
Abstract
In this paper, we investigate the spectral method for fourth-order problems defined on quadrilaterals. Some results on the Legendre irrational orthogonal approximations are established, which play important roles in the related spectral method on quadrilaterals. As examples of applications, we provide spectral schemes for a model problem with various boundary conditions. The spectral accuracy of suggested algorithms are proved. Numerical results demonstrate the effectiveness of suggested algorithms, and confirm the analysis well. The approximation results and techniques developed in this paper are also applicable to other fourth-order problems defined on quadrilaterals.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The spectral method has gained increasing popularity in scientific computations, see [2, 8, 12–15, 17–19, 28] and the references therein. The standard spectral method is traditionally confined to periodic problems and problems defined on rectangular domains. However, many practical problems are set on complex domains. We usually use finite element methods for such problems. For obtaining accurate numerical results, we may adopt spectral method and other high order methods, see, e.g., [3, 9, 16, 20, 24, 25]. We consider second-order problems mostly. But, it is also interesting and important to study fourth-order problems, see [4, 10, 23, 26, 27]. Some authors proposed the spectral method for fourth-order problems defined on rectangular domains, see [5, 6, 11]. We also refer to the work of [1]. Whereas, there has been few work in the spectral method for fourth-order problems defined on non-rectangular domains.
In this paper, we investigate the spectral method for fourth-order problems defined on quadrilaterals. We introduce the orthogonal approximation defined on quadrilaterals, by using an orthogonal system of irrational functions. Then, we establish the basic results on such approximation, which play important roles in the related spectral method. As example of applications, we provide the spectral schemes for a model problem with Dirichlet boundary condition and mixed boundary condition respectively, and prove their spectral accuracy. Numerical results demonstrate the high effectiveness of proposed algorithms, and confirm the analysis well. The approximation results and the techniques developed in this paper are also applicable to other fourth-order problems defined on quadrilaterals.
The paper is organized as follows. The next section is for preliminaries. In Sect. 3, we study the irrational orthogonal approximation on quadrilaterals. In Sect. 4, we provide the spectral schemes for a model problems with the convergence analysis, and present some numerical results. The last section is for concluding remarks. The appendix is devoted to the lifting technique.
2 Preliminaries
We first recall some results on the one-dimensional Legendre orthogonal approximation. Let \(I_\xi =\{~\xi ~|-1<\xi <1\}\) and \(\chi (\xi )\) be a certain weight function. For integer \(r\ge 0\), we define the weighted Sobolev spaces \(H^r_\chi (I_\xi )\) as usual, with the semi-norm \(|v|_{r,\chi ,I_\xi }\) and the norm \(\Vert v\Vert _{r,\chi ,I_\xi }\). In particular, \(H^0_\chi (I_\xi )=L^2_\chi (I_\xi )\) with the inner product \((u,v)_{\chi ,I_\xi }\) and the norm \(\Vert v\Vert _{\chi ,I_\xi }\). We omit the subscript \(\chi \) whenever \(\chi (\xi )\equiv 1\). We denote by \(L_l(\xi )\) the Legendre polynomial of degree \(l\). The set of all Legendre polynomials is a complete \(L^2(I_\xi )-\)orthogonal system.
Let \(N\) be any positive integer. \(\mathcal {P}_N(I_\xi )\) stands for the set of all algebraic polynomials of degree at most \(N\), and \(\mathcal {P}^0_N(I_\xi )=\mathcal {P}_N(I_\xi )\cap H^2_0(I_\xi )\). Throughout this paper, we denote by \(c\) a generic positive constant independent of any function and the mode \(N\).
The orthogonal projection \(P^{2,0}_{N,I_\xi }:H^2_0(I_\xi )\rightarrow \mathcal {P}^0_N(I_\xi )\), is defined by
Let \(\alpha ,\beta >-1\). The Jacobi weight function \(\chi ^{(\alpha ,\beta )}(\xi )=(1-\xi )^\alpha (1+\xi )^\beta \). According to Theorem 2.5 of [22], we know that if \(v\in H^2_0(I_\xi ),\,\partial ^m_\xi v\in L^2_{\chi ^{(m-2,m-2)}}(I_\xi )\), integers \(2\le m\le N+1\) and \(N\ge 2\), then
In the numerical analysis of spectral method for mixed boundary value problems, we need other orthogonal approximations. Let
The orthogonal projection \({}_0P^{2}_{N,I_\xi }:{}_0H^2(I_\xi )\rightarrow {}_0\mathcal {P}_N(I_\xi )\), is defined by
By a slight modification of proof of Theorem 2.5 of [22], we have that if \(v\in {}_0H^2(I_\xi ),~\partial ^m_\xi v\in L^2_{\chi ^{(m-2,m-2)}}(I_\xi )\), integers \(2\le m\le N+1\) and \(N\ge 2\), then
We may also let
The orthogonal projection \({}^0P^{2}_{N,I_\xi }:{}^0H^2(I_\xi )\rightarrow {}^0\mathcal {P}_N(I_\xi )\), is defined by
If \(v\in {}^0H^2(I_\xi ),~\partial ^m_\xi v\in L^2_{\chi ^{(m-2,m-2)}}(I_\xi )\), integers \(2\le m\le N+1\) and \(N\ge 2\), then
We now turn to the Legendre approximation on the square. Let \(I_\eta =\{\eta ~|~-1<\eta <1\}\) and \(S=I_\xi \otimes I_\eta \). For integer \(r\ge 0\), we define the weighted Sobolev spaces \(H^r_\chi (S)\) in the usual way, with the semi-norm \(|v|_{r,\chi ,S}\) and the norm \(\Vert v\Vert _{r,\chi ,S}\). The inner product and the norm of \(L^2_\chi (S)\) are denoted by \((u,v)_{\chi ,S}\) and \(||v||_{\chi ,S}\), respectively. We also omit the subscript \(\chi \) whenever \(\chi (\xi )\equiv 1\). Moreover, \(\mathcal {P}_N(S)=\mathcal {P}_N(I_\xi )\otimes \mathcal {P}_N(I_\eta )\) and \(\mathcal {P}^0_N(S)=\mathcal {P}_N(S)\cap H^2_0(S)\).
Let \(d\) be a non-negative constant. We introduce the bilinear form
Indeed, \(||\Delta v||_S=|v|_{2,S}\) for any \(v\in H^2_0(S)\). Moreover,
The orthogonal projection \(P^{2,0}_{N,S}:H^2_0(S)\rightarrow \mathcal {P}^0_N(S)\), is defined by
Let \(\chi ^{(\alpha ,\beta )}_1(\xi )=(1-\xi )^\alpha (1+\xi )^\beta \) and \(\chi ^{(\alpha ,\beta )}_2(\eta )=(1-\eta )^\alpha (1+\eta )^\beta \). For description of approximation errors, we introduce the quantity \(D_{r,S}(v)\). \(D_{r,S}(v)=\Vert v\Vert _{r,S}\) for \(r=2,3\). For \(r\ge 4\),
Theorem 2.1
If \(v\in H^2_0(S)\) and \(D_{r,S}(v)\) is finite for integers \(2\le r\le N+1\) and \(N\ge 2\), then
Proof
Let \(\phi =P^{2,0}_{N,I_\xi }(P^{2,0}_{N,I_\eta }v)=P^{2,0}_{N,I_\eta }(P^{2,0}_{N,I_\xi }v)\in \mathcal {P}^0_N(S)\). We use projection theorem to obtain
Clearly,
with
Also, we have
with
We use (2.1) with \(k=k_1\) and \(m=2\), and (2.1) with \(k=k_2\) and \(m=r-2\) successively, to derive that for \(r\ge 4\),
Similarly,
Next, we use (2.1) with \(k=k_1\) and \(m=r-k_2\) to obtain
Also, thanks to (2.1) with \(k=k_2\) and \(m=r-k_1\), we have
The previous statements, together with (2.7), lead to that
Then the result (2.5) with \(\mu =2\) and \(r\ge 4\) comes from (2.6) and the Poincaré inequality.
In order to derive the result (2.5) with \(\mu =2\) and \(r=2,3\), we should use the interpolation of operators, as described in Brenner and Scott [7]. To do this, we define the linear operator \({\mathcal {L}}\), which maps \(v\) to the error \(P^{2,0}_{N,S}v-v\). In other words, \({\mathcal {L}}v=P^{2,0}_{N,S}v-v\). Clearly, \(\mathcal {L}\) maps \(H^2_0(S)\) to \(H^2_0(S)\), with the norm
On the other hand, by virtue of (2.5) with \(\mu =2\) and \(r=4\), we obtain
It means that \({\mathcal {L}}\) maps \(H^4(S)\cap H^2_0(S)\) to \(H^2_0(S)\), with the norm
As is well known, the space \(H^3(S)\cap H^2_0(S)\) is the interpolation between the spaces \(H^2_0(S)\) and \(H^4(S)\cap H^2_0(S)\), see page 14 of [13]. Thus, the operator \({\mathcal {L}}\) mapping \(H^3(S)\cap H^2_0(S)\) to \(H^2_0(S)\) could be regarded as an interpolation between the operator mapping \(H^2_0(S)\) to \(H^2_0(S)\) and the operator mapping \(H^4(S)\cap H^2_0(S)\) to \(H^2_0(S)\). Accordingly, by virtue of Proposition 14.1.5 with \(\theta =\frac{1}{2}\) and \(p=2\) of [7], we have
This, along with (2.8) and (2.9), leads to \(\Vert {\mathcal {L}}\Vert _{H^3(S)\cap H^2_0(S)\rightarrow H^2_0(S)}\le cN^{-1}\). A combination of the previous statements implies the validity of the desired result (2.5) with \(\mu =2\) and \(r\ge 2\).
We now derive the result (2.5) with \(\mu =0\). Let \(g\in L^2(S)\) and consider an auxiliary problem. It is to find \(w\in H^2_0(S)\) such that
Taking \(z=w\) in (2.10) and using the Poincaré inequality, we obtain \(\Vert w\Vert _{2,S}\le c\Vert g\Vert _S\). Due to the property of elliptic equation, we have \(\Vert w\Vert _{4,S}\le c\Vert g\Vert _{S}\). Thereby, using (2.5) with \(\mu =2\) yields that
Now, by taking \(z=P^{2,0}_{N,S}v-v\) in (2.10), we use (2.5) with \(\mu =2\), (2.11) and the Poincaré inequality to verify that
Consequently,
Finally, we use the interpolation of spaces, together with the results (2.5) with \(\mu =0,2\), to deduce that \(\Vert P^{2,0}_{N,S}v-v\Vert _{1,S}\le cN^{1-r}D_{r,S}(v)\). The proof is completed. \(\square \)
In the numerical analysis of spectral method for mixed boundary value problems of fourth-order, we need other orthogonal approximations. For instance, let \(\partial ^{**}S=\{ (\xi ,\eta )~|~\xi =1 \mathrm{~or~} \eta =-1\}\), and \(\partial _nv(\xi ,\eta )\) be the normal derivative of \(v(\xi ,\eta )\) on the boundary of \(S\). We set
Let \(d,\beta \ge 0\), and
It can be shown that \(||\Delta v||_S=|v|_{2,S}\) for any \(v\in {}^0H^2(S)\). Moreover,
The orthogonal projection \({}^0P^{2}_{N,S}:{}^0H^2(S)\rightarrow {}^0\mathcal {P}_N(S)\), is defined by
With the aid of (2.2) and (2.3), we could follow the same line as in the proof of Theorem 2.1 to reach the following result.
Theorem 2.2
If \(v\in {}^0H^2(S)\) and \(D_{r,S}(v)\) is finite for integers \(2\le r\le N+1\) and \(N\ge 2\), then
3 Legendre Orthogonal Approximation on Quadrilaterals
In this section, we consider the Legendre irrational quasi-orthogonal approximations on quadrilaterals.
3.1 Some Praperations
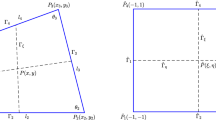
Let \(\Omega \) be a convex quadrilateral with the edges \(L_i\), the vertices \(Q_i=(x_i,y_i)\), and the angles \(\theta _i,~1\le i\le 4\), see Fig. 1. We make the following variable transformation
where

Quadrilateral \(\Omega \)
Then, the quadrilateral \(\Omega \) is changed to the reference square \(S\) as in the last section. The Jacobi matrix of transformation (3.1) is as follows,
Its Jacobian determinant is
Due to the convexity of \(\Omega \), there exist positive constants \(\delta _{\Omega }\) and \(\delta _{\Omega }^*\), such that
The inverse of transformation (3.1) is given by \(\xi =\xi (x,y)\) and \(\eta =\eta (x,y)\). Their explicit expressions were given in Appendix of [16], which are irrational functions generally. The Jacobi matrix of the above inverse transformation is
Thanks to (3.5), we have
Let \(x_5=x_1\) and \(y_5=y_1\). We set
Due to (3.2), we have (see [16])
On the other hand, thanks to the Poincaré inequality, there exists a positive constant \(c_\Omega \) such that
Let \(d\) be a non-negative constant as before. By virtue of the property of elliptic equation, there exists a positive constant \(\eta _{\Omega }\) such that
3.2 Legendre Irrational Orthogonal Approximation in \(H^2_0(\Omega )\)
For any integer \(r\ge 0\), we define the weighted Sobolev spaces \(H^r_\chi (\Omega )\) as usual, with the semi-norm \(|v|_{r,\chi ,\Omega }\) and the norm \(\Vert v\Vert _{r,\chi ,\Omega }\). The inner product and the norm of \(L^2_\chi (\Omega )\) are denoted by \((u,v)_{\chi ,\Omega }\) and \(||v||_{\chi ,\Omega }\), respectively. We omit the subscript \(\chi \) whenever \(\chi (\xi )\equiv 1\).
We shall use the following family of irrational functions given in [16],
which are mutually orthogonal with the weight function \(J^{-1}_{\Omega }(\xi (x,y),\eta (x,y))\). Moreover,
We introduce the bilinear form with \(d\ge 0\),
The orthogonal projection \(P^{2,0}_{N,\Omega }:H^2_0(\Omega )\rightarrow V^0_N(\Omega )\), is defined by
For description of approximation error, we shall use the quantity \(B_{r,\Omega }(v)\). \(B_{r,\Omega }(v)=\delta _\Omega ^{-\frac{1}{2}}\sum _{j=1}^r\sigma _\Omega ^{j}|v|_{j,\Omega }\) for \(r=2,3\). Meanwhile \(B_{r,\Omega }(v)=\sum _{j=1}^5B_{r,\Omega }^{(j)}(v)\) for \(r\ge 4\), with
For notational convenience, we also set
Theorem 3.1
If \(v\in H^2_0(\Omega )\) and \(B_{r,\Omega }(v)\) is finite for integer \(2\le r\le N+1\) and \(N\ge 2\), then
Proof
For any \(v\in H^2_0(\Omega )\), we set \(u(\xi ,\eta )=v(x(\xi ,\eta ),y(\xi ,\eta ))\in H^2_0(S)\). Let
Since \(\phi \in V^0_N(\Omega )\), we use projection theorem and (3.10) to obtain that
For estimating the right side of (3.16), we need some preparations. Firstly, a direct calculation shows that
Next, by virtue of (3.6), we have that
Thanks to (3.4), we have \(\partial _\xi J_\Omega (\xi ,\eta )=a_1b_3-a_3b_1\) and \( \partial _\eta J_\Omega (\xi ,\eta )=a_3b_2-a_2b_3\). Thus,
The above facts lead to that
Accordingly, we use (3.15) and (3.17)–(3.19) to deduce that
The above equality, together with (3.7)- (3.9), leads to
We can estimate \(\Vert \partial ^2_x(\phi -v)\Vert ^2\) and \(\Vert \partial _x\partial _y(\phi -v)\Vert ^2\) in the same manner. Consequently, we use (3.16) and Theorem 2.1 to reach that
We next estimate the up-bound of \(D_{r,S}(v)\). By (3.13) and (3.14) of [24], we know that
Furthermore, we have from (3.3) that
Thereby, we differentiate the two equalities of (3.21) to obtain that
Similarly, we derive that
Now, we use (3.21) and (3.7)–(3.9) to verify that
Next, we use (3.22) and (3.7)–(3.9) to derive that
Similarly, we use (3.23) and (3.7)–(3.9) to obtain that
A combination of (3.24)–(3.26) implies
Moreover, according to the definitions of \(D_{r,S}(u)\) and \(B_{r,\Omega }(v)\), we use (3.21)–(3.23) to find that the inequality (3.27) is also valid for \(r=2,3\). Consequently, we use (3.20) and (3.10) to reach that for \(r\ge 2\),
This is the desired result (3.14) with \(\mu =2\).
We are now in position of deriving the optimal estimate for \(||P_{N,\Omega }^{2,0}v-v||_{\Omega }\). Let \(g\in L^2(\Omega )\) and consider an auxiliary problem. It is to find \(w\in H^2_0(\Omega )\) such that
By taking \(z=P^{2,0}_{N,\Omega } v-v\) in (3.29), we use (3.13), (3.10) and the second equality of (3.28) successively to verify that
Furthermore, the Eq. (3.29) implies \(\Delta ^2 w+dw=g\) in sense of distribution. Thus, due to (3.11), we assert that
Consequently, we use (3.30) and (3.31) to deduce that for \(r\ge 2\),
Finally, we use the interpolation of spaces to derive that
The proof is completed. \(\square \)
Remark 3.1
In the norms involved in the error estimations (3.14), there are some weight functions which tend to zero as the points go to the corners of domain. It is useful for covering certain singularities of the approximated functions and their derivatives at the corners.
3.3 Other Legendre Irrational Orthogonal Approximations
We consider other Legendre irrational orthogonal approximations. For example, we set
According to the Poincaré inequality, there exists a positive constant, which is denoted by \(c_\Omega \) also, such that
Let \(d,\beta \ge 0\), and
We define the operator \({}^0P^{2}_{N,\Omega }:{}^0H^2(\Omega )\rightarrow {}^0V_N(\Omega )\), by
It can be shown that
Let \(u(\xi ,\eta )=v(x(\xi ,\eta ),y(\xi ,\eta )),\,\psi (\xi ,\eta )=P^{2,0}_{N,S}u(\xi ,\eta )\) and \( \phi (x,y)=\psi (\xi (x,y),\eta (x,y))\) in the above inequality. Then, with the aid of (3.32), the trace theorem and Theorem 2.2, we could follow the same line as in the proof of Theorem 3.1 to reach the following result.
Theorem 3.2
If \(v\in {}^0H^2(\Omega )\) and \(B_{r,\Omega }(v)\) is finite for integer \(2\le r\le N+1\) and \(N\ge 2\), then
4 Spectral Method for Fourth-Order Problems
In this section, we propose the spectral method for fourth-order problems defined on quadrilaterals.
Let \(\partial \Omega =\overline{\partial ^*\Omega \cup \partial ^{**}\Omega },\partial ^*\Omega \cap \partial ^{**}\Omega =\emptyset \) and \(d, \beta \) be non-negative constants. We consider the following model problem,
If \(\partial ^*\Omega =\partial \Omega \), then the above problem is a Dirichlet boundary value problem. Otherwise, it is a mixed inhomogeneous boundary value problem. In this case, if \(\partial ^{**}\Omega =\partial \Omega \) and \(d=\beta =0\), then we require the following additional condition for ensuring the existence of solution,
4.1 Dirichlet Boundary Value Problems
We first consider the homogeneous Dirichlet boundary value problems, namely, \(\partial ^*\Omega =\partial \Omega \) and \(G_0(x,y)=G_1(x,y)\equiv 0\). Let \(a_d(u,v)\) be the same as in (3.12). The weak form of problem (4.1) is to seek the solution \(U\in H^2_0(\Omega )\) such that
The Legendre irrational spectral scheme for solving (4.2) is to find \(u_N\in V^0_N(\Omega )\) such that
We now estimate the error of numerical solution. Let \(P^{2,0}_{N,\Omega }U \) be the same as in (3.13). Then
Subtracting the above equality from (4.3), we obtain
Taking \(\phi =u_N-P^{2,0}_{N,\Omega }U\) in (4.4), we find that \(\Delta (u_N-P^{2,0}_{N,\Omega }U)\equiv 0\) in \(\Omega \). Since \(u_N-P^{2,0}_{N,\Omega }U= 0\) on \(\partial \Omega \), we assert that \(u_N-P^{2,0}_{N,\Omega }U\equiv 0\) on \(\bar{\Omega }\), i.e., \(u_N=P^{2,0}_{N,\Omega }U\). Finally, we use Theorem 3.1 to conclude that
Remark 4.1
In the norms involved in the above estimations, there are some weight functions which tend to zero as the points go to the corners of domain. It is useful for covering certain singularities of the exact solutions and their derivatives at the corners.
We next describe the numerical implementations and present some numerical results confirming the analysis in the last section. To do this, let \(L_l(\xi )(-1\le l\le 1)\) be the standard Legendre polynomials as before, and
Obviously \(\phi _l(\pm 1)=\partial _\xi \phi _l(\pm 1)=0\). Therefore, all of the functions \(\phi _l(\xi (x,y))\phi _m(\eta (x,y)) (0\le l,m \le N-4)\) conform the basis of \(V^0_N(\Omega )\). In actual computations, we expand the numerical solution of (4.3) as
By inserting the above expression into (4.3), we obtain a linear system of algebraic equations with the unknown coefficients \(a_{l,m}\).
Let \(\xi _{N,l}~(0\le l\le N)\) be the zeros of the Legendre polynomial \(L_{N+1}(\xi )\). Meanwhile, \(\omega _{N,l}\,(0\le l\le N)\) stand for the Christoffel numbers of the Legendre–Gauss interpolation. Moreover, \(x_{N,l,m}=x(\xi _{N,l},\eta _{N,m})\) and \(y_{N,l,m}=y(\xi _{N,l},\eta _{N,m})\). We measure the errors of numerical solutions by the discrete average norm
and the discrete maximum norm
We first use (4.3) to solve (4.2) with \(d=1\) and \(\beta =0\). We take the domain \(\Omega =\Omega ^{(1)}\) with the vertices \(Q_1=(-\frac{\sqrt{2}}{2},-\frac{\sqrt{2}}{2})\), \(Q_2=(\frac{\sqrt{6}}{2},-\frac{\sqrt{6}}{2})\), \(Q_3=(\frac{\sqrt{2}}{2},\frac{\sqrt{2}}{2})\) and \(Q_4=(-\frac{\sqrt{2}}{2},\frac{\sqrt{2}}{2})\). The smallest angle \(\theta _2=\frac{\pi }{3}\), and the two largest angles \(\theta _1=\theta _3=\frac{7}{12}\pi \). The equations of the four edges of \(\Omega ^{(1)}\) are as follows,
-
\(L_1: l_1(x,y)=x+\frac{\sqrt{2}}{2}=0\),
-
\(L_2: l_2(x,y)=(\sqrt{3}-2)x-y-\frac{3\sqrt{2}}{2}+\frac{\sqrt{6}}{2}=0\),
-
\(L_3: l_3(x,y)=(\sqrt{3}+2)x+y-\frac{3\sqrt{2}}{2}-\frac{\sqrt{6}}{2}=0\),
-
\(L_4: l_4(x,y)=y-\frac{\sqrt{2}}{2}=0\).
We take the following test function,
Clearly, \(U(x,y)\in H^2_0(\Omega )\). In Table 1, we list the discrete errors \(E_{ave,N}\) and \(E_{max,N}\) versus the mode \(N\). They demonstrate that the numerical errors decay rapidly as \(N\) increases. This confirms the analysis.
We next use (4.3) to solve (4.2) with \(d=1\) and \(\beta =0\), defined on the domain \(\Omega =\Omega ^{(2)}\) with the vertices \(Q_1=(-\frac{\sqrt{2}}{2},-\frac{\sqrt{2}}{2})\), \(Q_2=(\sqrt{2}+\frac{\sqrt{6}}{2},-\sqrt{2}-\frac{\sqrt{6}}{2})\), \(Q_3=(\frac{\sqrt{2}}{2},\frac{\sqrt{2}}{2})\) and \(Q_4=(-\frac{\sqrt{2}}{2},\frac{\sqrt{2}}{2})\). The smallest angle \(\theta _2=\frac{\pi }{6}\), and the largest angles \(\theta _1=\theta _3=\frac{2\pi }{3}\). The equations of the four edges of \(\Omega ^{(2)}\) are as follows,
-
\(L_1: l_1(x,y)=x+\frac{\sqrt{2}}{2}=0\),
-
\(L_2: l_2(x,y)=-\frac{\sqrt{3}}{3}x-y-\frac{\sqrt{6}}{6}-\frac{\sqrt{2}}{2}=0\),
-
\(L_3: l_3(x,y)=-\sqrt{3}x-y+\frac{\sqrt{6}}{2}+\frac{\sqrt{2}}{2}=0\),
-
\(L_4: l_4(x,y)=y-\frac{\sqrt{2}}{2}=0\).
The test function is given by (4.6) with the above new functions \(l_i(x,y), 1\le i\le 4\). In Table 2, we list the discrete errors \(E_{ave,N}\) and \(E_{max,N}\) versus the mode \(N\). They also demonstrate that the numerical errors decay rapidly as \(N\) increases. By comparing Table 1 with Table 2, we find that the numerical errors depend on the quantity \(\min _{1\le i\le 4}( \theta _i, \pi -\theta _i)\). Indeed, the bigger this quantity, the smaller the numerical errors.
4.2 Mixed Boundary Value Problems
In this subsection, we consider mixed boundary value problems. For fixedness, let \(\partial ^{*}\Omega =L_1\cup L_4, \) and \(\partial ^{**}\Omega =L_2\cup L_3\). Moreover, \(G_0(x,y)\equiv 0\) on \(\Omega \), and \(G_1(x,y)\equiv 0\) on \( \partial ^{*}\Omega \). The space \({}^0H^2(\Omega )\) and the set \( {}^0V_N(\Omega )\) are the same as in Sect. 3.3. Let \(a_{d,\beta }(u,v)\) be the same as in (3.33). The weak formulation of (4.1) is to seek solution \(U\in {}^0H^2(\Omega )\) such that
The Legendre irrational spectral scheme for solving (4.7) is to find \(u_N\in {}^0V_N(\Omega )\) such that
Let \({}^0P^2_{N,\Omega }U\) be the same as in (3.34). Then
By subtracting the above equality from (4.8), we obtain
Taking \(\phi =u_N-{}^0P^2_{N,\Omega }U\) in (4.9), we find that \(\Delta (u_N-{}^0P^2_{N,\Omega }U)\equiv 0\) in \(\Omega \). Since \(u_N-{}^0P^2_{N,\Omega }U= 0\) on \(\partial \Omega \), we derive that \(u_N={}^0P^2_{N,\Omega }U\). Finally, we use Theorem 3.2 to obtain
We now present some numerical results. Let \(\phi _l(\xi )\) be the same as in the last subsection, and
It was shown in [21] that \( h_-(\pm 1)=h_+(\pm 1)=\partial _\xi h_-(1)=\partial _\xi h_+(-1)=0\). Thus, all \(\phi _l(\xi (x,y))\phi _m(\eta (x,y))\), \( \phi _l(\xi (x,y))h_-(\eta (x,y)),h_+(\xi (x,y))\phi _l(\eta (x,y))~(0\le l,m \le N-4) \) and \(h_+(\xi (x,y))h_-(\eta (x,y))\) conform the basis of \({}^0V_N(\Omega )\). In actual computations, we expand the numerical solution of (4.8) as
By inserting the above expression into (4.8), we obtain a linear system of algebraic equations with the unknown coefficients \(a_{l,m},b_l,c_l\) and \(q\).
We now use (4.8) to solve (4.7) with \(d=1\) and \(\beta =0\), defined on the domain \(\Omega =\Omega ^{(1)}\). The test function is
Clearly, \(U\in {}^0H^2(\Omega )\). In Table 3, we list the discrete errors \(E_{ave,N}\) and \(E_{max,N}\) versus the mode \(N\). They show the rapid convergence of scheme (4.8).
We next use (4.8) to solve (4.7) with \(d=1\) and \(\beta =0\), defined on the domain \(\Omega =\Omega ^{(2)}\). The test function is given by (4.11), with the functions \(l_i(x,y), 1\le i\le 4\), which correspond to the domain \(\Omega ^{(2)}\) as before. In Table 4, we list the discrete errors \(E_{ave,N}\) and \(E_{max,N}\) versus the mode \(N\). They also show the rapid convergence of scheme (4.8). By comparing Table 3 with Table 4, we observe again that the numerical errors depend on the quantity \(\min _{1\le i\le 4}( \theta _i, \pi -\theta _i)\).
In the error estimates (4.5) and (4.10), there exist the weights vanishing on some parts of the edges. It would be useful to cover certain weak singular behaviors at the edges or vertices. To show this, we use (4.8) to solve (4.7) with \(d=1\) and \(\beta =0\), defined on the domain \(\Omega =\Omega ^{(1)}\) as before. We take the test function as
where \(\rho (x,y)=\sqrt{\left( x-\frac{\sqrt{6}}{2}\right) ^2+\left( y+\frac{\sqrt{6}}{2}\right) ^2}\) and \(\gamma >0\). Clearly, the singularities of \(U(x,y)\) occur at the vertices \(Q_2\left( \frac{\sqrt{6}}{2},-\frac{\sqrt{6}}{2}\right) \), except that \(\gamma \) is an even number. Also, \(U\in {}^0H^2(\Omega )\cap H^{3+\gamma -\omega }(\Omega )\) with arbitrary \(\omega >0\).
In Tables 5, 6 and 7, we list the discrete errors \(E_{ave,N}\) and \(E_{max,N}\) versus the mode \(N\) with \(\gamma =1,~3,~5\), respectively. We see that for the same modes \(N\), the numerical results with bigger \(\gamma \) are more accurate than those with smaller \(\gamma \). More precisely, since \(U\in H^{2+\gamma }(\Omega )\), we obtain from (4.10) that the numerical errors are of the order \(N^{-\gamma }\). Therefore, as indicated by Tables 5, 6 and 7, the numerical errors with bigger \(\gamma \) decrease faster than those with small \(\gamma \).
4.3 Inhomogeneous Boundary Value Problems
We now turn to problem (4.1) with \(G_0(x,y)\not \equiv 0\) and \(G_1(x,y)\not \equiv 0\). According to the lifting, there exists the function \({\widetilde{U}}(x,y)\) such that \({\widetilde{U}}(x,y)=G_0(x,y)\) on \(\partial \Omega \), and \(\partial _n {\widetilde{U}}(x,y)=G_1(x,y)\) on \(\partial ^{*}\Omega \). We make the following variable transformation,
Then, the problem (4.1) is reformulated to
We can solve this alternative problem numerically by the methods proposed in Sects. 4.1 or 4.2. Its numerical solution is denoted by \(w_N(x,y)\). The numerical solution of the original problem is given by \(u_N(x,y)=W_N(x,y)+{\widetilde{U}}(x,y)\).
The key point is how to construct the lifting function \({\widetilde{U}}(x,y)\). This is a difficult and open problem for fourth-order problem. Fortunately, we solve this problem, see “Appendix” of this paper.
We now present some numerical results. We consider the inhomogeneous Dirichlet boundary value problem (4.1) with \(d=1\) and \(\beta =0\), define on the quadrilaterals \(\Omega =\Omega ^{(3)}\) with the vertices \(Q_1=(0,0),\, Q_2=(2,0),\, Q_3=(1,1)\) and \(Q_4=(0,1)\). We take the following test function,
Clearly, \(U\in H^2(\Omega )\), and \(U\) possesses inhomogeneous boundary condition on \(\partial \Omega \). We list the discrete errors \(E_{ave,N}\) and \(E_{max,N}\) versus the mode \(N\) in Table 8. They show the rapid convergence of spectral scheme.
5 Concluding Remarks
In this paper, we proposed the spectral method for fourth-order problems defined on quadrilaterals. We provided the spectral schemes for a model problem with Dirichlet boundary condition and mixed boundary condition, and proved their spectral accuracy. We also developed the lifting technique, by which we could deal with inhomogeneous boundary value problems reasonably. Numerical results demonstrated the high effectiveness of the suggested algorithms. As the mathematical foundation of our new spectral method, we introduced the orthogonal irrational approximation defined on quadrilaterals, and established the basic approximation results, which plays an essential role in designing and analyzing the related spectral method. The approximation results and techniques developed in this paper are also applicable to other fourth-order problems defined on quadrilaterals.
As we know, Guo and Jia [16] first proposed the spectral element method for second-order problems defined on quadrilateral arbitrary polygons with quadrilateral partition, while Yu and Guo [29] investigated the spectral element method for fourth-order problems with rectangle partition of domains. An important problem is how to generalize the approach of this work to fourth-order problems with quadrilateral partition of domains. Like conforming finite element method, the main difficulty of designing such method is how to ensure the continuity of the derivatives of numerical solutions at all common edges of adjacent elements. It seems hopeful to solve this problem by using the quasi orthogonal approximation similar to the work of [16], coupled with the lifting technique presented in “Appendix” of this paper. We shall report the related results in the future.
References
Belhachmi, Z., Bernardi, C., Karageorghis, A.: Spectral element discretization of the circular driven cavity, part II: the bilaplacian equation. SIAM J. Numer. Anal. 38, 1926–1960 (2001)
Bernardi, C., Maday, Y.: Spectral methods. In: Ciarlet, P.G., Lions, J.L. (eds.) Handbook of Numerical Analysis, pp. 209–486. Elsevier, Amsterdam (1997)
Bernardi, C., Maday, Y., Rapetti, F.: Discretisations Variationnelles de Problemes aux Limites Elliptique, Collection: Mathematique et Applications, vol. 45. Springer, Berlin (2004)
Bert, C.W.: Nonlinear vibration of a rectangular plate arbitrary laminated of anisotropic materials. J. Appl. Mech. 40, 425–458 (1973)
Bialecki, B., Karageorghis, A.: A Legendre spectral Galerkin method for the biharmonic Dirichlet problem. SIAM J. Sci. Comput. 22, 1549–1569 (2000)
Bjørstad, P.E., Tjøstheim, B.P.: Efficient algorithms for solving a fourth-order equation with spectral-Galerkin method. SIAM J. Sci. Comput 18, 621–632 (1997)
Brenner, S.C., Scott, L.R.: The Mathematical Theory of Finite Element Methods, 3rd edn. Springer, Berlin (2008)
Canuto, C., Hussaini, M.Y., Quarteroni, A., Zang, T.A.: Spectral Methods. Springer, Berlin (2006)
Canuto, C., Hussaini, M.Y., Quarteroni, A., Zang, T.A.: Spectral Methods: Evolution to complex Geometries and Applications to Fluid Dynamics. Springer, Berlin (2007)
Chia, C.Y.: Nonlinear Analysis of Plates. McGraw-Hill, New York (1980)
Doha, E.H., Bhrawy, A.H.: Efficient spectral-Galerkin algorithms for direct solution of fourth-order differential equations using Jacobi polynomials. Appl. Numer. Math. 58, 1224–1244 (2008)
Funaro, D.: Polynomial Approxiamtions of Differential Equations. Springer, Berlin (1992)
Guo, B.-Y.: Spectral Methods and Their Applications. World Scientific, Singapore (1998)
Guo, B.-Y.: Jacobi approximations in certain Hilbert spaces and their applications to singular differential equations. J. Math. Anal. Appl. 243, 373–408 (2000)
Guo, B.-Y.: Some progress in spectral methods. Sci. China Math. 56, 2411–2438 (2013)
Guo, B.-Y., Jia, H.-L.: Spectral method on quadrilaterals. Math. Comput. 79, 2237–2264 (2010)
Guo, B.-Y., Shen, J., Wang, L.-L.: Optimal spectral-Galerkin methods using generalized Jacobi polynomials. J. Sci. Comput. 27, 305–322 (2006)
Guo, B.-Y., Sun, T., Zhang, C.: Jacobi and Laguerre quasi-orthogonal approximations and related interpolations. Math. Comput. 82, 413–441 (2013)
Guo, B.-Y., Wang, L.-L.: Jacobi approximations in non-uniformly Jacobi-weighted Sobolev spaces. J. Approx. Theory 128, 1–41 (2004)
Guo, B.-Y., Wang, L.-L.: Error analysis of spectral method on a triangle. Adv. Comput. Math. 26, 473–496 (2007)
Guo, B.-Y., Wang, T.-J.: Composite Laguerre-Legendre spectral method for fourth-order exterior problems. J. Sci. Comput. 44, 255–285 (2010)
Guo, B.-Y., Wang, Z.-Q., Wan, Z.-S., Chu, D.-L.: Second order Jacobi approximation with applications to fourth-order differential equations. Appl. Numer. Math. 55, 480–520 (2005)
Harras, B., Benamar, R., White, R.G.: Investigation of nonlinear free vibrations of fully clamped symmetrically laminated carbon-fibre-reinforced PEEK(AS4/APC2) rectangular composite panels. Compos. Sci. Technol. 62, 719–727 (2002)
Jia, H.-L., Guo, B.-Y.: Petrov–Galerkin spectral element method for mixed inhomogeneous boundary value problems on polygons. Chin. Ann. Math. 31B, 855–878 (2010)
Karniadakis, G.E., Sherwin, S.J.: Spectral/hp Element Methods for CFD, 2nd edn. Oxford University Press, Oxford (2005)
Narita, Y.: Combinations for the free-vibration behaviors of anisotropic rectangular plates under general edge conditions. J. Appl. Mech. 67, 568–573 (2000)
Reddy, J.N.: A simply higher-order theory for laminated composite plates. J. Appl. Mech. 51, 745–754 (1984)
Shen, J., Tang, T., Wang, L.-L.: Spectral Methods: Algorithms, Analysis and Applications. Springer, Berlin (2011)
Yu, X.-H., Guo, B.-Y.: Spectral element method for mixed inhomogeneous boundary value problems of fourth order. J. Sci. Comput. 61, 673–701 (2014)
Acknowledgments
We thank professor Hu Jun of Peking University for helpful discussions.
Author information
Authors and Affiliations
Corresponding author
Additional information
This work is supported in part by NSF of China N.11171227 and N.11426155, Fund for Doctoral Authority of China N.20123127110001, Fund for E-institute of Shanghai Universities N.E03004, Leading Academic Discipline Project of Shanghai Municipal Education Commission N.J50101, and the Hujiang Foundation of China (B14005).
Appendix
Appendix
This appendix is devoted to the lifting technique. The edges \(L_i\) of domain \(\Omega \) are as follows (see Fig. 1),
Let \(l_{i+4}(x,y)=l_i(x,y),~i=1,2,3,4\). We could rewrite the equations corresponding to the edges as \(x=x_i(y)\) for \(L_i,i=1,3\), and \(y=y_i(x)\) for \(L_i,i=2,4\). Clearly,
We denote the normal vector of edges \(L_i\) by \(n_i=(\cos \alpha _i,\cos \beta _i)^T,~1\le i\le 4\). Besides, \(Q_i\) stand for the four corners of domain \(\Omega \) as in Fig. 1.
Our aim is to design the lifting function \(v_b(x,y)\) such that
where \(g_i(y),h_i(y) (i=1,3)\) and \(g_i(x),h_i(x)(i=2,4)\) are given functions. In addition, the functions \(g_i(y)\) and \(g_i(x)\) fulfill certain consistent conditions ensuring the continuity of \(v_b(x,y)\) at the corners of domain.
In the forthcoming discussions, we introduce the following polynomials,
It can be checked that
We also introduce the following polynomials,
It can be verified that
We can also verify that \(\sigma _{ij}(x,y),2\le i,j\le 4\) have the same properties. Accordingly, we design the desired lifting function \(v_b(x,y)\) satisfying (A.3) as follows,
where \(\widetilde{g}_i,\widetilde{h}_i\) and \(p_{ij}, 1\le i,j\le 4\) are undetermined functions and constants. We shall construct those undetermined quantities properly in the following four steps.
Step 1 According to (A.3), we use (A.5) and (A.7) to derive that
Furthermore, the corner \(Q_1=L_1\cap L_2\). Thus we know from (A.5) and (A.7) that
Therefore
In other words,
Due to the continuity of \(v_b(x,y)\), we have \(g_1(y)|_{Q_1}=g_2(x)|_{Q_1}\). Thereby, the above expression is meaningful and so determines the constant \(p_{11}\). In the same manner, we can calculate the constants \(p_{i1},\,i=2,3,4\).
Step 2 For simplicity, let \(\partial _x s_1(x_1(y),y)=\partial _x s_1(x,y)|_{x=x_1(y)}\), etc. By differentiating the two equations of (A.9), we derive that
Moreover, we know from (A.5) and (A.7) that at the corner \(Q_1\),
Therefore
Consequently,
These expressions with (A.10) determine the constants \(p_{12}\) and \(p_{13}\). We can calculate the \(p_{i2}\) and \(p_{i3},~i=2,3,4\) in the same way.
Furthermore, we obtain from the first equation of (A.9) that
Since \(p_{ij},\,1\le i\le 4,1\le j\le 3\) are given already by (A.10) and (A.13), the above expressions determine the functions \(\widetilde{g}_1(y)\). We also can determine the functions \(\widetilde{g}_2(x),\widetilde{g}_3(y)\) and \(\widetilde{g}_4(x)\).
Step 3 According to (A.3), we use (A.5) and (A.7) to derive that
Then, we have
Moreover, due to \(g_1(y)=u(x_1(y),y),~g_4=u(x,y_4(x))\) and (A.4), we find that
From the first equation of (A.15) and (A.16), we have
From the second equation of (A.15) and (A.16), we have
Then, we obtain the compatibility conditions as \(\partial _{xy}u(x,y)|_{Q_1}=\frac{A_{Q_1}}{B_{Q_1}}=\frac{C_{Q_1}}{D_{Q_1}}\).
Next, by differentiating the (A.8) twice, we derive that
Moreover, we know form (A.5) and (A.7) that
Therefore,
Consequently,
In the same manner, we can determine the constants \(p_{i4},~1\le i\le 4\).
Step 4 According to (A.3), we use (A.5) and (A.7) to derive that
Moreover, with the aid of (A.5), we deduce that
By substituting the above equality into (A.20), we obtain
which determines the function \(\widetilde{h}_1(y)\).
In the same way, we can determine the functions \(\widetilde{h}_2(x),\,\widetilde{h}_3(y)\) and \(\widetilde{h}_4(x)\).
Finally, a combination of (A.10), (A.13), (A.14), (A.19) and (A.21) leads to the desired lifting function (A.8).
Remark 5.1
We can construct the lifting function for the boundary condition corresponding to the mixed inhomogeneous boundary value problems of fourth order.
Rights and permissions
About this article

Cite this article
Yu, Xh., Guo, By. Spectral Method for Fourth-Order Problems on Quadrilaterals. J Sci Comput 66, 477–503 (2016). https://doi.org/10.1007/s10915-015-0031-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10915-015-0031-6
Keywords
- Orthogonal approximation on quadrilaterals
- Spectral method for fourth-order problems
- Mixed boundary value problems