
Abstract
Our recent work (Kang and Wang in J Sci Comput 82:1–33, 2020) performed a complete asymptotic analysis and proposed a modified Filon-type method for a class of oscillatory infinite Bessel transform with a general oscillator. In this paper, we present and analyze a different method by converting the integration path to the complex plane for this class of oscillatory infinite Bessel transform. In particular, we establish a series of new quadrature rules for this transform and carry out rigorous analysis, including the cases that the oscillator g(x) has either zeros or stationary points. The error analysis shows the advantages that this approach exhibits high asymptotic order, and the accuracy improves significantly as either the frequency \(\omega \) or the number of nodes n increases. Furthermore, the constructed method shows higher accuracy and error order by comparing with the existing modified Filon-type method in our recent work (Kang and Wang 2020) at the same computational cost. Some numerical experiments are provided to verify the theoretical results and demonstrate the efficiency of the proposed method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
It is generally known that highly oscillatory Bessel transforms arise frequently in many areas such as astronomy, electromagnetic acoustics, scattering problems, physical optics, electrodynamics, seismology image processing and applied mathematics [3, 4, 6, 7, 13, 18]. In this work, we focus on the evaluation and analysis of the highly oscillatory infinite Bessel transforms with general oscillators
where f and g are analytic in a simply connected and sufficiently (infinitely) large complex domain D containing the interval \([a, +\infty ]\), \(J_m(z)\) is the Bessel function of the first kind and of order m with \(m\ge 0\), the frequency parameter \(\omega \) is large, \(\alpha <0\), and \(a>0\). These highly oscillatory infinite integrals cannot be computed analytically and one has to resort to numerical methods. When the integrand becomes highly oscillatory, it presents serious difficulties in obtaining numerical convergence of the integration.
Here, we introduce some related articles for computing infinite oscillatory integrals. In 1976, Blakemore, Evans and Hyslop [5] made comparison of some numerical methods for computing infinite oscillatory integrals. However, those methods presented in [5] converge slowly, and have to use an extrapolation technique to accelerate convergence. The asymptotics and fast computation of one-sided oscillatory infinite Hilbert transforms was studied in [28] by Wang, Zhang and Huybrechs. Xu, Xiang and He developed the fast computation of a class of oscillatory infinite Bessel Hilbert transform in [37]. An asymptotic Filon-type method for calculating the infinite oscillatory integral \(\int _a^{+\infty } f(x)e^{i\omega g(x)}dx\) was established by Hascelik in [16]. Based on the idea of [16], in [9, 10], Chen presented the efficient numerical methods for approximating the integral \(\int _a^{+\infty }f(x)J_m(\omega x)dx\). Moreover, numerical methods for calculating the oscillatory infinite integrals of the form \(\int _{1}^{+\infty }x^\alpha f(x)K(\omega x)dx\) were investigated in [21, 22], where \(K(\omega x)\) denote different oscillatory kernel functions, such as \(e^{i\omega x}\), \(J_m(\omega x)\), \(Y_m(\omega x)\), \(H_m^{(1)}(\omega x)\), \(H_m^{(2)}(\omega x)\), \(Ai(-\omega x)\), respectively. Recently, Chen in [11] developed an asymptotic rule for approximating the infinite Bessel transform \(\int _0^{+\infty }f(x)J_m(\omega x)dx\). Additionally, there has been tremendous interest in constructing numerical methods for finite oscillatory Bessel transforms (including singular or nonsingular cases) in articles [8, 19, 20, 24, 25, 27, 29, 33,34,35,36, 38]. Recently, new Levin methods were presented for calculating a class of the Fourier-type integral with algebraic and/or logarithmic singularities in [30]. Moreover, the numerical steepest descent method for the Fourier-type integral \(\int _a^bf(x)e^{i\omega g(x)}dx\) proposed by Huybrechs and Vandewalle [17] in 2006 restricts that f is analytic in a sufficiently large complex region that contains [a, b]. Thanks to analytic continuation, the problem can be solved by using the Gauss–Laguerre quadrature rule. It is noteworthy that Kang and Wang in [23] provided asymptotic analysis and gave a modified Filon-type method for computing the considered integral (1.1). It can achieve the higher accuracy by either adding derivatives at the critical points (including zeros, end points and stationary points) or increasing the number of interpolation nodes. However, its derivatives are sometimes difficult to obtain for the complicated function f(x). Moreover, only increasing the number of interpolation points cannot improve the error order. This motivates us to explore a more efficient methods such that the obtained error order can be improved greatly by adding the node points.
The aim of this paper is to construct a numerical approach with higher error order for calculating the infinite integrals (1.1) with general oscillators. We propose a complex integration method for the Bessel transform (1.1) by converting the original integration path to the complex plane. The proposed numerical scheme shows the advantages that the obtained error order can be improved by increasing the number of node points n. Thanks to the relation between Bessel function and Hankel function, the computation of (1.1) can be changed into the problem of calculating the Hankel transform. In particular, we remedy the problem that the corresponding Hankel functions of the first kind \(H_m^{(1)}(\omega g(x))\) and the second kind \(H_m^{(2)}(\omega g(x))\) have singularities as \(g(x)\rightarrow 0\) when the oscillator g(x) has zeros on the integral interval. Moreover, the stationary points of g(x) play a crucial role in our theoretical analysis. Therefore, for the case of g(x) without stationary points, we consider the following two types:
Type I : g(x) has no zero points, i,e., \(g(x)\not =0\) on \([a, +\infty )\);
Type II :g(x) has zeros, i,e., \(\exists \) \(\xi \in [a, +\infty )\), s.t. \(g(\xi )=0\).
The case that g(x) has stationary points, can be also classified into the following two types:
Type I : g(x) has stationary points, which are also zeros, i,e., \(\exists \) \(\zeta \in [a, +\infty )\), s.t. \(g(\zeta )=g'(\zeta )=\cdots =g^{(r)}(\zeta )=0\) and \(g^{(r+1)}(\zeta )\not =0\) , \(r\ge 1\);
Type II :g(x) has stationary points, which are not zeros, i,e., \(\exists \) \(\zeta \in [a, +\infty )\), s.t. \(g'(\zeta )=g''(\zeta )=\cdots =g^{(r)}(\zeta )=0\), \(g^{(r+1)}(\zeta )\not =0\) and \(g(\zeta )\not =0\) , \(r\ge 1\).
For the above four cases, we derive the corresponding efficient quadrature formulae and perform the rigorous error analysis.
The structure of this paper is as follows. In Sect. 2, we analyze in detail the above two cases that g(x) has no stationary point. We explore the quadrature rules and error analysis for the case that g(x) has stationary points in Sect. 3. Additionally, some numerical experiments are illustrated to verify the established method in Sect. 4. The comparison results between the established method and the modified Filon-type method [23] is also shown in this section. Section 5 exhibits some summaries of this paper.
2 The Case Without Stationary Points
In this section, let us focus on the case that g(x) has no stationary points on the integration interval \([a, +\infty )\), i.e., \(g'(x)\not =0\) for \(x\in [a, +\infty )\) and \(\lim _{x\rightarrow +\infty }g'(x)\ne 0\). This case includes two types that
Type I: g(x) has no zero points, i,e., \(g(x)\not =0\) on \([a, +\infty )\);
Type II: g(x) has zeros, i,e., \(\exists \) \(\xi \in [a, +\infty )\), s.t. \(g(\xi )=0\).
We first introduce some preliminaries which will be used in the later sections. From [2, p. 358], the relation formulae between the Hankel functions and the Bessel functions are as follows,
where \(H_m^{(1)}(x)\) and \(H_m^{(2)}(x)\) denote the Hankel functions of the first and second kinds of order m, respectively, and \(Y_m(x)\) denotes the Bessel function of the second kind of order m. Moreover, when m is fixed and \(|x|\rightarrow \infty \), the Hankel functions have the following asymptotic properties [2, p. 364],
The definition of the notation “ \(\sim \) ” is as follows. If \(f(x)/\varphi (x)\) tends to unity as \(x\rightarrow x_0\), we write \(f(x)\sim \varphi (x)\ \ \ (x\rightarrow x_0)\). In words, f is asymptotic to \(\varphi \).
In the sequel, we commence our analysis for the case of the type I.
2.1 Type I: g(x) Without Zero Points
We begin this subsection with an useful theorem concerning the reconstruction of the integration path.
Theorem 2.1
Assume that both g and f are analytic in D, and \(g(x)\not =0\), \(g'(x)\not =0\) for \(x\in [a, +\infty )\). And, \(\lim _{x\rightarrow +\infty }g'(x)\ne 0\). Denote that \(\varGamma _{2}(p)=g^{-1}(g(a)+ip), \varLambda _{2}(p)=g^{-1}(g(a)-ip)\). Suppose that \(|\varGamma _{2}(p)|\), \(|\varLambda _{2}(p)|\), \(|g'(\varGamma _{2}(p))|, |g'(\varLambda _{2}(p))|\ge \varepsilon _0, p\in [0, +\infty )\), where \(\varepsilon _0\) is a positive constant. For \(\omega >(\alpha +\nu +1)\omega _1\) and \(\alpha <0\), if the following conditions hold in D:
where the zero order derivative of the function is the function itself, then it is true that
Proof
Based on the important relations (2.1) and (2.2), the integral I[f] can be rewritten as
Here we give a notation as
Therefore, the key point is to construct the quadrature rules for the integrals \(I_1[f]\) and \(I_2[f]\), respectively.
By using (2.3) and (2.4), as \(|\omega g(x)| \rightarrow \infty \), we can get
Then, the integrals \(I_1[f]\) and \(I_2[f]\) can be rewritten as
where it can be seen from the two asymptotic formulae (2.12) and (2.13) that \(H_m^{(1)}(\omega g(x)) e^{-i\omega g(x)}\) and \(H_m^{(2)}(\omega g(x))e^{i\omega g(x)}\) are not oscillatory as \(|\omega g(x)| \rightarrow \infty \).

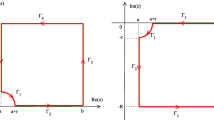
The integration paths for the oscillator g(x) in \(e^{i\omega g(x)}\) (left figure) and the oscillator g(x) in \(e^{-i\omega g(x)}\) (right figure)
We shall construct the quadrature rules for \(I_1[f]\) and \(I_2[f]\) by the careful selection of the integration paths in the complex region, which are drawn in Fig. 1.
On the left panel of Fig. 1, \(\varGamma _2(p)=g^{-1}(g(a)+ip), p\in [0, +\infty )\). Here, \(\varGamma _2(p)\) has one intersection \(\varGamma _2(p_{A})\) with the circle \(a+(A-a)e^{i\theta }, \theta \in [0, 2\pi )\). The parametric form of \(\varGamma _3\) is written as \(\varGamma _3(\theta )=a+(A-a)e^{\text {sgn}(\theta _A)i\theta }, \theta \in \left[ 0, |\theta _A|\right] \), where \(\theta _A=\arg \varGamma _2(p_{A})\).
Then, by Cauchy’s integral theorem [1, 15] in Fig. 1 (left figure), we have
From the asymptotic formula (2.3) of the Hankel function, we have
where M is some positive constant.
Furthermore, for \(\alpha <0\), from (2.5), (2.6) and (2.17), it exists some positive number \(M_1\), such that it follows that
as \(A\rightarrow +\infty \). Here, when \(A\rightarrow +\infty \), it follows from (2.6) that \(|\Im (g(a+(A-a)e^{\text {sgn}(\theta _A)i\theta }))|\rightarrow +\infty \) and \(|g(a+(A-a)e^{\text {sgn}(\theta _A)i\theta })|\rightarrow +\infty \).
Therefore, letting \(A\rightarrow +\infty \) in (2.16), we have
Similarly, by using the new path shown on the right panel of Fig. 1 with \(\varLambda _2(p)=g^{-1}(g(a)-ip), p\in [0, +\infty )\), we have that
The Eqs. (2.9), (2.18) and (2.19) yield the desired result (2.8). Thus, we complete this proof. \(\square \)
Letting \(q=\omega p\) in (2.18) and (2.19), we have that
and
Then, by using the Gauss–Laguerre quadrature rule with the nodes \(x_k\) and the weights \(a_k, k=1, 2, \ldots , n\), we have the respective n-point quadrature formulae for \(I_1[f]\) and \(I_2[f]\), as follows,
and
Then the considered integral (1.1) can be approximated by the quadrature formula
Now, we show the error analysis of the above presented numerical method.
Theorem 2.2
Under the assumption conditions of Theorem 2.1, the error of the quadrature formula (2.24) behaves asymptotically as
Proof
From [31], for large |z|, it follows that
where \((x)_j\) is defined by
Denote that \(F_\omega (u)=\varGamma ^\alpha _{2}(u)f[\varGamma _{2}(u)]\varGamma '_{2}(u), u=\frac{q}{\omega }\) and \(G_\omega (q)\!=\!\sum \limits _{j=0}^{2n+1}\frac{(\frac{1}{2}+m)_j(\frac{1}{2}-m)_j}{j!(2i)^j(\omega g(a)+iq)^{j+\frac{1}{2}}}\). Using Hermite interpolation for the function \(F_\omega \left( \frac{q}{\omega }\right) G_\omega (q)\), we construct the interpolation polynomial \(P_{2n-1}(\frac{q}{\omega })\), which satisfies that
where \(x_k, k=1,2,\ldots ,n\) are Gauss–Laguerre nodes. Then, we have the following n-point Gauss–Laguerre quadrature formula
The error formula is written as
Thus, using the remainder formula of Hermite interpolation, we can obtain that
where \(Ln(x)=\prod _{j=1}^n(x-x_j), \gamma \in (0, \max (q,x_n)).\) Therefore, based on (2.26) and (2.27), the error can be expressed as
where \(\gamma \in (0, \max (q,x_n))\).
Here, for the integral in the last line of (2.28), we have that
where \(M_2\) is some positive constant. The integral in the fourth line of (2.29) is a definite integral, which must be convergent. In the following, it can be shown that the infinite integral in the last line of (2.29) is also convergent. Based on (2.5) and (2.7), we know that
If \(\frac{(\alpha +\nu +1)\omega _1}{\omega }-1<0\), i.e. \(\omega >(\alpha +\nu +1)\omega _1\), \(|\varGamma _2(\frac{q}{\omega })|\ge \varepsilon _0>0\) and \(|g'(\varGamma _2(\frac{q}{\omega }))|\ge \varepsilon _0>0\), there exists \(\beta >1\) such that it follows from (2.5) and (2.7) that
Based on Cauchy’s test, the integral in the last line of (2.29) is also convergent. Therefore, for the integral in the last line of (2.28), we can deduce that
Moreover, as \(\omega \rightarrow +\infty \), it can be derived that
Similarly, we can obtain
Letting \(u=\frac{q}{\omega }\) in \(F_\omega (\frac{q}{\omega })\), combining (2.5) and (2.7), we have that
Based on (2.31) and (2.32), using Leibniz’s Theorem [2, p. 12], the integral in the seventh line of (2.28) can be written as
where \([F_\omega (\frac{q}{\omega }) G_\omega (q)]^{(2n)}|_{q=\gamma }=\frac{1}{\omega ^{2n+\frac{1}{2}}}R(\gamma )\) and \(R(\gamma )\) is a very long function expression of \(\gamma \) and is omitted. Using a similar proof of (2.30) and by Cauchy’s test, under these conditions that \(|\varGamma _2(\frac{q}{\omega })|\ge \varepsilon _0>0\) and \(|g'(\varGamma _2(\frac{q}{\omega }))|\ge \varepsilon _0>0\), for \(\omega >(\alpha +\nu +1)\omega _1\), it can be verified from (2.32) that the infinite integral \(\int _0^{+\infty }\frac{R(\gamma )}{(2n)!}Ln^2(q)e^{-q}dq\) is also convergent. Hence, it follows that
Therefore, from (2.28), (2.30) and (2.33), we have
In a similar way, we obtain
Hence, we have the desired results that
This completes the proof of (2.25). \(\square \)
In the following, we will devise a new method and perform its rigorous error analysis for the case that g(x) has zero points.
2.2 Type II: g(x) with Zero Points
In this subsection we are concerned with the case that g(x) has zeros on the integration interval \([a, +\infty )\). For convenience, we consider that g(x) has a single zero point on the interval \([a, +\infty )\), e.g., \(g(\xi ) = 0\) where \(\xi \in [a, +\infty )\). If g has a finite number of zeros on the interval \([a, +\infty )\), we can divide the whole interval into subintervals, such that the function g contains only a single zero point on each subinterval. The resulting subintervals may include the finite interval, and the integral on the finite interval can be computed in the similar way. Before proceeding, let us explain why the quadrature formula presented in the Sect. 2.1 fails when g has a zero point on \([a, +\infty )\). We see clearly that a simple pole at \(x = \xi \) is introduced in the terms \(H_m^{(1)}(\omega g(x))\) and \(H_m^{(2)}(\omega g(x))\), and thus the complex integration methods in the Sect. 2.1 is no longer valid. To remedy this, we may make a series of transformations such that the resulting integrand has a removable singularity at \(x = \xi \).
Here we only consider the case that the single zero point \(\xi =a\), i.e., \(g(a)=0\). If \(\xi \not =a\), we divided the interval into \([a, \xi ]\) and \([\xi , +\infty )\) to ensure the zero point being the endpoint. Since g(x) has no stationary points on \([a, +\infty )\), g(x) is a monotonous function on \([a, +\infty )\). Thus, \(t=g(x)\) is a bijection and then has an inverse function \(x=g^{-1}(t)\). Assume that \(g(x)\rightarrow +\infty \) as \(x\rightarrow +\infty \). Setting \(g(x)=t\), we rewrite I[f] as
where \(G_1(t)=[g^{-1}(t)]^\alpha f[g^{-1}(t)][g^{-1}(t)]'\).
Furthermore, the function \(G_1(t)\) can be expressed as
where
and [m] denotes the smallest integer not less than m.
Combining (2.36) with (2.37), we have
where \(L_1(t)=G_1(t)-\sum ^{R_1}_{j=0}\frac{G_1^{(j)}(0)}{j!}t^j\). And, suppose that \(I_{R_1}=\sum ^{R_1}_{j=0}\frac{G_1^{(j)}(0)}{j!}\int _{0}^{+\infty }t^jJ_m (\omega t)dt.\)
The integral \(I_{R_1}\) can be exactly calculated by the explicit formula
where \(G(\omega ,m,j)\) can be expressed by the following formulae (see [14, p. 676], [26, p. 44] and [2, p. 480]), for \(\Re (j+m)>-1, \omega >0\),
Here, \(S_{\mu ,\nu }(z),\varGamma (z),{_1F_2}(\mu ;\nu ,\lambda ;z), G^{m,n}_{p,q}\) denote the Lommel function of the second kind, the Gamma function, a class of generalized hypergeometric function, and the Meijer G-function, respectively. Moreover, \({_1F_2}(\mu ;\nu ,\lambda ;z)\) converges for all |z|. From [32, p. 346], \(S_{\mu ,\nu }(z)\) can be expressed in terms of \({_1F_2}(\mu ;\nu ,\lambda ;z)\), namely,
where \(Y_\nu (z)\) is a Bessel function of the second kind of order \(\nu \). The efficient implementation of the moments is based on the fast computation of the above-mentioned special functions. Obviously, when programming the proposed algorithm in a language like Matlab, we can calculate the values of \(\varGamma (z), J_m(z),Y_m(z)\), \({_1F_2}(\mu ;\nu ,\lambda ;z)\) and \( G^{m,n}_{p,q}\) by invoking the built-in functions ‘gamma(z)’, ‘besselj(m, z)’,‘bessely(m, z)’, ‘hypergeom\((\mu , [\nu ,\lambda ], z)\)’, ‘meijerG\(([a_1,...,a_n],[a_{n+1},...,a_p],[b_1,...,b_m],[b_{m+1},..., b_q], z)\)’, respectively.
In the following, we develop the numerical scheme for approximating the integral \(I_{L_1}=\int _{0}^{+\infty }L_1(t)J_m(\omega t)dt\). We first give a key result, as follows.
Theorem 2.3
Assume that both g and f are analytic in D. Moreover, g and f satisfy those conditions (2.5)–(2.7). And, g has a single zero point at \(x=a\) and \(g'(x)\not =0\) on \([a, +\infty )\). Also, \(\lim _{x\rightarrow +\infty }g'(x)\ne 0\). Then it is true that
Proof
It follows immediately from (2.1) and (2.2) that
Here, assume that \(I_{L_1,1}=\int _{0}^{+\infty }L_1(t)H_m^{(1)}(\omega t)dt\) and \(I_{L_1,2}=\int _{0}^{+\infty }L_1(t)H_m^{(2)}(\omega t)dt\).
Moreover, the integral \(I_{L_1,1}\) can be expressed as
For computing the integral in (2.46), we choose the new path in the complex plane, which is drawn on the left panel of Fig. 2.

The integration paths for the oscillator \(g(t)=t\) in \(e^{i\omega t}\) (left figure) and the oscillator \(g(t)=-t\) in \(e^{-i\omega t}\) (right figure) on the interval \([0, +\infty )\)
In Fig. 2, the integration paths are expressed by parametric forms: in the left figure: \(\varGamma _2(p)=ip\), \(\varGamma _3(\theta )=Ae^{i\theta }\), \(p\in [0, A], \theta :\frac{\pi }{2}\rightarrow 0\); in the right figure: \(\varLambda _2(p)=-ip\), \(\varLambda _3(\theta )=Ae^{i\theta }\), \(p\in [0, A], \theta :-\frac{\pi }{2}\rightarrow 0\).
First, we consider the integral \( I_{L_1,1}\). By the Cauchy residue theorem (see Fig. 2 (left figure)), we obtain that
And, by the method which is similar to the proof of Theorem 2.1, we have that
Therefore, by letting \(A \rightarrow +\infty \) in (2.47), we have
Similarly, from Fig. 2 (right figure), we can obtain
Combining (2.45), (2.48) and (2.49), we can get the result (2.44). So we complete this proof. \(\square \)
Letting \(q=\omega p\) in (2.48) and (2.49), we can get
and
By using n-point Gauss–Laguerre quadrature rules for (2.50) and (2.51), together with the Eq. (2.45), the integral \(I_{L_1}\) can be calculated by the following formula
Thus, the integral (1.1) can be approximately evaluated by
We shall give its error analysis as follows.
Theorem 2.4
Under the assumption conditions of Theorem 2.3, the error of the quadrature formula (2.53) behaves asymptotically as
Proof
It follows that
It follows from [2, p. 360] that
as \(|z|\rightarrow 0\).
Since \(L_1(t)=O(t^{R_1+1})\), based on (2.55), (2.56), by using Leibniz’s Theorem [2, p. 12] and the similar proof of Theorem 2.2, we have
as \(\omega \rightarrow +\infty \). Hence, the desired results (2.54) can be obtained. \(\square \)
3 Numerical Evaluation for the Case of Stationary Points
When \(g'(\zeta )=0\), \(\zeta \in [a, +\infty )\), we call \(x=\zeta \) as a stationary point. Further, we consider \(x=\zeta \) as a stationary point of order r if \(g^{(j)}(\zeta )=0, j = 1, 2, \ldots , r\) and \(g^{(r+1)}(\zeta )\not = 0\), where \(r \ge 1\). In this section, we put our attention to the case that g(x) has only one stationary point of order r at \(x = \zeta \in [a, +\infty )\), i.e., \(g'(x)\not = 0\) for \(x \in [a, +\infty )\backslash \{\zeta \}\), and \(\lim _{x\rightarrow +\infty }g'(x)\ne 0\). We also assume that \(g(x)\not = 0\) for \(x \in [a, +\infty )\backslash \{\zeta \}\). The stationary point can be classified into the following two types:
3.1 \(\text {Type I}: g(\zeta ) = 0\)
Here we commence our analysis for the former case, i.e., \(x = \zeta \) is a stationary point of \(\text {Type I}\). If \(\zeta \in (a, +\infty )\), we shall divide the integral interval into two subintervals \([a, \zeta ]\) and \([\zeta , +\infty )\) to ensure that the inverse function of g exists uniquely in any subinterval. And the integral on \([a, \zeta ]\) can be computed in a similar way. To simplify this procedure, without loss of generality, we assume that \(\zeta =a\).
Assume that \(g(x)\rightarrow +\infty \) as \(x\rightarrow +\infty \). With the help of a diffeomorphic transformation \(g(x)=(t-a)^{r+1}\), we rewrite (1.1) as
where \(G_2(t)=[g^{-1}((t-a)^{r+1})]^\alpha f[g^{-1}((t-a)^{r+1})][g^{-1}((t-a)^{r+1})]'\). And, the function \((t-a)^{r+1}\) is well-defined on \([a, +\infty )\).
Set
where
and \([m(r+1)]\) denotes the smallest integer not less than \(m(r+1)\). Furthermore, the expression (3.1) can be rewritten as
Suppose that \(I_{R_2}=\sum ^{R_2}_{j=0}\frac{G_2^{(j)}(a)}{j!}\int _{a}^{+\infty }(t-a)^jJ_m(\omega (t-a)^{r+1})dt\). And the generalized moments \(\int _{a}^{+\infty }(t-a)^jJ_m(\omega (t-a)^{r+1})dt\) can be transformed into the following form
which can be exactly computed by (2.39)–(2.42).
Now we begin to develop the quadrature rule for the integral \(I_{L_2}=\int _a^{+\infty } L_2(t)J_m(\omega (t-a)^{r+1})dt\). We first give an useful result, as follows.
Theorem 3.1
Suppose that both g and f are analytic in D, g and f satisfy those conditions (2.5)–(2.7), and g has a stationary point of Type I and of order r at \(x=a\). Moreover, if we assume that \(g(x)\not =0, g'(x)\not =0\) for \(x\in (a, +\infty )\), and \(\lim _{x\rightarrow +\infty }g'(x)\ne 0\), then it is true that
where \(\varGamma (p)=a+\root r+1 \of {ip}\) and \(\varLambda (p)=a+\root r+1 \of {-ip}\), \(p\in [0, +\infty )\).
Proof
where we denote \(I_{L_2,1}=\int _a^{+\infty } L_2(t)H_m^{(1)}(\omega (t-a)^{r+1})dt\) and \(I_{L_2,2}=\int _a^{+\infty } L_2(t)H_m^{(2)}(\omega (t-a)^{r+1})dt\). Then we apply the method in Theorem 2.1 to \(I_{L_2,1}\) and \(I_{L_2,2}\), respectively.
For the computation of \(I_{L_2,1}\), we choose the optimal integral path that
From Theorem 2.1 and by letting \(P\rightarrow \infty \), similarly, we have that
For the computation of \(I_{L_2,2}\), we choose the optimal integral path that
Following Theorem 2.1 and by letting \(P\rightarrow +\infty \), similarly, we obtain that
Combining the Eqs. (3.4), (3.5) and (3.6), the desired result (3.3) can be obtained. Thus, we complete the proof. \(\square \)
By setting \(q=\omega p\) in (3.5), it is not difficult to get
In (3.7), \(\varGamma '(\frac{q}{\omega })\) has a singularity of the form \(q^{\beta }\) as \(q\rightarrow 0\), where \(\beta =\frac{1}{r+1}-1\), since \(\varGamma (p)=a+\root r+1 \of {ip}\). Fortunately, these types of singularities can be handled efficiently by the generalized Gauss–Laguerre quadrature. Generalized Laguerre polynomials are orthogonal with respect to the weight function \(x^\beta e^{-x}, \beta > -1\) [12]. Then the integral (3.7) can be rewritten as
Therefore, we can use the generalized Gauss–Laguerre quadrature rule with n points \(t_k\) and weights \(c_k, k=1, 2, \ldots , n\), for computing the integral (3.8). Then the desired quadrature formula of \(I_{L_2,1}\) is as follows,
By setting \(q=\omega p\) in (3.6), it follows immediately that
By the similar process with the derivation of (3.8) and (3.9), we can get the quadrature formula for \(I_{L_2,2}\),
Combining (3.2) and (3.4), we finally obtain the n-point quadrature formula for the integral (1.1),
In the following portion, we will show the error analysis for the quadrature formula (3.12).
Theorem 3.2
Under the assumption conditions of Theorem 3.1, the error of the quadrature formula (3.12) behaves asymptotically as
where \(\beta =\frac{1}{r+1}-1\).
Proof
It follows that
Since \(L_2(t)=O(t^{R_2+1})\), by using the Leibniz’s Theorem [2, p. 12] and the similar proof of Theorem 2.2, it follows from (2.55), (2.56) and (3.14) that \(I_{L_2, 1}-Q_{L_2, n,1}=O(\omega ^{-2n-\frac{3}{2}-\beta })\). We can also easily obtain that \(I_{L_2, 2}-Q_{L_2, n, 2}=O(\omega ^{-2n-\frac{3}{2}-\beta })\) by using the same procedure. So we have
Hence, the error is asymptotically of the order \(O\left( \omega ^{-2n-\frac{3}{2}-\beta }\right) \). We complete this proof. \(\square \)
In the following, we shall present and analyze the numerical integration method of Type II, i.e., \(g(\zeta ) \not = 0\).
3.2 \(Type II: g(\zeta ) \not = 0\)
Similarly, if \(\zeta \in (a, +\infty )\), we shall divide the integral interval into two subintervals \([a, \zeta ]\) and \([\zeta , +\infty )\) to ensure that the inverse of g exists uniquely in any subinterval. In order to simplify our analysis process, without loss of generality, we assume that \(\zeta =a\). Since \(g(\zeta ) \not = 0\), i.e., g has no zero in \([a, +\infty )\), the function \(H_m^{(1)}(\omega g(x))\) and \(H_m^{(2)}(\omega g(x))\) always satisfy the conditions (2.12) and (2.13) on \([a, +\infty )\), respectively.
Based on (2.1) and (2.2), we have
Here we give the notation that \(I_1[f]=\int _a^{+\infty } f(x)H_m^{(1)}(\omega g(x))dx\) and \(I_2[f]=\int _a^{+\infty } f(x)H_m^{(2)}(\omega g(x))dx\). By analogy with (2.20), we obtain that
We now rewrite the Taylor series of g as
since \(g^{(j)}(a)=0, j=1, 2, \ldots , r\). The path \(\varGamma _2(p)=g^{-1}(g(a)+ip)\) solves \(g(\varGamma _2(p))=g(a)+ip\), and thus it leads to the fact that
This suggests immediately that
In (3.16), \(\varGamma '_{2}(\frac{q}{\omega })=O(q^{\beta })\), identical to (3.8). Similarly, we can obtain the quadrature formula for the integral \(I_1[f]\), as follows,
By the same process, we can derive the approximation of \(I_2[f]\),
Therefore, we get the n-point quadrature rule for the considered integral I[f] that
The error estimate of (3.21) will be given as follows.
Theorem 3.3
Suppose that both g and f are analytic in D, and g has a stationary point of Type II and of order r at \(x=a\). Also, g and f satisfy those conditions (2.5)–(2.7). Moreover, if we suppose that \(g'(x)\not =0\) for \(x\in (a, +\infty ), \lim _{x\rightarrow +\infty }g'(x)\not =0\) and \(g(x)\not =0\) on \([a, +\infty )\), then the error of the quadrature formula (3.21) behaves asymptotically as
where \(\beta =\frac{1}{r+1}-1\).
The proof is similar to that of Theorem 3.2 and hence it is omitted here.
4 Numerical Experiments
In this section, we test some numerical examples to demonstrate the quality of the evaluations obtained by the proposed quadrature rules. In the following figures, “ E ” denotes the absolute error produced by the numerical methods.
4.1 The Case Without Stationary Points: Type I: \(g(x)\ne 0\) for \(x\in [a,+\infty )\)
Example 1
Let us consider the evaluation of \(\int _1^{+\infty } x^{-4}\sin {\frac{1}{x}}J_2(\omega x)dx\) by \(Q_n[f]\) derived in (2.24) and numerical results are shown in Fig. 3.

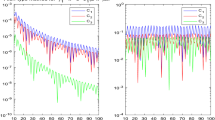
The base-10 logarithm of the absolute error (left figure) and absolute error scaled by \(\omega ^{2n+\frac{3}{2}}\) (right figure) of the integral \(\int _1^{+\infty } x^{-4}\sin {\frac{1}{x}}J_2(\omega x)dx\) with \(n=2, 3, 4\), respectively
Example 2
We focus on the computation of \(\int _1^{+\infty } x^{-2}e^{-x}J_1(\omega x^2)dx\) by \(Q_n[f]\) derived in (2.24) and numerical results are shown in Fig. 4.

The base-10 logarithm of the absolute error (left figure) and absolute error scaled by \(\omega ^{2n+\frac{3}{2}}\) (right figure) of the integral \(\int _1^{+\infty } x^{-2}e^{-x}J_1(\omega x^2)dx\) with \(n=2, 3, 4\), respectively
The numerical results of the quadrature rule (2.24) are illustrated in Figs. 3 and 4. On the left panel of the two figures, we can see that the presented method has the advantageous property that its accuracy improves when the frequency \(\omega \) increases for fixed nodes n. At the same time, it is obvious that the precision can improve significantly by adding more nodes for fixed \(\omega \). Particularly, only using a few nodes, such as \(n=2, 3, 4\), the desired accuracy level can be achieved. On the right panel of the two figures, we illustrate the absolute error scaled by \(\omega ^{2n+\frac{3}{2}}\), which can verify the asymptotic error order shown in Theorem 2.2.
4.2 The Case Without Stationary Points: Type II: g(x) Having Zeros on \(x\in [a,+\infty )\)
Example 3
We consider the computation of \(\int _1^{+\infty } x^{-1}\sin {\frac{1}{x}}J_1(\omega (x-1))dx\) by \(Q_n[f]\) derived in (2.53) and numerical results are shown in Fig. 5.

The base-10 logarithm of the absolute error (left figure) and absolute error scaled by \(\omega ^{2n+\frac{3}{2}}\) (right figure) of the integral \(\int _1^{+\infty } x^{-1}\sin {\frac{1}{x}}J_1(\omega (x-1))dx\) with \(R_1=2n+[m]-1, n=2, 3, 4\), respectively
Example 4
Let us focus on the approximation of \(\int _1^{+\infty } x^{-\frac{1}{2}}\frac{1}{1+x}J_{\frac{1}{3}}(\omega (2x^2-2x))dx\) by \(Q_n[f]\) derived in (2.53) and numerical results are shown in Fig. 6.

The base-10 logarithm of the absolute error (left figure) and absolute error scaled by \(\omega ^{2n+\frac{3}{2}}\) (right figure) of the integral \(\int _1^{+\infty } x^{-\frac{1}{2}}\frac{1}{1+x}J_{\frac{1}{3}}(\omega (2x^2-2x))dx\) with \(R_1=2n+[m]-1, n=2, 3, 4\), respectively
It is clear from Examples 3 and 4 that the presented method exhibits the fast convergence as shown on the left panel of Figs. 5 and 6. On one hand, the accuracy improves greatly as \(\omega \) increases for fixed n. On the other hand, the accuracy improves as the number of nodes n increases for fixed \(\omega \). Furthermore, the decay rate of the absolute error satisfies \(O(\omega ^{-2n-\frac{3}{2}})\) while letting \(R_1=2n+[m]-1\), which can confirm our error analysis shown in Theorem 2.4. As expected, for fixed nodes n, the precision of \(Q_{n}[f]\) improves as \(\omega \) increases.
4.3 The Case with Stationary Points: Type I: \(g(\zeta )=0\)
Example 5
We consider the calculation of \(\int _1^{+\infty } x^{-3}\frac{1}{1+x^3}J_5(\omega (x-1)^2)dx\) by \(Q_n[f]\) derived in (3.12) and numerical results are shown in Fig. 7.

The base-10 logarithm of the absolute error (left figure) and absolute error scaled by \(\omega ^{2n+\frac{3}{2}+\beta }\) (right figure) of the integral \(\int _1^\infty x^{-3}\frac{1}{1+x^3}J_5(\omega (x-1)^2)dx\) for \(n=2,3,4, r=1, R_2=2n+[m(r+1)]-1, \beta =-\frac{1}{2}\)
Example 6
We focus on the computation of \(\int _1^{+\infty } x^{-2}\sin {\frac{1}{x}}J_{\pi }(\omega (x-1)^3)dx\) by \(Q_n[f]\) derived in (3.12) and numerical results are shown in Fig. 8.

The base-10 logarithm of the absolute error (left figure) and absolute error scaled by \(\omega ^{2n+\frac{3}{2}+\beta }\) (right figure) of the integral \(\int _1^{+\infty } x^{-2}\sin {\frac{1}{x}}J_{\pi }(\omega (x-1)^3)dx\) with \(n=1,2,3, r=2, R_2=2n+[m(r+1)]-1, \beta =-\frac{2}{3}\)
The left figures of Figs. 7 and 8 show that the accuracy of the proposed method improves greatly by adding more node points for fixed frequency \(\omega \). Meanwhile, the proposed method for the oscillatory integral of the case that g has zeros can lead to more accurate approximations for increasing \(\omega \) with fixed n. Meanwhile, the decay rates of the absolute error shown in Figs. 7 and 8 are consistent with the error analysis in Theorem 3.2 when \(R_2=2n+[m(r+1)]-1\).
4.4 The Case with Stationary Points: Type II: \(g(\zeta )\not =0\)
Example 7
Let us consider the evaluation of \(\int _1^{+\infty } x^{-1}xJ_3(\omega ((x-1)^2+1))dx\) by \(Q_n[f]\) derived in (3.21) and numerical results are shown in Fig. 9.

The base-10 logarithm of the absolute error (left figure) and absolute error scaled by \(\omega ^{2n+\frac{3}{2}+\beta }\) (right figure) of the integral \(\int _1^{+\infty } x^{-1}xJ_3(\omega ((x-1)^2+1))dx\) with \(n=2, 3, 4\), respectively and \(\beta =-\frac{1}{2}\)
Obviously, we can see from Fig. 9 that the absolute error improves greatly by either adding more nodes for fixed \(\omega \) or increasing \(\omega \) for fixed n. Moreover, the error order shown in the right figure of Fig. 9 is \(\omega ^{2n+\frac{3}{2}+\beta }\), which is perfectly consistent with the error analysis in Theorem 3.3.
4.5 Comparison with the Modified Filon-Type Method
We make a comparison between the established method and the modified Filon-type method developed in [23] by three tables.
We can see that from Tables 1, 2 and 3 that the accuracy level of the proposed method is far higher than that of the modified Filon-type method while using the same computational cost. However, the function f in the proposed method is required to be analytic in a simply connected complex region that contains the interval \([a, +\infty )\). The Filon-type method can relax the analytic condition and only requires the function f to be continuous on \([a, +\infty )\). Thus, the two different methods have their own advantages and disadvantages, and we can choose the appropriate approach in different situation.
5 Conclusion
In this work, we propose and analyze an efficient numerical approximation method for the oscillatory infinite Bessel transforms with general oscillators. Thanks to the relations (2.1) and (2.2) between Bessel functions and Hankel functions, the asymptotic formulae (2.3) and (2.4) of the Hankel functions, and the Taylor expansions, the considered integral (1.1) can be transformed into the tractable transforms. Then the two integrals on the interval \([0, +\infty )\) can be obtained by converting the original integration path to the complex plane. Finally, the regular or generalized Gauss–Laguerre quadrature rules can be used for calculating the two resulting integrals. In particular, we establish a series of new quadrature rules for this transform and carry out rigorous analysis, including the cases that the oscillator g(x) has zeros and stationary points. Furthermore, compared with the modified Filon-type method, the established method can achieve the higher accuracy and the decay rate of the error is faster under the given conditions.
Data Availability
All data generated or analyzed during this study are included in this article. The codes required during the algorithm implementation are available from the corresponding author on reasonable request.
References
Ablowitz, M.J., Fokas, A.S.: Complex Variables: Introduction and Applications. Cambridge University Press, Cambridge (1997)
Abramowitz, M., Stegun, I.A.: Handbook of Mathematical Functions. National Bureau of Standards, Washington (1970)
Arfken, G.: Mathematical Methods for Physicists, 3rd edn. Academic Press, Orlando (1985)
Bao, G., Sun, W.: A fast algorithm for the electromagnetic scattering from a large cavity. SIAM J. Sci. Comput. 27, 553–574 (2005)
Blakemore, M., Evans, G.A., Hyslop, J.: Comparison of some methods for evaluating infinite range oscillatory integrals. J. Comput. Phys. 22, 352–376 (1976)
Brunner, H.: Open problems in the computational solution of Volterra functional equations with highly oscillatory kernels. Effective Computational Methods for Highly Oscillatory Solutions, Isaac Newton Institute, HOP (2007)
Brunner, H.: On the numerical solution of first-kind Volterra integral equations with highly oscillatory kernels, Isaac Newton Institute. HOP: Highly Oscillatory Problems: From Theory to Applications, 13–17, Sept 2010
Chen, R.: Numerical approximations to integrals with a highly oscillatory Bessel kernel. Appl. Numer. Math. 62, 636–648 (2012)
Chen, R.: On the implementation of the asymptotic Filon-type method for infinite integrals with oscillatory Bessel kernels. Appl. Math. Comput. 228, 477–488 (2014)
Chen, R., An, C.: On the evaluation of infinite integrals involving Bessel functions. Appl. Math. Comput. 235, 212–220 (2014)
Chen, R., Xiang, S., Kuang, X.: On evaluation of oscillatory transforms from position to momentum space. Appl. Math. Comput. 344, 183–190 (2019)
Davies, P.J., Rabinowitz, P.: Methods of Numerical Integration, 2nd edn. Academic Press, San Diego (1984)
Davies, P.J., Duncan, D.B.: Stability and convergence of collocation schemes for retarded potential integral equations. SIAM J. Numer. Anal. 42, 1167–1188 (2004)
Gradshteyn, I.S., Ryzhik, I.M.: Table of Integrals, Series, and Products, 7th edn. Academic Press, New York (2007)
Henrici, P.: Applied and Computational Complex Analysis, vol. I. Wiley and Sons, New York (1974)
Hascelik, A.: An asymptotic Filon-type method for infinite range highly oscillatory integrals with exponential kernel. Appl. Numer. Math. 63, 1–13 (2013)
Huybrechs, D., Vandewalle, S.: On the evaluation of highly oscillatory integrals by analytic continuation. SIAM J. Numer. Anal. 44, 1026–1048 (2006)
Huybrechs, D., Vandewalle, S.: A sparse discretization for integral equation formulations of high frequency scattering problems. SIAM J. Sci. Comput. 29, 2305–2328 (2007)
Kang, H., Ling, C.: Computation of integrals with oscillatory singular factors of algebraic and logarithmic type. J. Comput. Appl. Math. 285, 72–85 (2015)
Kang, H., Ma, J.: Quadrature rules and asymptotic expansions for two classes of oscillatory Bessel integrals with singularities of algebraic or logarithmic type. Appl. Numer. Math. 118, 277–291 (2017)
Kang, H.: Numerical integration of oscillatory Airy integrals with singularities on an infinite interval. J. Comput. Appl. Math. 333, 314–326 (2018)
Kang, H.: Efficient calculation and asymptotic expansions of many different oscillatory infinite integrals. Appl. Math. Comput. 346, 305–318 (2019)
Kang, H., Wang, H.: Asymptotic analysis and numerical methods for oscillatory infinite generalized Bessel transforms with an irregular oscillator. J. Sci. Comput. 82, 1–33 (2020)
Levin, D.: Fast integration of rapidly oscillatory functions. J. Comput. Appl. Math. 67, 95–101 (1996)
Lewanowicz, S.: Evaluation of Bessel function integrals with algebraic singularities. J. Comput. Appl. Math. 37, 101–112 (1991)
Luke, Y.L.: Integrals of Bessel Functions. McGraw-Hill, New York (1962)
Piessens, R., Branders, M.: Modified Clenshaw–Curtis method for the computation of Bessel function integrals. BIT Numer. Math. 23, 370–381 (1983)
Wang, H., Zhang, L., Huybrechs, D.: Asymptotic expansions and fast computation of oscillatory Hilbert transforms. Numer. Math. 123, 709–743 (2013)
Wang, H.: A unified framework for asymptotic analysis and computation of finite Hankel transform. J. Math. Anal. Appl. 483, 123640 (2020)
Wang, Y.K., Xiang, S.H.: Levin methods for highly oscillatory integrals with singularities. Sci. China Math. 63, 603–622 (2022)
Wang, Z.X., Guo, D.R.: Introduction to Special Functions. Peking University Press, Beijing (2000)
Watson, G.N.: A Treatise on the Theory of Bessel Functions. Cambridge University Press, Cambridge (1952)
Xiang, S.: On quadrature of Bessel transformations. J. Comput. Appl. Math. 177, 231–239 (2005)
Xiang, S.: Numerical analysis of a fast integration method for highly oscillatory functions. BIT Numer. Math. 47, 469–482 (2007)
Xiang, S., Wang, H.: Fast integration of highly oscillatory integrals with exotic oscillators. Math. Comput. 79, 829–844 (2010)
Xiang, S., Cho, Y., Wang, H., Brunner, H.: Clenshaw–Curtis–Filon-type methods for highly oscillatory Bessel transforms and applications. IMA J. Numer. Anal. 31, 1281–1314 (2011)
Xu, Z., Xiang, S., He, G.: Efficient evaluation of oscillatory Bessel Hilbert transforms. J. Comput. Appl. Math. 258, 57–66 (2014)
Xu, Z., Milovanovic, G.: Efficient method for the computation of oscillatory Bessel transform and Bessel Hilbert transform. J. Comput. Appl. Math. 308, 117–137 (2016)
Acknowledgements
The first author was supported by Zhejiang Provincial Natural Science Foundation of China under Grant Nos. LY22A010002, LY18A010009, National Natural Science Foundation of China (Grant Nos. 11301125, 11971138) and Research Foundation of Hangzhou Dianzi University (Grant No. KYS075613017). The second author was supported by Graduate Students’ Excellent Dissertation Cultivation Foundation of Hangzhou Dianzi University (Grant No. GK208802299013-110). The authors would like to express their most sincere thanks to the referees and editors for their very helpful comments and suggestions, which greatly improved the quality of this paper.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing Interests
The authors have not disclosed any competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The first author was supported by Zhejiang Provincial Natural Science Foundation of China under Grant Nos. LY22A010002, LY18A010009, National Natural Science Foundation of China (Grant Nos. 11301125, 11971138) and Research Foundation of Hangzhou Dianzi University (Grant No. KYS075613017). The second author was supported by Graduate Students’ Excellent Dissertation Cultivation Foundation of Hangzhou Dianzi University (Grant No. GK208802299013-110).
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Kang, H., Wang, H. An Efficient Quadrature Rule for the Oscillatory Infinite Generalized Bessel Transform with a General Oscillator and Its Error Analysis. J Sci Comput 94, 29 (2023). https://doi.org/10.1007/s10915-022-02081-6
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10915-022-02081-6