
Abstract
The magnetic levitation force (MLF) and the guidance force (GF) should be improved for loading capacity and stability of Maglev systems, respectively. Although there are some ways to increase these properties, using of auxiliary onboard permanent magnets (PMs) can be considered as the most efficient one. The auxiliary PMs increase the MLF significantly but, at the same time, decrease the GF. We have searched a solution to overcome this problem in this study. Firstly, we have determined the optimum vertical positions of the auxiliary PMs and then we have investigated the vertical levitation force and lateral guidance force of hybrid Maglev system depending on lateral position of auxiliary PMs in different cooling heights (CHs). A cylindrical YBCO superconductor, fabricated by a top seeding method with the diameter of 45 mm and the height of 15 mm, was used as a high-temperature superconductor (HTS). The maximum increment rate in MLF and the minimum decrement rate in GF were observed as 277 and 54 %, respectively. The increment in MLF was obtained five times more than the decrement in GF, and this reality points out that the results of this study can be useful for improving the loading capacity and thus enhancing the practical applicability of Maglev systems.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
High-temperature superconducting Maglev transportation has been a very important research item in recent years, and many research groups [1, 2] are working on these systems to increase the magnetic force performance. The magnetic levitation force (MLF) and guidance force (GF) of Maglev systems should be increased for achieving desired loading capacity and stability, respectively. The magnetic force performance of Maglev systems can be increased in three ways. The first way is to enhance the superconducting properties of the onboard superconducting material [3, 4]. The second way is based on the optimization of the permanent magnetic guideway (PMG) under a high-temperature superconductor (HTS) unit. The third way is using auxiliary onboard permanent magnets (PMs) [5, 6], and this system is called as a hybrid Maglev system.
There are lots of studies in the literature related to increasing the magnetic force properties of Maglev systems [7, 8]. Most of these studies focus on optimizing the PMG arrays below a HTS unit and comparing the conventional PMG and Halbach PMG [9, 10]. Although in respect to a scientific basis some enhancement has been reported in these papers, the magnetic force properties of Maglev systems should be increased for technological applicability.
It is possible to increase the magnetic force properties of Maglev systems by using big-sized HTSs, but there is a limitation for the size of the HTS. On the other hand, the HTS number can be increased, but this time, the production cost will be increased too much. So, the efficiency and the practical applicability of the system will be decreased. The hybrid Maglev systems can overcome this problem. In these systems, the auxiliary PMs are used as an onboard unit with HTSs together. Thus, the MLF and the efficiency of the system increase significantly due to the repulsive magnetic force of the parallel directional PMs [12]. However, the repulsive character of the auxiliary PMs decreases the guidance force and the stability of the system [5].
In this study, we aimed to increase the levitation force and to compensate the decrement in guidance force. For this aim, firstly, we have determined the optimum vertical positions of the auxiliary PMs and then we have investigated the vertical levitation force and lateral guidance force of the hybrid Maglev system depending on the lateral position of auxiliary PMs in different cooling heights (CHs).
2 Experimental Procedure
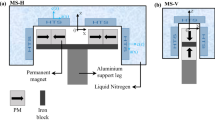
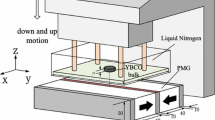
The magnetic force measurements in this study were done by using a three-axis magnetic force measurement system [11]. The system can measure the force between YBCO HTS and PMG in x-, y-, and z-axes up to 1110, 1110, and 2220 N, with the sensitivity of 0.5, 0.5, and 1 N, respectively. The single-domain cylindrical bulk YBCO superconductor, fabricated by a top seeding method with the diameter of 45 mm and the height of 15 mm, was provided by the ATZ GmbH.
Figure 1 shows the schematic view of the studied PMG. The arrows represent the magnetization direction of the PMs. The dimensions and surface magnetic flux densities of PMs are 40 mm × 30 mm × 30 mm and 40 mm × 20 mm × 20 mm and 0.53 and 0.50 T, respectively. Auxiliary onboard PM dimensions and magnetic flux densities are also 40 mm × 20 mm × 20 mm and 0.50 T, respectively. In this study, firstly, the vertical positions of the onboard auxiliary PMs (Z PM) were changed as 5, 10, 15, 20, and 25 mm to determine the optimum Z PM. Then, the lateral positions of the onboard auxiliary PMs (X PM) were changed as ± 2.5 and ± 5 mm as shown in Fig. 1, and the levitation force and the guidance force were investigated in different CHs. The MLF measurements were done in CHs of 5, 20, and 75 mm (zero-field-cooled (ZFC)), while the GF measurements were done in CHs of 5, 10, and 15 mm at the working height (WH) of 10 mm. The detailed measurement procedures can be found in our previous study [5].

Schematic view of the studied PMG for different XPM positions
3 Results and Discussion
The levitation force as a function of vertical distance between the HTS unit and the PMGs for different Z PM positions in CH = 5 mm and CH = 75 mm (ZFC) is shown in Fig. 2. As shown in this figure, the magnetic levitation force increases significantly both in CH = 5 mm and ZFC by using onboard auxiliary PMs. This increment is attributed to the repulsive character of the parallel magnetic dipoles [12]. It is also seen from the figure that the maximum levitation forces decrease with increasing vertical positions of auxiliary PMs. One can see that the attractive part of the levitation force curves in Fig. 2a disappeared by using the auxiliary PMs. This is because the repulsive force between PMG and auxiliary PMs reduces the attractive force between YBCO and PMG that comes from the flux trapping character of HTS.

Levitation force comparisons for different vertical positions of auxiliary onboard PMs in a CH = 5 mm and b CH = 75 mm (ZFC)
Figure 3 shows the guidance force as a function of the lateral distance between the HTS unit and the PMGs for different Z PM positions in CH = 5 mm and CH = 15 mm at WH = 10 mm. As known, the guidance force appears against the lateral movement of the system and the negative values of this force refer to the stability of the system. One can see from Fig. 3 that in CH = 5 mm, the system is stable for no onboard PM, Z PM = 25 mm, Z PM = 20 mm and Z PM = 15 mm, while in CH = 15 mm the system is stable for no onboard PM, Z PM = 25 mm and Z PM = 20 mm. It is known that the parallel magnetic dipoles repel each other and thus a repulsive force appears; however when the superconductors move laterally from initial positions an attractive force appears. The instability that appears for the closer positions of the auxiliary PMs to the PMG can be attributed to the suppression of attractive force by the repulsive force.

Guidance force comparisons for different vertical positions of auxiliary onboard PMs in a CH = 5 mm and b CH = 15 mm
The maximum values of levitation forces at the minimum gap of 5 mm and the guidance forces at WH = 5 mm are shown in Table 1. The maximum MLF values increased significantly by using auxiliary PMs, as shown in Table 1. The MLF increased at a rate of 234 % in CH = 5 mm and 45 % in ZFC, while the GF decreased at a rate of 48 % in CH = 5 mm and 73 % in CH = 15 mm for Z PM = 25 mm, in comparison to noonboard PM situation. Similarly, the MLF increased at a rate of 317 % in CH = 5 mm and 76 % in ZFC while the GF decreased at a rate of 63 % in CH = 5 mm and 91 % in CH = 15 mm for Z PM = 20 mm. Since the GF is very low and the system is unstable for Z PM = 15 mm and lower vertical positions of auxiliary onboard PMs, the optimum vertical positions of auxiliary PMs were determined as Z PM = 20 mm and the optimum lateral positions of auxiliary PMs were investigated.
Figure 4 shows the levitation force as a function of the vertical distance between the HTS unit and the PMGs for different X PM positions in CH = 5 mm, CH = 20 mm, and CH = 75 mm (ZFC). It is clear in this figure that in CH = 5 mm and ZFC regime, the levitation force decreases when X PM increases; namely, the auxiliary PMs move laterally from initial positions. It is also seen from the figure that the attractive part and the hysteresis of the levitation force curves decrease by using auxiliary onboard PMs. The decrement of levitation forces with increasing X PM can be attributed to the fact that the force between the parallel magnetic dipoles decreases with an increasing distance between the dipoles according to the inverse fourth power law [12]. The magnetic stiffness figures are shown in the inset of Fig. 4. It is seen in these insets that the magnetic stiffness values increase by using auxiliary onboard PMs as consistent with the levitation force values. On the other hand, the stiffness values do not change significantly with the lateral positions of auxiliary PMs. This can be attributed that the changing of the auxiliary PMs’ lateral position is not big enough to make a difference on stiffness values.

Levitation force comparisons for different lateral positions of auxiliary onboard PMs in a CH = 5 mm, b CH = 20 mm, and c CH = 75 mm (ZFC). Insets show related vertical stiffness graphs
The guidance force as a function of the lateral distance between the HTS unit and the PMGs for different X PM positions is shown in Fig. 5. One can see from this figure that the guidance force decreases by using onboard auxiliary PMs. On the other hand, by comparing the arrangements, it is seen that the auxiliary PMs in an onboard unit enhance GF values, when the auxiliary PMs move away from their initial positions. This can be understood by considering Figs. 4 and 5 together. When the auxiliary PMs move away from their initial positions, the levitation force decreases depending on the decrement of additional repulsive force, which comes from onboard auxiliary PMs, as shown in Fig. 4. Similarly, as shown in Fig. 5, the guidance force values increase with increasing X PM because of decreasing repulsive force. The insets in Fig. 5 show the lateral stiffness as a function of the lateral distance for different X PM positions. It can be seen in these insets that the lateral stiffness values decrease by using auxiliary PMs, as consistent with the guidance force values.

Guidance force comparisons for different lateral positions of auxiliary onboard PMs in a CH = 5 mm, b CH = 10 mm, and c CH = 15 mm. Insets show related vertical stiffness graphs
Table 2 shows the maximum levitation and guidance force values corresponding to different lateral positions of the auxiliary PMs. As can be seen in the table, the maximum MLF values were obtained at the lateral positions of auxiliary PMs: X PM = 0 mm in CH = 5 mm and ZFC while X PM = ± 2.5 mm in CH = 20 mm. For the arrangements including auxiliary PMs, the maximum GF values were obtained at X PM = ± 2.5 mm in CH = 5 mm and at X PM = ± 5 mm in CH = 10 mm and CH = 15 mm. The MLF increased at a rate of 277, 77, and 57 %, respectively, in CH = 5 mm, CH = 20 mm, and ZFC by using auxiliary PMs at the lateral positions of X PM = ± 2.5 mm. However, the GF decreased at a rate of 54, 66, and 82 % for the same lateral positions of auxiliary PMs in CH = 5 mm, CH = 10 mm, and CH = 15 mm, respectively. It is also seen in Table 2 that the increment rate in MLF is five times more than the decrement rate in GF. The ratios of the percentage MLF increment to the percentage GF decrement were obtained as 5.04, 5.12, and 4.57 at X PM = 0 mm, X PM = ± 2.5 mm, and X PM = ± 5 mm, respectively. One can see that it will be useful to use auxiliary PMs at Z PM = 20 mm and X PM = ± 2.5 mm for increasing the loading capacity and stability of Maglev systems.
4 Conclusions
The magnetic levitation and guidance forces between Halbach PMG and cylindrical YBCO HTS were investigated depending on the different vertical and lateral positions of auxiliary onboard PMs. It was clearly seen in this study that the MLF values increased significantly by using auxiliary PMs. However, the GF values decreased due to the repulsive force between auxiliary PMs and Halbach PMG. We have changed the vertical and lateral positions of auxiliary PMs to increase MLF and to compensate the decrement in GF. The maximum increment rate in MLF and the minimum decrement rate in GF were observed as 277 and 54 %, respectively. By considering the increment in MLF and the decrement in GF together, it is seen that the ratios of the maximum percentage MLF increment to the minimum percentage GF decrement were obtained as 5.04, 5.12, and 4.57 at X PM = 0 mm, X PM = ± 2.5 mm, and X PM = ± 5 mm, respectively. From these results, it can be concluded that using the cylindrical YBCO with auxiliary PMs in Maglev systems can enhance the loading capacity with a reasonable decrement in stability. It is believed that this study can be an effective reference for increasing the practical applications of Maglev systems.
References
Mattos, L.S., Rodriguez, E., Costa, F., Sotelo, G.G, de Andrade, R., Stephan, R.M.: MagLev-Cobra operational tests. IEEE Trans. Appl. Supercond. 26(3), 3600704 (2016)
Jiang, D.H., Wang, J.S., Ma, G.T., Xu, Y.Y., Lin, X.Q., Zheng, J., Wang, S.Y.: Levitation force for evaluation of the high temperature superconducting maglev vehicle under derailment. IEEE Trans. Appl. Supercond. 22(3), 3600304 (2012)
Abdioglu, M., Ozturk, K., Kutuk, S., Bolat, S., Yanmaz, E.: Effect of magnetic flux distribution and magnetic powder addition on the magnetic levitation force of Sm123 superconductors. J. Supercond. Nov. Magn 25, 923–929 (2012)
Erdem, O., Yanmaz, E.: Effect of Er doping on the superconducting properties of porous MgB2. Bull. Mater. Sci. 38(1), 89–93 (2015)
Ozturk, K., Kabaer, M., Abdioglu, M.: Effect of onboard PM position on the magnetic force and stiffness performance of multi-seeded YBCO. J. Alloys Comp. 644, 267–273 (2015)
Ozturk, K., Abdioglu, M., Sahin, E., Celik, S., Gedikli, H., Savaskan, B.: The effect of magnetic field distribution and pole array on the vertical levitation force properties of HTS Maglev systems. IEEE Trans. Appl. Supercond. 25(4), 3601607 (2015)
Zhang, X.Y., Zhou, Y.H., Zhou, J.: Three-dimensional measurements of forces between magnet and superconductor in a levitation system. Physica C 467, 125–129 (2007)
Zhou, Y.H., Zhang, X.Y., Zhou, J.: Relaxation transition due to different cooling processes in a superconducting levitation system. J. Appl. Phys. 103, 123901 (2008)
Deng, Z., Wang, J., Zheng, J., Jing, H., Lu, Y., Ma, G., Liu, L., Liu, W., Zhang, Y., Wang, S.: High-efficiency and low-cost permanent magnet guideway consideration for high-Tc superconducting Maglev vehicle practical application. Supercond. Sci. Technol. 21, 115018 (2008)
Lu, Y., Ge, Y., Liu, M., Wang, J.: High-performance permanent magnet railway design consideration of magnetic stiffness parameters of YBCO bulk arrays. J. Supercond. Nov. Magn. 24(5), 1787–1791 (2011)
Abdioglu, M., Ozturk, K., Gedikli, H., Ekici, M., Cansiz, A.: Levitation and guidance force efficiencies of bulk YBCO for different permanent magnetic guideways. J. Alloys Comp. 630, 260–265 (2015)
Moon, F.C.: Superconducting Levitation. Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim (1994)
Acknowledgments
This work was supported by the Scientific and Technological Research Council of Turkey (TÜBİTAK), with project no. 112T090, and the Scientific Research Project Fund of Karadeniz Technical University in Turkey, with project no. 11060.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Abdioglu, M., Kabaer, M., Ozturk, K. et al. Lateral Position Effect of Auxiliary Permanent Magnets on the Magnetic Force Properties of Cylindrical YBCO. J Supercond Nov Magn 30, 2933–2938 (2017). https://doi.org/10.1007/s10948-016-3685-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10948-016-3685-x