested in how landscape structure influenced roe deer movements, we removed locations that were less than 10 m apart, when the deer was assumed to be resting, from the data set (Zeller et al. 2012). In habitat selection analyses, removing locations when the animal is presumed to be resting reduces the relative weighting associated with those habitats that are preferred for resting while maximizing the relative weighting associated with habitats that are preferentially used for other activities (Benhamou and Cornélis 2010). The threshold value of 10 m was fixed in relation to GPS error (50% of fix locations were within 14 m of the true position based on field assessments at fixed locations, Cargnelutti et al. 2007; see also Owen-Smith et al. 2010, 2012). With a threshold value of 20 m apart, we doubled the number of locations to remove (40% of total locations), meaning that we potentially removed movement locations.
To deal with gaps resulting from missing (or erroneous) data, we used speed (m/min) rather than distance per se between successive locations in the following analyses, which made it possible to include locations separated by more than 10 min.
Landscape descriptors
Based on previous studies on the same study site at coarser temporal scales (Coulon et al. 2008; Morellet et al. 2011; Bonnot et al. 2013), we expected fine-scale movements of roe deer to be influenced by proximity to refuge habitat (woodlands and hedgerows), disturbance from anthropogenic infrastructures (roads and buildings) and habitats providing high quality food resources (crop fields and meadows). We used a land cover map of these six habitat features with a 10 × 10 m resolution (for details on land cover map processing, see Morellet et al. 2011). For each pixel of the map, we calculated the Euclidean distance to the nearest element of each of these features, because movement within a given habitat may be influenced by proximity to a second habitat (Conner et al. 2003; Thurfjell et al. 2014). For example, a roe deer may use crop fields (high quality feeding) only when in close proximity to woodlands (for escape refuge; see Coulon et al. 2008). Moreover, habitat features with a low surface area (such as roads, buildings and hedgerows) may not be used per se, or detected as used (due to GPS error), although they might be of substantial importance for determining patterns of movement (Conner et al. 2003). Distances to landscape descriptors were estimated using PostgreSQL tools (PostgreSQL Global Development Group; https://www.postgresql.org/) and R package “RPostgreSQL” (Conway et al. 2017).
Data analyses
Modelling roe deer step selection
To assess the influence of habitat features on roe deer movements, we used step selection functions which use conditional logistic regressions (SSF; Fortin et al. 2005; Coulon et al. 2008; Panzacchi et al. 2016). In brief, SSF are based on the comparison of the habitat characteristics of a given observed step between 2 locations (coded 1) with those of a sample of random steps (coded 0). An SSF takes the form:
where β i are the maximum likelihood coefficients for each landscape descriptor x i (distance to a given habitat feature) estimated from the conditional logistic regression. For each step, a score (ŵ(x)) is estimated such that steps with the highest scores have higher probability of being selected (Fortin et al. 2005).
We generated 10 random steps per observed step with random turning angles drawn from a uniform distribution between − π and π. For step length, following Zeller et al. (2012), we considered that using random steps in close proximity to observed steps would underestimate avoidance behaviour. Therefore, we sampled step length from a uniform distribution, with a minimum of 50 m from the observed location and set the maximum to 200 m which roughly corresponds to the 95th percentile of the observed step length distribution over all individuals (190 m; see Panzacchi et al. 2016). We used the same distribution of step lengths to create random steps for time lags > 10 min (generated by the removal of locations assumed to be during resting, see above) as the distance would only vary by ± 10 m. Note that, most of the time lags were ≤ 20 min (94%). SSF may be estimated by comparing habitat characteristics along the intervening corridor between observed and random steps. However, because we used high temporal resolution data (thus relatively short steps), we considered the habitat at the endpoint of a step to be a reliable measure of the habitat encountered during movement (Thurfjell et al. 2014). Because our landscape descriptors were generated as distances to each habitat feature, this approximation is unlikely to significantly bias our results. We thus compared the distances to our six habitat features at the endpoint of a given observed step with those at the endpoints of the corresponding random steps.
We defined four seasons based on the life cycle of roe deer (Sempéré et al. 1998) and environmental variation in resource and risk. That is, two seasons with low resource productivity and highly disruptive hunting in autumn (September 21st–December 20th) and winter (December 21st–March 19th) and two seasons with high resource productivity and no hunting in spring (March 20th–June 20th) and less disruptive hunting in summer (June 21st–September 22th). At a daily scale, we defined three periods during which contrasting activity patterns (Cederlund 1989) and habitat use (Padié et al. 2015) have been observed in roe deer: daytime, night-time and a crepuscular period from 2 h before until 2 h after both dawn and dusk (based on nautical twilight). We generated one set of SSF models for each time period (4 seasons and 3 periods of the day, i.e. 12 sets in total). We chose to split the data rather than including time period as an interaction with each landscape feature in order to limit the number of explanatory variables and interactions in the models as they already contained six habitat features with associated interactions. Moreover, interactions between landscape variables and temporal variables cannot be tested using conditional logistic models as the random locations have the same attribution (e.g. “winter”) as the true GPS location that they are related to.
The models were based on approximately the same number of individuals per time period (n = 139–170; Online Resource Table S1). For each time period (n = 12) separately, we generated a set of all possible fixed-effect models based on location data from all individuals and using the six landscape descriptors (distance to woodland, to hedgerows, to roads, to buildings, to crops and to meadows) and the five two-way interactions between distance to woodland and the other descriptors, as the selection of risky and/or rich habitats is likely dependent on the proximity of available refuge (Coulon et al. 2008). We then used a model selection procedure based on the Akaike Information Criterion (AIC, Burnham and Anderson 2002) to identify the model that best described the data for each time period. We also estimated the relative importance of each landscape descriptor on movements for each time period by summing the AIC weights (AICw) of each SSF model in which a given landscape descriptor was included (see Table 1; Burnham and Anderson 2002). We thus ran this procedure separately for each time period to assign weights to each landscape descriptor for each time period. We used a k-fold cross-validation procedure adapted for case–control design by Fortin et al. (2009) to evaluate the predictive power (rs) of the final SSF model for each time period. We used 80% of the location data to generate the SSF models and the 20% of remaining locations to test their predictive power. As a reference, we also evaluated model performance on paired-random locations (see Fortin et al. 2009). This procedure also provided information on the relative strength of habitat selection for each time period, with a high predictive power reflecting strong selection behaviour. All analyses were conducted using R 3.4.1 (R Core Team 2016), and the packages “adehabitatLT” for animal movements (Calenge 2006), “survival::coxph” for SSF estimation (Therneau and Lumley 2017) and “hab” (Basille 2015) to generate random steps.
Landscape connectivity maps
For each time period, we generated a map of fine-scale landscape connectivity based on the output of the final SSF model (highest AICw) and the environmental and human infrastructure layers describing the study area. Basically, for each pixel of the study area, we multiplied the selection coefficients by the corresponding distances to the given habitat feature. Although it may underestimate variability in space-use compared to more complex simulation-based approaches (Signer et al. 2017), this approach is widely used to generate landscape connectivity maps. Following Panzacchi et al. (2016), we inverted and rescaled the original values of the models to range between 0 (low connectivity) and 1 (high connectivity) as follows:
where β i are the coefficients estimated by the model (Eq. 1) and x 1 to x p the values of the landscape descriptors for each pixel j of the study area.
To facilitate further analyses and interpretation of these results, we split pixels into two groups considered to indicate relatively favourable and relatively unfavourable areas for movement using the cut off value of C = 0.5. This value corresponded to the averaged median value of C for the twelve time periods (range = [0.31–0.55]). In order to evaluate spatial and temporal variation in landscape connectivity, we then estimated two metrics for each time period: (1) the proportion of relatively favourable pixels for movement (i.e. proportion of pixels with C ≥ 0.5) and (2) the number of patches, where a patch is defined as a group of interconnected pixels with C ≥ 0.5. Based on these two metrics, we described enlargement, contraction, creation or extinction of favourable patches. In particular, we estimated the proportion of areas that were similarly favourable (or unfavourable) between consecutive seasons and the proportion of areas that switched to become favourable (or unfavourable) during consecutive seasons.
Results
The SSF models adequately predicted true roe deer movements compared to random movements (rs significantly > 0 for true GPS locations, whereas rs = 0 for random locations; Fig. 2). However, the predictive power of the retained models varied among time periods, and was stronger for winter and for daytime compared to other periods (Fig. 2). Indeed, predictive power was lowest for the summer night-time period.

Result of k-fold cross-validation for case–control design for each step selection model. The higher the positive correlation, the higher the predictive power (rs) of the model. Black dots represent actual roe deer relocations; gray dots represent samples of random locations. “Crep” corresponds to crepuscular time periods
Landscape features influence roe deer movements
For the sake of simplicity, we only present detailed results for the two most contrasted seasons in terms of habitat selection, winter and summer, and the two most contrasted periods of the day, daytime (Fig. 3) and night-time (Fig. 4). The detailed results for spring and autumn, and during dawn and dusk for all seasons are presented in the supplementary materials (Figs. S2–S5).

Relative probabilities of step selection for roe deer in relation to the distance to each landscape descriptor in winter (thick lines) and summer (thin lines) during daytime. The solid lines give relative probabilities when relatively close to woodlands (fixed to 20 m) and the dashed lines when relatively far (fixed to 100 m) from woodland. Dotted lines represent the main effect of the landscape descriptor when the two-way interaction with distance to woodlands was not retained in the final model. Gray shading represents standard errors. All the other landscape descriptors included in the models are set to their average values. a and b distance to roads, c and d distance to buildings, e and f distance to woodlands, g and h distance to hedgerows, i and j distance to meadows, k and l distance to crop fields

Relative probabilities of step selection for roe deer in relation to the distance to each landscape descriptor in winter (thick lines) and summer (thin lines) during night-time. The solid lines give relative probabilities when relatively close to woodlands (fixed to 20 m) and the dashed lines when relatively far (fixed to 100 m) from woodland. Dotted lines represent the main effect of the landscape descriptor when the two-way interaction with distance to woodlands was not retained in the final model. Gray shading represents standard errors. All the other landscape descriptors included in the models are set to their average values. a and b distance to roads, c and d distance to buildings, e and f distance to woodlands, g distance to hedgerows, h and i distance to meadows, j and k distance to crop fields
Irrespective of the season, roe deer were more selective in terms of the habitats they used during daytime, as more landscape descriptors were retained in the best models compared to night-time or the dawn/dusk period (Table 1). For each time period, distance to woodlands and distance to buildings were the two landscape descriptors with the strongest influence on routine movements (weights ≥ 0.98; Table 1). Furthermore, the influence of the habitat features was strongly dependent on the proximity to woodlands, as the two-way interactions with one or more of the other covariates improved model fit in almost all cases (Tables 1 and 2).
During daytime in winter, the probability that roe deer moved in close proximity (20 m) to human infrastructures was four times lower when far (100 m) from woodlands than when close (20 m) to woodlands (about 0.1 ± 0.03 vs. 0.4 ± 0.03, respectively, for both roads and buildings; see Fig. 3a, c). This probability was also lower than during summer irrespective of woodland proximity. Indeed, during daytime in winter, roe deer almost never moved further than 200 m from woodlands (probability of being 200 m from woodlands = 0.02 ± 0.01), but were much more inclined to do so during summer (probability of being 200 m from woodlands = 0.34 ± 0.06, Fig. 3e, f). When far from woodlands (100 m), roe deer moved in close proximity to hedgerows (e.g. the probability dropped by 0.28 from when within 0 m to 100 m of a hedgerow during winter; Fig. 3g). The probability that roe deer moved across open habitats (meadows and crop fields) during daytime in winter was more than twice as high when they were close to woodlands (20 m) than when far from woodlands (100 m) (Fig. 3 i–l). During daytime in summer, roe deer moved through meadows more than in winter, but only when close to woodlands (Fig. 3i, j).
In contrast, compared to daytime, the influence of the landscape descriptors on roe deer movements during night-time (Fig. 4) differed markedly. Generally, the probability of moving in close proximity to roads and buildings was only slightly lower than moving far from these structures, irrespective of the season (Fig. 4 a–d). With respect to risk exposure, when in open habitats and far from woodlands during the night, in winter, roe deer preferred to move in close proximity to meadows but far from crop fields (Fig. 4 h–k). In contrast, the probability that a deer moved in close proximity to crop fields was higher in summer than in winter, while meadows had less influence (Fig. 4 h–k). Finally, when far from woodlands at night, roe deer preferred to move in close proximity to hedgerows in winter (Fig. 4g), but not in summer.
The influence of landscape features on roe deer movements was less marked during spring and autumn, and during the crepuscular periods (Online Resource Figs. S2–S5). Globally, the selected models indicated that these periods were transitional phases between winter and summer and between day and night, respectively, such that the effect of a given habitat feature was intermediate.
Landscape connectivity maps for roe deer
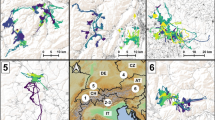
Using the models selected in the above analysis, we generated maps of landscape connectivity that were very different among periods (Fig. 5). During daytime, the proportion of the landscape with a relatively high probability that roe deer moved through it (C ≥ 0.5) was low (below 40%; Table 3) compared to night-time (up to 92%; Table 3). Whereas these values were relatively similar across seasons during the day, they differed markedly during night-time. The proportion of the landscape that was used with a relatively high probability at night peaked in summer (92%) and was lowest in autumn (56%; Table 3).

Landscape connectivity maps for roe deer during different periods: winter during daytime (a) and night-time (b), and in summer during daytime (c) and night-time (d)
Temporal variation in landscape connectivity for roe deer
Overall, the increase from daytime to night-time in the proportion of the landscape that favoured roe deer movements (i.e. high connectivity, C ≥ 0.5) was associated with a decrease in the number of favourable patches, irrespective of the season (Table 4). Given that almost all zones that were favourable during daytime were also favourable at night (Table 4), this higher connectivity at night was thus due to the increase in size and the inter-connection of favourable daytime patches.
During daytime, the proportion of the landscape with similar status, i.e. high (C ≥ 0.5) or low (C < 0.5) connectivity, between consecutive seasons was high (81.4% from winter to spring and 91.3% from autumn to winter; Table 4). Thus, almost all highly connected zones in a given season were also highly connected during the following season. This was less so during the transition from summer to autumn (during the day), when the proportion of highly connected zones decreased markedly (16.2%).
In contrast, during night-time, there were marked shifts in connectivity between consecutive seasons (Table 4). The greatest difference was between spring and summer, when 29.6% of the zones with low connectivity in spring were actually highly connected in summer. Finally, at night-time, less than 1% of the study area had low levels of connectivity in both spring and summer. In contrast, 37.5% of the zones that were highly connected in summer had low levels of connectivity in autumn.
Discussion
We developed a spatially-explicit model to describe temporal shifts in functional landscape connectivity for roe deer across a multiple-use landscape. We quantified differences in landscape connectivity among periods of the day and seasons of the year in response to spatio-temporal fluctuations in the risk-resource trade-off linked to pronounced variation in the level of human activity and resource availability.
Circadian and seasonal variations in habitat selection during fine-scale routine movements
Supporting H1, our analyses demonstrated that roe deer movements were influenced not only by variation in resource availability, but also strongly by circadian and seasonal fluctuations in the level of human activity. During the riskiest seasons, and especially during the day, roe deer movements were markedly constrained by the spatial distribution of refuge habitats, notably woodland and hedgerows (supporting P1a). Consistent with previous results (Bonnot et al. 2013; Padié et al. 2015), there was a clear transition in the degree to which roe deer selected proximity to woodlands during routine movements between daytime (including crepuscular periods), when human activity is high, and night-time. Similarly, irrespective of the season, roe deer avoided anthropogenic structures during the day (see also Coulon et al. 2008), particularly when far from woodlands in winter. Human activities clearly have a profound incidence on the ranging behaviour of large herbivores and strongly constrain their movements (Lone et al. 2015; Prokopenko et al. 2017).
In winter, roe deer remained close to woodlands when in open habitat meadows and crop fields) during the day. These areas are devoid of concealing cover, except at maturity, so that roe deer presumably perceive them as riskier, particularly when far from refuge habitat (Bonnot et al. 2017). However, at night, when the risk of encountering humans is lower, they preferentially moved in close proximity to meadows. Although meadows provide little cover and low biomass in winter (Morellet et al. 2011), quality forage is scarce everywhere during this season. In contrast, roe deer moved preferentially in close proximity to crop fields during summer and autumn when they provide both abundant forage resources and concealment (Hewison et al. 2009; Morellet et al. 2011; Bonnot et al. 2013). Overall, our results indicate that proximity to woodlands is key to the perception of risk when foraging in open habitats or close to humans, and that hedgerows may constitute a substitutable refuge habitat with similar forage resources (Morellet et al. 2011).
During the hunting season, roe deer therefore have to trade-off security against other needs, in particular food resources. Their movements are strongly constrained during daytime due to human disturbance and hunting activities, increasing the need to explore more during night-time in order to locate food resources which are less widespread in the landscape during this season. Therefore, while landscape connectivity is mainly driven by the ‘landscape of fear’ during daytime, the ‘landscape of forage’ is more important during night-time (see Palmer et al. 2017).
Circadian and seasonal shifts in landscape connectivity
At fine spatio-temporal scales, relatively low landscape connectivity may impede or hamper certain activities such as finding areas providing food resources, cover and mates. Seasonal shifts in the level of local landscape connectivity may thus affect key life history traits, for example, juvenile survival during the fawning season or adult survival during the hunting season, as well as juvenile dispersal during spring (Debeffe et al. 2012) and population structure. Landscape connectivity varied greatly among seasons and periods of the day. Connectivity was highest in summer and lowest in autumn, during the hunting season, supporting our prediction P1b that that small scale landscape connectivity should be lower during autumn/winter compared to spring/summer (see Figs S6 and S7). The abrupt contraction in autumn in the extent of areas that favoured roe deer movements is likely driven by the onset of the hunting season, potentially resulting in spatial heterogeneity in adult survival related to local landscape structure.
The role of roe deer as an ecosystem engineer
By affecting spatial behaviour of large herbivores, humans may provoke cascading effects on the biotic and abiotic flows that they mediate over the landscape, thus modulating the role of these ecosystem engineers (Earl and Zollner 2017). More generally, within a management framework, we can expect the spatial distribution of ecosystem services and disservices associated with the presence of large wild herbivores to be strongly dependent on small-scale functional connectivity (Mitchell et al. 2013). As such, investigating landscape connectivity for roe deer provides a basis for predicting how their routine movements may potentially influence ecosystem processes.
Deer have been shown to be effective dispersers of the seeds of a number of plant species (Gill and Beardall 2001) over considerable distances (Pakeman 2001), through consumption in one landscape compartment and excretion in another. We found that landscape connectivity was relatively high during spring, generally the key period for seed dispersal. Roe deer may thus facilitate seed transfer between open and forested landscape compartments during this period. In contrast, landscape connectivity was much lower in autumn, with almost half of the landscape unfavourable for roe deer movement. As such, roe deer may influence the spatial distribution of plant species that grow and produce seeds in spring more than those that seed in autumn, therefore affecting the vegetation composition of the landscape.
Roe deer may also have a strong impact on vector dispersal, as tick densities have been shown to be correlated with deer space use (Kilpatrick et al. 2017). Ticks are particularly abundant and exhibit questing behaviour in spring (Cat et al. 2017). That is, they wait for passing hosts to climb on to, generally during darkness (Perret et al. 2003; Qviller et al. 2014). As landscape connectivity for roe deer during the night was much higher than during the day, tick transfer was presumably facilitated between habitat compartments, particularly in spring. However, tick survival is higher in areas with high forest cover (Kiffner et al. 2010; Qviller et al. 2016) and roe deer moved within woodlands less during the tick questing period (spring) than during the tick dormant period (autumn/winter).
The potential role of vector species for tick transfer, nutrient fluxes and seed dispersal may thus be lower than expected from connectivity maps which pool seasons and periods of the day. Animal movement strategy is central to understanding fluxes of materials across ecosystems (Earl and Zollner 2017). Our predictive maps for the mobility of roe deer as an ecosystem engineer involved in the transport of nutrients, seeds or vector may thus help to predict where significant transfer of subsidies (e.g. pathogens and nutrients) may occur within the landscape. Overall, landscape connectivity for roe deer was relatively high at night across all seasons (except autumn), ensuring that roe deer potentially plays a key role as a widespread ecosystem engineer across Europe.
As expected (P2a), for a given time of day, almost all areas with a high level of connectivity for roe deer in autumn and winter were also highly connected in spring and summer. This indicates that roe deer moved through these areas throughout the whole year, with implications for some ecosystem services (e.g. nutrient transfer) and disservices, (e.g. facilitation of tick-borne pathogen circulation). Contrary to prediction P2b, this dynamic not only consisted in enlargement of existing favourable patches, but was also dependant on the season. From summer to autumn, the abrupt decrease in the extent of favourable areas resulted in their fragmentation into isolated patches during night-time and the disappearance of some connected patches during daytime. This may induce local scale heterogeneity in ecosystem services/disservices, for example, fragmenting the landscape for ticks, and so influencing their population dynamics and, thus, the dynamics of pathogen transfer at the landscape scale (Allan et al. 2003, 2017; Brownstein et al. 2005).
Conclusion and perspectives
Our study highlights the importance of considering temporal variation in movement behaviour to accurately map landscape connectivity. Most studies of landscape connectivity based on individual movements use a static approach, pooling movement data over seasons and time of day, or only consider one particular time period (Coulon et al. 2008). However, functional connectivity is inherently dynamic, especially in human-dominated landscapes, and must be assessed accordingly. Our approach is innovative, allowing managers to visualise and quantify any expansion/reduction in connectivity over ecologically meaningful periods. This could therefore be key for identifying corridors where vectors are likely to promote ecological flows, with impacts on the spatial distribution of services and disservices. For example, understanding and mapping the temporal dynamics of functional landscape connectivity for potential pathogen hosts could be critical for predicting pathogen occurrence and more accurately targeting areas for biocontrol.
Data availability statement
The dataset analysed during the current study is available from EURODEER under request.
References
Abbas F, Merlet J, Morellet N, Verheyden H, Hewison AJM, Cargnelutti B, Angibault JM, Picot D, Rames JL, Lourtet B (2012) Roe deer may markedly alter forest nitrogen and phosphorus budgets across Europe. Oikos 121:1271–1278
Adrados C, Girard I, Gendner J-P, Janeau G (2002) Global positioning system (GPS) location accuracy improvement due to selective availability removal. C R Biol 325:165–170
Albert A, Auffret AG, Cosyns E, Cousins SAO, D'hondt B, Eichberg C, Eycott, AE, Heinken T, Hoffmann M, Jaroszewicz B (2015) Seed dispersal by ungulates as an ecological filter: a trait-based meta-analysis. Oikos 124:1109–1120
Allan BF, Keesing F, Ostfeld RS (2003) Effect of forest fragmentation on lyme disease risk. Conserv Biol 17:267–272
Allan BF, Tallis H, Chaplin-Kramer R, Huckett S, Kowal VA, Musengezi J, Okanga S, Ostfeld RS, Schieltz J, Warui CM (2017) Can integrating wildlife and livestock enhance ecosystem services in central Kenya? Front Ecol Environ 15:328–335
Baguette M, Van Dyck H (2007) Landscape connectivity and animal behavior: functional grain as a key determinant for dispersal. Landscape Ecol 22:1117–1129
Basille M (2015) hab: Habitat and movement functions. URL http://ase-research.org/basille/hab
Bélisle M (2005) Measuring landscape connectivity: the challenge of behavioral landscape ecology. Ecology 86:1988–1995
Benhaiem S, Delon M, Lourtet B, Cargnelutti B, Aulagnier S, Hewison AJM, Morellet N, Verheyden H (2008) Hunting increases vigilance levels in roe deer and modifies feeding site selection. Anim Behav 76:611–618
Benhamou S, Cornélis D (2010) Incorporating movement behavior and barriers to improve kernel home range space use estimates. J Wildl Manag 74:1353–1360
Bjorneraas K, Solberg EJ, Herfindal I, Van Moorter B, Rolandsen CM, Tremblay JP, Skarpe C, Saether BE, Eriksen R, Astrup R (2011) Moose Alces alces habitat use at multiple temporal scales in a human-altered landscape. Wildl Biol 17:44–54
Bjørneraas K, Van Moorter B, Rolandsen CM, Herfindal I (2010) Screening global positioning system location data for errors using animal movement characteristics. J Wildl Manag 74:1361–1366
Bonnot NC, Morellet N, Verheyden H, Cargnelutti B, Lourtet B, Klein F, Hewison AJM (2013) Habitat use under predation risk: hunting, roads and human dwellings influence the spatial behaviour of roe deer. Eur J Wildl Res 59:185–193
Bonnot NC, Hewison AJM, Morellet N, Gaillard J-M, Debeffe L, Couriot O, Cargnelutti B, Chaval Y, Lourtet B, Kjellander P (2017) Stick or twist: roe deer adjust their flight behaviour to the perceived trade-off between risk and reward. Anim Behav 124:35–46
Brown JS, Laundré JW, Gurung M (1999) The ecology of fear: optimal foraging, game theory, and trophic interactions. J Mammal 80:385–399
Brownstein JS, Skelly DK, Holford TR, Fish D (2005) Forest fragmentation predicts local scale heterogeneity of Lyme disease risk. Oecologia 146:469–475
Burnham KP, Anderson DR (2002) Model selection and multi-model inference: a practical information-theoretic approach. Springer, New York
Calenge C (2006) The package “adehabitat” for the R software: a tool for the analysis of space and habitat use by animals. Ecol Model 197:516–519
Cargnelutti B, Coulon A, Hewison AJM, Goulard M, Angibault J-M, Morellet N (2007) Testing global positioning system performance for wildlife monitoring using mobile collars and known reference points. J Wildl Manag 71:1380–1387
Cat J, Beugnet F, Hoch T, Jongejan F, Prangé A, Chalvet-Monfray K (2017) Influence of the spatial heterogeneity in tick abundance in the modeling of the seasonal activity of Ixodes ricinus nymphs in Western Europe. Exp Appl Acarol 71:115–130
Cederlund G (1989) Activity patterns in moose and roe deer in a north boreal forest. Ecography 12:39–45
Chastagner A, Pion A, Verheyden H, Lourtet B, Cargnelutti B, Picot D, Poux V, Bard E, Plantard O, McCoy KD (2017) Host specificity, pathogen exposure, and superinfections impact the distribution of Anaplasma phagocytophilum genotypes in ticks, roe deer, and livestock in a fragmented agricultural landscape. Infect Genet Evol 55:31–44
Ciuti S, Northrup JM, Muhly TB, Simi S, Musiani M, Pitt JA, Boyce MS (2012) Effects of humans on behaviour of wildlife exceed those of natural predators in a landscape of Fear. PLoS ONE 7:e50611
Conner LM, Smith MD, Burger L (2003) A comparison of distance-based and classification-based analyses of habitat use. Ecology 84:526–531
Conway J, Eddelbuettel D, Nishiyama T, Kumar Prayaga S, Tiffin N (2017) RPostgreSQL: R interface to the “PostgreSQL” database system [Internet]. Available from: https://cran.r-project.org/web/packages/RPostgreSQL/index.html
Côté SD, Rooney TP, Tremblay J-P, Dussault C, Waller DM (2004) Ecological impacts of deer overabundance. Annu Rev Ecol Evol Syst 35:113–147
Coulon A, Cosson J, Angibault J, Cargnelutti B, Galan M, Morellet N, Petit E, Aulagnier S, Hewison AJM (2004) Landscape connectivity influences gene flow in a roe deer population inhabiting a fragmented landscape: an individual–based approach. Mol Ecol 13:2841–2850
Coulon A, Morellet N, Goulard M, Cargnelutti B, Angibault J-M, Hewison AJM (2008) Inferring the effects of landscape structure on roe deer (Capreolus capreolus) movements using a step selection function. Landscape Ecol 23:603–614
Debeffe L, Morellet N, Cargnelutti B, Lourtet B, Bon R, Gaillard J-M, Hewison AJM (2012) Condition-dependent natal dispersal in a large herbivore: heavier animals show a greater propensity to disperse and travel further. J Anim Ecol 81:1327
Earl JE, Zollner PA (2017) Advancing research on animal-transported subsidies by integrating animal movement and ecosystem modeling. J Anim Ecol 86:987–997
Ellis EC, Klein Goldewijk K, Siebert S, Lightman D, Ramankutty N (2010) Anthropogenic transformation of the biomes, 1700 to 2000. Glob Ecol Biogeogr 19:589–606
Fortin D, Beyer HL, Boyce MS, Smith MS, Duchesne T, Mao JS (2005) Wolves influence elk movements: behavior shapes a trophic cascade in Yellowstone National Park. Ecology 86:1320–1330
Fortin D, Fortin M-E, Beyer HL, Duchesne TCourant S, Dancose K (2009) Group-size-mediated habitat selection and group fusion–fission dynamics of bison under predation risk. Ecology 90:2480–2490
Frid A, Dill LM (2002) Human-caused disturbance stimuli as a form of predation risk. Conserv Ecol 6:11
Fryxell JM, Hazell M, Börger L, Dalziel BD, Haydon DT, Morales JM, McIntosh T, Rosatte RC (2008) Multiple movement modes by large herbivores at multiple spatiotemporal scales. Proc Natl Acad Sci 105:19114–19119
Gill RMA, Beardall V (2001) The impact of deer on woodlands: the effects of browsing and seed dispersal on vegetation structure and composition. Forestry 74:209–218
Grignolio S, Merli E, Bongi P, Ciuti S, Apollonio M (2011) Effects of hunting with hounds on a non-target species living on the edge of a protected area. Biol Conserv 144:641–649
Hewison AM, Angibault J-M, Cargnelutti B, Coulon A, Rames J-L, Serrano E, Verheyden H, Morellet N (2007) Using radio-tracking and direct observation to estimate roe deer Capreolus capreolus density in a fragmented landscape: a pilot study. Wildl Biol 13:313–320
Hewison A, Morellet N, Verheyden H, Daufresne T, Angibault J-M, Cargnelutti B, Merlet J, Picot D, Rames J-L, Joachim J (2009) Landscape fragmentation influences winter body mass of roe deer. Ecography 32:1062–1070
Hobbs NT (1996) Modification of ecosystems by ungulates. J Wildl Manag 60:695–713
Jeltsch F, Bonte D, Pe’er G, Reineking B, Leimgruber P, Balkenhol N, Schröder B, Buchmann CM, Mueller T, Blaum N, Zurell D, Böhning-Gaese K, Wiegand T, Eccard JA, Hofer H, Reeg J, Eggers U, Bauer S (2013) Integrating movement ecology with biodiversity research-exploring new avenues to address spatiotemporal biodiversity dynamics. Mov Ecol 1:6
Jones CG, Lawton JH, Shachak M (1997) Positive and negative effects of organisms as physical ecosystem engineers. Ecology 78:1946–1957
Kiffner C, Lödige C, Alings M, Vor T, Rühe F (2010) Abundance estimation of Ixodes ticks (Acari: Ixodidae) on roe deer (Capreolus capreolus). Exp Appl Acarol 52:73–84
Kilpatrick AM, Dobson AD, Levi T, Salkeld DJ, Swei A, Ginsberg HS, Kjemtrup A, Padgett KA, Jensen PM, Fish D (2017) Lyme disease ecology in a changing world: consensus, uncertainty and critical gaps for improving control. Phil Trans R Soc B 372:20160117
Laundré JW, Hernández L, Ripple WJ (2010) The landscape of fear: ecological implications of being afraid. Open Ecol J 3:1–7
Lima SL, Zollner PA (1996) Towards a behavioral ecology of ecological landscapes. Trends Ecol Evol 11:131–135
Linnell J, Duncan P, Andersen R (1998) The European roe deer: a portrait of a successful species. In: The European roe deer: the biology of success. Scand Univ Press Oslo, pp. 11–22
Lone K, Loe LE, Meisingset EL, Stamnes I, Mysterud A (2015) An adaptive behavioural response to hunting: surviving male red deer shift habitat at the onset of the hunting season. Anim Behav 102:127–138
Martin J, Benhamou S, Yoganand K, Owen-Smith N (2015) Coping with spatial heterogeneity and temporal variability in resources and risks: adaptive movement behaviour by a large grazing herbivore. PLoS ONE 10:e0118461
Mitchell MGE, Bennett EM, Gonzalez A (2013) Linking landscape connectivity and ecosystem service provision: current knowledge and research gaps. Ecosystems 16:894–908
Morellet N, Van Moorter B, Cargnelutti B, Angibault J-M, Lourtet B, Merlet J, Ladet S, Hewison AJM (2011) Landscape composition influences roe deer habitat selection at both home range and landscape scales. Landscape Ecol 26:999–1010
Mysterud A, Easterday WR, Stigum VM, Aas AB, Meisingset EL, Viljugrein H (2016) Contrasting emergence of Lyme disease across ecosystems. Nat Commun 7:11882
Nathan R, Getz WM, Revilla E, Holyoak M, Kadmon R, Saltz D, Smouse PE (2008) A movement ecology paradigm for unifying organismal movement research. Proc Natl Acad Sci 105:19052–19059
Owen-Smith N, Fryxell J, Merrill E (2010) Foraging theory upscaled: the behavioural ecology of herbivore movement. Philos Trans R Soc Lond B 365:2267–2278
Owen-Smith N, Goodall V, Fatti P (2012) Applying mixture models to derive activity states of large herbivores from movement rates obtained using GPS telemetry. Wildl Res 39:452–462
Padié S, Morellet N, Hewison AJM, Martin J-L, Bonnot N, Cargnelutti B, Chamaillé-Jammes S (2015) Roe deer at risk: teasing apart habitat selection and landscape constraints in risk exposure at multiple scales. Oikos 124:1536–1546
Pakeman R (2001) Plant migration rates and seed dispersal mechanisms. J Biogeogr 28:795–800
Palmer M, Fieberg J, Swanson A, Kosmala M, Packer C (2017) A ‘dynamic’ landscape of fear: prey responses to spatiotemporal variations in predation risk across the lunar cycle. Ecol Lett 20:1364–1373
Panzacchi M, Van Moorter B, Strand O, Saerens M, Kivimäki I, St. Clair CC, Herfindal I, Boitani L (2016) Predicting the continuum between corridors and barriers to animal movements using step selection functions and randomized shortest paths. J Anim Ecol 85:32–42
Perret J-L, Guerin PM, Diehl PA, Vlimant M, Gern L (2003) Darkness induces mobility, and saturation deficit limits questing duration, in the tick Ixodes ricinus. J Exp Biol 206:1809–1815
Picard M, Papaïx J, Gosselin F, Picot D, Bideau E, Baltzinger C (2015) Temporal dynamics of seed excretion by wild ungulates: implications for plant dispersal. Ecol Evol 5:2621–2632
Prokopenko CM, Boyce MS, Avgar T (2017) Extent-dependent habitat selection in a migratory large herbivore: road avoidance across scales. Landscape Ecol 32:313–325
Qviller L, Grøva L, Viljugrein H, Klingen I, Mysterud A (2014) Temporal pattern of questing tick Ixodes ricinus density at differing elevations in the coastal region of western Norway. Parasit Vectors 7:179
Qviller L, Viljugrein H, Loe LE, Meisingset EL, Mysterud A (2016) The influence of red deer space use on the distribution of Ixodes ricinus ticks in the landscape. Parasit Vectors 9:545
R Core Team (2016) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, 2015. https://www.R-project.org/
Ruiz-Fons F, Gilbert L (2010) The role of deer as vehicles to move ticks, Ixodes ricinus, between contrasting habitats. Int J Parasitol 40:1013–1020
Seagle SW (2003) Can ungulates foraging in a multiple-use landscape alter forest nitrogen budgets? Oikos 103:230–234
Sempéré A, Mauget R, Mauget C (1998) Reproductive physiology of roe deer. In: Andersen R, Duncan P, Linnell JDC (eds) The European roe deer: the biology of success. Scandinavian University Press, Oslo, pp 161–188
Signer J, Fieberg J, Avgar T (2017) Estimating utilization distributions from fitted step-selection functions. Ecosphere 8:e01771
Taylor PD, Fahrig L, Henein K, Merriam G (1993) Connectivity is a vital element of landscape structure. Oikos 68:571–573
Therneau TM, Lumley T (2017) survival: Survival Analyses. R-package version 2.41-3. Available from: https://cran.r-project.org/package=survival
Thurfjell H, Ciuti S, Boyce MS (2014) Applications of step-selection functions in ecology and conservation. Mov Ecol 2:1–12
Trombulak SC, Frissell CA (2000) Review of ecological effects of roads on terrestrial and aquatic communities. Conserv Biol 14:18–30
Van Beest FM, Mysterud A, Loe LE, Milner JM (2010) Forage quantity, quality and depletion as scale-dependent mechanisms driving habitat selection of a large browsing herbivore. J Anim Ecol 79:910–922
Vourc’h G, Abrial D, Bord S, Jacquot M, Masseglia S, Poux V, Pisanu B, Bailly X, Chapuis J-L (2016) Mapping human risk of infection with Borrelia burgdorferi sensu lato, the agent of Lyme borreliosis, in a periurban forest in France. Ticks Tick-Borne Dis 7:644–652
Zeller KA, McGarigal K, Whiteley AR (2012) Estimating landscape resistance to movement: a review. Landscape Ecol 27:777–797
Acknowledgements
We thank the local hunting associations, the Fédération Départementale des Chasseurs de la Haute-Garonne for allowing us to work in the Comminges, as well as all coworkers and volunteers for help collecting data. We thank two anonymous referees for constructive comments on a previous version of the manuscript. This work was performed using the facilities of the CC LBBE/PRABI and was supported by the “EUROENET” ANR grant ANR-14-CE02-0017-01 and the “OSCAR” ANR grant ANR-11 AGRO 001 05.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Martin, J., Vourc’h, G., Bonnot, N. et al. Temporal shifts in landscape connectivity for an ecosystem engineer, the roe deer, across a multiple-use landscape. Landscape Ecol 33, 937–954 (2018). https://doi.org/10.1007/s10980-018-0641-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10980-018-0641-0