
Abstract
We analyze the optimal harvesting rule of a monopolist in a managed single-species fishery environment where we allow the fishery control to be imperfect. The monopolist’s control action consists of legal and illegal actions. Illegal actions might be detected at random times, in which case the monopolist is subject to a deterrence scheme in line with the Common Fishery Policy implemented by the European Union. We show that the introduction of the management policy, together with the inability of the regulator to perfectly monitor fishing activities, creates an incentive to harvest not only beyond the allowed quota, but also beyond the harvest in an unregulated but otherwise equal situation. This effect is particularly pronounced at lower levels of the legal quota. We also show that, if the monopolist is sufficiently impatient, over-harvesting with severe depletion of the resource might even occur under a reinforced deterrence scheme that considers the permanent withdrawal of the fishing license.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Real-world fisheries management practices draw on the principles and results of bioeconomics (see [1] for an extensive overview on the subject). Harvesting management is based on so-called harvest control rules (HCRs), typically defined by fixing targets or thresholds. Targets are levels of the stock size and/or of the fishing mortality rate, which includes harvesting, the regulator aims to obtain and maintain.Footnote 1 Thresholds are limit level of the stock size under which the resource is in danger of extinction.Footnote 2
Based on HCRs, control activities are all the set of rules for adjusting the harvesting rate over time on the basis of the (estimated) quantity of resource. Typically, harvesting control is given in terms of fishing effort, Total Allowable Catch (TAC) or quotas.
The enforcement of control rules has become necessary for the huge impact on the survival of fisheries of harmful harvesting activities such as the use of prohibited gears, the landing of undersized fish and, in general, what is referred to as Illegal, Unreported or Unregulated (IUU) fishing, see [3] for further discussions on the point.Footnote 3 For this purpose, from January 2010 the EU implemented new rules to fight IUU fishing, enforcing penalties proportionate to the values of illegal catch. EU Regulation No 404/2011 imposes that “EU countries must include in their legislation effective, proportionate and dissuasive sanctions, and ensure that the rules are respected.”Footnote 4 According to this regulation, EU countries introduced a point system for serious fisheries infringements.Footnote 5 This system imposes to suspend the vessel’s license for a given period if given infringements are detected.
From an economic perspective, a general framework for dealing with law enforcement and crime has been developed in the seminal work by [4]: individual agents decide whether or not to commit felonies and are assumed to disregard social and moral norms and to maximize their expected utility. On top of them, control authorities choose enforcement measures and punishment levels in order to maximize some measure of welfare. Becker’s approach has started a stream of economic research on crime, which has been quite extensively applied to real-world problems such as corporate crimes [5, 6], determination of fines and deterrents [7,8,9,10], and illegal harvesting. In the last vein, [11] analyzes harvesters’ behavior and optimal regulatory enforcement, [12] proposes a similar setup, where harvesters allot their time to either legal or illegal fishing, and employs it for an empirical study on Quebec landings. Relatedly, [13] considers both legal and illegal fishermen, who harvest at differentiated costs and sell the resource at the same price. For an extensive review on law enforcement literature applied to fisheries, we refer the interested reader to [14].
In our model, the fishery belongs to an owner, referred to as the Social Planner, who grants rights to accessing and harvesting a single resource to an authorized user, referred to as the Monopolist. The Social Planner, being in charge of protecting the resource, fixes the rules for harvesting (the HCRs) and imposes a set of penalties and sanctions to punish illegal catch. Following Becker’s viewpoint, the Monopolist’s action space consists of both legal and illegal catches. Illegal harvesting might be detected by the monitoring system implemented to inspect the fishing area. The Monopolist’s decision problem can be formulated as a piecewise optimal control problem where the different modes of the system describe situations in which the Monopolist’s illegalities have been detected a given number of times. Switches from one mode of the system to the other arrive at random times, depending on the Monopolist’s behavior and on the Social Planner’s effort in monitoring the fishery.
We analyze the optimal harvesting rules under two different deterrence schemes. The first one is a simplified representation of the sanctions imposed to illegalities under the European Common Fishery Policy. Every detected illegality under the policy is registered and, after a certain number of illegalities has been detected, the Monopolist is subject to a mandatory temporary withdrawal of the fishing license. In the second scheme, we impose that after a certain number of illegalities detected, the Monopolist loses permanently the right to harvest in the area. This second deterrence scheme implements a moratorium on exploitation, as imposed in 1992 by the Canadian Minister of Fisheries and Oceans to the Atlantic northwestern Cod fishery after the dramatic collapse of its biomass, see [15] for details.
We detect insights of practical relevance. We show that the introduction of these deterrence schemes makes the Monopolist willing to harvest beyond the level she would have chosen under an unregulated but otherwise equal fishery. In this case, over-harvesting compensates the Monopolist for the risk of the penalties imposed if illegal behavior is detected. Over-harvesting is even aggravated if the Social Planner sets a low catch level and does not enforce it properly. The second scheme might alleviate this distortion, but could be insufficient to prevent the collapse of the resource if the Monopolist is sufficiently aggressive.
The plan of the paper is as follows. The basic model with the two different deterrence schemes is introduced in Sect. 2. Section 3 discusses in details the numerical procedure we employed to approximate value functions. Section 4 explores the impact of the different deterrence schemes in a baseline fishery model. Section 5 evidences that the main results of the paper are still valid assuming that the probability of being convicted depends on the amount of illegal harvesting. Finally, Sect. 6 concludes.
2 The Model
Let us denote by \(x=x(t)\) the size of resource stock at time t and assume it follows the logistic model:
where \(q=q(t)\) denotes the quantity harvested. The parameter K measures the maximum potential population density (carrying capacity), while parameter r is the intrinsic growth rate of the population. The resource’s market price is determined through the following inverse demand function:
while marginal costs of harvesting depend on the current resource stock, through the following cost function:
Two agents are present in the market. The Social Planner, or he, is in charge of the long-run preservation of the resource and is endowed with the discount rate \(\rho \). The Monopolist, or she, has the exclusive right to harvest the resource, subject to limitation imposed by the Social Planner. She is endowed with the discount rate \(\omega \), and her maximum harvesting potential capacity is \(q_{\mathrm{max}}\). We assume \(\omega > \rho \) to highlight that the Monopolist is more interested in immediate profits and less interested in the long-run preservation of the resource than the Social Planner, as pointed out in [1]. The Social Planner’s goal is to stabilize the long-run amount of biomass to the equilibrium level that arises from the following optimal control problem:
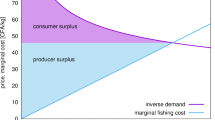
subject to (1) and \(q(t)\le q_{\mathrm{max}}\), where \(U(q) = \int _0^q p(s)\mathrm{d}s\) is the consumer surplus, which measures social utility [1]. The solution of (4), characterized in [1, 16], can be expressed in terms of the optimal equilibrium biomass \(x^e\), obtained through the so-called Modified Golden Rule as solution of the following equation:
with corresponding harvest rate \(q^e=f(x^e)\), and \(q^e\le q_{\mathrm{max}}\). Clark and Munro [16] and Clark [1] show that the optimal long-run pair \((x^e,q^e)\) is a saddle point and the optimal path to \((x^e,q^e)\) follows its stable manifold. The gradual approach to equilibrium along this manifold defines the feedback control \(q=q(x)\) the Social Planner employs to maximize the discounted stream of social utility over an infinite horizon.
The Social Planner distributes a fishing license to the Monopolist, giving permission to harvest the resource, and determines a Harvesting Control Rule (HCR) based on his bioeconomic target \(x^e\). In this paper, we focus on the simplest HCR, namely the Total Allowable Catches (TAC), which is the maximum amount of stock the Monopolist is allowed to harvest at any time, corresponding to the Social Planner’s equilibrium harvesting rate \(q^e\). Any harvest beyond \(q^e\) is considered illegal, and any detected illegality is convicted.
We introduce a discrete set \(I = \{0,1,2,\ldots ,m\}\); each element \(i\in I\) is a mode of the system and represents a situation where the Monopolist has been detected in committing illegalities and is allowed a specific action. We denote by \(\pi ^i(x,q)\) the instantaneous profit of the Monopolist in mode i and express the action allowed in mode \(i \in I\) as q(t)g(i), thus interpreting g(i) as the impact of the mode on the evolution of the resource.
Switches between modes of the system are driven by a Markov chain \(\xi (t)\), with values in I, which generates the information flow given by the family of \(\sigma -\)algebras \(\mathcal {F}(t)\). Such process is deterministic at any time, except at the random times \(\tau _1,\tau _2,\ldots \) where illegalities are detected. Randomness of \(\xi (t)\) reflects the inability of the Social Planner to detect all the illegalities. The driving force of this process is the instantaneous probability that any illegality will be detected. We assume that \(\xi (t)\) switches from one mode to another at the same intensity \(\lambda (x,q,q^e)\), referred to as the hazard rate. This assumption means that the probability of being convicted does not depend on the mode of the system, although generalizations in this direction are straightforward. Thus, the Monopolist maximizes the following objective functionals, one for each \(i\in I\):
subject to the following dynamic constraints:
where the set of admissible control paths and states are given by all \(\mathcal {F}(t)\)-adapted random processes q(t) and x(t) such that \(x(\cdot )\) is the unique solution of (7) and \(P\left[ 0 \le q(t) \le q_{\mathrm{max}}\right] =1\) for all t. Throughout the paper, we will look for stationary Markovian control policies. Using techniques in [17], it can be shown that the value functions, \(V(x,i)=\underset{q(\cdot )}{\sup }\;J(x,q(\cdot ),i)\), are the unique viscosity solution of the following system of Hamilton–Jacobi–Bellman (HJB) equations:
Next, we present the deterrence schemes considered in our analysis.
Temporary Punishment
Here we consider a deterrence scheme in the spirit of the dynamic deterrence theory developed in [8]. Every detected illegality is charged with a monetary fine \(\theta \). In addition, at the random time T where the illegality is detected, the Monopolist must stop harvesting for a period \(\tau \). At time \(T+\tau \), the Monopolist will restart harvesting, subject to the same regulatory control. This deterrence scheme can be easily represented with a system consisting of only two modes, that is \(I = \{0,1\}\): mode 0 means “illegality not detected,” whereas mode 1 means “illegality detected.” The value function in mode 1 can be written in terms of the value function in mode 0:
To see this point, suppose that at the time of conviction T the resource stock is at level x. Then, the resource evolves without harvesting for a period of time \(\tau \), following the logistic growth function, and thus at time \(T+\tau \) the new resource level is \(x_\tau = \frac{K x}{x + (K-x) \mathrm{e}^{-r \tau }}\). At the end of the period of conviction, the Monopolist faces the same problem starting at \(x_\tau \). Under this scheme, the HJB equation (9) specializes to:
Permanent Punishment
Every illegality detected is subject to a monetary fine and a period of forced stop from resource extraction. However, the Social Planner also fixes a maximum number of illegalities detected, after which the Monopolist loses the fishing license permanently. For the sake of simplicity, we restrict the mathematical formulation to the case where the maximum number of illegalities detected is two. Extension to L illegalities allowed is obvious and does not add anything different to the model. Consider the discrete set \(I = \{0,1,2\}\) and the function g defined by:
where \(I\!\!I_A\) stands for the indicator function of the set A. Elements of I describe the number of times the Monopolist has been detected in illegal behavior. Actions allowed to the Monopolist in each mode of the system are described by g(i)q(t). In mode 0, no illegality has been detected and the Monopolist appears irreproachable to the Social Planner. In mode 1, however, exactly 1 illegality has been detected and, after the fine has been paid and the period of conviction expired, she is candidate for a permanent withdrawal of the fishing license, a situation that will occur in mode 2 at the next illegality detected. The system of HJB equations solved by the value functions of the Monopolist now reads:
In the first equation of the system, the rationale of the previous deterrence scheme applies. However, now the value function in mode 1 does not coincide with that in mode 0, due to the different jumping condition specified by the deterrence scheme. The second equation, which characterizes the value function after the first conviction, takes into account that the next conviction will be punished not only with the monetary fine but also with the permanent withdrawal of the license, and thus, the successive value function will be identically zero.
3 Approximation of the Value Functions
We use a semi-Lagrangian approximation scheme to solve the system of HJB equations arising from our problem.Footnote 6 We split the time interval \([0,\infty )\) in a sequence of equidistant time steps, \(t_n\), \(n \in I\!\!N\) and call h the constant time lag \(h = t_{n+1}-t_n\). At each time of jump \(\tau _l\) of the continuous time Markov chain \(\xi (t)\) introduced in the previous section, we define \(N_l\) as the first time step after the \(l\text {th}\) jump. Accordingly, we approximate the flow x(t) by means of a discrete time recurrence \(x^h_n\), which is the solution of the following difference equation, with initial condition \(x^h_0=x\) (to simplify notation we suppress the dependence of \(x^h\) on the pair (x, q)):
Next, we approximate the conditional distribution of jump times as:
where \(P^h_{x,i}(q)\equiv P\left[ N_{l+1}-N_l \ge 1|N_1,\ldots ,N_{l-1};\xi (N_l)=i, x^h_n = x\right] \). Equation (13) approximates the conditional probability of not observing a jump in a time step of length h. We will also make use of the conditional probability that the process will jump from mode i to mode j in an analogous time step, which we approximate as:
Using (13), (14) and the previous definition of the flow \(x^h_n\), we can compute the discrete time version of the usual backward operator:
The continuous time optimal control is thus replaced by the following first-order discrete time approximation
for \( \; i\in I\), where we set the discount factor \(\beta = \mathrm{e}^{-\omega h}\). Camilli [20] shows that \(V^h(x,i)\) satisfies the following dynamic programming equation:
Finally, inserting (15) into (17) gives the discrete time infinite dimensional system of equations satisfied by the value functions \(V^h(x)\overset{\mathrm{def}}{=} \left\{ V^h(x,i):\; i \in I \right\} \)
where the dynamic programming operators \(\mathcal {N}_i(\cdot )\) are defined by:
In the second step of the semi-Lagrangian approximation scheme, we convert the infinite dimensional problem (18) into a set of finite dimensional equations. We partition the interval [0, K] where the state variable lies by introducing a grid \(\Gamma = \{x_k : k=1,\ldots , M\}\) and solve (18) only for \(x \in \Gamma \). Denoting with \(V_\Gamma ^h(i)\) the matrix defined by \(\bigl (V^h(x_k,i)\bigr ) : \;x_k \in \Gamma , \; i \in I\), we now look for the solution of the following system:
However, in order to make the scheme operative, we need a reconstruction procedure to approximate the values \(V^h(x_k+h G(x_k,\alpha ,i),i)\), since, in general, the points \(x_k+h G(x_k,\alpha ,i)\) do not coincide with points of \(\Gamma \). We use piecewise linear interpolation to reconstruct those values. While higher-order reconstruction techniques might improve accuracy of the numerical scheme, the choice of linear interpolation is motivated by the possibility, in fact the reality, that the value function is not sufficiently smooth to guarantee oscillation-free approximations.
4 Analysis
In what follows, we perform a set of numerical experiments to highlight our findings. We set the time step h to 0.2. Throughout the analysis, we use the following cost function of harvesting (see [21] for details):
where b is the catchability parameter related to the adopted harvesting technology and \(\alpha \in (0,1]\) measures the economies of scale. We use, as base case, the parameter values in Table 1. This setup is purposely constructed to make harvesting profitable, especially at high levels of fish stock. Our main objective is to show the consequences of the introduction of new deterrence schemes, and this is best highlighted when fishing is economically remunerative. Also, we have chosen high values of the marginal cost for effort \(C_E\) and low values of the interest rate \(\omega \). The former choice is to show that our results do not rely on low marginal costs. The latter choice is to show that the effect highlighted in the paper is present even when the Monopolist is sufficiently forward-looking. Finally, with this setup the constraint \(q(t)\le q_{\mathrm{max}}\) never binds. This implies overcapacity of our Monopolist, a phenomenon often observed in the fishery industry (see [22] for details).
By (5) under the interest rate \(\rho \), the Social Planner assesses an optimal equilibrium biomass \(x^e=5.51\) with corresponding equilibrium harvesting rate \(q^e = 0.62\). This value represents the TAC that should guarantee the convergence to \(x^e\) under the stock dynamics (1). As for the parameters of the deterrence scheme, the period of conviction is set to \(\tau =5\) months. To the detection of the illegality, it is associated a constant fine equal to \(\theta =0.1\). The fine includes the administrative expenses and the cost of the period of inactivity (for instance, harbor charges during the period of conviction) and is paid as a lump sum right at the moment of detection of the illegality. Finally, we specify the functional form of the hazard rate as \( \lambda I\!\!I_{q>q^e}\), and we interpret \(\lambda \) as the Social Planner’s pressure on the Monopolist. This functional form implies that the probability of being convicted only depends on whether the Monopolist harvests legally or illegally. In other words, looking at the Monopolist’s risk of being convicted, it only matters to behave legally or illegally, whereas the extent of the illegality is irrelevant. We use this specification of the hazard rate mainly for expository purposes. The issue of robustness of our results with respect to different hazard rates is postponed in Sect. 5.

Optimal Markovian control. Blue (dash-dotted) curve: unregulated fishery; black (solid) curve: regulated fishery with \(q^e=0.62\) and \(\lambda = 0.9\); green (dotted) curve: natural growth. Monopolist’s continuously compounded interest rate is \(\omega = 0.05\). \(x^e_M\) is the unique stable optimal equilibrium biomass in the unregulated market and \(x^e\) the optimal resource level for the Social Planner. The purple bullet identifies \(x^*\), the boundary of the basin of attraction of \(x^e_M\)
We start our analysis by looking at a typical optimal strategy under managed harvesting and imperfect fishery control. In Fig. 1, together with the optimal control of problem (6), we plot the optimal control in the unregulated market, with the corresponding equilibrium level \(x_M^e=4.75\). In the regulated market, we identify a discontinuity in the policy function that we call legal threshold and denote by \(x^d(q^e,\lambda )\). When stock levels are below this legal threshold, the Monopolist finds optimal to harvest below the imposed TAC \(q^e\). However, any stock value above \(x^d(q^e,\lambda )\) creates an incentive to harvest not only beyond the TAC, but also beyond the optimal harvest in an unregulated but otherwise equal situation. We call this behavior the over-harvesting effect: under imperfect monitoring, the Monopolist may exploit situations of high profitability of fishing, due to high levels of stock, by increasing harvesting to compensate for the potential loss of incurring in sanctions. The economic intuition behind this effect is best highlighted by looking at the discrete time approximation (17). The optimization problem involves comparison of two alternatives. The first corresponds to following the rules, thus restricting the Monopolist’s reward opportunity by that possible with the legal catch. The second alternative is to break the rules by harvesting \(q > q^e\), thus making a riskless profit \(h \pi (x,q)\) and engaging in the risky affair consisting of not being detected with some probability and incurring in the sanction with the complementary probability. For levels of the stock above the legal threshold, the risk involved is evidently compensated by the larger instantaneous profit the Monopolist makes by choosing the harvesting well above the TAC. The additional harvesting beyond the optimal level in an unregulated market has also a significant economic intuition. Under managed fishery, the continuation value is actually an expected continuation value lower than the continuation value in an unregulated market. This pushes the Monopolist to seek for an extra reward. The additional harvesting reflects the premium she requires to compensate the risk of the potential loss of incurring in the sanctions.
We continue our analysis by looking at how the presence of the legal threshold impacts on the controlled dynamical system (1). The simplicity of the model allows us to analyze the dynamics by a simple comparison on the same Cartesian plane of the optimal feedback harvesting rule and the natural growth function. According to the fixed TAC, the Social Planner would expect the convergence to the biomass equilibrium level \(x^e\). However, this convergence does not occur because the Monopolist finds convenient to harvest illegally for higher levels of the resource stock. This is clearly visible in Fig. 1, where two distinct attractors are shown: the Monopolist’s optimal equilibrium biomass \(x^e_M\) and the legal threshold \(x^d(q^e,\lambda )\). The equilibrium \(x^*\), (lower) intersection between the TAC \(q^e\) and the natural growth function, acts, indeed, as the boundary of the basins of attraction of the two attractors. The long-run convergence to the equilibrium \(x^e_M\), occurring when the initial resource level is sufficiently low, is brought about by the Monopolist’s feedback control when illegalities are not committed. However, we also find a phenomenon known as sliding motion for initial states beyond the boundary, [23, 24]. To gain intuition, suppose the initial state is at the right of the legal threshold \(x^d(q^e,\lambda )\). At this level, the Monopolist finds profitable to fish illegally and this causes a rapid decline of the resource level. As the resource decreases, so does the incentive to fish above the TAC, until fishing illegally is not profitable anymore and the Monopolist will harvest exactly at the TAC. In this new situation, however, the natural growth function is above the harvesting, and the resource level increases again, until over-harvesting is again profitable. The sliding motion is then this cyclic behavior characterized by legal–illegal harvesting switches at high frequency. This induces a so fast oscillatory behavior that the density of the exploited population remains practically constant at the threshold value, a property denoted as Zeno, [25, 26].Footnote 7
Sensitivity Analysis
In this section, we investigate how the Social Planner’s choice of both the TAC and the hazard rate affects: (i) the position of the legal threshold; (ii) the incentive to over-harvest and (iii) the global dynamics of the system. We find that a higher \(\lambda \) implies a higher legal threshold, thus over-harvesting only at higher levels of the state variable. This is clearly understood: the Social Planner, by increasing the effort in enforcing the rules, weakens the incentive to harvest beyond the TAC, since the risk to be detected increases with \(\lambda \). The reduction in \(q^e\) has counter-intuitive consequences. A lower TAC enlarges the region of over-harvesting. This is highlighted in Fig. 2a where we plot the legal threshold \(x^d(q^e,\lambda )\) as function of the TAC for different levels of the Social Planner’s monitoring effort. The figure shows an increasing and convex relationship between the TAC \(q^e\) and the legal threshold \(x^d(q^e,\lambda )\), implying over-harvesting at lower stock levels. We identify this phenomenon as the impatience effect. A lower TAC decreases the profits the Monopolist can attain under legality, while a higher \(\lambda \) reduces the incentive to over-harvest by decreasing the expected illegal profits. In other words, at lower TACs the Social Planner creates a disincentive to harvest legally, since at those levels the Monopolist is losing too much. This makes the Monopolist more impatient to over-harvest with a consequent shift of the legal threshold toward left. The first immediate consequence of the impatience effect is in terms of dynamics. The legal threshold shows an increasing relationship with the TAC, implying that the lower the TAC, the lower the long-run level of the resource. This shows that incautious choices of the TAC, if not accompanied by proper sustain to legal harvest or by adequate reinforcement of the control, might not only miss the desired benefits, but also deplete the resource in the long run.

a Legal threshold as a function of \(q^e\) for various levels the intensity monitoring effort of \(\lambda \). b Legal threshold elasticity \(\phi (q^e;\lambda )\) as a function of the legal quota \(q^e\) for various levels of \(\lambda \) with \(\epsilon =0.1\)
The second consequence of the impatience effect is in terms of the regulatory effort a lower TAC requires. Our analysis shows that the incentive to over-harvest may exist, but it can be in principle completely removed by a sufficiently high Social Planner’s effort in enforcing the rules. In other words, there exists a level of \(\lambda \) beyond which the Monopolist always finds convenient to harvest legally. However, we want to emphasize that such a level of effort strongly depends on the TAC. More specifically, while it is true that a higher monitoring effort reduces the over-harvesting incentive by increasing the risk for the Monopolist to be detected, the magnitude of this reduction (measured in terms of increase of the legal threshold) is lower at lower levels of \(q^e\). To highlight this phenomenon, we plot in Fig. 2b the legal threshold sensitivities \(\phi (q^e;\lambda ) = \frac{x^d(q^e{\!},\lambda +\epsilon ) - x^d(q^e,\lambda )}{\epsilon }\), which measure the absolute change in the legal threshold with respect to a small increment of the monitoring effort. Again, the relationship between the sensitivities and the TAC is increasing and convex, reflecting the fact that higher levels of TAC are more easily enforced.
4.1 The Modified Deterrence Scheme
Under the modified deterrence scheme, the Monopolist faces a different problem for each mode of the system. Mode 2 is the situation in which the Monopolist has lost permanently the license and is thus forced to stop harvesting. Mode 1 describes the situation in which she harvests by knowing that at the next illegality detected she will permanently lose the license. Mode 0 describes an intermediate situation where the Monopolist knows that punishment for the next illegality detected will be mode 1.

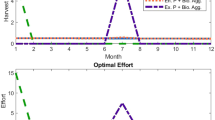
Resource dynamics under the modified deterrence scheme with an aggressive Monopolist. Here we set \(q^e = 0.62\), \(\lambda = 0.9\) and Monopolist’s continuously compounded interest rate \(\omega = 0.2\). a Feedback control in mode 0. b Two different trajectories of the whole system starting at \(x_0=5\)
The optimal catch rule of the Monopolist in mode 0 possesses the same qualitative features of the optimal harvesting under the baseline scheme. The dynamical implications are however different, since, not surprisingly, mode 1 optimal harvesting policy requires the Monopolist to catch legally. The overall result is the convergence of the resource level toward the highest equilibrium level at which the TAC intersects the natural growth function in the state-control space, which is the Social Planner’s target \(x^e\) already depicted in Fig. 1.
While the modified deterrence scheme may actually alleviate the damages due to the combination of over-harvesting with the impatience effect, we now show that this new scheme is far to be the panacea. For this purpose, we fix the Monopolist’s continuously compounded interest rate to \(\omega =0.2\), keeping equal all the other parameters. Here, our purpose is to show that the system of sanctions should be tailored on the specific situation at hands. In the proposed example, the Monopolist is very aggressive, due to the fact that she does not care that much about future revenues. Absent regulatory frictions, or under the baseline deterrence scheme of the previous section, this scenario leads to the long-run equilibrium level \(x^e_M\) depicted in Fig. 3a. The long-run outcome of the system under the modified deterrence scheme displays two possible outcomes: either convergence to equilibrium \(x^e_M\) of Fig. 3a or to the Social Planner’s target \(x^e\) of Fig. 1. This depends on whether the starting value of the resource in mode 1 is below or above the point \(x^*\), which constitutes the boundary of the basins of attraction of the two attractors. The starting value in mode 1, however, depends on the random time of conviction in mode 0. To highlight the implications, we plot in Fig. 3b two trajectories of the dynamical system starting at \(x_0=5\). In the first, the switch from mode 0 to mode 1 arrives at a time when the resource level is below \(x^*\). However, the 5-month period of conviction is sufficient for the resource to recover at a level above \(x^*\), just enough to avoid convergence to the very low equilibrium level \(x_M^e\). In the second trajectory, the first time of detection of the illegality arrives at a time when the resource level is below \(x^*\), and the period of conviction is not sufficiently long to let the resource recover to a level required to reach the highest equilibrium \(x^e\).
5 Robustness Check
In this section, we cope with the issue of assessing the robustness of our results with respect to the specification of the functional form of the hazard rate. Consider a hazard rate of the following form:
This specification embraces different situations. The parameter \(\nu \) controls the sign of convexity of \(\lambda (q,q^e)\). Loosely speaking, \(\nu <1\) (\(\nu >1\)) refers to a situation in which the increase of the detection rate is more pronounced at low (high) levels of illegal harvesting; in the case \(\nu = 1\), the marginal hazard rate is constant with respect to \(\kappa \). Obviously, when \(\kappa =0\) the previously considered case of constant hazard rate is retrieved. Our main concern is to show that the discontinuity of the Monopolist’s optimal catch rule as well as its consequences in terms of resource dynamics still hold for different specification of the hazard rate. In this respect, we found that the legal threshold exists as far as \(\lambda >0\). When \(\lambda = 0\), we recover a continuous optimal policy function.
We present a selected sample of results of our experiments, based on the same bioeconomic setup of Sect. 4, with an associated interest rate \(\omega =0.05\).Footnote 8 First, let us fix the detection parameters to \(\lambda =1\), \(\nu = 1\), and \(\kappa =1\). Figure 4a depicts the optimal harvesting rules for three different levels of the TAC. The optimal control rules are discontinuous, confirming that over-harvesting is still profitable, despite the increased risk of detection of illegalities, especially at higher levels of catch. This also confirms the impatience effect, which makes over-harvesting stronger at lower TACs, due to the larger loss in profits a lower TAC implies. Figure 4a sheds light on the economic mechanism behind over-harvesting. In fact, the incentive to harvest illegally arises from the joint effect of the imperfect monitoring system and the loss in profits due to a low TAC. In this sense, enforcing the catch limits through a deterrence scheme might be not enough to achieve the desired outcome. Rather, it might be necessary to introduce a system of incentives to catch legally, for instance through economic subsidies in periods when lower TACs are fixed, to limit the losses in profits.

a Monopolist’s optimal catch rules for different level of the TAC. Black (solid) line: \(q^e=0.62\); blue (dotted) line: \(q^e=0.4\); red (dash-dotted) line: \(q^e=0.3\). The deterrence parameters are: \(\lambda =1\), \(\nu = 1\) and \(\kappa = 1\). The bioeconomic parameters are those in Table 1. b Legal threshold as function of \(\kappa \) for different values of the concavity parameter \(\nu \), \(\lambda =1\) and TAC set to \(q^e=0.62\). The bioeconomic parameters are those in Table 1
Second, we assess the influence of parameters \(\kappa \) and \(\nu \) on the legal threshold, which we now denote by \(x^d(q^e,\lambda ,\kappa ,\nu )\). Here the aim is to show that the optimal policy rules are still discontinuous for a wide range of parameters. Figure 4b plots the legal threshold as function of \(\kappa \) for different levels of the concavity parameters \(\nu \). The figure also shows how the sign of convexity of the hazard rate affects the position of the discontinuity threshold. Not surprisingly, the legal threshold is more easily pushed forward when the hazard rate is concave.
6 Conclusions
In a greatly simplified world, this paper shows that a not-so-well-designed management scheme might create incentives for illegal behavior that would greatly harm the resource. Our analysis highlights the need to go a step further in harvesting management, including into the policy design also the economic effects of the deterrence scheme. In this respect, we view this paper as a first step in this direction, showing that a good policy design needs a proper balance between deterrence, incentive to legal behavior and effort in enforcing the law.
Notes
The most common kind of target is the Maximum Sustainable Yield (MSY), defined as the largest average catch that can be continuously taken from a stock under existing environmental conditions. In 2002, during the Earth Summit, the EU member States committed themselves to “maintain or restore stocks to levels that produce the MSY with the aim of achieving these goals for depleted stocks on an urgent basis and where possible not later than 2015.” The European Common Fishery Policy (CFP) is based on achieving the MSY in most fisheries, as stated in the Green paper on the reform of the CFP, see http://ec.europa.eu/fisheries/reform/index_en.htm, last accessed on 29/11/2017.
One important example is the so-called management by reference points, which is commonly applied in many North American fisheries. For example, the 40–10 harvest control rule of the Pacific Coast Groundfish Fishery Management Plan (PCGFMP) imposes constant harvesting when biomass is above 40% of the virgin stock size, a progressive reduction in fishing effort when the biomass is between 10 and 40% and the closure of the fishery when biomass is below 10%, see [2] for an overview on HCRs and related real-world examples.
In 2013, it was estimated that illegal fishing represents between $10 billion to $23 billion in global losses each year, see: http://www.huffingtonpost.com/2013/05/08/illegal-fishing-fish-piracy-seafood_n_3234434.html, last accessed on 29/11/2017.
See the implementation of Council Regulation (EC) No 1224/2009 establishing a Community control system for ensuring compliance with the rules of the Common Fisheries Policy, available at http://eur-lex.europa.eu/legal-content/EN/ALL/?uri=CELEX:32009R1224, last accessed on 29/11/2017.
See http://ec.europa.eu/fisheries/cfp/control/infringements_sanctions/index_en.htm, last accessed on 29/11/2017.
In other words, an infinity of legal–illegal decisions takes place in a finite amount of time. As it is difficult for this to happen in reality, our model could be generalized following [27]. This involves considering the harvesting rate as a state variable and penalizing changes in effort in the objective function by introducing adjustment costs. We acknowledge an anonymous reviewer for pointing out such an extension.
We have performed a series of robustness check on various bioeconomic setups, all confirming our main findings, but we do not report the results in the paper for the sake of brevity.
References
Clark, C.W.: Mathematical Bioeconomics: The Mathematics of Conservation, 3rd edn. Wiley, London (2010)
Apostolaki, P., Hillary, R.: Harvest control rules in the context of fishery-independent management of fish stocks. Aquat. Living Resour. 22(2), 217–224 (2009)
Sumaila, U., Alder, J., Keith, H.: Global scope and economics of illegal fishing. Mar. Policy 30(6), 696–703 (2006)
Becker, G.: Crime and punishment: an economic approach. J. Political Econ. 76, 169–217 (1968)
Leung, S.: How to make the fine fit the corporate crime? An analysis of static and dynamic optimal punishment theories. J. Public Econ. 45, 243–256 (1991)
Motchenkova, E., Kort, P.: Analysis of current penalty schemes for violations of antitrust laws. J. Optim. Theory Appl. 128(2), 431–451 (2006)
Polinsky, A., Shavell, S.: The optimal tradeoff between the probability and magnitude of fines. Am. Econ. Rev. 69, 880–891 (1979)
Leung, S.: Dynamic deterrence theory. Economica 62, 65–87 (1995)
Garoupa, N.: The theory of optimal law enforcement. J. Econ. Surv. 11, 267–295 (1997)
Garoupa, N.: Optimal magnitude and probability of fines. Eur. Econ. Rev. 45, 1765–1771 (2001)
Sutinen, J., Andersen, P.: The economics of fisheries law enforcement. Land Econ. 61, 387–397 (1985)
Furlong, W.: The deterrent effect of regulatory enforcement in the fishery. Land Econ. 67(1), 116–129 (1991)
Milliman, S.: Optimal fishery management in the presence of illegal activity. J. Environ. Econ. Manag. 13(4), 363–381 (1986)
Nøstbakken, L.: Fisheries law enforcement—a survey of the economic literature. Mar. Policy 32(3), 293–300 (2008)
Frank, K., Petrie, B., Fisher, J., Leggett, W.: Transient dynamics of an altered large marine ecosystem. Nature 477(7362), 86–89 (2011)
Clark, C., Munro, G.: The economics of fishing and modern capital theory: a simplified approach. J. Environ. Econ. Manag. 2, 92–106 (1975)
Fleming, W., Soner, H.: Controlled Markov Processes and Viscosity Solutions. Springer, Berlin (2006)
Grüne, L., Semmler, W.: Using dynamic programming with adaptive grid scheme for optimal control problems in economics. J. Econ. Dyn. Control 28, 2427–2456 (2004)
Santos, M.S., Vigo-Aguiar, J.: Analysis of a numerical dynamic programming algorithm applied to economic models. Econometrica 66(2), 409–426 (1998)
Camilli, F.: Approximation of integro-differential equations associated with piecewise deterministic process. Optim. Control Appl. Methods 18, 423–444 (1997)
Bischi, G., Lamantia, F., Radi, D.: Multispecies exploitation with evolutionary switching of harvesting strategies. Nat. Resour. Model. 26(4), 546–571 (2013)
Clark, C.W.: The Worldwide Crisis in Fisheries. Cambridge University Press, Cambridge (2007)
Utkin, V.: Variable structure systems with sliding modes. IEEE Trans. Autom. Control AC 22, 212–222 (1977)
Filippov, A.: Differential Equations with Discontinuous Righthand Sides. Kluwer, Dordrecht (1988)
Di Bernardo, M., Budd, C., Champneys, A., Kowalczyk, P.: Piecewise-Smooth Dynamical Systems: Theory and Applications. Springer, Berlin (2008)
Bischi, G., Lamantia, F., Tramontana, F.: Sliding and oscillations in fisheries with on-off harvesting and different switching times. Commun. Nonlinear Sci. Numer. Simul. 19, 216–219 (2014)
Jørgensen, S., Kort, P.M.: Optimal dynamic investment policies under concave–convex adjustment costs. J. Econ. Dyn. Control 17(1), 153–180 (1993)
Acknowledgements
The authors wish to thank the Editors and the anonymous Reviewers for insightful comments and suggestions. The usual disclaimer applies.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
De Giovanni, D., Lamantia, F. Dynamic Harvesting Under Imperfect Catch Control. J Optim Theory Appl 176, 252–267 (2018). https://doi.org/10.1007/s10957-017-1208-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10957-017-1208-y