
Abstract
This paper considers a generalized (2+1) dimensional nonlinear evolution equation depending on two nonzero arbitrary constants. We derive the Lie point symmetry generators and Lie symmetry groups. This symmetry analysis leads us the reductions equations, through one of which we obtain solutions. We also get the low-order conservation laws of the equation that have been obtained using the corresponding symmetries of the family. We will present a classification of conservation laws for this equation and we will apply Lie symmetry analysis to the equation in order to obtain exact solutions.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Studies on nonlinear partial differential equations are significant because these equations describe multiple behaviours in various sciences such as fluid dynamics, chemistry, condensed matter, biophysics, plasma physics, biogenetics, optical fibers, biology and other areas of engineering. Several methods have been developed to find exact solutions of nonlinear partial differential equations such as the symmetry methods [2, 3, 4, 17], the homogeneous balance method [25], the sine–cosine method [21], the hyperbolic tangent method [12], sub-equation method [13], multiple exp-function method [11], the non-clasical method [3], the variational principle, the simple-equation method [7, 8] and others methods.
The Lie group method or symmetry analysis is one of the most efficient methods of studying differential equations. A symmetry group of a system of differential equations transforms solutions of the system to other solutions. Once one has determined the symmetry group of a system of differential equations, a number of applications become available.
In this paper, we consider a generalized (2+1)-dimensional nonlinear evolution equation given by
with a and b nonzero arbitrary constants. For \(a=4\) and \(b=4\) we obtain the (2+1)-dimensional Bogoyavlenskii’s breaking soliton equation
For \(a=4\) and \(b=2\) derive in the (2+1)-dimensional Calogero–Bogoyavlenski–Schif equation
which is an well-known nonlinear evolution equation in mathematical physics and have been paid attention by a lot of researchers.
Some special cases of (1) have been studied by several authors [1, 16, 20]. In [20] the authors applied the multiple exp-function to Eq. (1), defining solvable differential equations, transforming nonlinear PDEs and solve algebraic systems. Also in [1] the modified simple equation method is applied using a the nonlinear evolution equation.
The study of nonlinear evolution equations is of great importance in the theory of solitary waves [22], which appear in many scientific and engineering fields with application in physical and chemical processes [15, 23, 24]. The (2+1)-dimensional Burgers equation
where a and b are constants that define the kinematic viscosities, is a nonlinear evolution equation that incorporates both convection terms \(uu_x\) and \(uu_y\) and dissipation terms \(u_{xx}\) and \(u_{yy}\).
The (2+1)-dimensional Kadomtsev–Petviashvili–Burgers equation
where a and b are constants, is a nonlinear equation derived from nonlinear wave models of fluid in an elastic tube, liquid with small bubbles and turbulence and it describes for the dust acoustic waves in dusty plasmas.
This paper is organized as follows: In the first section we perform a study of Lie symmetries of a generalized \((2+1)\)-dimensional nonlinear evolution equation and we establish our main results about it. We deal the point symmetries clasification and the commutators table of Lie algebra. In Sect. 2, we employ the similarity variable and similarity solution to obtain symmetry reductions [6, 18], we reduce the generalized (2+1)-dimensional equation to partial differential equations and ordinary differential equations, some of them with exact solutions. In the following section, by using the generators calculated previously, we study the Lie symmetry groups with new solutions [9, 10, 26] that we obtain using these groups. Finally, the low-order local conservation laws [5, 14, 19] admitted by (1) on the whole solution space will be presented in Sect. 4.
2 Lie symmetries
According to the Lie theory, to obtain Lie symmetries of the generalized (2+1)-dimensional nonlinear evolution Eq. (1), we consider a one-parameter Lie group of infinitesimal transformations acting on independent and dependent variables
where \(\varepsilon\) is the group parameter and \(\tau ,\)\(\xi _1\), \(\xi _2\) and \(\eta\) are the infinitesimal of the transformations for the independent and dependent variables respectively.The infinitesimal generator V associated with the group of transformations can be written by
where
The solutions space of (1) is invariant under the point transformation group (2) provided the invariance condition
where \(\Delta =u_{tx} + a u_x u_{xy} + b u_{xx} u_y + u_{xxxy}\) and \(pr^{(4)}V\) is the fourth prolongation of the vector field (3)
where
with \(J=(j_1,\ldots ,j_k), 1\le j_k\le 3\) and \(1\le k\le 4.\)
2.1 Point symmetries clasification
A point symmetry of the generalized (2+1)-dimensional nonlinear evolution Eq. (1) is a one-parameter Lie group of transformations on (t, x, y, u) generated by a vector field of the form (3), whose prolongation leaves invariant Eq. (1).
The condition for a vector field (3) to generate a point symmetry of Eq. (1) is given by (4), that splits with respect to the x, y and t derivatives of u giving an overdetermined linear system of equations for the infinitesimals \(\tau (t,x,y,u),\,\)\(\xi _1(t,x,y,u),\,\)\(\xi _2(t,x,y,u)\) y \(\eta (t,x,y,u)\) and the parameters a, b. Solving this system we obtain the next theorem:
Theorem 1
(Point Symmetries Classification Theorem:) The point symmetries admitted by Eq. (1) are generated by:
- 1.
In the case\(a\ne 2b\), the generators
$$\begin{aligned} V_1&= {} \partial _t,\quad V_2=\partial _x, \quad V_3=\partial _y,\quad V_4=t\partial _t+y\partial _y ,\nonumber \\ V_5&= {} -2t\partial _t-x\partial _x+u\partial _u,\quad V_6=a t\partial _y+x\partial _u ,\nonumber \\ V_{1,F_1(t)}&= {} F_1(t)\partial _u, \quad V_{2,F_2(t)}=F_2(t) b \partial _x+F'_2(t) y\partial _u \end{aligned}$$(7) - 2.
In the case\(a=2b\), the generators
$$\begin{aligned} V_1&= {} \partial _t,\quad V_2=\partial _x, \quad V_3=\partial _y,\quad V_4=t\partial _t+y\partial _y ,\nonumber \\ V_5&= {} -2t\partial _t-x\partial _x+u\partial _u,\quad V_6=2b t\partial _y+x\partial _u ,\nonumber \\ V_7&= {} 2bt^2\partial _t+bt\partial _x+2bty\partial _y+(xy-btu)\partial _u\nonumber \\ V_{1,F_1(t)}&= {} F_1(t)\partial _u, \quad V_{2,F_2(t)}=F_2(t) b \partial _x+F'_2(t) y\partial _u \end{aligned}$$(8)
Proof
The condition (4) leads to a linear system of determining equations. When \(a\ne 2b\), by simplifying the system, we obtain
and in the case \(a=2b\), we obtain
The solutions of systems (9) and (10) lead the generators obtained in both cases. \(\square\)
2.2 Commutator table of Lie algebra
It is easy to check that the vector field in the general case (7) and in the case \(a=2b\) (8) , are closed under the Lie bracket. Thus the symmetry generators form a closed Lie algebra. The commutation relationships of Lie algebras determined by the symmetry generators (7) and (8) are shown in Table 1, where
and \([V_i,V_j]\) is the commutator for the Lie algebra defined by
Then we build the adjoint table for each pair of elements \(V_i\) and \(V_j\), with \(i,j = 1,\ldots ,7\), where
We will use the adjoint representation to decompose all the subalgebras of the Lie algebra in equivalence classes of conjugated subalgebras. From the action attached infinitesimal of a Lie algebra over itself, we can rebuild the adjoint representation to the underlying Lie group adding the Lie series (Table 2).
We use now elements of the optimal system of subalgebras to calculate the reductions of the Eq. (1). An optimal system of subalgebras is a list of subalgebras that are not equivalent or conjugated. Also, any other subalgebra of the Lie algebra is conjugated or equivalent whith it. The generators of the optimal one-dimensional system when \(a\ne 2b\) are given by: \(\lambda _1V_1+\lambda _2V_2+\lambda _3V_3, \, \lambda V_2+V_4,\, \lambda V_3+V_5, \,\lambda _1V_2+\lambda _2V_4+V_6\) and \(V_4\pm V_5\). When \(a=2b\) the optimal system is given by: \(\lambda V_3+V_5, \,V_4\pm V_5,\, \lambda _1V_2+\lambda _2V_2+V_7\) and \(\lambda _1V_2+\lambda _2V_4+V_6\).
3 Symmetry reductions
In this section, we mainly use the optimal system of one-dimensional subalgebras computed in the previous subsection and obtain symmetry reductions of the generalized (2+1)-dimensional nonlinear evolution equation.
Reduction 1 By using the generator \(\lambda V_{2}+V_{4}\), we obtain the similarity variables and similarity solution
and the PDE \(E_1\)
Reduction 2 By using the generator \(V_1+V_{2,F_2(t)}\) we obtain the similarity variables and similarity solution
and the PDE \(E_2\)
Reduction 3 By using the generator \(V_{7}\) in the case \(a=2b,\) we obtain the similarity variables and similarity solution
and the PDE \(E_3\)
Reduction 4 By using the generator \(\lambda V_2+V_4+V_6\) we obtain the similarity variables and similarity solution
and the PDE \(E_4\)
Reduction 5 By using the generator \(\lambda V_{3}+V_{5}\), we obtain the similarity variables and similarity solution
and the PDE \(E_5\)
Reduction 6 By using the generator \(V_{4}+V_{5}\), we obtain the similarity variables and similarity solution
and the PDE \(E_6\)
Reduction 7 By using the generator \(\lambda _1 V_{1}+\lambda _2 V_{2}+\lambda _3 V_{3}\), we obtain the similarity variables and similarity solution
and the PDE \(E_7\)
3.1 Symmetry reductions to ODE’s and exact solutions
The reduced PDE’s in \((1+1)\) variables admit symmetries which lead to further reductions to ODE’s, we shall use again the techniques of Lie group theory.
- 1.
Equation \(\mathbf{E_1}\), admits the following symmetries
$$\begin{aligned} \begin{array}{ll} \mathbf{v}_{11}=\displaystyle \frac{\partial }{\partial z_1} ,\quad \mathbf{v}_{12}=\displaystyle \frac{\partial }{\partial h} ,\quad \mathbf{v}_{13}=\displaystyle \frac{\partial }{\partial z_2}+\displaystyle \frac{z_1}{a}\frac{\partial }{\partial h}, \end{array} \end{aligned}$$(26)By using \(\mu \mathbf{v}_{11}+\mathbf{v}_{13}\) we obtain the similarity variable and similarity solutions
$$\begin{aligned} w=z_{1}-\mu z_2,\quad h=g(w)+\displaystyle \frac{z_1^2}{2a\mu }, \end{aligned}$$(27)and the ODE
$$\begin{aligned}&-\, \mu g''''-\mu (a+b)g'g''-(\lambda +w)g''-\frac{b}{a}g'-\frac{\lambda }{a\mu }=0. \end{aligned}$$(28)Integrating once with respect to w Eq. (28) can be reduced to the following second order ODE
$$\begin{aligned} -\, \mu g'''-\frac{\mu }{2}(a+b)(g')^2-(\lambda +w) g'+\left( 1-\frac{b}{a}\right) g-\frac{\lambda }{a\mu }w=0. \end{aligned}$$(29)By multiplying by \(g''\) in the case \(a=2b\) and then integrating once respect to w we get
$$\begin{aligned} (g'')^2=- b(g')^3-\frac{\lambda }{\mu }(g')^2-\frac{1}{\mu }g g'-\frac{\lambda }{b\mu ^2}(g'w-g)+c_1g+c_2\end{aligned}$$(30)with \(c_1\) and \(c_2\) constants of integration.The solutions of this equation when \(c_1=c_2=0\) are given by
$$\begin{aligned} g(w)=-\frac{\lambda }{b\mu }w+k \end{aligned}$$where k is a constant of integration. Thus, solutions of (1) are given by
$$\begin{aligned} u(t,x,y)=-\frac{\lambda }{b\mu }\left( x-\lambda \ln {t}-\mu \frac{y}{t}\right) +\frac{(x-\lambda \ln {t})^2}{4b\mu }+k. \end{aligned}$$(31)In Fig. 1 we considere \(y=0,3, \lambda =1,5, \mu =-1, b=-0,1 k=2,3\).
- 2.
Equation \(\mathbf{E_2}\), admits the following symmetries
$$\begin{aligned} \begin{array}{ll} {bf v}_{21}=\displaystyle \frac{\partial }{\partial z_1} ,\quad \mathbf{v}_{22}=\displaystyle \frac{\partial }{\partial h} ,\quad \mathbf{v}_{23}=z_1\displaystyle \frac{\partial }{\partial z_1}-h\frac{\partial }{\partial h},\quad \mathbf{v}_{\alpha }=\alpha (z_2)\displaystyle \frac{\partial }{\partial z_2} , \end{array} \end{aligned}$$(32)where \(\alpha (z_2)\) is an arbitrary function of \(z_2\). By using \(\mu _1 \mathbf{v}_{21}+\mu _2 \mathbf{v}_{22}+\mathbf{v}_{\alpha }\) we obtain the similarity variable and similarity solutions
$$\begin{aligned} w=z_{1}-\mu _1 \displaystyle \int \frac{1}{\alpha (z_2)}dz_2,\quad h=g(w)+\mu _2 \displaystyle \int \frac{1}{\alpha (z_2)}dz_2, \end{aligned}$$(33)and the ODE
$$\begin{aligned}&-\, a\mu _1 g'g''-b\mu _1 g'g''+b\mu _2 g''-\mu _1 g''''=0. \end{aligned}$$(34)Integrating once with respect to w, by multiplying by \(g''\) and integrating again respect to w, Eq. (34) can be reduced to the following second order ODE
$$\begin{aligned} (g'')^2=-\frac{a+b}{3}(g')^3+b\frac{\mu _2}{\mu _1}(g')^2+c_1g'+c_2 \end{aligned}$$(35)where \(c_1\) and \(c_2\) are constants ot integration. The solutions of this equation when \(c_1=c_2=0\) are
$$\begin{aligned} g(w)=\frac{3b\mu _2}{\mu _1(a+b)}w+k \end{aligned}$$and
$$\begin{aligned} g(w)=\frac{6b\mu _2}{\sqrt{b\mu _1\mu _2}(a+b)}\tanh {\left( \frac{\sqrt{b\mu _1\mu _2}}{2\mu _1}(w+k_1)\right) }+k_2 \end{aligned}$$where k, \(k_1\) and \(k_2\) are constants of integration. Hence, for Eq. (1) we give respectively the followings solutions
$$\begin{aligned} u(t,x,y) & = {} \frac{3b\mu _2}{\mu _1(a+b)}\left( x-b\int F_2(t) dt-\mu _1\int \frac{1}{\alpha (y)}dy\right) \nonumber \\&+\,\mu _2\int \frac{1}{F_2(y)}dy+yF_2(t)+k \end{aligned}$$(36)and for \(\alpha (t)=F_2(t)\) the following solution
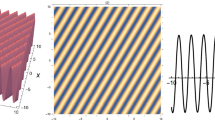
$$\begin{aligned} u(t,x,y) & = {} \frac{6b\mu _2}{\sqrt{b\mu _1\mu _2}(a+b)}\nonumber \\&\qquad \tanh {\left( \frac{\sqrt{b\mu _1\mu _1}}{2\mu _1}\left( x-b\int F_2(t) dt-\int \frac{1}{F_2(y)}dy\right) +k_1\right) }\nonumber \\&+\, \mu _2\int \frac{1}{F_2(y)}dy+yF_2(t)+k. \end{aligned}$$(37)In Fig. 2 we considere \(k=1, \mu _2=1, \mu _1=1, y=1, a=3, b=1,5, F_1(x)=x^3, F_2(x)=x^2\) and \(\mu _2=1, \mu _1=1, k_1=1, k=1, y=t, b=1, a=2, F_1(x)=x, F_2(x)=x^2\) respectively.

Exact solution of (31)

By using \(\mathbf{v}_{23}+\mathbf{v}_{\alpha }\) we obtain the similarity variable and similarity solutions
and the ODE
- 3.
Equation \(\mathbf{E_3}\) admits symmetries (33) and
$$\begin{aligned} \mathbf{v}_{31}=z_1\displaystyle \frac{\partial }{\partial z_1},\quad \mathbf{v}_{32}=z_1\displaystyle \frac{\partial }{\partial h},\quad \mathbf{v}_{33}=\displaystyle \frac{\partial }{\partial z_1}+\frac{h}{z_1} \frac{\partial }{\partial h},\quad \mathbf{v}_{\alpha }=\alpha (z_2)\displaystyle \frac{\partial }{\partial z_2}. \end{aligned}$$(40)By using \(\mathbf{v}_{32}+\mu \mathbf{v}_{33}+\mathbf{v}_{\alpha }\) we obtain the similarity variable and similarity solutions
$$\begin{aligned} w=z_1-\mu \displaystyle \int \frac{1}{\alpha (z_2)}dz_2,\quad h=g(w)z_1+\displaystyle \frac{z_1^2}{\mu } \end{aligned}$$(41)and the ODE
$$\begin{aligned} \begin{array}{l} -\mu g'''' -2bg''-3b\mu g'g''=0. \end{array} \end{aligned}$$(42)Integrating (42), by multiplying by \(g''\) and integrating again with respect to w we arrive to the following second order ODE
$$\begin{aligned} (g'')^2=-\frac{2b}{\mu }(g')^2-b(g')^3+c_1 g'+c_2 \end{aligned}$$(43)The solutions of this equation when \(c_1=c_2=0\) are
$$\begin{aligned}&g(w)=k,\\&g(w)=-\frac{2}{\mu }w+k \end{aligned}$$and
$$\begin{aligned}&g(w)=-\frac{2\sqrt{2}}{\sqrt{\mu b}}\tan {\left( \frac{\sqrt{2b\mu }}{2\mu }(k_1+w)\right) }+k_2 \end{aligned}$$where k, \(k_1\) and \(k_2\) are constants of integration. Thus, for Eq. (1) we give respectively the followings solutions
$$\begin{aligned} u(t,x,y) & = {} \frac{1}{x}\left( k\frac{x}{\sqrt{t}}+\frac{1}{n}\frac{x^2}{t}\right) +\frac{xy}{2bt}, \end{aligned}$$(44)$$\begin{aligned} u(t,x,y) & = {} \frac{1}{x}\left( -\frac{2}{\mu }\left( \frac{x}{\sqrt{t}}-\frac{\mu }{t}\int \frac{1}{F_1\left( \frac{y}{t}\right) }dy+\right. \right. \nonumber \\&\left. \left. +\mu y\int \frac{1}{t^2 F_1(\frac{y}{t})}dt+k\right) \frac{x}{\sqrt{t}}+\frac{1}{n}\frac{x^2}{t}\right) +\frac{xy}{2bt} \end{aligned}$$(45)and
$$\begin{aligned} u(t,x,y)=\left( \left( -\frac{2\sqrt{2}}{\sqrt{\mu b}}\tan {}\left( \frac{\sqrt{2b\mu }}{2\mu } \left( k_1+\frac{x}{\sqrt{t}}-\frac{\mu }{t}\int \frac{1}{F_1\left( \frac{y}{t}\right) }dy+ \right. \right. \right. \right. \nonumber \\ \left. \left. \left. \left. +\mu y\int \frac{1}{t^2 F_1(\frac{y}{t})}dt+k\right) \right) {}+k_2\right) \frac{x}{\sqrt{t}}+\frac{1}{\mu }\frac{x^2}{t}\right) \frac{1}{x}+\frac{xy}{2bt} \end{aligned}$$(46)In Fig. 3 we considere \(y=t^2, n=1, b=1, k=0,2\) for the first solution, \(y=-2.1, \mu =0.5, n=1, b=1, k=1\) for the second solution and finally \(y=3, \mu =3, n=1, b=-1, k=1, k_1=1, k_2=2, F_1(t)=t.\)
By using \(\mathbf{v}_{33}+\mathbf{v}_{\alpha }\) we obtain the similarity variable and similarity solutions
$$\begin{aligned} w=z_1-\displaystyle \int \frac{1}{\alpha (z_2)}dz_2,\quad h=g(w) z_1 \end{aligned}$$(47)and the ODE
$$\begin{aligned} \begin{array}{l} g'''' -3bg'g''=0. \end{array} \end{aligned}$$(48)Integrating (48), by multiplying by \(g''\) and integrating again with respect to w we arrive to the following second order ODE
$$\begin{aligned} (g'')^2=-b(g')^3+c_1 g'+c_2 \end{aligned}$$(49)The solutions of this equation when \(c_1=c_2=0\) are
$$\begin{aligned} g(w)=k \end{aligned}$$and
$$\begin{aligned} g(w)=\frac{4}{b\left( w+k_1 \right) }+k_2 \end{aligned}$$where k, \(k_1\) and \(k_2\) are constants of integration. Thus, for Eq. (1) we give respectively the followings solutions
$$\begin{aligned} u(t,x,y)=\frac{k}{\sqrt{t}}+\frac{xy}{2bt} \end{aligned}$$(50)and
$$\begin{aligned} u(t,x,y) & = {} \frac{1}{x}\left( \frac{4}{b}\left( \frac{x}{\sqrt{t}}-\frac{1}{t}\int \frac{1}{F_1\left( \frac{y}{t}\right) }dy+ y\int \frac{1}{t^2 F_1(\frac{y}{t})}dt+k_1\right) ^{-1}\right. \nonumber \\&\left. +k_2 \right) \frac{x}{\sqrt{t}}+\frac{xy}{2bt}. \end{aligned}$$(51)In Fig. 4 we considere \(y=4, n=1, b=1\) and \(y=x^2, n=0,1, b=0,8, k=2, k_1=0, k_2=0,\)\(F_1(t)=t\) respectively.
By using \(\mathbf{v}_{31}+\mathbf{v}_{\alpha }\) we obtain the similarity variable and similarity solutions
$$\begin{aligned} w=z_1 e^{ -\int \displaystyle \frac{1}{\alpha (z_2)}dz_2},\quad h=g(w) \end{aligned}$$(52)and the ODE
$$\begin{aligned} \begin{array}{l} -w^4g''''+2bw^2(g')^2+2bw^2gg''-2bwgg'-3bw^3g'g''=0. \end{array} \end{aligned}$$(53)


-
4.
Equation \(\mathbf{E_4}\) admits symmetries
$$\begin{aligned} \mathbf{v}_{41}=\displaystyle \frac{\partial }{\partial h},\quad \mathbf{v}_{42}=\displaystyle \frac{\partial }{\partial z_1}+\frac{z_1}{\lambda }\frac{\partial }{\partial h},\quad \mathbf{v}_{43}=\displaystyle \frac{\partial }{\partial z_2}-\frac{z_1}{a}\frac{\partial }{\partial h}. \end{aligned}$$(54)By using \(\mathbf{v}_{42}+\mu \mathbf{v}_{43}\) we obtain the similarity variable and similarity solutions
$$\begin{aligned} w=z_1-\displaystyle \frac{z_2}{\mu },\quad h=g(w)+\displaystyle \frac{z_1^2}{2}\left( \frac{1}{\lambda }-\frac{\mu }{a}\right) \end{aligned}$$(55)and the ODE
$$\begin{aligned} \begin{array}{l} -g''''-(\lambda \mu +a) g''-\mu wg''-(a+b)g'g''+\left( \displaystyle \frac{\mu }{a}-\frac{2}{\lambda }\right) bg'+\frac{\lambda \mu ^2}{a}-\mu =0. \end{array} \end{aligned}$$(56)Integrating (56)we arrive to the following second order ODE
$$\begin{aligned}&-g'''-(\lambda \mu +a)g'+\mu wg'-\left( \frac{a+b}{2}\right) (g')^2+ \nonumber \\&\quad +\left( \frac{2b}{\lambda }+\frac{\mu b}{a}-\mu \right) g+\left( \frac{\lambda \mu ^2}{a}-\mu \right) w=0. \end{aligned}$$(57)By using \(\mathbf{v}_{43}\) we obtain the similarity variable and similarity solutions
$$\begin{aligned} w=z_1,\quad h=g(w)-\displaystyle \frac{1}{a}z_1z_2 \end{aligned}$$(58)and the ODE
$$\begin{aligned} \begin{array}{l} \left( \lambda +\displaystyle \frac{b}{a}w\right) g''+g'+\displaystyle \left( \frac{b}{a\lambda }-\frac{1}{\lambda }\right) w-1=0. \end{array} \end{aligned}$$(59)Integrating (59) we arrive to the following first order ODE
$$\begin{aligned} \left(\lambda +\displaystyle \frac{b}{a}w\right)g'+\left(1-\displaystyle \frac{b}{a}\right)g+\displaystyle \frac{1}{2} \left( \frac{b}{a\lambda }-\frac{1}{\lambda }\right) w^2-w+c_1=0. \end{aligned}$$(60)The solutions of this equation when \(c_1=c_2=0\) are
$$\begin{aligned} g(w)=\frac{1}{2\lambda \left( a^2-b^2 \right) }\left( 2\lambda k_1 \left( a^2-b^2 \right) \left( \lambda a+b w \right) ^{1-\frac{a}{b}}+ 4 \left( \lambda a+ \frac{w}{2}\left( b-a\right) \right) ^2\right) \end{aligned}$$where k, \(k_1\) and \(k_2\) are constants of integration. Thus, for Eq. (1) we give respectively the followings solutions
$$\begin{aligned} u(t,x,y) & = {} \frac{x^2}{2\lambda }-\frac{1}{a}\left( x-\lambda \ln t \right) \left( \frac{y}{t}-a\ln t \right) \nonumber \\& \quad +\, \frac{1}{2\lambda \left( a^2-b^2\right) } \left( 2\lambda k_1\left( a^2-b^2\right) \left( \lambda a+b\left( x-\lambda \ln t\right) \right) ^{1-\frac{a}{}} \right. \nonumber \\&\left. \quad +\, 4\,\left( \lambda a+\frac{1}{2}\left( x-\lambda \ln t\right) \left( b-a\right) \right) ^2\right) \end{aligned}$$(61)In Fig. 5 we considere \(y=x, \lambda =1, b=-1, a=3, k_1=1\).

Exact solution of (61)
-
5.
Equation \(\mathbf{E_5}\), for \(\lambda =0\), admits symmetries
$$\begin{aligned}&\displaystyle \mathbf{v}_{51}=\frac{\partial }{\partial z_2},\quad \mathbf{v}_{52}=\frac{\partial }{\partial h},\quad \mathbf{v}_{53}=2b\frac{\partial }{\partial z_1}+z_2\frac{\partial }{\partial h},\nonumber \\&\displaystyle \mathbf{v}_{54}=-\, z_1\frac{\partial }{\partial z_1}+2z_2\frac{\partial }{\partial z_2}+h\frac{\partial }{\partial h}. \end{aligned}$$(62)By using \(\mu \mathbf{v}_{51}+\mathbf{v}_{53}\) we obtain the similarity variable and similarity solutions
$$\begin{aligned} w=z_1-\displaystyle \frac{2b}{\mu }z_2,\quad h=g(w)+\displaystyle \frac{1}{2\mu }z_2^2 \end{aligned}$$(63)and the ODE
$$\begin{aligned} \begin{array}{l} 4bg''''+4b(a+b)g'g''+\mu wg''+2\mu g'=0. \end{array} \end{aligned}$$(64)Integrating we arrive to the following third order ODE
$$\begin{aligned} 4bg'''+2b(a+b)(g')^2+\mu w g'+\mu g=0. \end{aligned}$$(65)The solution of this equation when \(a=-b\) is given by
$$\begin{aligned}&u(t,x,y)\,k_1 w^2 \hbox {hypergeom} \left( \left[ 1 \right] , \left[ \frac{4}{3},\frac{5}{3} \right] ,- \frac{x^3n}{36b} \right) \nonumber \\&\quad +\, k_2 \hbox {BesselI} \left( - \frac{1}{3}, \frac{\sqrt{- \frac{x^3n}{b}}}{3} \right) \left( - \frac{x^3n}{b} \right) ^{ \frac{1}{6}}\nonumber \\&\quad +\, k_3 \hbox {BesselI} \left( \frac{1}{3}, \frac{\sqrt{- \frac{x^3n}{b}}}{3} \right) \left( - \frac{x^3n}{b} \right) ^{ -\frac{1}{6}} \end{aligned}$$(66)where \(k_1\), \(k_2\) and \(k_3\) are constants of integration. Thus, for Eq. (1) we give respectively the followings solutions
$$\begin{aligned} u(t,x,y) & = {} \frac{1}{t^{3/2}f(t)^{1/6}}\left[ (-2x(\ln {(t)}+2)\sqrt{t}+t\ln {(t)}^2+4t\ln {(t)} \right. \nonumber \\&\left. +\, x^2+4t)\cdot f(t)^{1/6} \hbox {hypergeom} \left( \left[ 1 \right] , \left[ \frac{4}{3},\frac{5}{3} \right] , \frac{1}{36} f(t) \right) \right. \nonumber \\&\left. -\, 3(-\sqrt{t}x+t(2+\ln {(t)})) \hbox {BesselI} \left( \frac{1}{3}, \frac{1}{3}\sqrt{f(t)} \right) \left( - \frac{x^3n}{b} \right) ^{ \frac{1}{6}} \right. \nonumber \\&\left. +\, 2t f(t)^{1/3} \hbox {BesselI} \left( -\frac{1}{3}, \frac{1}{3}\sqrt{f(t)} \right) +\frac{1}{16}(\ln {(t)}+2)^2 \right] \end{aligned}$$(67)where \(f(t)=t^{-3/2}\left( (\ln {(t)}+2)\sqrt{t}-x\right) ^3\). In Fig. 6 we considere \(y=1\) and \(b=1\).
By using \(\mu \mathbf{v}_{54}\) we obtain the similarity variable and similarity solutions
$$\begin{aligned} w=z_1 z_2^{1/2},\quad h=g(w)z_2^{1/2} \end{aligned}$$(68)and the ODE
$$\begin{aligned} \begin{array}{l} wg''''+4g'''+(a+b)wg'g''+bgg''-wg''+2a(g')^2-2g'=0.\end{array}\end{aligned}$$(69)

Exact solution of (67)
-
6.
Equation \(\mathbf{E_6}\), for \(\lambda =0\), admits symmetries
$$\begin{aligned} \displaystyle \mathbf{v}_{61}=\frac{\partial }{\partial h},\quad \mathbf{v}_{62}=\frac{\partial }{\partial z_1}+\frac{z_2}{b}\frac{\partial }{\partial h},\quad \mathbf{v}_{63}=z_1\frac{\partial }{\partial z_1}-2z_2\frac{\partial }{\partial z_2}-h\frac{\partial }{\partial h}. \end{aligned}$$(70)By using \(\mu \mathbf{v}_{63}\) we obtain the similarity variable and similarity solutions
$$\begin{aligned} \begin{array}{c} w=z_1 z_2^{1/2},\quad h=g(w)z_2^{1/2} \end{array} \end{aligned}$$(71)and the ODE
$$\begin{aligned} \begin{array}{l} -\,wg''''-4g'''+(a+b)wg'g''+bgg''+wg''+2a(g')^2+2g'=0. \end{array} \end{aligned}$$(72)
4 Lie symmetry groups
In this part, by solving the following initial problems, we can get the Lie symmetry group from the related symmetries. Considering the infinite symmetry generators, we can observe that
Theorem 2
The one-parameter Lie symmetry groups\(g_i\), \(i = 1,\ldots ,6,\)which are generated through\(V_i\), \(i = 1,\ldots ,6\), respectively are given by
The groups\(g_{1,F_1(t)}\)and\(g_{2,F_2(t)}\)generated through\(V_{1,F_1(t)}\)and\(V_{2,F_2(t)}\)respectively are given by
And finally for\(V_7\)with\(a=2b\), the Lie symmetry group is given by the shift\(g_7\)
where\(\epsilon\)is the group parameter.
Proof
To calculate the one-parameter Lie symmetry group g(t, x, y, u) generated through the general vector field (3), we consider
and we solve the following initial problems
and
From (83)–(86) we obtain the corresponding Lie symmetry group. \(\square\)
4.1 New solutions
The theory of Lie assures that a group of symmetry transforms solution into solutions, then we can conclude that if \(u=f(t, x, y)\) represents a known solution of the differential Eq. (1), by applying the different group of symmetry we can calculate the new solutions of (1).
By applying the above groups \(g_i\), \((i=1,\ldots 6)\) we can obtain the corresponding new solutions:
The groups \(g_{1,F_1(t)}\) and \(g_{2,F_2(t)}\) give us the solutions:
and for the Lie symmetry group \(g_7\) we obtain the new solutions:
5 Conservation laws
A local conservation law for the generalized (2+1)-dimensional nonlinear evolution Eq. (1) is a divergence expression
holding on the whole solution space \(\varepsilon\) of Eq. (1). The conserved density T and the spatial fluxes X and Y are functions of t, x, y, u and derivatives of u. Here \(D_t\), \(D_x\) and \(D_y\) denote the total derivative operators with respect t, x and y respectively.
This method makes use of the concept of multiplier, that is, a function \(Q(t,x,y,u,u_t,u_x, \,\ldots )\) which satisfies that \((u_{tx} + a u_x u_{xy} + b u_{xx} u_y + u_{xxxy})Q\) is a divergence expression for solutions of (1) and for any function u(t, x, y). All non-trivial conservation laws arise from multipliers. When we move off of the set of solutions of Eq. (1), every non-trivial local conservation law (97) is equivalent to one that can be expressed in the characteristic form
that vanishes on the set of solutions of Eq. (1) where \((\widehat{T},\widehat{X},\widehat{Y})\) differs from (T, X, Y) by a trivial conserved current.
We find all multipliers by solving the determining equation
where \(\frac{\delta }{\delta u}\) is the Euler–Lagrange operator \(\hat{E}[u]\) given by
and the general form for a low-order multiplier for the generalized (2+1)-dimensional nonlinear evolution Eq. (1) is given by
The determining Eq. (99) yields a linear determining system for the multipliers Q(t, x, y, u)
We solve this determining system and we get two multipliers
Theorem 3
The low-order local conservation laws admitted on the whole solution space\(\varepsilon _{+}\)by the generalized (2+1)-dimensional nonlinear evolution Eq. (1) are given by
- 1.
Corresponding to the multiplier\(Q_1\)we obtain the first conservation law
$$\begin{aligned} T_1 & = {} \displaystyle \frac{u_x^2}{2},\nonumber \\ X_1 & = {} \displaystyle -u_{xy}u_{xx}+\frac{b}{2}u_x^2u_y, \nonumber \\ Y_1 & = {} \displaystyle \frac{2a-b}{6}u_x^3+u_x u_{xxx}+\frac{1}{2}u_{xx}^2. \end{aligned}$$(103) - 2.
For the multiplier\(Q_2\)we obtain the second conservation law, withf(t) arbitrary function
$$\begin{aligned} T_2 & = {} f(t)u_x,\nonumber \\ X_2 & = {} bf(t)u_xu_y-f'(t)u, \nonumber \\ Y_2 & = {} \displaystyle \frac{1}{2}f(t)\left[ (a+b)u_x^2+2u_{xxx}\right] . \end{aligned}$$(104)
Proof
For each of the conserved currents obtained, Eq. (97) is satisfied when the generalized (2+1)-dimensional nonlinear evolution Eq. (1) holds. By solving the determining Eq. (99), the solution multipliers \(Q_1\) and \(Q_2\) give us these conserved densities and fluxes of Eq. (1) and they are the only conservation laws admitted by this equation. \(\square\)
6 Concluding remarks
In this paper, by using the Lie symmetry analysis method, we studied the generalized (2+1)-dimensional nonlinear evolution Eq. (1). All the Lie point symmetries admitted by this equation is performed. We have construct an optimal system of subalgebras and used it to obtain symmetry reductions and exact solutions of (1). Furthermore, we have determined the Lie symmetry groups and obtained new solutions. Finally by using the multipliers method we performed a clasification of low-order conservation laws.
References
M.O. Al-Amr, Exact solutions of the generalized (2 + 1)-dimensional nonlinear evolution equations via the modified simple equation method. Comput. Math. Appl. 69, 390–397 (2015)
M. Abramowitz, I.A. Stegun, Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables (Dover Publications, New York, 1972)
G.W. Bluman, J.D. Cole, The general similarity solutions of the heat equation. J. Math. Mech. 18, 1025–1042 (1969)
G.W. Bluman, S. Kumei, Symmetries and Differential Equations (Springer, New York, 1989)
R. de la Rosa, E. Recio, T.M. Garrido, M.S. Bruzón, On a Generalized Variable-Coefficent Gardner Equation with Linear damping and Dissipative Terms (Wiley, Hoboken, 2019), pp. 7158–7169
M.L. Gandarias, S. Sáez, Travelling wave solutions of the Calogero–Degasperis–Fokas equation in 2+1 dimensions. Theor. Math. Phys. 144–1, 916–926 (2005)
N.A. Kudryashov, Simplest equation method to look for exact solutions of nonlinear differential equation. Chaos Solitons Fractals 24, 1217–1231 (2005)
N.A. Kudryashov, One method for finding exact solution of nonlinear differential equations. Commun. Nonlinear Sci. Number Simul. 17, 2248–2253 (2012)
C. Li, J. Zhang, Lie symmetry analysis and exact explicit solutions of generalalized fractional Zakharov–Kuznetsov equations. Symmetry 11(601), 1–12 (2019)
H. Liu, J. Li, Q. Zhang, Lie symmetry analysis and exact explicit solutions for general Burger’s equation. J. Comput. Appl. Math. 228, 1–9 (2009)
W.X. Ma, T. Whang, Y. Zhang, A multiple exp-function method for nonlinear differential equations and its applications. Phys. Scr. 82, 065003 (2010)
W. Malfliet, The tanh method: a tool for solving certain classes of nonlinear evolution and wave equations. J. Comp. Appl. Math. 164–165, 529–541 (2004)
M. Mehdipoor, A. Neirameh, New soliton solutions to the (3+1)-dimensional Jimbo–Miwa equation. Optik 126, 4718–4722 (2015)
D.M. Mothibi, C.M. Khalique, Conservation laws and exact solutions of a generalized Zakharov–Kuznetsov equation. Symmetry 7, 949–961 (2015)
T. Nagai, T. Senba, K. Yoshida, Global existence of solutions to the parabolic systems of chemotaxis (nonlinear evolution equations and applications). Kurenai 1009, 22–28 (1997)
M. Najafi, M. Najafi, S. Arbabi, New applications of (g’/G)-expansion method for generalized (2+1)-dimensional nonlinear evolution equation. Int. J. Eng. Math. 2013, 5 (2013)
P.J. Olver, Applications of Lie Groups to Differential Equations, Graduate Texts in Mathematics, vol. 107, 2nd edn. (Springer, Berlin, 1993)
A. Ouhadan, E.H. El Kinani, Lie Symmetries and Preliminary Classification of Group-Invariant Solutions of Thomas equation (2005). arXiv:math-ph/0412043v2
E. Recio, S. Anco, Conservation laws and symmetries of radial generalized nonlinear p-Laplacian evolution equations. J. Math. Anal. Appl. 452, 1229–1261 (2017)
M. Tahami, M. Najafi, Multi-wave solutions for the generalized (2+1)-dimensional nonlinear evolution equations. Optik 136, 228–236 (2017)
A.M. Wazwaz, The extended tanh method for the Zakharo–Kuznetsov (ZK) equation, the modified ZK equation and its generalized forms. Commun. Nonlinear Sci. Numer. Simul. 13, 1039–1047 (2008)
A.M. Wazwaz, Travelling wave solutions to (2+1)-dimensional nonlinear evolution equations. J. Nat. Sci. Math. 1, 1–13 (2007)
J.W. Wilder, B.F. Edwards, D.A. Vasqez, G.I. Sivashinsky, Derivation of a nonlinear front evolution equation for chemical waves involving convection. Phys. D 73, 217–226 (1994)
E. Yang, Weinan Nonlinear evolution equation for the stress-driven morphological instability. J. Appl. Phys. 91, 9414–9422 (2002)
X. Zhao, L. Wang, W. Sun, The repetead homogeneous balance method and its applications to nonlinear partial differential equations. Chaos Soliton Fractals 28, 448–453 (2006)
W. Zhang, J. Zhou, S. Kumar, Symmetry reduction, exact solutions and conservation laws of the ZK–BBM equation. Int. Sch. Res. Netw. 2012, 1–9 (2012). https://doi.org/10.5402/2012/834241
Acknowledgements
The authors express their sincerest gratitude to the Plan Propio de Investigación de la Universidad de Cádiz.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Sáez, S., de la Rosa, R., Recio, E. et al. Lie symmetries and conservation laws for a generalized (2+1)-dimensional nonlinear evolution equation. J Math Chem 58, 775–798 (2020). https://doi.org/10.1007/s10910-020-01111-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10910-020-01111-8