
Abstract
We consider a derivative nonlinear Schrödinger equation with general nonlinearlity:
In Tang and Xu (J Differ Equ 264(6):4094–4135, 2018), the authors prove the stability of two solitary waves in energy space for \(\sigma \in (1,2)\). As a consequence, there exists a solution of the above equation which is close arbitrary to sum of two solitons in energy space when \(\sigma \in (1,2)\). Our goal in this paper is proving the existence of multi-solitons in energy space for \(\sigma \geqslant \frac{3}{2}\). Our proofs proceed by fixed point arguments around the desired profile, using Strichartz estimates.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In this paper, we consider the following generalized derivative nonlinear Schrödinger equation:
where \(\sigma \in \mathbb {R}^{+}\) is a given constant and \(u:\mathbb R_t\times \mathbb R_x\rightarrow \mathbb C\).
The Eq. (1.1) was studied in many works. In the special case \(\sigma =1\), local well-posedness, global well posedness, stability of solitary waves and stability of multi-solitons have been investigated. In [15], Ozawa gave a sufficient condition for global well posedness of (1.1) in the energy space by using a Gauge transformation to remove the derivative terms. In [2], Colin–Ohta showed that the equation has a two parameters family of solitary waves and proved the stability of these particular solutions by using variational methods. In [8], Kwon-Wu gave a result on stability of solitary waves when the parameters are at the threshold between existence and non-existence. In [11], Le Coz–Wu proved stability of multi-solitons in the energy space under some conditions on the parameters of the composing solitons.
In the general case, the local well-posedness and global well- posedness of (1.1) was studied in [6] when the initial data is in the Sobolev space \(H_0^1(\Omega )\), where \(\Omega \) is any unbounded interval of \(\mathbb {R}\). In this work, Hayashi-Ozawa used an approximation argument. In [16], Santos proved the local well-posedness for small size initial data in weighted Sobolev spaces. The arguments used in this work follow parabolic regularization approach introduced by Kato [7].
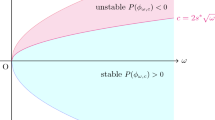
The Eq. (1.1) has a two parameters family of solitons. The stability of the solitons has attracted the attention of many researchers. In [12], by using the abstract theory of Grillakis–Shatah–Strauss [3, 4], Liu–Simpson–Sulem proved that in the case \(\sigma \geqslant 2\), the solitons of (1.1) are orbitally unstable; in the case \(0<\sigma <1\), they are orbitally stable and in the case \(\sigma \in (1,2)\) they are orbitally stable if \(c<2z_0\sqrt{\omega }\) and orbitally unstable if \(c>2z_0\sqrt{\omega }\) for some constant \(z_0 \in (0,1)\). In the critical case \(c=2z_0\sqrt{\omega }\), Guo–Ning–Wu [5] proved that solitons are always orbitally unstable. In [1], Bai–Wu–Xue proved that when \(\sigma \geqslant \frac{3}{2}\), the solution is global and scattering when the initial data small in \(H^s(\mathbb {R})\), \(\frac{1}{2}\leqslant s\leqslant 1\). Moreover, the authors showed that when \(\sigma <2\), the scattering may not occur even under smallness conditions on the initial data. Therefore, in this model, the exponent \(\sigma \geqslant 2\) is optimal for small data scattering. In [17], in the case \(\sigma \in (1,2)\), Tang and Xu proved the stability of the sum of two solitary waves in the energy space provided that solitons are stables i.e \(c<2z_0\sqrt{\omega }\), using perturbation arguments, modulational analysis and an energy argument as in [13, 14].
In this paper, we show the existence of multi-solitons in energy space in the case \(\sigma \geqslant \frac{3}{2}\). Before stating the main result, we give some preliminaries on multi-solitons of (1.1).
As mentioned in [12], the Eq. (1.1) admits a two-parameters family of solitary waves solutions given by
where \(\omega >\frac{c^2}{4}\) and
The profile \(\varphi _{\omega ,c}\) is a positive solution of
Define
where
Clearly, we have
and \(\phi _{\omega ,c}\) solves
Let \(K\in \mathbb {N}\), \(K \geqslant 2\). For each \(1 \leqslant j \leqslant K\), let \((\omega _j,c_j,\theta _j) \in \mathbb {R}^3\) be parameters such that \(\omega _j>\frac{c_j^2}{4}\). Define, for each \(j=1,\ldots ,K\)
and define the multi-soliton profile by
For convenience, define \(h_j=\sqrt{4\omega _j-c_j^2}\), for each \(j=1,\ldots ,K\). Our main result is the following.
Theorem 1.1
Let \(\sigma \geqslant \frac{3}{2}\), \(K\in \mathbb {N}\), \(K\geqslant 2\) and for each \(1\leqslant j\leqslant K\), \((\theta _j,\omega _j,c_j)\) be a sequence of parameters such that \(\theta _j\in \mathbb {R}\), \(c_j\ne c_k\), for \(j\ne k\). The multi-soliton profile R is given as in (1.9). There exists a certain positive constant \(C_*\) such that if the parameters \((\omega _j,c_j)\) satisfy
then there exists a solution u of (1.1) such that
for positive constants \(C,T_0\) depending only on the parameters \(\omega _1,\ldots ,\omega _K,c_1,\ldots ,c_K\) and \(\lambda =\frac{1}{16}v_{*}\).
Remark 1.2
The condition \(\sigma \geqslant \frac{3}{2}\) is used to prove the existence of solution \(\eta \) of (2.14) by using contraction mapping theorem.
The condition (1.10) is an implicit condition on the parameters. Below, we show that for large, negative and enough separated velocities, the condition (1.10) holds.
Remark 1.3
We prove that there exist parameters \((\omega _j,c_j,\theta _j)\) for \(1 \leqslant j\leqslant K\) such at the condition (1.10) is satisfied for any prescribed \(h_j\) and ratio \(c_1:c_2:\cdot \cdot \cdot :c_K\) between negative \(c_j\). Let \(M>0\), \(h_j>0\), \(d_j<0\), for each \(1\leqslant j\leqslant K\). We chose \((c_j,\omega _j)=\left( Md_j,\frac{1}{4}(h_j^2+M^2d_j^2)\right) \). We verify that this choice satisfies the condition (1.10) for M large enough. Indeed, we see that \(c_j<0\) and \(h_j \ll |c_j|\) for M large enough. We have
Using \(|\sinh (x)| \leqslant |\cosh (x)|\) for all \(x\in \mathbb {R}\) we have
Thus,
Hence,
Furthermore,
where we use \(h_j \leqslant 2\sqrt{\omega _j}\). Thus,
The condition (1.10) satisfies if the following estimate holds:
We see that the left hand side of (1.11) is order \(M^{1-\frac{1}{2\sigma }}\) and the right hand side of (1.11) is order \(M^1\). Hence, the condition (1.10) satisfies if we choose M large enough.
Remark 1.4
The exponent \(\sigma = 2\) is the borderline for the existence of stable solitons. Since the example given in Remark 1.3 chooses all \(c_j\) negative, by the work of Liu-Simpson-Sulem [12], solitons are stable for \(\sigma < 2\) and unstable for \(\sigma \geqslant 2\). This shows that in Theorem 1.1, we can construct multi-solitons from stable solitons or unstable solitons.
Our strategy of the proof of Theorem 1.1 is as follows. First, we define \(\varphi ,\psi \) based on u in such a way that \(\varphi \) and \(\psi \) satisfy a system of nonlinear Schrödinger equations without derivatives (see (2.3)). Let R be a multi-soliton profile which satisfies the assumptions of Theorem 1.1. Then R solves (1.1) up to a small perturbation. Let (h, k) be defined in a similar way as \((\varphi ,\psi )\) but replace u by R. We see that (h, k) solves (2.3) up to small perturbations. Setting \(\tilde{\varphi }=\varphi -h\) and \(\tilde{\psi }=\psi -k\), we see that if u solves (1.1) then \((\tilde{\varphi },\tilde{\psi })\) solves a system and a relation between \(\tilde{\varphi }\) and \(\tilde{\psi }\) holds and vice versa. By using the Banach fixed point theorem, we prove that there exists a solution \((\tilde{\varphi },\tilde{\psi })\) of this system which decays exponentially in time on \(H^1(\mathbb {R})\) for t large. Combining with the assumption (1.10), we can prove a relation between \(\tilde{\varphi }\) and \(\tilde{\psi }\). Thus, we easily obtain the solution u of (1.1) satisfying the desired property.
This paper is organized as follows. In Sect. 2, we prove the existence of multi-solitons for the Eq. (1.1). In Sect. 3, we prove some technical results which are used in the proof of the main result Theorem 1.1. More precisely, we prove the exponential decay of perturbations in the equations of h, k (Lemma 3.1) and the existence of decaying solutions for the system of equations of \(\tilde{\varphi },\tilde{\psi }\) (Lemma 3.8).
Before proving the main result, we introduce some notation used in this paper.
Notation
-
(1)
We denote the Schrödinger operator as follows
$$\begin{aligned} L=i\partial _t+\partial ^2_x. \end{aligned}$$ -
(2)
Given a time \(t\in \mathbb {R}\), the Strichartz space \(S([t,\infty ))\) is defined via the norm
$$\begin{aligned} \Vert u\Vert _{S([t,\infty ))}=\sup _{(q,r) \text { admissible }}\Vert u\Vert _{L^q_t L^r_x([t,\infty )\times \mathbb {R})}. \end{aligned}$$We denote the dual space by \(N[t,\infty )=S([t,\infty ))^{*}\). Hence for any (q, r) admissible pair we have
$$\begin{aligned} \Vert u\Vert _{N([t,\infty ))}\leqslant \Vert u\Vert _{L^{q'}_tL^{r'}_x([t,\infty )\times \mathbb {R})}. \end{aligned}$$ -
(3)
For \(a,b \in \mathbb {R}^2\), we denote \(|(a,b)|=|a|+|b|\).
-
(4)
Let \(a,b>0\). We denote \(a\lesssim b\) if a is smaller than b up to multiplication by a positive constant and denote \(a \lesssim _c b\) if a is smaller than b up to multiplication by a positive constant depending on c. Moreover, we denote \(a \approx b\) if a equals to b up to multiplication by a positive constant.
2 Proof of the Main Result
In this section we give the proof of Theorem 1.1. We use the Banach fixed point theorem and Strichartz estimates. We divide our proof in three steps. Step 1. Preliminary analysis. Let \(u \in C(I,H^1(\mathbb {R}))\) be a \(H^1(\mathbb {R})\) solution of (1.1) on I. Consider the following transform:
where
As in [6, section 4], using \(|u|=|\varphi |\) and  , we have
, we have

Thus, using \(|u|=|\varphi |\) and  , we have
, we have

Since u solves (1.1), we have

As in [6, section 4], we have

Thus, if u solves (1.1) then \((\varphi ,\psi )\) solves

For convenience, we define


Let R be the multi-soliton profile satisfying the assumption of Theorem 1.1. Define h, k by
Since \(R_j\) solves (1.1) for each \(1\leqslant j\leqslant K\), we have
By Lemma 3.1 for \(t \gg T_0\) large enough we have
Thus, we rewrite (2.6) as follows:
where
By an elementary calculation, we have

where


Since \(\Omega \) is uniformly bounded in time in \(H^2(\mathbb {R})\), we see that m, n are uniformly bounded in time in \(H^1(\mathbb {R})\). Let \(\tilde{\varphi }=\varphi -h\) and \(\tilde{\psi }=\psi -k\). Then \((\tilde{\varphi },\tilde{\psi })\) solves:
Set \(\eta =(\tilde{\varphi },\tilde{\psi })\), \(W=(h,k)\) and \(f(\varphi ,\psi )=(P(\varphi ,\psi ),Q(\varphi ,\psi ))\) and \(-H=e^{-\lambda t}(m,n)\). We will find in Step 2 a solutions of (2.13) in Duhamel form:
where S(t) denote the Schrödinger group. Moreover, since \(\psi =\partial _x\varphi -\frac{i}{2}|\varphi |^{2\sigma }\varphi \), we will prove in Step 3
Step 2 Existence of a solution of the system From Lemma 3.8, there exists \(T_{*} \gg 1\) such that for \(T_0 \geqslant T_{*}\) there exists a unique solution \(\eta \) of (2.13) defined on \([T_0,\infty )\) such that
Thus, for all \(t \geqslant T_0\), we have
Step 3 Existence of a multi-soliton train We first prove that the solution \(\eta =(\tilde{\varphi },\tilde{\psi })\) of (2.13) satisfies the relation (2.15). Set \(\varphi =\tilde{\varphi }+h\), \(\psi =\tilde{\psi }+k\) and \(v=\partial _x\varphi -\frac{i}{2}|\varphi |^{2\sigma }\varphi \) and \(\tilde{v}=v-k\). Since \((\tilde{\varphi },\tilde{\psi })\) solves (2.13) and (h, k) solves (2.10), we have \((\varphi ,\psi )\) solves (2.3). Furthermore,
Moreover,
Combining with (2.18) and using (2.3), we have
where \(G(\varphi ,v)\) contains the remaining ingredients and \(G(\varphi ,v)\) only depends on \(\varphi \) and v:
As the calculations of \(L\psi \) in the step 1, noting that the role of v is similar to the role of \(\psi \) in the process of calculation, we have \(G(\varphi ,v)=Q(\varphi ,v)\) (see Lemma 3.7 for a detailed proof). Hence,
Thus,
Multiplying both side of (2.20) by \(\overline{{\tilde{\psi }}-\tilde{v}}\), taking imaginary part and integrating over space with integration by parts we obtain




We denote by A, B, C, D the terms (2.21), (2.22), (2.23) and (2.24) respectively. First, we try to estimate A, B, C, D in term of R. We have

where,
Furthermore,

By using integration by parts for the second term of (2.26) and using Hölder inequality we have


where
Using (2.4), we have

where
Now, we give an estimate for D. We have

Combining (2.25), (2.27), (2.29) and (2.30), we have
Using the Grönwall inequality, we have for any \(t<N<\infty \),
The second inequality is by (2.17). Now, we try to estimate \(K_1+K_2+K_3\) in term of R. When we have this kind of estimate, we will use the assumption (1.10) to obtain that \(\tilde{\psi }=\tilde{v}\). We have
Using (2.16) and (2.17), we have
We denote by \(Z_1,Z_2,Z_3\) the terms (2.32), (2.33) and (2.34) respectively. Using (2.35), (2.36), (2.37), (2.16) and (2.17), for \(N \gg t\), we have
Similarly, for \(N\gg t\), we have
and
Hence, from (2.31), we have
The above estimate is not enough explicit. As said above, we would like to estimate the right hand side of (2.38) in terms of R. Noting that \(|h|=|R|\) and \(|k|=|\partial _xR|\), we have
Similarly, by noting that \(|\partial _xh|\leqslant |k|+|h|^{2\sigma +1}\), we have
and
Combining the above estimates, we have
Thus, there exists a positive constant \(C_0\) such that
Note that the constant \(C_0\) in the right side is independent of parameters \(\omega _j,c_j\). Let \(C_*=16C_0\). Using the assumption (1.10), we have
for t large enough. Thus, by (2.38), we have
for t large enough. Letting \(N \rightarrow \infty \) in the above estimate, we obtain
for all t large enough. This implies that
which is equivalent to (2.15) and then
Moreover, since \((\tilde{\psi },\tilde{\varphi })\) solves (2.13) we have \((\psi ,\varphi )\) solves (2.3). Combining with (2.40), if we set
then u solves (1.1) by Lemma 3.6. Furthermore, by Lemma 3.6, we have
Thus for t large enough, we have
for \(\lambda =\frac{1}{16}v_{*}\) and \(C=C(\omega _1,\ldots ,\omega _K,c_1,\ldots ,c_K)\). This completes the proof of Theorem 1.1.
3 Some Technical Lemmas
3.1 Properties of Solitons
In this section, we give the proof of (2.7). We have the following result.
Lemma 3.1
Let \(\lambda =\frac{1}{16}v_{*}\), where \(v_{*}\) is defined by (1.10). There exist \(C>0\) and such that for \(t>0\) large enough, the estimate (2.7) uniformly holds in time.
Proof
First, we need some estimates on the profile. We have
Furthermore,
Thus,
Using the above estimates, we have
By similar arguments, we have
For convenience, we set
Fix \(t>0\), for each \(x\in \mathbb {R}\), choose \(m=m(x)\in \left\{ 1,2,\ldots ,K\right\} \) so that
For \(j \ne m\) we have
Thus, we have
Recall that
We have
We see that f, g, r are polynomials in R, \(\partial _xR\), \(\partial _x^2R\), \(\partial _x^3R\), \(\partial _x\overline{R}\) and \(\partial _x^2\overline{R}\). Denote
We have
In particular,
Moreover,
Thus, using Hölder inequality we obtain
It follows that if \(t \gg \max \{\omega _1,\ldots ,\omega _K,|c_1|,\ldots ,|c_K|\}\) is large enough then
This implies the desired result. \(\square \)
3.2 Some Useful Estimates
Lemma 3.2
Fix \(\alpha ,\beta \in \mathbb {R}\) with \(\alpha +\beta >0\). We have
Proof
We may assume that \(w\ne 0\). We may assume \(w=1\) be replacing z by \(\frac{z}{w}\). Let
It suffices to show
When \(|z|\geqslant \frac{1}{2}\), we have \(|f(1)-f(0)| \lesssim |z|^{\alpha +\beta }\). When \(|z|<\frac{1}{2}\), we have \(f(1)-f(0)=f'(t)\) for some \(t\in (0,1)\) by mean value theorem, but \(\sup _{0<t<1}|f'(t)|\lesssim |z|\). This shows (3.3) and hence (3.2). \(\square \)
As a consequence of (3.2), we have the following result.
Lemma 3.3
Fix \(\alpha >0\). We have
Proof
Using (3.2) for \(\alpha =\beta \), we obtain (3.4). \(\square \)
Lemma 3.4
Let \(w_1,w_2,\eta _1,\eta _2\in \mathbb {C}\) and \(\sigma \geqslant \frac{3}{2}\). Define

Then
where \(|\eta |=|\eta _1|+|\eta _2|\) and \(|W|=|w_1|+|w_2|\).
Proof
We have
Moreover,
Thus, it suffices to check the other term. Rewrite
By (3.2),
where in the second estimate, the term \(|\eta _1|^{2\sigma -2}\) is superlinear provided \(\sigma \geqslant \frac{3}{2}\) and in the last estimate, we use the Cauchy inequality \(|W|^2|\eta |^{2\sigma -3} \lesssim |W|^{2\sigma -1}+|\eta |^{2\sigma -1}\) provided \(\sigma \geqslant \frac{3}{2}\). This implies the desired result. \(\square \)
Lemma 3.5
Let \(w,\eta \in \mathbb {C}\) and \(\sigma \geqslant 1\). We have
Proof
We have
We only need to treat the first term. The second term is similar. Using \(\sigma \geqslant \frac{3}{2}\) and (3.2), we have
\(\square \)
Lemma 3.6
Let u be defined as in (2.41). Then u is a solution of (1.1) on \((T_0,\infty )\). Moreover,
and
Proof
Since \(\psi =\partial _x\varphi -\frac{i}{2}|\varphi |^{2\sigma }\varphi \) and \((\varphi ,\psi )\) solves (2.3), we have
We recall that
Using (3.7) and (3.8), we may prove that u is a solution of (1.1).
Since (3.8), for each \(t>0\),
This implies (3.5).
Moreover, using (2.17), we have, for all \(t\geqslant T_0\),
Combining with (3.5), we obtain (3.6). This completes the proof. \(\square \)
3.3 Proof \(G(\varphi ,v)=Q(\varphi ,v)\)
Let \(G(\varphi ,v)\) be defined as in (2.19) and Q be defined as in (2.5). Then we have the following result.
Lemma 3.7
Let \(v=\partial _x\varphi -\frac{i}{2}|\varphi |^{2\sigma }\varphi \). Then the following equality holds:
Proof
We have

The term contains  in the expression of \(G(\varphi ,v)\) is the following.
in the expression of \(G(\varphi ,v)\) is the following.

which equals to the term contains  in the expression of \(Q(\varphi ,v)\). We only need to check the equality of the remaining terms. The remaining terms of \(G(\varphi ,v)\) is the following.
in the expression of \(Q(\varphi ,v)\). We only need to check the equality of the remaining terms. The remaining terms of \(G(\varphi ,v)\) is the following.


Noting that  and \(v=\partial _x\varphi -\frac{i}{2}|\varphi |^{2\sigma }\varphi \), we have
and \(v=\partial _x\varphi -\frac{i}{2}|\varphi |^{2\sigma }\varphi \), we have

Moreover, using  we have
we have

Combining the above expressions we obtain

This is exactly the remaining terms of \(Q(\varphi ,v)\). Thus, \(G(\varphi ,v)=Q(\varphi ,v)\). \(\square \)
3.4 Existence of a Solution of the System
In this section, using similar arguments as in [9, 10], we prove the existence of a solution of (2.13). For convenience, we recall the equation:
where
We have the following lemma.
Lemma 3.8
Let \(H=H(t,x):[0,\infty )\times \mathbb {R}\rightarrow \mathbb {C}^2\), \(W=W(t,x):[0,\infty )\times \mathbb {R}\rightarrow \mathbb {C}^2\) be given vector functions which satisfy for some \(C_1>0\), \(C_2>0\), \(\lambda >0\), \(T_0 \geqslant 0\):
Consider Eq. (3.11). There exists a constant \(\lambda _{*}\) independent of \(C_2\) such that if \(\lambda \geqslant \lambda _{*}\) then there exists a unique solution \(\eta \) of (3.11) on \([T_0,\infty ) \times \mathbb {R}\) satisfying
Proof
We rewrite (3.11) by \(\eta =\Phi \eta \). We show that, for \(\lambda \) large enough, \(\Phi \) is a contraction map in the following ball
We will use condition \(\lambda \gg 1\) in the proof without specifying it.
Step 1. Proof \(\Phi \) maps B into B
Let \(t \geqslant T_0\), \(\eta =(\eta _1,\eta _2) \in B\), \(W=(w_1,w_2)\) and \(H=(h_1,h_2)\). By Strichartz estimates, we have
For (3.15), using (3.12), we have
For (3.14), we have


Using the assumption \(\sigma \geqslant \frac{3}{2}\) and the inequality (3.4), we have
Moreover, using Lemma 3.4, we have
Thus, we obtain
Similarly,
Hence, using \(\sigma \geqslant \frac{3}{2}\), we have:
Combining with (3.16) and (3.14), (3.15) we obtain
We have
For (3.21), using (3.13) we have
For (3.20), we have
Furthermore,



For (3.23), using Lemma 3.5 and (3.2) we have
Thus,
For (3.24), using the inequality (3.4), we have

For (3.25), using the inequality (3.4), we have
Combining the above estimates, we obtain
Similarly,
Combining the estimates (3.20), (3.21), (3.22), (3.26) and (3.27), we have
Combining (3.19) with (3.28), we obtain
Thus, for \(\lambda \) large enough
This implies that \(\Phi \) maps B into B.
Step 2. \(\Phi \) is a contraction map on B
By using (3.12), (3.13) and a similar estimate of (3.29), we can show that, for any \(\eta \in B\) and \(\kappa \in B\) we have
for \(\lambda \) large enough. From Banach fixed point theorem, there exists a unique solution in B of (3.11) and thus a solution of (2.13). This completes the proof of Lemma 3.8. \(\square \)
Data Availability
All data generated or analysed during this study are included in this published article [and its supplementary information files].
References
Bai, R., Wu, Y., Xue, J.: Optimal small data scattering for the generalized derivative nonlinear Schrödinger equations. J. Differ. Equ. 269(9), 6422–6447 (2020)
Colin, M., Ohta, M.: Stability of solitary waves for derivative nonlinear Schrödinger equation. Ann. Inst. H. Poincaré Anal. Non Linéaire 23(5), 753–764 (2006)
Grillakis, M., Shatah, J., Strauss, W.: Stability theory of solitary waves in the presence of symmetry I. J. Funct. Anal. 74(1), 160–197 (1987)
Grillakis, M., Shatah, J., Strauss, W.: Stability theory of solitary waves in the presence of symmetry II. J. Funct. Anal. 94(2), 308–348 (1990)
Guo, Z., Ning, C., Wu, Y.: Instability of the solitary wave solutions for the generalized derivative nonlinear Schrödinger equation in the critical frequency case. Math. Res. Lett. 27(2), 339–375 (2020)
Hayashi, M., Ozawa, T.: Well-posedness for a generalized derivative nonlinear Schrödinger equation. J. Differ. Equ. 261(10), 5424–5445 (2016)
Kato, T.: Nonstationary flows of viscous and ideal fluids in \({ R}^{3}\). J. Funct. Anal. 9, 296–305 (1972)
Kwon, S., Wu, Y.: Orbital stability of solitary waves for derivative nonlinear Schrödinger equation. J. Anal. Math. 135(2), 473–486 (2018)
Le Coz, S., Li, D., Tsai, T.-P.: Fast-moving finite and infinite trains of solitons for nonlinear Schrödinger equations. Proc. R. Soc. Edinb. Sect. A 145(6), 1251–1282 (2015)
Le Coz, S., Tsai, T.-P.: Infinite soliton and kink-soliton trains for nonlinear Schrödinger equations. Nonlinearity 27(11), 2689–2709 (2014)
Le Coz, S., Wu, Y.: Stability of multisolitons for the derivative nonlinear Schrödinger equation. Int. Math. Res. Not. IMRN 13, 4120–4170 (2018)
Liu, X., Simpson, G., Sulem, C.: Stability of solitary waves for a generalized derivative nonlinear Schrödinger equation. J. Nonlinear Sci. 23(4), 557–583 (2013)
Martel, Y., Merle, F., Tsai, T.-P.: Stability and asymptotic stability in the energy space of the sum of \(N\) solitons for subcritical gKdV equations. Commun. Math. Phys. 231(2), 347–373 (2002)
Martel, Y., Merle, F., Tsai, T.-P.: Stability in \(H^1\) of the sum of \(K\) solitary waves for some nonlinear Schrödinger equations. Duke Math. J. 133(3), 405–466 (2006)
Ozawa, T.: On the nonlinear Schrödinger equations of derivative type. Indiana Univ. Math. J. 45(1), 137–163 (1996)
Santos, G.N.: Existence and uniqueness of solution for a generalized nonlinear derivative Schrödinger equation. J. Differ. Equ. 259(5), 2030–2060 (2015)
Tang, X., Xu, G.: Stability of the sum of two solitary waves for (gDNLS) in the energy space. J. Differ. Equ. 264(6), 4094–4135 (2018)
Acknowledgements
The author is supported by scholarship of MESR for his phD. This work is also supported by the ANR LabEx CIMI (Grant ANR-11-LABX-0040) within the French State Programme “Investissements d’Avenir. Finally, I wish to thank unknown referee for carefully reading and many useful discussion and nice questions, especially introducing Lemmas 3.2 and 3.4 which improve our result for \(\sigma \geqslant \frac{3}{2}\).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
I am the only author of this paper and there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Van Tin, P. Construction of Multi-solitons for a Generalized Derivative Nonlinear Schrödinger Equation. J Dyn Diff Equat (2023). https://doi.org/10.1007/s10884-023-10247-5
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10884-023-10247-5
Keywords
- Multi-solitons
- Nonlinear derivative Schrödinger equations
- Strichartz estimates
- Fixed point method
- Grönwall inequality