
Abstract
This article describes a numerical method based on the dual reciprocity boundary element method (DRBEM) for solving some well-known nonlinear parabolic partial differential equations (PDEs). The equations include the classic and generalized Fisher’s equations, Allen–Cahn equation, Newell–Whithead equation, FitzHugh–Nagumo equation, and generalized FitzHugh–Nagumo equation with time-dependent coefficients. The concept of the dual reciprocity is used to convert the domain integral to the boundary that leads to an integration-free method. We employ the time stepping scheme to approximate the time derivative, and the linear radial basis functions (RBFs) are used as approximate functions in the presented method. The nonlinear terms are treated iteratively within each time step. The developed formulation is verified in some numerical test examples. The results of numerical experiments are compared with analytical solution to confirm the accuracy and efficiency of the presented scheme.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
The dual reciprocity boundary element method (DRBEM) is a modern numerical scheme, which has enjoyed increasing popularity and has become one of the most general and effective numerical method for solving different engineering problems [4,5,6,7,8,9, 14, 16, 44]. Generally, the DRBEM is known as a numerical tool for solving two or higher dimensional partial differential equations (PDEs). However, some authors employed this approach for the numerical solution of some one-dimensional PDEs. For example, hyperbolic telegraph equation [19], nonlinear Klein-Gordon equation [20], nonlinear sine–Gordon equation [21], Cahn-Hilliard equation [22], stochastic differential equations [24, 25], and advection–diffusion equation [49] have been solved with the one-dimensional DRBEM approach. Also, some extension of this method is used for numerical solution of some engineering problems [10, 11].
In this study, a numerical solution based on the DRBEM is applied for solving some well-known one-dimensional nonlinear parabolic PDEs. The idea behind this approach comes from the classic DRBEM introduced by Brebbia and Nardini [15] and Partridge and Brebbia [16] for solving higher-order dimensional problems and expanding the inhomogeneous and nonlinear terms in terms of their values at the nodes which lie in the domain of the problem. The inhomogeneous term is approximated by interpolation in terms of some well-known functions \(\phi (r)\), called radial basis functions (RBFs), where r is the distance between a source point and the field point.
Our concern in the current work is to present a numerical method based on the DRBEM for solving the following nonlinear parabolic PDEs
subject to the initial condition
and the boundary conditions
where \(\nu (t), \mu (t)\), and \(\eta (t)\) are arbitrary real-valued functions of t. F(u) in Eq. (1), written as \(F_l(u)+F_n(u)\), where \(F_l\) and \(F_n\) denote the linear and nonlinear parts of F, respectively. Equation (1) for different values of \(\nu , \mu , \eta\), and F yields the following well-known problems:
Case 1: the Fitzhugh–Nagumo and real Newell–Whitehead equations
If we set \(\nu (t)=\mu (t)=\eta (t)=1\) and \(F(u)=u(1-u)(\rho -u)\) where \(0 \le \rho \le 1\), Eq. (1) deduces to classic Fitzhugh–Nagumo equation. In addition, if in Fitzhugh–Nagumo equation \(\rho\) takes the value \(-1\), then the classic Fitzhugh–Nagumo equation deduces to real Newell–Whitehead equation. The Fitzhugh–Nagumo equation has been derived by Fitzhugh [27] and Nagumo et al. [42]. Also, population genetics [12, 53, 54] is another area of application of the Fitzhugh–Nagumo equation. Kawahara and Tanaka [33], Nucci and Clarkson [41], Li and Guo [35], and Abbasbandy [1] have found some new solution of the Fitzhugh–Nagumo equation using the Hirota method, Jacobi elliptic function, first integral method, and homotopy analysis method, respectively. The Haar wavelet method [29], Pseudospectral methods [18], and the homotopy analysis method [53] are some numerical approaches that have been applied to present the approximate solution of the Fitzhugh–Nagumo equation. Meanwhile, the authors of [47] proposed the approximate conditional symmetry method to determine approximate solutions of Fitzhugh–Nagumo equation.
Case 2: the generalized Fitzhugh–Nagumo equation
Let \(\nu (t), \mu (t)\), and \(\eta (t)\) be an arbitrary function of t and let \(F(u)=u(1-u)(\rho -u)\). Then, Eq. (1) deduces to generalized Fitzhugh–Nagumo with time-dependent coefficients and linear dispersion term equation. The authors of [52] derived a new variety of soliton solutions using specific solitary wave ansatz and the tanh method for this equation. Meanwhile, Bhrawy [13] employed Jacobi–Gauss–Lobatto collocation method for the numerical solution of this equation.
Case 3: Fisher’s equation
Fisher’s equation is achieved when \(\nu (t)=\mu (t)=\eta (t)=1\) and \(F(u)=u(1-u)\). As mentioned in [37, 43, 56], Fisher proposed such equation as a model for the propagation of a mutant gene, with u denoting the density of an advantageous. This equation is encountered in chemical kinetics and population dynamics which include problems such as nonlinear evolution of a population in a one-dimensional habitat, neutron population in a nuclear reaction. Moreover, the same equation occurs in logistic population growth models, flame propagation, neurophysiology, autocatalytic chemical reactions, and branching Brownian motion processes. Sinc collocation method [2], B–spline Galerkin method [30, 40], wavelet Galerkin method [39], moving mesh method [45], finite element methods [46, 51], and finite difference [38] are some numerical techniques that have been applied for the numerical solution of Fisher’s equation. Meanwhile, Wazwaz [56, 57] has found some exact solution for this equation with tanh-coth and Adomian decomposition methods.
Case 4: the Allen–Cahn and generalized Fisher’s equations
If we set \(\nu (t)=\mu (t)=\eta (t)=1\) and \(F(u)=u(1-u^{\alpha })\) in Eq. (1), the generalized Fisher equation will be obtained. In addition, Eq. (1) for \(\alpha =\)2 and \(\alpha >2\) is called the Allen–Cahn equation and generalized Fisher’s equation. Some useful numerical solutions of this equation are [17, 26, 28, 36]. In addition, [57] provides some exact solutions of these equations.
The organization of the current paper
This article is organized as follows: In "The propose method", the discretized version of equation is obtained, and an iterative scheme based on finite difference scheme is described for the time derivative. In "Numerical simulations", numerical results of some nonlinear parabolic PDEs have been presented, and the obtained results are compared with the exact solutions. "Conclusion" ends this report with a brief conclusion.
The proposed method
Suppose \(G_i=G(x,x_i)\) is the fundamental solution of the one-dimensional Laplace operator based on the source point \(x_i\), i.e.,
where x is the field point and \(\delta\) is Dirac delta function. The fundamental solution and its derivative are given as follows [34]:
where the symbol sgn denotes the signum function.
Consider Eq. (1) as follows:
Multiplying the above equation by \(G_i\), taking integration over [a, b] and applying the integration by parts, we get the following integral form:
where similarly to 2D formulation, \(c_i\) takes the values 1 and 1/2 when the source point is located in domain and on the boundary (the points a and b), respectively [16, 32].
The domain integral on the right-hand side of Eq. (7) still remains in the boundary elements formulation. This integral can be evaluated by dividing the domain into cells [31]. The motivation behind DRBEM is to avoid this procedure by transforming the domain integral to an equivalent boundary integral equation. This can be achieved by approximating the function b(x, t) in terms of radial basis functions (RBFs) at some chosen number in [a, b] as
So the function b can be expressed as
where \(\alpha _j(t), j=1,...,N\), are the corresponding interpolating coefficients, \(\phi _j\) represents the interpolation function, \(\phi\), from a field node to source node, i.e.,
where \(|x-x_j|\) denotes the distance between x and \(x_j\). The essential feature in DRBEM is to express \(\phi _j\), which is a function of \(r_j\), as a Laplacian of another function \(\psi _j\). Thus, \(\psi _j\) is chosen as the solution to [31]
In this paper, we will use linear RBFs as
The function \(\psi _j\) is easily determined as
With substitution expansion (9) for b(x, t), applying the integration by part once again, the domain integral in the right-hand side of Eq. (7) reduces to a boundary integral equation
where \(\psi _{ij}\) is the value of the function \(\psi _j\) at the ith source point. So from Eqs. (7) and (13), the following boundary integral equation can be achieved:
Imposing all the source points to satisfy Eq. (14) yields the following matrix form:
where \(\textbf{u}_{in}=[u(x_2),\cdots ,u(x_{N-1})]^T\), \(u_x(a)=u_x(a,t), u_x(b)=u_x(b,t), u(x_j)=u(x_j,t), j=1,...,N\) and \(\textbf{L}\) and \(\textbf{H}\) take the following form:
If each of the vectors
is considered to be one column of the matrices \(\Psi _x\), \(\Psi\), and \(\widetilde{\Psi }\), respectively, Eq. (15) takes the following matrix form:
On the other hand, Eq. (9) can be written in the following matrix form:
where \(\Phi _{ij}\) represents the value of the function \(\phi _j\) at source point \(x_i\) by \(\phi _{ij}\) for \(i =1, 2,...,N,\) and vector \(\textbf{b}\) takes the following form:
where
Now, Eq. (16) constitutes a nonlinear system of N equations in N unknown functions of t. This system is solved approximately using the iterative scheme based on the implicit finite difference technique as follows:
where \(\textbf{D}=[\textbf{L} \Psi _x - \textbf{H}\Psi +\widetilde{\Psi }]\) and \(\textbf{b}\) takes the following form for implicit time discretization:
Also, for Crank-Nicolson, time discretization takes the following form:
On the other hand, the solution of Eq. (1) can be approximated as follows [14]:
or in matrix form
Therefore, from Eqs. (23) and (24), we can write
So by substituting (25) in (21) and substituting the result in (20) and separating the known quantities from the unknown quantities, the value of \(\textbf{u}_{in}^n\) can be obtained by solving a nonlinear system of equation. To avoid solving the nonlinear system of equations, the following iterative algorithm has been proposed [23, 48, 50].
The predictor-corrector scheme
For dealing with the nonlinearity, in time level n at first put
With this substitution, Eq. (20) is solved as a system of linear algebraic equations for unknown \(\textbf{u}^n=\textbf{u}^{n,0}\). Recompute
Now, Eq. (20) is solved using the new \(\widetilde{\textbf{u}}\) for unknown \(\textbf{u}^{n,l}\). We are at time level n yet and iterate between calculating \(\widetilde{\textbf{u}}\) and computing the approximation values of the unknown \(\textbf{u}^{n,l}\) and putting
until the unknown quantity converges to within a prescribed number of the significant figures. In this paper, we will use the following condition for stopping the iterations in each time level:
where \(\epsilon\) is a fixed number. When this condition is satisfied, we put
and go on to the next time level. This process is iterated, until reaching the desirable time t.
Numerical simulations
To access both important parameters in numerical solution of problems, the accuracy, and the applicability of the procedure described in the previous section, some test examples are considered. In the following test problems, we will use the \(L_{\infty }\) and the root-means-squares (RMS) errors, as defined below, to report the errors
where
Also, in this part, we assume \(\epsilon =10^{-10}\).
Example 1
Consider the following Fitzhugh–Nagumo equation
subject to the initial condition
and the following boundary conditions:
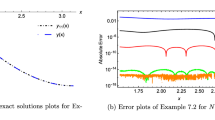
The exact solution of Eq. (32) is given by [13, 57]
Table 1 shows the numerical convergence of presented method for different types of time discretization methods. The error norms defined by (31) on grids for different kinds of RBFs (linear, multi-quadrics (MQ), \(\phi (r)=\sqrt{c^2 + r^2}\), and thin plate spline (TPS), \(\phi (r)= r^2 lnr\)) are reported in Table 2. Accordingly, these results with an increasing number of nodes are presented in Table 2. The results reveal that the error decreases when the number of nodes increases.
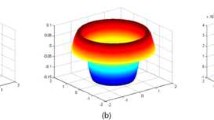
In addition, the results obtained for approximate solution along with estimate errors for time level \(t=1, 5, 10, 20, 40\) and \(t=100\) with \(h=1/8\) and \(t=1/1000\) in \(-10 \le x \le 10\) are shown in Fig. 1. The new method can be applied for Eq. (32) with other choices of \(\rho\). The space-time graph of approximate solution and related error estimate for \(\rho =-1\) (the real Newell–Whitehead equation) in domain \(-10 \le x \le 10\) for times \(t=0.25, 0.50, 0.75\) and \(t=1.0\) are reported in Fig. 2.
Example 2
Consider the following generalized Fitzhugh–Nagumo equation with time-dependent coefficients
Also, suppose that the initial and boundary conditions are taken from the exact solution given by [13, 52]
Table 3 lists the errors for this problem using the presented method with constant parameter \(a=-b=1\), \(\rho =1\), \(\tau =0.001\), \(t=1\) for different values of h.
In addition, with the mentioned parameters, the obtained estimate errors for fixed \(h=1/128\) and for various \(\tau\) are reported in Table 4.
We also draw the approximate solutions along with estimate errors for six choices of \(\rho =0.25, 0.50, 0.75, 1, 1.25\) and \(\rho =1.5\) in \(-10 \le x \le 10\) in Fig. 3. This figure shows that by increasing \(\rho\), the absolute error increases. In addition, the approximate solution in conjunction with the exact solution for \(\tau =0.001\), \(\rho =1.5\), and \(h=1/4\) at different times \(t=0.25, 0.50, 0.75\) and \(t=1\) are shown in Fig. 4.
Example 3
Consider the following generalized Fisher’s equation:
The exact solution of the above equation is given by [55, 56]
We assume that the initial and the Dirichlet boundary conditions are taken from the above exact solution. The approximate solutions and the estimate errors for this problem when \(\alpha =1, 2, 3, 4, 5\) and \(\alpha =6\) are shown in Fig. 5. As this figure shows, the estimate errors increase when the value of \(\alpha\) increases.

Graphs of approximated solutions along with estimate errors at times \(t=1, 5, 10, 20, 40\) and \(t=100\) obtained for Example 1 for constants \(t=1/1000\), \(h=1/8\), and \(\rho =3/4\) in \(-10 \le x \le 10\)

Graphs of approximated solutions (left plan) and their estimate errors (right) at times \(t=0.25, 0.5, 0.75\) and \(t=1.0\) obtained for Example 1 for constants \(\tau =1/1000\), \(h=1/8\), and \(\rho =-1\) in \(-10 \le x \le 10\)

Graphs of approximated solutions along with estimate errors at times \(t=1\) for various \(\rho =0.25, 0.50, 0.75, 1, 1.25\) and \(\rho =1.50\) obtained for Example 2 for constants \(t=1/1000\) and \(h=1/8\) in \(-10 \le x \le 10\)

Graphs of approximated solutions along with exact solutions at times \(t=0.25, 0.50, 0.75\) and \(t=1\) with \(\rho =1.50\) for Example 2 for constants \(t=1/1000\) and \(h=1/8\) in \(-10 \le x \le 10\)

Graphs of approximated solutions along with estimate errors for various \(\alpha =1, 2, 3, 4, 5\) and \(\alpha =6\) at time \(t=10\) obtained for generalized Fisher’s equation for constants \(t=1/1000\) and \(h=1/16\) in \(-2 \le x \le 2\)
Conclusion
In this article, a numerical method based on the dual reciprocity boundary elements method (DRBEM) is outlined for solving the one-dimensional nonlinear parabolic partial differential equations. The list of equations investigated includes Fisher’s equation, generalized Fisher’s equation, Allen–Cahn equation, Newell–Whithead equation, Fitzhugh–Nagumo equation, and generalized Fitzhugh–Nagumo equation with time variable coefficient. The dual reciprocity idea was applied to eliminate the domain integrals appearing in the boundary integral equation. Linear radial basis functions (RBFs) were used in the presented method as approximate functions. We used the implicit and Crank–Nicolson finite difference method in time and the boundary integral equation technique in space to discretize the main differential equation and convert it to a linear algebraic system of equations. The nonlinear terms are treated iteratively within each time step by using a simple predictor-corrector scheme. Numerical results are presented for some test problems to demonstrate the usefulness and accuracy of the new method.
Data availability
The data used in this research article is not applicable as no specific data sets were utilized. The conclusions and findings presented in this paper are based on theoretical analysis, literature review, and other relevant scholarly resources. All references cited are available in the reference section for further examination.
References
S. Abbasbandy, Soliton solutions for the Fitzhugh-Nagumo equation with the homotopy analysis method, Applied Mathematical Modelling 32(12) (2008) 2706-2714.
K. Al–Khaled, Numerical study of Fisher’s reaction–diffusion equation by the sinc collocation method, Journal of Computational and Applied Mathematics 137 (2001) 245–255.
S. M. Allen, J. W. Cahn, A microscopic theory for antiphase boundary motion and its application to antiphase domain coarsening, Acta Metall. 27 (1979) 1085–1095.
W. T. Ang, A Beginners Course in Boundary Element Methods, Universal Publishers, Boca Raton, USA, 2007.
P. Alipour, The BEM and DRBEM schemes for the numerical solution of the two-dimensional time-fractional diffusion-wave equations, Authorea, Inc 2023.
G. Cao, B. Yu,L. Chen, W. Yao, Isogeometric dual reciprocity BEM for solving non-Fourier transient heat transfer problems in FGMs with uncertainty analysis, International Journal of Heat and Mass Transfer, 203, (2023) 123783.
B. Yu, G. Cao, S. Ren, Y. Gong, C. Dong, An isogeometric boundary element method for transient heat transfer problems in inhomogeneous materials and the non-iterative inversion of loads, Applied Thermal Engineering 212, (2022) 118600.
B. Yu, C. Geyong, G. Yanpeng, S. Ren, C. Dong. IG-DRBEM of three-dimensional transient heat conduction problems, Engineering Analysis with Boundary Elements, 128 (2021) 298-309.
B. Yu, G. Cao, Z. Meng, Y. Gong, C. Dong. Three–dimensional transient heat conduction problems in FGMs via IG–DRBEM, Computer Methods in Applied Mechanics and Engineering, 384 (2021) 113958.
B. Yu, G. Cao, W. Huo, H. Zhou, E. Atroshchenko. Isogeometric dual reciprocity boundary element method for solving transient heat conduction problems with heat sources, Journal of Computational and Applied Mathematics, 385 (2021) 113197.
B. Yu, H.L. Zhou, H.L. Chen, Y. Tong. Precise time-domain expanding dual reciprocity boundary element method for solving transient heat conduction problems, International Journal of Heat and Mass Transfer, 91 (2015) 110-118.
D. G. Aronson, H. F. Weinberger, Multidimensional nonlinear diffusion arising in population genetics, Adv. Math. 30 (1978) 33-76.
A. H. Bhrawy, A Jacobi-Gauss-Lobatto collocation method for solving generalized Fitzhugh–Nagumo equation with time–dependent coefficients, Applied Mathematics and Computation 222 (2013) 255–264.
C. Bozkaya, Boundary element method solution of initial and boundary value problems in fluid dynamics and magnetohydrodynamics, Ph.D Thesis, Technical University of Midell East, 2008.
C. A. Brebbia, D. Nardini, Dynamic analysis in solid mechanics by an alternative boundary element procedure, International Journal of Soil Dynamics and Earthquake Engineering 2 (1983), 228-233.
C. A. Brebbia, P. W. Partridge, L. C. Wrobel, The dual reciprocity boundary elements method, Computational Mechanics Publications: Southampton and Elsevier Applied Science: New York, 1992.
J.-W. Choi, H. G. Lee, D. Jeong, J. Kim, An unconditionally gradient stable numerical method for solving the Allen–Cahn equation, Physica A 388 (2009) 1791–1803.
M. Dehghan, F. Fakhar–Izadi, Pseudospectral methods for Nagumo equation, International Journal for Numerical Methods in Biomedical Engineering 27 (2011) 553–561.
M. Dehghan, A. Ghesmati, Solution of the second–order one–dimensional hyperbolic telegraph equation by using the dual reciprocity boundary integral equation (DRBIE) method, Engineering Analysis with Boundary Elements 34 (2010) 51–59.
M. Dehghan, A. Ghesmati, Application of the dual reciprocity boundary integral equation technique to solve the nonlinear Klein–Gordon equation, Computer Physics Communications 181 (2010) 1410–1418
M. Dehghan, D. Mirzaei, The boundary integral equation approach for numerical solution of the one–dimensional Sine–Gordon equation, Numerical Methods for Partial Differential Equations, 24 (2008) 1405–1415.
M. Dehghan, D. Mirzaei, A numerical method based on the boundary integral equation and dual reciprocity methods for one–dimensional Cahn–Hilliard equation, Engineering analysis with boundary elements 33 (2009) 522–528.
M. Dehghan, A. Shokri, Numerical solution of the nonlinear Klein–Gordon equation using radial basis functions, Journal of Computational and Applied Mathematics 230 (2009) 400–410.
M. Dehghan, M. Shirzadi, A meshless method based on the dual reciprocity method for one-dimensional stochastic partial differential equations, Numerical Methods for Partial Differential Equations 32 (2016) 292–306.
M. Dehghan, M. Shirzadi, The modified dual reciprocity boundary elements method and its application for solving stochastic partial differential equations, Engineering Analysis with Boundary Elements 58 (2015) 99–111.
X. Feng, A. Prohl, Numerical analysis of the Allen–Cahn equation and approximation for mean curvature flows, Numerische Mathematik 94 (2003) 33–65.
R. Fitzhugh, Impulse and physiological states in models of nerve membrane, Biophysics J 1 (1961) 445–466.
G. Hariharan, K. Kannan, Haar wavelet method for solving Cahn–Allen equation, Applied Mathematical Sciences, 3 (2009) 2523–2533.
G. Hariharan, K. Kannan, Haar wavelet method for solving FitzHugh–Nagumo equation, vol. 67, World Academy of Science, Engineering and Technology, 2010.
I. Dag, A. Sahin, A. Korkmaz, Numerical investigation of the solution of Fisher’s equation via the B-spline Galerkin method, Numerical Methods for Partial Differential Equations, 26 (2010) 1483–1503.
S. R. Karur, P. A. Ramachandran, Radial basis function approximation in dual reciprocity method, Mathematical and Computer Modelling 20 (1994) 59–70.
J. Katsikadelis, Boundary Element Methods, Theory and Application, Elsevier, 2002.
T. Kawahara, M. Tanaka, Interaction of travelling fronts: an exact solution of a nonlinear diffusion equation, Physics Letters A 97 (1983) 311–314.
P. K. Kythe, Fundamental Solution for Differential Operators and Application, Birkhauser, Boston, 1996.
H. Li, Y. Guo, New exact solutions to the Fitzhugh–Nagumo equation, Applied Mathematics and Computation 180 (2006) 524–528.
Y. Li, H. G. Lee, D. Jeong, J. Kim, An unconditionally stable hybrid numerical method for solving the Allen–Cahn equation, Computers & Mathematics with Applications 60 (2010) 1591–1606.
T. Mavoungou, Y. Cherruault, Numerical study of Fisher’s equation by Adomian’s method, Mathematical and computer modelling 19 (1994) 89–95.
R. E. Mickens, A best finite–difference scheme for the Fisher equation, Numerical Methods for Partial Differential Equations 10 (1994) 581-585.
R. C. Mittal, S. Kumar, Numerical study of Fisher’s equation by wavelet Galerkin method, International Journal of Computer Mathematics 83 (2006) 287–298.
R. C. Mittal, G. Arora, Efficient numerical solution of Fisher’s equation by using B–spline method, International Journal of Computer Mathematics 87 (2010) 3039–3051.
M. C. Nucci, P.A. Clarkson, The nonclassical method is more general than the direct method for symmetry reductions: an example of the Fitzhugh–Nagumo equation, Physics Letters A 164 (1992) 49–56.
J. S. Nagumo, S. Arimoto, S. Yoshizawa, An active pulse transmission line simulating nerve axon, Proceedings of the IRE 50 (1962) 2061–2071.
D. Olmos, B. D. Shizgal, A pseudospectral method of solution of Fisher’s equation, Journal of Computational and Applied Mathematics 193 (2006) 219–242.
C. Pozrikidis, A Practical Guide to Boundary Element Methods with the Software Library Bemlib, Chapman and Hall/CRC, 2002.
Y. Qiu, D. M. Sloan, Numerical solution of Fisher’s equation using a moving mesh method, Journal of Computational Physics 146 (1998) 726–746.
J. Roessler, H. Hussner, Numerical solution of the 1+2dimensional Fisher’s equation by finite element and the Galerkin method, Mathematical and Computer Modelling 25 (1997) 57–67.
M. Shih, E. Momoniat, F. M. Mahomed, Approximate conditional symmetries and approximate solutions of the perturbed Fitzhugh–Nagumo equation, Journal of mathematical physics 46 (2005) 023503.
A. Shirzadi, V. Sladek, J. Sladek, A local integral equation formulation to solve coupled nonlinear reaction–diffusion equations by using moving least square approximation, Engineering Analysis with Boundary Elements 37 (2013) 8–14.
A. Shiva, H. Adibi, A numerical solution for advection–diffusion equation using dual reciprocity method, Numerical Methods for Partial Differential Equations, 29 (2013) 843–856.
A. Shokri, M. Dehghan, A Not–a–Knot meshless method using radial basis functions and predictor–corrector scheme to the numerical solution of improved Boussinesq equation, Computer Physics Communications 181 (2010) 1990–2000.
S. Tang, R. O. Weber, Numerical study of Fisher’s equation by a Petrov–Galerkin finite element method, The ANZIAM Journal 33 (1991) 27–38.
H. Triki, A.–M. Wazwaz, On soliton solutions for the Fitzhugh–Nagumo equation with time–dependent coefficients, Applied Mathematical Modelling 37 (2013) 3821–3828.
R. A. Van Gorder, Gaussian waves in the Fitzhugh–Nagumo equation demonstrate one role of the auxiliar function \(H(x,t)\) in the homotopy analysis method, Communications in Nonlinear Science and Numerical Simulation 17 (2012) 1233–1240.
R. A. Van Gorder, K. Vajravelu, A variational formulation of the Nagumo reaction–diffusion equation and the Nagumo telegraph equation, Nonlinear Analysis: Real World Applications, 11 (2010) 2957–2962.
X. Y. Wang, Exact and explicit solitary wave solutions for the generalized Fisher equation, Physics letters A 131 (1988) 277–279.
A. M. Wazwaz, A. Gorguis, An analytic study of Fisher’s equation by using Adomian decomposition method, Applied Mathematics and Computation 154 (2004) 609–620.
A. M. Wazwaz, The tanh–coth method for solitons and kink solutions for nonlinear parabolic equations, Applied Mathematics and Computation 188 (2007) 1467–1475.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Alipour, P. THE DUAL RECIPROCITY BOUNDARY ELEMENT METHOD FOR ONE-DIMENSIONAL NONLINEAR PARABOLIC PARTIAL DIFFERENTIAL EQUATIONS. J Math Sci 280, 131–145 (2024). https://doi.org/10.1007/s10958-023-06642-4
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10958-023-06642-4