
Abstract
The dynamics of a diffusive predator–prey system with Holling type-III functional response subject to Neumann boundary conditions is investigated. The parameter region for the stability and instability of the unique constant steady state solution is derived, and the existence of time-periodic orbits and non-constant steady state solutions are proved by bifurcation method and Leray–Schauder degree theory. The effect of various parameters on the existence and nonexistence of spatiotemporal patterns is analyzed. These results show that the impact of Holling type-III response essentially increases the system spatiotemporal complexity.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
A fundamental goal of theoretical ecology is to understand how the interactions of individual organisms with each other and with the environment determine the distribution of populations and the structure of communities. In recent decades the role of spatial effects in maintaining biodiversity has received a great deal of attention in the literature on conservation, see for example [35, 57]. One way to try to understand how spatial effects such as habitat fragmentation influence populations and communities is by using mathematical models [6]. The dynamical relationship between predators and their prey has been investigated widely in recent years due to its universal existence and importance in mathematical biology and ecology. The spatiotemporal dynamics of a predator–prey system in a homogeneous environment can be described by a system of nonlinear parabolic partial differential equations or reaction–diffusion equations, see for examples in [41, 44, 48]:
where H(X, T) and P(X, T) are the densities of prey and predator at time T and position X respectively; here \(X\in \Omega _O\subseteq {\mathbb {R}}^n\) is the spatial habitat of the two species; the Laplacian operator \(\Delta \) describes the spatial dispersal with passive diffusion; \(D_1\) and \(D_2\) are the diffusion coefficients of species and k is the food utilization coefficient. The function F(H) describes the per capita growth rate of the prey, G(H) is the functional response of the predator, which corresponds to the saturation of their appetites and reproductive capacity, and M(P) stands for predator mortality.
The functions F(H), G(H) and M(P) can be of different types in various specific situations. Since the first differential equation model of predator–prey type Lotka–Volterra equation was formulated [43, 61] in 1920s, a logistic type growth F(H) is usually assumed for the prey species in the models, while a linear mortality rate M(P) is assumed for the predator. Some conventional functional response functions G(H) include Holling type I, II, III (see [30, 62]), Ivlev type (see [36]), Beddington–DeAngelis type (see [4, 15]). the Crowley–Martin type (see [12]), and the recent well-known ratio dependence type, which was first proposed by Arditi and Ginzburg (see [2]). Of them, the Holling type I-III was labeled prey-dependent(see [34]) and the other types that consider the interference among predators were labeled predator-dependent (see [2]).
When F(H) is of a logistic growth, the dynamics of (1.1) has been considered in many articles. [18–20, 63, 67, 70] consider the bifurcation solutions and pattern formations of traditional Holling Type II functional response used to describe the plant consumption by the herbivore in the interaction of plant and herbivore; Wang et al. [62] investigates the global dynamics of traditional Holling Type II functional response and strong Allee effect growth. Strongly coupled parabolic and elliptic predator–prey models have received considerable attention in [16, 17, 21, 22, 39, 40, 47, 49, 54].
Since the traditional Holling III predator–prey model received great attention among theoretical and mathematical biologists, we will focus our attention here on the following reaction diffusion system:
where \(\Omega \) is a bounded domain in \({\mathbb {R}^N}\)(\(N \ge 1\)) with a smooth boundary \(\partial \Omega \); n is the unit outer normal, and no flux boundary condition is imposed so the system is a closed one; \(U=U(x,t)\) and \(V=V(x,t)\) represent the densities of the prey and predator at time \(t>0\) and a spatial position \(x \in \Omega \) respectively; \(d_1, d_2>0\) are the diffusion coefficients of the species; the parameters A, B, C, D, H are positive real numbers,the prey population follows a logistic growth and A is the intrinsic growth rate; H is the carrying capacity; C is the death rate of the predator; B and D represent the strength of the relative effect of the interaction on the two species; the function \(\dfrac{U^{p}}{\alpha ^{p} + U^{p}}\) denotes the functional response of the predator to the prey density (see [9]), which refers to the change in the density of prey attached per unit time per predator as the prey density changes. The topical Holling Type II functional response is referred to \(p=1\), Holling Type III functional response with \(p=2\), both of which are monotonic increasing function with respect to the prey U.
By rescaling as follows:
(1.2) with Holling III functional response is equivalently rewritten as:
where d is the death rate of the predator, m is the strength of the interaction and \(a, d_1, d_2\) are positive constants. System (1.3) is an important model on population dynamics (refer to [24, 31, 38, 53] and references therein). Many attempts have been made to give sufficient conditions and necessary conditions to guarantee the existence and the uniqueness of limit cycles of kinetic system of (1.3). For example, see [10, 33, 59]. Recently, Eduardo and Alejandro [23] described the multiple limit cycles in a Gause Type predator–prey model with Holling Type III functional response and Allee effect on prey. For the diffusive predator prey system (1.3), Li and Wu [42] established the existence of traveling wave solutions and small amplitude traveling wave train solutions; Su et al. [58] investigated dynamic complexities with impulsive effects; Das and Kar [13] highlighted a delayed predator-prey model with Holling type III functional response and harvesting to predator; Song and Wan [56] focused on the Hopf bifurcation analysis.
In the early 1950s, the British mathematician Turing [60] proposed a model that accounts for pattern formation in morphogenesis. Turing showed mathematically that a system of coupled reaction–diffusion equations could give rise to spatial concentration patterns of a fixed characteristic length from an arbitrary initial congratulation due to so called diffusion-driven instability, that is, diffusion could destabilize an otherwise stable equilibrium of the reaction–diffusion system and lead to nonuniform spatial patterns. Turing’s analysis stimulated considerable theoretical research on mathematical models of pattern formation, and a great deal of research have been devoted to the study of Turing instability in chemical and biology contexts, see for example, [3, 5, 8, 25, 37, 50, 69] for Brusselator model; [14, 51] for Gray–Scott model; [45, 66] for Lengyel–Epstein model, and [26, 65] for Schnakenberg model.
In this paper, our main contribution is a comprehensive mathematical study of (1.3). In particular we are interested in the spatiotemporal pattern formations and bifurcations in the model, and the effect of system parameters and diffusion coefficients on the model dynamics. The organization of the remaining part of the paper is as follows. In Sect. 2, we obtain the existence and boundedness of solutions to system (1.3). In Sect. 3, we analyze the stability of the constant steady state, and we obtain the global stability by constructing Lyapunov functionals. Also we use bifurcation theory to prove the existence of periodic orbits. In Sect. 4, we prove the existence and non-existence of positive non-constant steady state solutions by using a priori estimates, energy estimates and Leray–Schauder degree theory and bifurcation theory. Throughout this paper, \(\mathbb {N}\) is the set of natural numbers and \(\mathbb {N}_0=\mathbb {N}\cup \{0\}\). The eigenvalues of operator \(-\Delta \) with homogeneous Neumann boundary condition in \(\Omega \) are denoted by \(0=\mu _0<\mu _1\le \mu _2 \le \cdots \le \cdots \), and the eigenfunction corresponding to \(\mu _n\) is \(\phi _n(x)\).
2 Basic Dynamics of the Reaction–Diffusion System
The global existence and boundedness of the non-negative solutions to (1.3) can be obtained from a general result of Hollis, Martin and Pierre [32] (see Theorems 1 and 2). Here we can show the precise bounds of the solutions:
Lemma 2.1
Suppose that \(\left( u(x,t),v(x,t)\right) \) is a nonnegative solution of (1.3). Then (u(x, t), v(x, t)) must satisfy \(\displaystyle \limsup _{t\rightarrow +\infty }u(x,t)\le 1\), \(\int _{\Omega }v(x,t)dx\le 1+|\Omega |/(4d)\) as \(t\rightarrow \infty \). Furthermore, \(\displaystyle \limsup _{t\rightarrow +\infty } v(x,t)\le C\) with C independent of \(u_0,v_0,d_1,d_2\) but only on a lower bound of \(d_2\).
Proof
Let \(\left( u(x,t), v(x,t)\right) \) be the unique non-negative solution of (1.3). Then the first equation of (1.3) shows that:
It is well-known that
is a gradient system, and every orbit of (2.2) converges to the unique positive steady state \(u=1\) (see [11, 27]). Then from the comparison principle of parabolic equation, the solution u(x, t) to (1.3) satisfies \(\displaystyle \limsup _{t\rightarrow +\infty }u(x,t)\le 1\).
For the estimate of v(x, t), let \(\int _{\Omega }u(x,t)dx=U(t)\), \(\int _{\Omega }v(x,t)dx=V(t)\), then
Adding (2.3) and (2.4), we obtain
Integration of the inequality leads to
From (2.5), we know that any solution v(x, t) satisfies an \(L^1\) a priori estimate \(K_1=1+|\Omega |/(4d)\), which only depends on d and \(\Omega \). Furthermore we can use the \(L^1\) bound to obtain an \(L^{\infty }\) bound C, such that \(\displaystyle \limsup _{t\rightarrow +\infty } v(x,t)\le C\) with C independent of \(u_0,v_0,d_1,d_2\) but only on a lower bound of \(d_2\) (see Theorem 3.1 in [1] and Lemma 4.7 in [7]). \(\square \)
3 Stability Analysis and Oscillatory Patterns
In this section, we will analyze the stability of the positive equilibrium and Hopf bifurcations.
3.1 Local and Global Stability
System (1.3) has three nonnegative constant equilibrium solutions: (0, 0), (1, 0) and (\(\lambda \), \(v_{\lambda })\), where (\(\lambda \), \(v_{\lambda })\) satisfies
Clearly, the positive equilibrium solution (\(\lambda \), \(v_{\lambda }\)) exists if and only if \(0< \lambda <1\). In the proceeding discussion, we fix parameters \(a, m, d_1, d_2\) and choose \(\lambda \) (or equivalently d) as the bifurcation parameter. Linearizing the system (1.3) about the positive equilibrium \((\lambda , v_{\lambda })\), we obtain an eigenvalue problem
where
Denote
For each \(n\in \mathbb {N}_0\), we denote a \(2\times 2\) matrix:
Then the following statements hold true by using Fourier decomposition:
-
(1)
If \(\mu \) is an eigenvalue of (3.2), then there exists \(n\in \mathbb {N}_0\) such that \(\mu \) is an eigenvalue of \(L_n(\lambda )\).
-
(2)
The positive equilibrium \((\lambda ,v_{\lambda })\) is locally asymptotically stable with respect to (1.3) if and only if for every \(n\in \mathbb {N}_0\), all eigenvalues of \(L_n(\lambda )\) have negative real part.
-
(3)
The positive equilibrium \((\lambda ,v_{\lambda })\) is unstable with respect to (1.3) if there exists an \(n\in \mathbb {N}_0\) such that \(L_n(\lambda )\) has at least one eigenvalue with nonnegative real part.
Now the characteristic equation of (3.4) is given by:
where
Then \((\lambda ,v_{\lambda })\) is locally asymptotically stable if \(T_n(\lambda )<0\) and \(D_n(\lambda )>0\) for all \(n\in \mathbb {N}_0\), and \((\lambda ,v_{\lambda })\) is unstable if there exists \(n\in \mathbb {N}_0\) such that \(T_n(\lambda )>0\) or \(D_n(\lambda )<0\). To obtain more precise stability results, we define \(h(\lambda ): =v_{\lambda }\), then
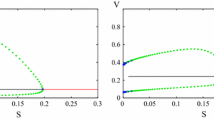
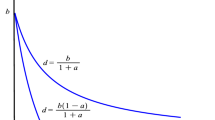
In particular, the signs of \(h'(\lambda )\) and \(A(\lambda )\) are identical for all \(\lambda \). By \(h'(\lambda )=h''(\lambda ) =0\), we get \(a=a^{*}=\sqrt{3}/9\). After straight forward calculations, we have the following properties of the functions of \(h(\lambda )\) (see Fig. 1):

(left) \(a>a^*\), parameter \(a=2\); (right) \(0<a<a^*\), parameter \(a=0.15\) with \(\lambda _{*}=0.1149\), \(\lambda _{1}=0.191\), \(\lambda _{2}=0.443\), \( \lambda ^{*}=0.6186\)
Lemma 3.1
If \(a>a^*\), then \(h(\lambda )\) is strictly decreasing for all \(\lambda >0\); If \(0<a<a^*\), then there exists \(\lambda _*,\lambda _1,\lambda _2,\lambda ^*\in (0,1)\) with \(0<\lambda _*<\lambda _1<\lambda _2<\lambda ^*<1\) such that \(h(\lambda )\) is strictly decreasing in \((0,\lambda _1)\cup (\lambda _2,\infty )\) and strictly increasing in \((\lambda _1, \lambda _2)\), where \(h'(\lambda _1)=h'(\lambda _2)=0\) and \(h(\lambda _*)=h(\lambda _2)\), \(h(\lambda ^*)=h(\lambda _1)\). Moreover, there exists a unique \(\lambda _3\in (\lambda _1,\lambda _2)\) such that \(h'(\lambda )>0\) in \((\lambda _1,\lambda _3)\) and \(h'(\lambda )<0\) in \((\lambda _3,\lambda _2)\).
Proof
In fact, \(h''(\lambda )=\dfrac{2(a^2-\lambda ^3)}{m\lambda ^3}\) leads to the existence of the unique \(\lambda _3\in (\lambda _1,\lambda _2)\). \(\square \)
Now we can give a stability result regarding the constant equilibrium \((\lambda , v_{\lambda })\) by the analysis above and the restriction on a.
Suppose that \(a>a^*\) holds. Then, for any \(n\in \mathbb {N}_0\) and \(0<\lambda <1\), we have \(T_n(\lambda )< 0\) since \(A(\lambda )<0\) and \(D_n(\lambda )>0\) since \(-B(\lambda )C(\lambda )=\dfrac{2m\lambda ^{2}(1-\lambda )a^{2}}{(a^{2}+\lambda ^{2})^{2}}>0\) . Therefore, all eigenvalues of the operator \(L_n(\lambda )\), \(n\in \mathbb {N}_0\) have strictly negative real parts. Hence the positive equilibrium \((\lambda , v_{\lambda })\) is locally asymptotically stable for the reaction–diffusion system (1.3). In addition, the theorem below shows that if \(a>a^*\), then the locally asymptotic stability of \((\lambda , v_{\lambda })\) implies the globally asymptotic stability of \((\lambda ,v_{\lambda })\) for the reaction–diffusion system (1.3):
Theorem 3.2
Suppose that \(m,d_1,d_2>0\), \(a>a^*\) and \(0<\lambda <1\). Then \((\lambda ,v_{\lambda })\) is globally asymptotically stable in \(\{(u,v): u\ge 0, v\ge 0\}\) for the system (1.3).
Proof
We define the following Lyapunov functional \(E:C(\bar{\Omega })\times C(\bar{\Omega })\rightarrow {\mathbb {R}}\):
where \(g(u)=\dfrac{u^2}{a^2+u^2}\). Then
where \(z(u)=\dfrac{(1-u)(a^2+u^2)}{u}\), and
Notice that
for all \(u>0\) from Lemma 3.1. Therefore,
which implies that E decreases monotonically along the solution orbit. Then, it follows that for any \(0<\lambda <1\), the unique positive equilibrium \((\lambda ,v_{\lambda })\) of the reaction–diffusion system (1.3) is globally asymptotically stable in \({\mathbb {R}}^2_{+}\) by [14, 68]. \(\square \)
Suppose that \(0<a<a^*\) holds , we have the following stability of \((\lambda , v_{\lambda })\):
Theorem 3.3
-
(1)
If \(\lambda \in (0,\lambda _*)\cup (\lambda ^*,1)\), then \((\lambda , v_{\lambda })\) is globally asymptotically stable;
-
(2)
If \(\lambda \in (\lambda _*,\lambda _1)\cup (\lambda _2,\lambda ^*)\), then \((\lambda , v_{\lambda })\) is locally asymptotically stable;
-
(3)
If \(\lambda \in (\lambda _1,\lambda _2)\), then \((\lambda , v_{\lambda })\) is unstable.
Proof
-
1.
From the discussion above and Theorem 3.2, when \(0<a<a^{*}\) and \(\lambda \in (0, \lambda _{*})\) or \(\lambda \in (\lambda ^{*}, 1)\), \(A(\lambda )<0\) and
$$\begin{aligned} \left[ g(u)-g(\lambda )\right] \left[ z(u)-z(\lambda )\right] \le 0 . \end{aligned}$$still hold. So the same Lyapunov function can still be used.
-
2.
If \(\lambda \in (\lambda _*,\lambda _1)\cup (\lambda _2,\lambda ^*)\), then \(A(\lambda )<0\). Therefore, for any \(n\in \mathbb {N}_0\) and \(0<\lambda <1\), we have \(T_n(\lambda )< 0\) and \(D_n(\lambda )>0\).
-
3.
If \(\lambda \in (\lambda _1,\lambda _2)\), then \(A(\lambda )>0\). For \(i=0\),
$$\begin{aligned} \text {trace} (T_0)=A(\lambda )>0, \end{aligned}$$which implies that (3.5) has at least one root with positive real part.
\(\square \)
It is pointed out that the positive equilibrium \((\lambda ,v_{\lambda })\) does not exist if \(\lambda >1\). In this case, we can show that the boundary equilibrium (1, 0) is globally stable for all \(a>0\).
Theorem 3.4
Suppose that \(a,m,d_1,d_2>0\). If \(\lambda >1\) (equivalently \(d>m/(a^2+1)\)), then (1, 0) is globally asymptotically stable to the system (1.3).
Proof
When \(\lambda >1\), we construct a similar Lyapunov functional as follows:
where \(g(u)=\dfrac{u^2}{a^2+u^2}\). Then
where
Recall \(u(x,t)\le 1\) as \(t\rightarrow +\infty \) and \(g'(u)=\dfrac{2a^{2}u}{(a^2+u^2)^2}>0\) for all \(u>0\). Therefore, \(E_{t}(u,v)\le 0\) if \(\lambda >1\) (equivalently \(d>m/(a^2+1)\)), which again implies that E decreases monotonically along the solution orbit. It follows that the equilibrium (0, 1) of the reaction–diffusion system (1.3) is globally asymptotically stable. \(\square \)
Remark 3.5
Compared with the reaction–diffusion system, it is more feasible to observe the dynamics as the parameter \(\lambda \) changes for the ODE system. Here we collect some known results on the ODE dynamics of (1.3) (see for example [33, 59]) via some phases portraits, see Figs. 2 and 3.

\(a=0.3>a^*\). (left) \(d=0.6\), \((\lambda ,v_{\lambda })\) is globally stable in \({\mathbb {R}}^2_{+}\); (middle) \(d\approx 0.15\), then \(\lambda <\lambda _1\approx 0.19\), \((\lambda ,v_{\lambda })\) is globally stable in \({\mathbb {R}}^2_{+}\); (right) \(d\approx 0.64\), then \(0.44 \approx \lambda _2>\lambda >\lambda _1\approx 0.19\), there exists a unique limit cycle

\(a=0.15<a^*\). (left) \(d\approx 0.95\) and \(\lambda >\lambda _2\), \((\lambda ,v_{\lambda })\) is globally stable in \({\mathbb {R}}^2_{+}\); (right) \(d\approx 0.99\) and (1, 0) is globally stable in \({\mathbb {R}}^2_{+}\)
3.2 Bifurcation Analysis and Oscillatory Patterns
In this subsection, we investigate the Hopf bifurcations from the positive equilibrium \((\lambda ,v_{\lambda })\) for (1.3), and we will show the existence of spatially homogeneous and spatially inhomogeneous periodic orbits of system (1.3). In this subsection, we assume that all eigenvalues \(\mu _i\) of \(-\Delta \) in \(H_1(\Omega )\) are simple, and denote the corresponding eigenfunction by \(\phi _i(x)\) where \(i\in \mathbb {N}_0\). Note that this assumption always holds when \(\mathbb {N}=1\) for domain \((0,l\pi )\), as for \(i\in \mathbb {N}_0\), \(\mu _i=i^2/l^2\) and \(\phi _i(x)=\cos (ix/l)\), where l is a positive constant; and it also holds for generic class of domains in higher dimensions.
From [62, 67], it follows that if for certain critical value \(\lambda ^H\), there exists \(n\in \mathbb {N}_0\), such that
and for unique pair of complex eigenvalues near the imaginary axis \(\alpha (\lambda ) \pm i \omega (\lambda )\) ,
then there is a Hopf bifurcation emanating from the unique constant steady state \((\lambda ,v_{\lambda })\) near \(\lambda =\lambda ^H\).
Theorem 3.3 implies that the trivial steady state \((\lambda ,v_{\lambda })\) is globally asymptotically stable for all \(\lambda \) if \(a>a^*\) and locally asymptotically stable for \(\lambda \in (0,\lambda _1)\cup (\lambda _2,1)\) if \(0<a<a^*\). Hence any potential Hopf bifurcation point \(\lambda ^H\) must be in the interval \(\lambda \in [\lambda _1,\lambda _2]\) for \(0<a<a^*\).
Firstly, \(\lambda _1^H=\lambda _1\), \(\lambda _2^H=\lambda _2\) are always Hopf bifurcation points since \(T_0(\lambda _{1,2}^H)=A(\lambda _{1,2}^H)=0\) and \(T_j(\lambda _{1,2}^H)=-(d_1+d_2)\mu _j<0\) for any \(j\ge 1\); and
for any \(j\in {\mathbb N}_0\). This corresponds to the Hopf bifurcation of spatially homogeneous periodic orbits which have been known from the studies in [33]. Apparently \(\lambda _{1,2}^H\) are also the two unique value \(\lambda \) for the Hopf bifurcation of spatially homogeneous periodic orbits from the uniqueness result of limit cycle in [23, 33].

The figure of \(A(\lambda )\), parameter a = 0.15
Hence in the following we search for spatially non-homogeneous Hopf bifurcations for \(i\ge 1\). From Eq.(3.6), it follows that \(T_n(\lambda )=0\) is equivalent to
Notice that \(A(\lambda _1)=A(\lambda _2)=0\) and \(A(\lambda )>0\) in \((\lambda _1,\lambda _2)\). Denote \(A(\lambda )\) achieves a local maximum \(A(\lambda _{1*})=M^*\) in \((\lambda _1,\lambda _2)\), see Fig. 4.
From Lemma 3.1, we define \(\lambda _{i,\pm }^H\) to be the two solution of \(A(\lambda )=(d_1+d_2)\mu _i\) satisfying \(\lambda _1<\lambda <\lambda _2\). These points satisfy
where m is the largest integer so that \(\mu _m\le M^*/(d_1+d_2)\).
Clearly \(T_i(\lambda _{i,\pm }^H)=0\) and \(T_j(\lambda _{i,\pm }^H)\ne 0\) for any \(j\ne i\). We will derive the condition \(D_i(\lambda _{i,\pm }^H)>0\) hold for all i satisfying \(1\le i\le m\). In fact, if \(\lambda _{i,\pm }\in (\lambda _1,\lambda _2)\), then
if \(d_1, d_2\) satisfy
Finally let the eigenvalues close to the pure imaginary one near at \(\lambda =\lambda _{i,\pm }^H\), \(0\le i\le m\) be \(\alpha (\lambda )\pm i\omega (\lambda )\). Then
and
Hence the transversality condition is always satisfied as long as \(\lambda _{i,\pm }^H\ne \lambda _{1*}\).
Summarizing our analysis above, by using the Hopf bifurcation theorem in [67], we obtain our main result in this subsection:
Theorem 3.6
Recall \(A(\lambda )\) reaches its maximum \(A(\lambda _{1*})=M^*\) in \((\lambda _1,\lambda _2)\). Suppose that \(m>0\), \(0<a<a^*\) and the constants \(d_1, d_2\) satisfy (3.10). Let \(\Omega \) be a bounded smooth domain so that the spectral set \(S=\{\mu _i\}_{i\in \mathbb {N}_0}\) satisfies that:
-
(S1)
All eigenvalues \(\mu _i\) are simple for \(i\in \mathbb {N}_0\).
Then there exist \(2(m+1)\) points \(\lambda ^{H}_{j,\pm }\) satisfying
such that the system (1.3) undergoes a Hopf bifurcation at \(\lambda =\lambda ^{H}_{j,\pm }\) or \(\lambda =\lambda _{1, 2}^{H}\), and the bifurcating periodic orbits near near \((\lambda ,v_{\lambda })\) can be parameterized in the form:
for \(s\in (0,\delta )\), where \(\omega (\lambda _i^H)=\sqrt{D_i(\lambda _i^H)}\) is the corresponding time frequency, \(\phi _i(x)\) is the corresponding spatial eigenfunction, and \((e_i,f_i)\) is a corresponding eigenvector. Moreover,
-
(1)
The periodic solutions bifurcating from \(\lambda =\lambda _{1, 2}^{H}\) are spatially homogeneous, which coincides with the periodic solutions of the corresponding ODE system.
-
(2)
The bifurcating periodic solutions from \(\lambda =\lambda ^{H}_{j,\pm }\) are spatially nonhomogeneous.
The spatially nonhomogeneous periodic orbits bifurcating from \(\lambda _{j,\pm }^H\), \(1\le j\le m\) are all unstable as \(L(\lambda _{j,\pm }^H)\) possesses at least one pair of eigenvalues with positive real part.
Relying on the abstract results obtained in [67] or [28], we can determine the stability and bifurcation direction of the homogeneous periodic solutions. To that end, we calculate \(Re(c_1(\lambda _{1, 2}^H))\) in the context of [67] when \(\Omega =(0,l\pi )\).
According to \(c_1(\lambda _0^H)\) of the definition in references [67], we need to calculate the symbols of \(Re(c_1(\lambda _{1, 2}^H))\). To simplify the notation, we denote \(\lambda _0=\lambda _{1, 2}\) in the following calculation. Let
where
Recall that in our context,
Then the direct calculation can lead to
and
Hence it is straightforward to obtain
which implies that \(\omega _{20}=\omega _{11}=0\). So
Therefore,
Let \(M=a^{6}+a^4(\lambda _{1, 2}^H)^3 -9a^2(\lambda _{1, 2}^H)^4 +8a^2(\lambda _{1, 2}^H)^5-(\lambda _{1, 2}^H)^7\). Recall \(\lambda _1^H, \lambda _2^H\) are the two positive roots of \(\mathcal {A}(\lambda )=-2\lambda ^3+\lambda ^2-a^2=0\). It is easy to verify \(\mathcal {A}(a)<0\) and \(\mathcal {A}(1/3)>0\). Combining \(0<a<a^*=\sqrt{3}/9<1/3\), we can obtain \(a<\lambda _1^H<\lambda _2^H<1\). Then
Combining the symbols of \(Re(c_1(\lambda _{1, 2}^H))\) and the transaction condition (3.12), we have the following stability of homogeneous periodic solutions bifurcating from the positive equilibrium of (1.3):
Theorem 3.7
The Hopf bifurcation at \(\lambda =\lambda _1\) is forward and the corresponding bifurcating spatially homogeneous periodic solutions are always locally orbitally stable; the Hopf bifurcation at \(\lambda =\lambda _2\) is backward and the corresponding bifurcating spatially homogeneous periodic solutions are always locally orbitally stable.
Proof
It has been observed that \(T_0(\lambda _{1,2}^H)=0\), \(T_j(\lambda _{1,2}^H)=-(d_1+d_2)\mu _j<0\) for any \(j\ge 1\); and
for any \(j\in {\mathbb N}_0\). Therefore, at \(\lambda _0=\lambda _{1,2}^H\), apart from the purely imaginary eigenvalues, all the other eigenvalues of the linearized operators have strictly negative real parts. Thus the bifurcating periodic solutions are stable when \(Re(c_1(\lambda _{1,2}^H))<0\) (also see [28]).
Moreover, \(\alpha '(\lambda _1^H)>0\) and \(\alpha '(\lambda _2^H)<0\). Then the conclusion can be obtained from Theorem 2.3 in [67]. \(\square \)
We find that \(M<0\) always holds for all \(a\in (0,a^*)\), which also identifies the uniqueness of limit cycle for the corresponding ODE system (see [10, 33, 59]). One condition to ensure the uniqueness of limit cycle in [59] is \(\lambda <(2d-m)/(2d)\). Since the values of \(\lambda _1, \lambda _2\) are only determined by a, Theorem 3.7 implies that the limit cycle bifurcating is unique if \(\lambda _2<1-m/(2d)\) for fixed \(m>0, 0<a<a^*\). Specifically, we can give the homogeneous periodic solutions of the system (1.3) (see Figs. 5, 6) with parameters \(a=0.15, m=1\) and \(\Omega =(0,3\pi )\).

The periodic solutions of the system (1.3), where the initial value \((u_0(x)=0.1374, v_0(x)=0.267)\), \(d=0.6185\) and \(\lambda _1\approx 0.191\)

Periodic solutions of the system (1.3), where the initial value \((u_0(x)=\cos (x)+1.5, v_0(x)=\sin (x)+1.6)\), \(d=0.8971\) and \(\lambda _2\approx 0.443\)
4 Analysis of the Steady State Solutions
In this section we discuss the existence and nonexistence of non-constant positive steady state solutions of (1.3), which satisfies:
Throughout the remaining part of this paper, the solutions refer to the classical solutions, by which we mean solutions in \(C^2(\Omega )\cap C^1(\overline{\Omega })\). We will give a priori upper and lower bounds for the positive solutions of (4.1).
4.1 A Priori Estimates and Nonexistence of Solutions
In this subsection we discuss the nonexistence of non-constant positive solutions to (4.1). To derive some a priori estimates for nonnegative solutions of (4.1), we recall the following maximum principle ([52]):
Lemma 4.1
Let \(\Omega \) be a bounded Lipschitz domain in \(\mathbb {R}^n\), and let \(g\in C(\overline{\Omega }\times \mathbb {R})\). If \(z\in H^{1}(\Omega )\) is a weak solution of the inequalities
and if there is a constant K such that \(g(x,z)<0\) for \(z>K\), then \(z\le K\) a.e. in \(\Omega \).
Firstly we have the following a priori estimate for any nonnegative solution to (4.1):
Lemma 4.2
Suppose that \(\left( u(x),v(x)\right) \) is a nonnegative solution of (4.1). Then either (u, v) is one of constant solutions: (0, 0), (1, 0), or for \(x\in \overline{\Omega }\), \(\left( u(x),v(x)\right) \) satisfies
where \(d,d_1,d_2>0\).
Proof
Let \(\left( u(x),v(x)\right) \) be a nonnegative solution to (4.1). If there exists \(x_0\in \overline{\Omega }\) such that \(v(x_0)=0\), then \(v(x)\equiv 0\) from the strong maximum principle and u(x) satisfies
From Theorem 10.1.6 of [29], \(u\equiv 0\) or \(u\equiv 1\). Hence if (u, v) is not (0, 0) or (1, 0), then \(u(x)>0\) and \(v(x)>0\) for \(x\in \overline{\Omega }\).
From Lemma 4.1, \(u(x)\le 1\) and from the strong maximum principle, \(u(x)<1\) for all \(x\in \overline{\Omega }\). By adding the two equations in (4.1), we have
Then Lemma 4.1 and the maximum principle implies that
which implies the desired estimate. \(\square \)
Now we can obtain the nonexistence of positive steady state solutions for some parameters.
Corollary 4.3
Suppose \(d_1,d_2>0\) and \(\Omega \) is a bounded domain with smooth boundary. Let (u(x), v(x)) be a nonnegative solution to (4.1). If \(\lambda \ge 1\), then (u(x), v(x)) is either (0, 0) or (1, 0).
Proof
From Lemma 4.2, \(u(x)\le 1\) and \(\displaystyle -d+m/(a^2+1)\le 0\). By integrating the second equation of (4.1), we obtain
Hence \(v\equiv 0\) on \(\overline{\Omega }\). \(\square \)
Moreover, we can show that the nonexistence of positive steady state solutions when the diffusion coefficients \(d_1\) and \(d_2\) are large.
Theorem 4.4
For any fixed \(d>0\), there exists \(d^*=d^*(d,\Omega )\) such that if \(\min \{d_1, d_2\}>d^*\), then the only nonnegative solutions to (4.1) are (0, 0), (1, 0) and \((\lambda ,v_{\lambda })\). \(\square \)
Proof
Let (u, v) be a nonnegative solution to (4.1), and denote \(\bar{u}=|\Omega |^{-1}\int _{\Omega } u dx\), \(\bar{v}=|\Omega |^{-1}\int _{\Omega } v dx\). Then
Multiplying the first equation in (4.1) by \(u-\bar{u}\) and applying Lemma 4.2, we get
Furthermore, adding the two equations in (4.1) and integrating over \(\Omega \), we get
then the Neumann boundary conditions lead to
Thus
In a similar manner, we multiply the second equation in (4.1) by \(v-\bar{v}\) to have
From (4.5), (4.9) and the Poincaré inequality, we obtain that
where
This shows that if
then
and (u, v) must be a constant solution. \(\square \)
4.2 Existence of Non-constant Positive Steady State Solutions
In this subsection we use degree theory to prove the existence of non-constant solutions to (4.1) for certain parameter range. For that purpose, we cite a Harnack inequality for weak solutions in [52].
Lemma 4.5
Let \(\Omega \) be a bounded Lipschitz domain in \(\mathbb {R}^n\), and let \(c(x)\in L^q(\Omega )\) for some \(q>n/2\). If \(z\in H^1(\Omega )\) is a nonnegative weak solution of the boundary value problem
then there is a constant \(C_1\), determined only by \(\parallel c\parallel _q\), q and \(\Omega \) such that
Based on the above preparation, we are ready to derive a priori upper and lower bounds for all positive solutions to (4.1). More precisely, we have
Theorem 4.6
Let \(\Omega \) be a bounded smooth domain in \(\mathbb {R}^n\). Then, for \(\sigma \le \lambda \le 1\) with some \(\sigma >0\) small enough, there exist two positive constants \(\underline{\mathcal {C}}\) and \(\overline{\mathcal {C}}\) with \(\underline{\mathcal {C}}<\overline{\mathcal {C}}\) depending possibly on \(d_1,d_2, d, \sigma \) and \(\Omega \), such that any positive solution \(\left( u(x),v(x)\right) \) of (4.1) satisfies
Proof
From Lemma 4.2, we obtain that for any \(x\in \overline{\Omega }\),
where \(\overline{\mathcal {C}}\) depends on \(d_1,d_2,d\).
Now we give the lower bound. Let
then the mean value theorem implies that
Then we have
Lemma 4.5 implies that there exists a positive constant \(C_2\) depending on \(d_1,d_2, d\) and \(\Omega \) such that
Hence it remains to prove that there exists \(C_3>0\) such that
Suppose this is not true, then there exists a sequence of positive solutions \((u_n(x),v_n(x))\) such that
From the Sobolev embedding theorem and elliptic estimates, there exists a subsequence of \((u_n, v_n)\), which we still denote by \((u_n, v_n)\), such that \(u_n\rightarrow u_0\) and \(v_n\rightarrow v_0\) in \(C^2(\overline{\Omega })\) as \(n\rightarrow +\infty \). Observe that \(u_0\le 1\) and from (4.12), either \(u_0\equiv 0\) or \(v_0\equiv 0\) and \((u_0,v_0)\) satisfies (4.1). Therefore, we have the following two cases:
-
(i)
\(u_0\equiv 0\), \(v_0\not \equiv 0\); or \(u_0\equiv 0\), \(v_0\equiv 0\).
-
(ii)
\(u_0\not \equiv 0\), \(v_0\equiv 0\).
Since \((u_n,v_n)\) is a positive solution of (4.1), we can obtain the following integral equation by integrating the second equation in (4.1) for \(v_n\) over \(\Omega \),
-
(i)
If \(u_0\equiv 0\), then we have
$$\begin{aligned} -d+g(u_n)\rightarrow -d+g(u_0)=-g(\lambda )+g(0)\le -g(\sigma )<0 \end{aligned}$$for any \(x\in \overline{\Omega }\) as \(n\rightarrow \infty \). Since \(v_n>0\), then for sufficient large n, we obtain
$$\begin{aligned} \int _{\Omega }v_n\left( -d+g(u_n)\right) dx<0, \end{aligned}$$(4.13)that is a contradiction.
-
(ii)
If \(u_0\not \equiv 0\) and \(v_0\equiv 0\), then this implies that \(u_0\) satisfies (4.3). So \(u_0\equiv 1\) for large n. Thus, we have
$$\begin{aligned} -d+g\left( u_n\right) \rightarrow -d+g(1)\ge 0 \end{aligned}$$for large n since \(d=g(\lambda )\le g(1)\).
Then the contradiction with (4.13) is reached. Therefore (4.11) holds and we complete the proof. It is remarkable that the lower bound \(\underline{\mathcal {C}}\) depends only on \(d_1,d_2, d\). \(\square \)
Recall the definition of \(\underline{\mathcal {C}}\) and \(\overline{\mathcal {C}}\) from Theorem 4.6, we set
Denote \(\mathbf {u}=(u,v)\) and \(e^*=(\lambda ,v_{\lambda })\), and
where \(A(\lambda ), B(\lambda ), C(\lambda )\) are defined as in Sect. 2.2. Thus, (4.1) can be written as
with \(\Phi (\mathbf {u})=(d_1u, d_2v)^T\). Since the determinant \(det \Phi (\mathbf {u})\) is positive for all non-negative \(\mathbf {u}\), \(\Phi _{\mathbf {u}}^{-1}\) exists and for \(\sigma \le \lambda < K\), \(\mathbf {u}\) is a positive solution of (4.14) if and only if
And \((\mathbf {I}-\Delta )^{-1}\) is the inverse of \(\mathbf {I}-\Delta \) in \(\mathbf {X}\) with the Neumann boundary condition. As \(\mathcal {F}(d_1, d_2, \lambda ; \cdot )\) is a compact perturbation of the identity operator, the Leray–Schauder degree \(deg(\mathcal {F}(d_1, d_2, \lambda ; \cdot ), \Lambda , 0)\) is well defined from Theorem 4.6, and by the homotopy invariance, it is constant for all \(\lambda \ge \sigma \). Direct computation gives
If \(\mathcal {F_{\mathbf {u}}}(d_1,d_2,\lambda ; e^*)\) is invertible, i.e. 0 is not an eigenvalue \(\mathcal {F_{\mathbf {u}}}(d_1,d_2,\lambda ; e^*)\), then the Leray–Schauder Theorem (Theorem 2.8.1 in [46]) implies that
where \(\gamma =\sum M_{\beta }\) and \(M_{\beta }\) is the multiplicity of any negative eigenvalue \(\beta \) of \(\mathcal {F_{\mathbf {u}}}(d_1,d_2,\lambda ; e^*)\). The \(deg(\mathcal {F}(d_1, d_2, \lambda ; \cdot ), \Lambda , 0)\) is then equal to the summation of the indexes over all solutions to \(\mathcal {F}=0\) in \(\Lambda \).
To calculate \(\gamma \), we firstly define
By the same arguments as in [52, 64], \(\beta \) is an eigenvalue of \(\mathcal {F_{\mathbf {u}}}(d_1,d_2,\lambda ; e^*)\) on \(X_j\) if and only if \(\beta (1+\mu _j)\) is an eigenvalue of the matrix
Thus, \(\mathcal {F_{\mathbf {u}}}(d_1,d_2,\lambda ; e^*)\) is invertible if and only if the matrix \(M(\mu _j)\) is non-singular for all \(j\ge 0\). We also have that if \(\widetilde{H}(d_1,d_2,\lambda ;\mu _j)\not =0\), then \(\widetilde{H}(d_1,d_2,\lambda ;\mu _j)<0\) if and only if the number of negative eigenvalues of \(\mathcal {F_{\mathbf {u}}}(d_1,d_2,\lambda ; e^*)\) in \(X_j\) is odd. Then the following lemma (Theorem 6.1.1 in [64]) gives the explicit formula of calculating the index:
Lemma 4.7
If \(\widetilde{H}(d_1,d_2,\lambda ;\mu _i)\ne 0\) for all \(i\ge 0\), then
where \(m(\mu _i)\) is the algebraic multiplicity of \(\mu _i\).
From Lemma 4.7 we see that to calculate the index of \(\mathcal {F}(d_1,d_2,\lambda ; e^*)\), the key step is to determine the range of \(\mu \) for which \(\widetilde{H}(d_1,d_2,\lambda ;\mu )<0\).
If \(i=0\), then \(\widetilde{H}(d_1,d_2,\lambda ;0)=\dfrac{-B(\lambda )C(\lambda )}{d_1d_2} =\dfrac{\lambda (1-\lambda )g'(\lambda )}{d_1d_2}>0\) for all \(\sigma \le \lambda <1\), which has no contribution to the sum \(\gamma \) in Lemma 4.7. We assume that \(i\ge 1\) in the following.
Indeed nonnegative roots to (4.15) exist if and only if \(-4d_1B(\lambda )C(\lambda )-d_2A^2(\lambda )<0\). Define \(\mu ^+(\lambda ,d_1,d_2)\) and \(\mu ^-(\lambda ,d_1,d_2)\) be the two roots of
Now by using the same method as in [52, 64] , we have the following existence result for the non-constant steady state solutions:
Theorem 4.8
Let \(S=\bigcup _{i=1}^{\infty }\{\mu _i\}\) be the set of all eigenvalues of \(-\Delta \) in \(H^1(\Omega )\), and let \(A(\lambda )\), \(B(\lambda )\) and \(C(\lambda )\) be defined as in Sect. 2. Assume that
and there exists \(i,j\in N_0\), such that
-
(1)
\(0\le \mu _j<\mu ^{-}(\lambda ,d_1,d_2)<\mu _{j+1}\le \mu _i<\mu ^{+}(\lambda ,d_1,d_2)<\mu _{i+1}\);
-
(2)
\(\sum _{k=j+1}^{i}m(\mu _k)\) is odd.
Then (4.1) has at least one non-constant positive solution \(\left( u(x),v(x)\right) \) when \(\sigma \le \lambda <1\).
Proof
Consider a mapping \(\hat{H}:\Lambda \times [0,1]\rightarrow C(\Omega )\times C(\Omega )\) by
where \(d^*\) is defined as in Theorem 4.4. It is easy to see that solving (4.1) is equivalent to find a fixed point of \(\hat{H}(\cdot ,1)\) in \(\Lambda \). According to the choice of \(d^*\) in Theorem 4.4, we have that \(e^*=(\lambda ,v_{\lambda })\) is the only fixed point of \(\hat{H}(\cdot ,0)\).
Furthermore, we have
Since \(I-\hat{H}(\cdot ,1)=\mathcal {F}\), and if (4.1) has no other positive solutions except the constant one \(e^*\), we have
On the other hand, from the homotopy invariance of the Leray–Schauder degree, we have
which is a contradiction. Therefore, there exists at least one non-constant positive solution \(\left( u(x),v(x)\right) \) to (4.1). \(\square \)
The conditions (1) and (2) in Theorem 4.8 defines a region in the parameter space \(\{(\lambda ; d_1; d_2)\}\) for which a non-constant solution to (4.1) exists. This parameter region is usually a union of smaller connected components. When fixing all other parameters but freeing one, the parameter set is usually a union of non-overlapping intervals. This can be seen in the following corollary.
Corollary 4.9
Let \(d (or \lambda ), d_1\) be fixed so that (4.16) holds. Define
for some \(n\in \{n\in \mathbb {N}:d_1\mu _n-A(\lambda )<0\}\). Assume that each of \(\mu _j\) has odd multiplicity for \(j\in M\) and the set \(\{d_2^n:n\in \mathbb {N}, d_1\mu _n-A(\lambda )<0 \}\) can be relabeled to \(\{\widehat{d_2^n}:n\in \mathbb {N}\}\) such that
where \(\dfrac{B(\lambda )C(\lambda )}{d_1\mu -A(\lambda )\mu }\) achieves its minimum \(d_2^*\) for \(d_1\mu -A(\lambda )<0\). Then (4.1) has at least one non-constant solution for \(d_2\in \bigcup _{i\in \mathbb {N}}(\widehat{d_2^{2i}},\widehat{d_2^{2i+1}})\).
Proof
It is easy to see that \(\gamma \) is odd when \(d_2\in \bigcup _{i\in \mathbb {N}}(\widehat{d_2^{2i}},\widehat{d_2^{2i+1}})\). \(\square \)
4.3 Steady State Bifurcation and Stationary Patterns
In this section we will identify bifurcation points \(\lambda ^S\) along the branch of the constant steady states \(\{(\lambda ,\lambda ,v_{\lambda }):\lambda _1<\lambda <\lambda _2\}\) where non-constant steady state solutions bifurcate from. In this subsection, we assume that all eigenvalues \(\mu _i\) of \(-\Delta \) in \(H^1(\Omega )\) are simple, and denote corresponding eigenfunction by \(\phi _i(x)\). Note that this assumption always holds when \(n=1\) for domain \(\Omega =(0,\ell \pi )\) that for \(i\in {\mathbb N}_0\). From [67], we know that a bifurcation point \(\lambda ^S\) satisfies the following condition:
- \(\mathbf{(H2)}\)::
-
there exists \(i\in {\mathbb N}_0\) such that
$$\begin{aligned} D_i(\lambda ^S)=0,\;\;T_i(\lambda ^S)\ne 0,\;\text { and }\; D_j(\lambda ^S)\ne 0,\; T_j(\lambda ^S)\ne 0\;\text { for }\;j\ne i; \end{aligned}$$and
$$\begin{aligned} \displaystyle \frac{d}{d\lambda }D_i(\lambda ^S)\ne 0. \end{aligned}$$
It is well known that the first eigenvalue of \(-\Delta \) under the Neumann boundary is \(\mu _0=0\). Then \(D_0(\lambda )=\lambda (1-\lambda )g'(\lambda )\ne 0\) for any \(0<\lambda <1\). Moreover, \(D_n(\lambda )>0\) for \(\lambda \in (0, \lambda _{1}]\) or \(\lambda \in [\lambda _{2}, 1)\), hence we only consider \(n\in {\mathbb N}\) and determine the set
when a set of parameters \((d,d_1,d_2)\) are given.
Now for the steady state bifurcation curve \(D_n(\lambda )=0\), we notice that it is equivalent to \(\tilde{D}(\lambda )= (a^2+\lambda ^2)D_n(\lambda )=0\) for \(\lambda \ge 0\). For fixed \(\mu _n\), \(\tilde{D}\) is a degree 3 polynomial of \(\lambda \), and for fixed \(\lambda \), it is a quadratic in p. Suppose \(S(\lambda )=d_2^2A^2(\lambda )+4d_1d_2B(\lambda )C(\lambda )>0\), which is equivalent to
From Lemma 4.10, there exists at least two roots of \(S(\lambda )=0\), the minimal and maximal one are denoted by \(\lambda _1<\lambda _{-}<\lambda _{+}<\lambda _2\). Thus we can solve \(\mu _n\) from \(D_n(\lambda )=0\). Let
where \(\alpha (\lambda )=\dfrac{A(\lambda )^2}{C(\lambda )}=\dfrac{(-2\lambda ^3+\lambda ^2-a^2)^2}{2a^2(1-\lambda )(a^2+\lambda ^2)}\). It is mentioned that \(\mu _{\pm }(\lambda )\) exists only for
One can also see that the function \(D_n(\lambda )\) has no critical points in the first quadrant, hence the set \(\{(\lambda ,\mu _n)\in {\mathbb {R}}^2_+: D_n(\lambda )=0\}\) must a bounded connected smooth curve. We have the following basic property of the function \(\alpha (\lambda )\).
Lemma 4.10
For all \(\lambda \in (\lambda _1,\lambda _2)\), \(\alpha (\lambda )>0\); \(\alpha (\lambda _1)=\alpha (\lambda _2)=0\). \(\alpha '(\lambda _1+0)>0\), \(\alpha '(\lambda _2-0)<0\) and there exists a unique \(\lambda ^{\dag }\in (\lambda _1, \lambda _2)\) such that \(\alpha '(\lambda ^{\dag })=0\) and \(\alpha (\lambda ^{\dag })=\max _{\lambda _1<\lambda <\lambda _2}\alpha (\lambda )\).
Proof
From the expression of \(\alpha (\lambda )\) and \(A(\lambda _1)=A(\lambda _2)=0\), it is clearly that \(\alpha (\lambda _1)=\alpha (\lambda _2)=0\). By direct calculation, it follows that
Denote \(\widetilde{\alpha }(\lambda )=2A'(\lambda )C(\lambda )-A(\lambda )C'(\lambda )\). Since \(\widetilde{\alpha }(\lambda _1)=2A'(\lambda _1)C(\lambda _1)>0\) and \(\widetilde{\alpha }(\lambda _2)=2A'(\lambda _2)C(\lambda _2)<0\), there exists at least one root of \(\widetilde{\alpha }(\lambda )=0\) in \((\lambda _1,\lambda _2)\). Moreover, it can denote such \(\lambda \) as \(\lambda ^{\dag }\) such that \(\alpha (\lambda ^{\dag })=\max _{\lambda _1<\lambda <\lambda _2}\alpha (\lambda )\). \(\square \)
We can summarize the properties of \(\mu _{\pm }(\lambda )\) as follows:
Lemma 4.11
Suppose that \(a>0, m>0\) and the constants \(d_1, d_2\) satisfy (4.18). Let \(\mu _{\pm }(\lambda )\) be the functions defined in (4.19). Then there exists \(\lambda _1<\lambda _{-}<\lambda _{+}<\lambda _2\) such that \(\mu _{\pm }(\lambda )\) exists for \(\lambda \in \Lambda _S\). Moreover \(\mu _{+}(\lambda )\ge \mu _{-}(\lambda )\) and
Hence the steady state bifurcation curve \(\{D_n(\lambda ,\mu )=0:\mu \ge 0, \lambda \ge 0\}\) is a smooth curve connecting \((\lambda ,\mu )=\left( \lambda _{-},\frac{A(\lambda _{-})}{2d_1}\right) \), \((\lambda ,\mu )=\left( \lambda _{+},\frac{A(\lambda _{+})}{2d_1}\right) \). Moreover, \(\mu _{+}(\lambda )\) attains its maximum value \(M^{**}\) at \(\lambda ^{**}\in [\lambda _{-},\lambda _{+}]\) and \(\mu _{-}(\lambda )\) attains its minimum value \(M_{**}\) at \(\lambda _{**}\in [\lambda _{-},\lambda _{+}]\), thus the steady state bifurcation curve exists only for \(\mu \in [M_{**}, M^{**}]\).
From Lemma 4.11, if \(M_{**}>\mu _i=\mu >M^{**}\), then there no \(\lambda \in (\lambda _{-},\lambda _{+}]\) such that \(D_i(\lambda )=0\). But for any \(M_{**}\le \mu _i\le M^{**}\), there exists \(\lambda ^S_i\) such that \(D_i(\lambda ^S_i)=0\) and these \(\lambda _i^S\) are potential steady state bifurcation points. Note that from Lemma 4.11 in Sect. 4.1, for each given \(i\in {\mathbb N}\), there are at least two \(\lambda \) such that \(D(\lambda ,\mu _i)=0\).
On the other hand, it is possible that for some \(\lambda \in (\lambda _{-},\lambda _{+})\) and some \(i\ne j\), we have
Then for this \(\lambda \), 0 is not a simple eigenvalue of \(L(\lambda )\) and we shall not consider bifurcations at such points. However from an argument in [67], for \(n=1\) and \(\Omega =(0,\ell \pi )\), there are only countably many \(\ell \), such that (4.20) occurs for some \(i\ne j\). For general bounded domains in \({\mathbb {R}}^n\), one can also show that (4.20) does not occur for generic domains.
Next we verify \(\displaystyle \frac{d D_i}{d\lambda }(\lambda _i^S)\ne 0\) if \(\lambda _i^S\in \Lambda _{S}\) and \(S(\lambda _i^S)\ne 0\). Indeed one has \(D_i'(\lambda )=-B(\lambda )C'(\lambda )-d_2 \mu _i A'(\lambda )\), and from the expression of \(\mu _{\pm }\),
Therefore from Lemma 4.11, if \(\mu '_{\pm }(\lambda _i^S)\ne 0\), then \(\displaystyle \frac{d D_i}{d\lambda }(\lambda _i^S)\ne 0\) for \(\lambda _i^S\in \Lambda _{S}\) and \(S(\lambda _i^S)\ne 0\).
Summarizing the above discussion and using a general bifurcation theorem ([55]), we obtain the main result of this section on the global bifurcation of steady state solutions:
Theorem 4.12
Suppose that \(d,d_1,d_2>0\) are fixed. Let \(\Omega \) be a bounded smooth domain so that its spectral set \(S=\{ \mu _i\}\) satisfy that
- [S1] :
-
All eigenvalues \(\mu _i\) are simple for \(i\ge 0\);
- [S2] :
-
There exists \(l,k\in {\mathbb N}\) such that \(0=\mu _0<\cdots <\mu _{l-1}<M_{**}<\mu _l<\cdots <\mu _k<M^{**}<\mu _{k+1}\), where \(M_{**}\), \(M^{**}\) are constants depending on \(d,d_1,d_2\) which is defined in Lemma 4.11,
then for each \(l\le i\le k\), there exist at least two \(\lambda _{i,-}^S<\lambda _{i,+}^S\in (\lambda _{-},\lambda _{+})\) such that \(D(\lambda _{i,\pm }^S,\mu _i)=0\). If in addition, we assume
then
-
1.
There is a smooth curve \(\Gamma _i\) of positive solutions of (4.1) bifurcating from \((\lambda ,u,v)=(\lambda ^S_i,\lambda ^S_i,v_{\lambda ^S_i})\), with \(\Gamma _i\) contained in a global branch \(\mathcal {C}_i\) of positive solutions of (4.1);
-
2.
Near \((\lambda ,u,v)=(\lambda ^S_i,\lambda ^S_i,v_{\lambda ^S_i})\), \(\Gamma _i=\{(\lambda _i(s),u_i(s),v_i(s)): s\in (-\epsilon ,\epsilon )\}\), where \(u_i(s)=\lambda ^S_i+s a_i \phi _i(x)+s\psi _{1,i}(s)\), \(v_i(s)=\lambda ^S_i+s b_i \phi _i(x)+s\psi _{2,i}(s)\) for some \(C^{\infty }\) smooth functions \(\lambda _i, \psi _{1,i}, \psi _{2,i}\) such that \(\lambda _i(0)=\lambda ^S_i\) and \(\psi _{1,i}(0)=\psi _{2,i}(0)=0\); Here \((a_i,b_i)\) satisfies
$$\begin{aligned} L(\lambda ^S_i)[(a_i,b_i)^{\top } \phi _i(x)]=(0,0)^{\top }. \end{aligned}$$ -
3.
Either \(\overline{\mathcal {C}_i}\) contains another \((\lambda ^S_j,\lambda ^S_j,v_{\lambda ^S_j})\) for \(j\ne i\) and \(1\le j\le k\), or the projection of \(\overline{\mathcal {C}_i}\) onto \(\lambda -\)axis contains the interval \((0,\lambda ^S_{i})\).
Proof
The existence and uniqueness of \(\lambda _i^S\) follows from discussions above. Then the local bifurcation result follows from Theorem 3.2 in [67], and it is an application of a more general result Theorem 4.3 in [55].
For the global bifurcation, we apply Theorem 4.3 in [55]. After the change of variables:
we define a nonlinear equation:
with domain
Then \(\{(\lambda ,0,0): 0<\lambda <1\}\) is a line of trivial solutions for \(F=0\) and Theorem 4.3 in [55] can be applied to each continuum \(\mathcal {C}_i\) bifurcated from \((\lambda _i^S,0,0)\). For each continuum \(\mathcal {C}_i\), either \(\overline{\mathcal {C}_i}\) contains another \((\lambda _j^S,0,0)\) or \(\mathcal {C}_i\) is not compact. (Here we do not make an extinction between the solutions of (4.1) and \(F=0\) as they are essentially same, hence we use \(\mathcal {C}_i\) for solution continuum for both equations.)
From Lemma 4.2, every solution (u, v) of (4.1) is bounded in \(L^{\infty }\), then it is also bounded in X from \(L^p\) estimates and Schauder estimates. Therefore, if \(\mathcal {C}_i\) is not compact, then \(\overline{\mathcal {C}_i}\) contains a boundary point \((\widetilde{\lambda }, \widetilde{w_1}, \widetilde{w_2})\).
-
(a)
If \(\widetilde{\lambda }=0\), then the projection of \(\overline{\mathcal {C}_i}\) onto \(\lambda -\)axis contains \((0,\lambda _i^S)\);
-
(b)
If \(\widetilde{\lambda }=1\), then Corollary 4.3 implies that \((\widetilde{\lambda }+\widetilde{w_1}, v_{\widetilde{\lambda }}+\widetilde{w_2})=(0,0)\) or (1, 0). But \((u,v)=(0,0)\) is not a bifurcation point since the linearization of (1.3) implies that the constant equilibrium (0, 0) is unstable. Hence \((\widetilde{w_1}+\widetilde{\lambda },\widetilde{w_2}+v_{\widetilde{\lambda }})\) must be in a form of (1, 0);
-
(c)
If \(0<\widetilde{\lambda }<1\), then there exists \(x_0\in \bar{\Omega }\) such that \((\widetilde{w_1}+\widetilde{\lambda })(x_0)=0\) or \((\widetilde{w_2}+v_{\widetilde{\lambda }})(x_0)=0\) since \(\widetilde{w_1}\) and \(\widetilde{w_2}\) are bounded from Theorem 4.6. The strong maximum principle implies that \((\widetilde{w_1}+\widetilde{\lambda })(x)\equiv 0\) or \((\widetilde{w_2}+v_{\widetilde{\lambda }})(x)\equiv 0\) for all \(x\in \Omega \). If \(v\equiv 0\), then \((\widetilde{\lambda }, u, v)\) is a solution in form \((\widetilde{\lambda }, 0, 0)\) or \((\widetilde{\lambda }, 1, 0)\). If \(u\equiv 0\), then \(v\equiv 0\) from maximum principle. Same as in (b), \((\widetilde{w_1}+\widetilde{\lambda },\widetilde{w_2}+v_{\widetilde{\lambda }})\) also must be in a form of (1, 0).
\(\square \)
Remark 4.13
We remark that one can indeed show that \(\lambda =\lambda _n^S\) and \(d_2=d_2^n\) defined in Corollary 4.9 are bifurcation points where non constant positive solutions stem out from the branch of constant solutions by using of the global bifurcation theorem in [55]. This would partially generalize the result in Theorem 4.12 where the eigenvalues \(\mu _i\) are assumed to be simple. However the result in Corollary 4.9 shows the existence of non constant solutions in some more specific parameter regions, which cannot be achieved in bifurcation results.
References
Alikakos, N.D.: An application of the invariance principle to reaction-diffusion equations. J. Diff. Equ. 33, 201–225 (1979)
Arditi, R., Ginzburg, L.R.: Coupling in predator-prey dynamics: ratio-dependence. J. Theor. Biol. 139, 311–326 (1989)
Auchmuty, J.F.G., Nicolis, G.: Bifurcation analysis of nonlinear reaction-diffusion equations. I. Evolution equations and the steady state solutions. Bull. Math. Biology 37(4), 323–365 (1975)
Beddington, J.R.: Mutual interference between parasites or predators and its effect on searching efficiency. J. Anim. Ecol. 44, 331–340 (1975)
Brown, K.J., Davidson, F.A.: Global bifurcation in the Brusselator system. Nonlinear Anal. 24(12), 1713–1725 (1995)
Cantrell, R.S., Cosner, C.: Spatial Ecology via Reaction-Diffusion Equations. Wiley Series in Mathematical and Computational Biology. Wiley, New York (2003)
Cantrell, R.S., Cosner, C., Hutson, V.: Permanence in ecological systems with spatial heterogeneity. Proc. R. Soc. Edinb. 123A, 533–559 (1993)
Catllá, A.J., McNamara, A., Topaz, C.M.: Instabilities and patterns in coupled reaction-diffusion layers. Phys. Rev. E 85(2), 026215-1 (2012)
Chaudhuri, K.: Dynamic optimization of combined harvesting of a two species fishery. Ecol. Model. 41, 17–25 (1988)
Chen, J.P., Zhang, H.D.: The qualitative analysis of two species predator-prey model with Holling Type III functional response. Appl. Math. Mech. 7(1), 77–86 (1986)
Conway, E., Hoff, D., Smoller, J.: Large time behavior of solutions of systems of nonlinear reaction-diffusion equations. SIAM J. Appl. Math. 35(1), 1–16 (1978)
Crowley, P.H., Martin, E.K.: Functional responses and interference within and between year classes of a dragonfly population. J. North Am. Bent. Soc. 8, 211–221 (1989)
Das, U., Kar, T.K.: Bifurcation analysis of a delayed predator-prey model with holling type III functional response and predator harvesting. J. Nonlinear Dyn. 2014 (2014), Article ID 543041
De Mottoni, P., Rothe, F.: Convergence to homogeneous equilibrium state for generalized Volterra-Lotka systems with diffusion. SIAM J. Appl. Math. 37, 648–663 (1979)
DeAngelis, D.L., Goldstein, R.A., Neill, R.V.: A model for trophic interaction. Ecology 56, 881–892 (1975)
Du, Y., Lou, Y.: Some uniqueness and exact multiplicity results for a predator-prey mmodel. Trans. Am. Math. Soc. 349, 2443–2475 (1997)
Du, Y., Lou, Y.: S-shaped global bifurcation curve and Hopf bifurcation of positive solutions to a predator-prey model. J. Differ. Equ. 144, 390–440 (1998)
Du, Y.H., Shi, J.P.: Some recent results on diffusive predator-prey models in spatially heterogeneous environment. Nonlinear Dyn. Evol. Equ. 48, 95–135 (2006)
Du, Y.H., Shi, J.P.: A diffusive predator-prey model with a protection zone. J. Diff. Equ. 229(1), 63–91 (2006)
Du, Y.H., Shi, J.P.: Allee effect and bistability in a spatially heterogeneous predator-prey model. Trans. Am. Math. Soc. 359(9), 4557–4593 (2007)
Du, Y., Peng, R., Wang, M.: Effect of a protection zone in the diffusive Leslie predator-prey model. J. Differ. Equ. 246, 3932–3956 (2009)
Dubey, B., Das, B., Hussain, J.: A predator-prey interaction model with self and cross-diffusion. Ecol. Model. 141, 67–76 (2001)
Eduardo, G.O., Alejandro, R.P.: Multiple limit cycles in a Gause Type predator-prey model with Holling Type III functional response and Allee effect on prey. Bull. Math. Biol. 73(6), 1378–1397 (2011)
Freedman, H.I.: Deterministic Mathematical Models in Population Ecology. Marcel Dekker, New York (1980). MR 83h:92043
Ghergu, M.: Non-constant steady-state solutions for Brusselator type systems. Nonlinearity 21(10), 2331–2345 (2008)
Ghergu, M., Radulescu, V.D.: Nonlinear PDEs: Mathematical Models in Biology, Chemistry and Population Genetics. Springer, New York (2011)
Hale, J.K.: Asymptotic Behavior of Dissipative Systems. Mathematical Surveys and Monographs. American Mathematical Society, Providence (1988)
Hassard, B.D., Kazarinoff, N.D., Wan, Y.-H.: Theory and Applications of Hopf Bifurcation. Cambridge University Press, Cambridge (1981)
Henry, D.: Geometric Theory of Semilinear Parabolic Equations. Lecture Notes in Mathematics. Springer, Berlin-New York (1981)
Holling, C.S.: The components of predation as revealed by a study of small mammal predation of the European Pine Sawfly. Can. Entomol. 91, 293–320 (1959)
Holling, C.S.: The functional response of predators to prey density and its role in mimicry and population regulation. Mem. Ent. Soc. Can. 45, 1–60 (1965)
Hollis, S.L., Martin, R.H., Pierre, M.: Global existence and boundedness in reaction-diffusion systems. SIAM J. Math. Anal. 18(3), 744–761 (1987)
Hsu, S.B., Huang, T.W.: Global stability for a class of predator-prey systems. SIAM J. Appl. Math. 55, 763–783 (1995)
Hsu, S.B., Hwang, T.W., Kuang, Y.: Rich dynamics of a ratiodependent one-prey two-predators model. J. Math. Biol. 43, 377–396 (2001)
Kareiva, P.M., Kingsolver, J.G., Huey, R.B.: Biotic Interactions and Global Change. Sinauer, Sunderland (1993)
Kazarinov, N., van den Driessche, P.: A model predator-prey systems with functional response. Math. Biosci. 39, 125–134 (1978)
Kolokolnikov, T., Erneux, T., Wei, J.: Mesa-type patterns in the one-dimensional Brusselator and their stability. Physica D 214(1), 63–77 (2006)
Kuang, Y., Freedman, H.I.: Uniqueness of limit cycles in Gause-type models of predator-prey system. Math. Biosci. 88, 67–84 (1988)
Kuto, K.: Stability of steady-state solutions to a prey-predator system with cross-diffusion. J. Diff. Equ. 197, 293–314 (2004)
Kuto, K., Yamada, Y.: Multiple coexistence states for a prey-predator system with cross-diffusion. J. Diff. Equ. 197, 315–348 (2004)
Lewis, M.A., Karevia, P.: Allee dynamics and the spread of incading organisms. Theor. Popul. Biol. 43, 141–158 (1993)
Li, W.T., Wu, Sl: Traveling waves in a diffusive predator-prey model with Holling type-III functional response. Chaos Solitons Fractals 37(2), 476–486 (2008)
Lotka, A.J.: Elements of Physical Biology. Williams and Wilkins, Baltimore (1925)
Morozov, A., Petrovskii, S., Li, B.-L.: Spatiotemporal complexity of patchy incasion in a predator prey system with the Allee effect. J. Theor. Biol. 238, 18–35 (2006)
Ni, W.M., Tang, M.X.: Turing patterns in the Lengyel-Epstein system for the CIMA reaction. Trans. Am. Math. Soc. 357(10), 3953–3969 (2005)
Nirenberg, L.: Topics in Nonlinear Functional Analysis. Courant Institute of Mathematical Science, New York (1973)
Oeda, K.: Effect of cross-diffusion on the stationary problem of a prey-predator model with a protection zone. J. Differ. Equ. 250, 3988–4009 (2011)
Owen, M.R., Lewis, M.A.: How predation can slow, stop or reverse a prey invasion. Bull. Math. Biol. 63, 655–684 (2001)
Pao, C.V.: Strongly coupled elliptic systems and applications to Lotka-Volterra models with cross-diffusion. Nonlinear Anal. 60, 1197–1217 (2005)
Peng, R., Wang, M.X.: Pattern formation in the Brusselator system. J. Math. Anal. Appl. 309(1), 151–166 (2005)
Peng, R., Wang, M.X.: Some nonexistence results for nonconstant stationary solutions to the Gray-Scott model in a bounded domain. Appl. Math. Lett. 22(4), 569–573 (2009)
Peng, R., Shi, J.P., Wang, M.X.: On stationary patterns of a reaction diffusion model with autocalysis and saturation law. Nonlinearity 21, 1471–1488 (2008)
Real, L.A.: Ecological determinants of functional response. Ecology 60, 481–485 (1979)
Ryu, K., Ahn, I.: Positive steady-states for two interacting species models with linear self-cross diffusions. Discret. Contin. Dyn. Syst. 9, 1049–1061 (2003)
Shi, J.P., Wang, X.F.: On the global bifurcation for quasilinear elliptic systems on bounded domains. J. Differ. Equ. 246(7), 2788–2812 (2009)
Song, Z.Q., Wan, A.Y.: Patterned solutions of a homogenous diffusive predator prey system of Holling type-III. Acta Math. Appl. Sin. Engl. Ser. 29, 423–447 (2012)
Soul\(\acute{e}\), M.E. (ed.): Conservation Biology: The Science of Scarcity and Diversity. Sinauer, Sunderland (1986)
Su, H., Dai, B.X., Chen, Y.M., Li, K.W.: Dynamic complexities of a predator-prey model with generalized Holling type III functional response and impulsive effects. Comput. Math. Appl. 56(7), 1715 (2008)
Sugie, J., Kohno, R.: On a predator-prey system of Holling type. Proc. Am. Math. Soc. 7(25), 2041–2050 (1997)
Turing, A.M.: The chemical basis of morphogenesis. Philos. Trans. R. Soc. Lond. Ser. B 237(641), 37–72 (1952)
Volterra, V.: Fluctuations in the abundance of species, considered mathmatically. Nature 118, 558 (1926)
Wang, J.F., Shi, J.P., Wei, J.J.: Dynamics and pattern formation in a diffusive predator-prey System with strong Allee effect in Prey. J. Differ. Equ. 251, 1276–1304 (2011)
Wang, J.F., Wei, J.J., Shi, J.P.: Global bifurcation analysis and pattern formation in homogeneous diffusive predator-prey systems. J. Differ. Equ. 260, 3495–3523 (2016)
Wang, M.X.: Nonlinear Elliptic Equation (in Chinese). Science Press, Beijing (2010)
Xu, C., Wei, J.J.: Hopf bifurcation analysis in a one-dimensional Schnakenberg reaction-diffusion model. Nonlinear Anal. Real World Appl. 13(4), 1961–1977 (2012)
Yi, F.Q., Wei, J.J., Shi, J.P.: Diffusion-driven instability and bifurcation in the Lengyel-Epstein system. Nonlinear Anal. Real World Appl. 9(3), 1038–1051 (2008)
Yi, F.Q., Wei, J.J., Shi, J.P.: Bifurcation and spatiotemporal patterns in a homogeneous diffusive predator-prey system. J. Differ. Equ. 246, 1944–1977 (2009)
Yi, F., Wei, J., Shi, J.: Global asymptotical behavior of the Lengyel-Epstein reaction-diffusion system. Appl. Math. Lett. 22, 52–55 (2009)
You, Y.C.: Global dynamics of the Brusselator equations. Dyn. Partial Differ. Equ. 4(2), 167–196 (2007)
Zhou, J., Kim, C.G., Shi, J.P.: Leslie-Gower predator prey model with Holling Type II functional response and cross-diffusion. Discret. Contin. Dyn. Syst. 34(9), 3875–3899 (2014)
Acknowledgments
We sincerely thank the very detailed and helpful referee report by the anonymous reviewer. This research is partially supported by the National Natural Science Foundation of China (Nos. 11201101, 11471091), Heilongjiang Province Natural Science Foundation (QC2015002).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Wang, J. Spatiotemporal Patterns of a Homogeneous Diffusive Predator–Prey System with Holling Type III Functional Response. J Dyn Diff Equat 29, 1383–1409 (2017). https://doi.org/10.1007/s10884-016-9517-7
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10884-016-9517-7