
Abstract
We characterize the Lie groups with finitely many connected components that are O(u)-bilipschitz equivalent (almost quasiisometric in the sense that the sublinear function u replaces the additive bounds of quasiisometry) to the real hyperbolic space, or to the complex hyperbolic plane. The characterizations are expressed in terms of deformations of Lie algebras and in terms of pinching of sectional curvature of left-invariant Riemannian metrics in the real case. We also compare sublinear bilipschitz equivalence and coarse equivalence, and prove that every coarse equivalence between the logarithmic coarse structures of geodesic spaces is a \(O(\log )\)-bilipschitz equivalence. The Lie groups characterized are exactly those whose logarithmic coarse structure is equivalent to that of a real hyperbolic space or the complex hyperbolic plane. Finally we point out that a conjecture made by Tyson about the conformal dimensions of the boundaries of certain hyperbolic buildings holds conditionally to the four exponentials conjecture.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
1.1 Background
Let X and Y be metric spaces. A map \(\phi : X \rightarrow Y\) is a quasiisometry if there exists \(\lambda \ge 1\) and \(c \ge 0\) such that \(\lambda ^{-1} d(x,x') - c \le d(\phi (x), \phi (x')) \le \lambda d(x,x') + c\) and for every y in Y, \(d(y, \phi (X)) \le c\). Let a locally compact, compactly generated group G act continuously co-compactly properly by isometries on a locally compact geodesic space X; we call X a geometric model of G. Every such G has a geometric model (e.g. Cayley graphs if it is finitely generated, Riemannian metrics if it is connected Lie), and two geometric models of a given G will always be equivariantly quasiisometric. Thus one can speak of quasiisometries between compactly generated locally compact groups.
Quasiisometries arose from the interpretation by Margulis of the work of Mostow on the rigidity of locally symmetric spaces [56]. Specifically, Margulis conjectured that a quasiisometry of a higher rank symmetric space X should lie at bounded distance from an isometry, implying Mostow rigidity for the co-compact lattices in X, but also the fact that any finitely generated group G quasiisometric to X must surject with finite kernel onto such a uniform lattice. This was first proved by Kleiner and Leeb using asymptotic cones, a tool formerly introduced by Gromov, in the form recast by van den Dries and Wilkie [48]. The interplay of quasiisometries and asymptotic cones can actually be expressed in the following way: between geodesic metric spaces, a map is a quasiisometry if and only if it goes through any asymptotic cone (with possibly moving observation centers); see Sect. 2.3 for a precise statement. Kleiner and Leeb’s theorem is part of a more general principle which, in contrast with Mostow rigidity, makes sense (and is stated below) for locally compact compactly generated groups.
Theorem 1
(Many authors, see [75, Theorem 19.25] and the references there) Let G be a compactly generated locally compact group and let X be a Riemannian symmetric space of non-compact type. The following are equivalent:
-
(1)
G is quasiisometric to X.
-
(2)
X is a Riemannian geometric model for G.
Moreover, if G is a Lie group isomorphic to a closed subgroup of upper triangular real matrices (call such groups completely solvable), then the former are equivalent to:
-
(3)
G is isomorphic to a maximal completely solvableFootnote 1 subgroup of \({\text {Isom}}(X)\).
The case G finitely generated and \(X = {\mathbb {H}}_{{\mathbf {R}}}^n\), \(n \ge 3\) is up to formulation due to Tukia [70] and was among the early results motivating the first formulation of quasiisometric rigidity by Gromov [59]. Gromov almost simultaneously proposed a vast programme of classifying finitely generated groups and isometrically homogeneous spaces up to quasiisometry [58]. For nonsemisimple connected or nonarchimedean Lie groups and their lattices, this is far from being achieved today.
Between geodesic metric spaces, quasiisometries are exactly the coarse equivalences, that is, they respect the bounded coarse structure described as the family of entourages
A broad interpretation of Gromov’s programme is the following: classify the coarse structures generated by compactly generated groups, and characterize those that are generated by particular geometric models, especially the Riemannian symmetric or homogeneous spaces. Recently, certain extensions of Gromov’s questions have been addressed where coarse surjectivity is relaxed. These are the study of the rigidity of quasiisometric embeddings (see [69] and [28] for symmetric spaces) and of the (non)-existence of coarse embeddings (see [44] for connected Lie groups).
1.2 Main results
In this paper, we are interested in maps more general than quasiisometries. In contrast with quasiisometries, these can still be characterized as going through asymptotic cones, though not through asymptotic cones for any sequence of basepoints (we elaborate on [16] for this; see Sect. 2.3 for a precise statement). The coarse surjectivity assumption is not exactly relaxed, but adapted accordingly.
For the needs of the next definition, say that a function \(u: [0,+\infty ) \rightarrow (0,+\infty )\) is admissible if \(\limsup _{r \rightarrow + \infty } u(r)/r = 0\) (that is, u is sublinear) and for every \(A \ge 1\) there exists \(B<+\infty \) such that for all sequences \((r_n, s_n)\) with \(1/A \le \inf s_n/r_n \le \sup s_n/r_n \le A\), \( \sup u(s_n)/u(r_n) \le B \). Examples of admissible function include \(u(r) = r^\alpha \log ^\beta (r) \) for \(r \ge 2\) (and \(u(r)=1\) otherwise) when \(\alpha \in (-\infty , 1)\) and \(\beta \in (-\infty , +\infty )\).
Definition 1
(AfterFootnote 2 [19]) Let u be an admissible function. A map \(\phi : (X,o_X) \rightarrow (Y,o_Y)\) between pointed metric spaces realizes a (large-scale) O(u)-bilipschitz equivalence if there are \(\kappa \ge 1\) and \(c \ge 0\) such that, for all \(x,x' \in X\) and \(y \in Y\),
where \(\vert x \vert \) denotes \(d_X(o_X,x)\), and “\(\vee \)” denotes max.
We also call o(r)-bilipschitz equivalence, or sublinear bilipschitz equivalence (abbreviated SBE in some places), a \(\phi \) such that (1) and (2) hold with some unspecified strictly sublinear function in lieu of cu.
Quasiisometries correspond to \(u\equiv 1\). Of particular importance in this paper is \(u = \log \). Given an admissible function u, we consider the coarse structure on metric spaces with the following entourages:

These are quantitative refinements of the coarse structure introduced in [24]. O(u)-bilipschitz equivalences are always \({\mathcal {E}}^{O(u)}\)-coarse equivalences. We prove that the converse holds between geodesic spaces when \(u= \log \):
Theorem A
Assume that X and Y are geodesic. Then \(\phi : X \rightarrow Y\) is \(O(\log )\)-bilipschitz if and only if it is a coarse equivalence of \({\mathcal {E}}^{O(\log )}\).
This is a variant of the well-known fact that coarse equivalences between geodesic spaces are quasiisometries, however the proof is significantly more involved.
Keeping quasiisometric rigidity and classification in mind, it is natural to ask:
Question 2
(Rigidity) Let u be as above, \(u \ge 1\). Which compactly generated locally compact groups G are O(u)-bilipschitz equivalent to a given symmetric space X?
Question 3
(Classification) Given u as above, \(u \ge 1\), classify isometrically homogeneous spaces up to O(u)-bilipschitz equivalence.
The following theorem was stated in the introduction of the author’s thesis. While essentially following from the combination of [24, 38] and the coarse interpretation of o(r)-bilipschitz equivalences, it was not extracted at first sight from the literature, so we provide a proof here (relying on the above cited works). Recall for the statement that all the maximal compact subgroups of a connected Lie groups are conjuguated [2].
Theorem B
(After [24] and [38]) Let G and H be connected Lie groups. If there exists a o(r)-bilipschitz equivalence \(\phi : G \rightarrow H\), then
where \({\text {geomdim}}(G)\) denotes \(\dim G/K\) if K is any maximal compact subgroup of G. Especially, if G and H are solvable and simply connected, then \(\dim G = \dim H\).
The theorem actually holds for every o(r)-coarse equivalences \(\phi \), see Sect. 2.5. If G and H are nilpotent, then \({\text {geodim}}\) is the covering dimension of their asymptotic cones and Theorem B also follows from [63].
Next, building on [16, 20] and [62] (which was already concerned with Question 3) we formulate below a partial answer to Question 2 for connected Lie groups G and real hyperbolic space X. While this is not made apparent in the statement, all the groups obtained are either of Heintze or rank-one type, in the typology of [20] and [9].
Theorem C
Let G be a Lie group with finitely many connected components and \(n \ge 2\) an integer. The following are equivalent:
-
(C.1)
G is O(u)-bilipschitz equivalent to \({\mathbb {H}}^n_{{\mathbf {R}}}\), for some sublinear admissible u.
-
(C.2)
G is \(O(\log )\)-bilipschitz equivalent to \({\mathbb {H}}^n_{{\mathbf {R}}}\).
-
(C.3)
For every \(\varepsilon >0\), G has an n-dimensional Riemannian model with \(-1 \le K \le -1+ \varepsilon \).
Moreover, if G is completely solvable with Lie algebra \({\mathfrak {g}}\), the former conditions are equivalent to:
-
(C.4)
\({\mathfrak {g}}\) degenerates to the (isomorphism class of a) maximal completely solvable subalgebra \({\mathfrak {g}}_\infty \) of \({\mathfrak {o}}(n,1)\).
-
(C.5)
The Lie algebra \({\mathfrak {g}}\) decomposes as \(\mathfrak [{\mathfrak {g}}, {\mathfrak {g}}] \oplus {\mathbf {R}} A\), where \([{\mathfrak {g}}, {\mathfrak {g}}]\) is abelian and \({\text {ad}}_A\) is unipotent on \([{\mathfrak {g}}, {\mathfrak {g}}]\).
Here saying that \({\mathfrak {g}}\) degenerates to \({\mathfrak {g}}_\infty \) means that the Zariski closure of the orbit of \({\mathfrak {g}}\) in the variety of Lie algebra laws contains \({\mathfrak {g}}_\infty \), which occurs especially if there is a continuous \(( \varphi _t)_{t \in [0,+\infty )}\) in \(\mathrm {GL}({\mathfrak {g}})\) and a linear isomorphism \(\psi : {\mathfrak {g}} \rightarrow {\mathfrak {g}}_\infty \) such that for every \(X,Y \in {\mathfrak {g}}\),
Theorem C combines known results. That (C.1) implies (C.3) rests on [20] and [62], the equivalence of the last two conditions (C.4) and (C.5) is [51, Theorem 6.2] with minor enhancement, the implication from (C.3) to (C.5) uses [64], while the fact that (C.5) implies (C.2) is a consequence of [16]. When \(n=2\), Theorem C reduces to a weak form of [19, Corollary 1.10(2)]. The statement is simpler when \(n=2\), since 2-dimensional homogeneous metrics have constant curvature. It holds with the mere assumption that G be compactly generated locally compact, and the techniques are specific, relying essentially on [11, 30].
For general connected Lie groups, the process of going from \({\mathfrak {g}}\) to a less complicated \({\mathfrak {g}}_\infty \) so that the simply connected G and \(G_\infty \) remain O(u)-bilipschitz equivalent has an alternative description given in [16] (recalled here in Theorem 11) which does not require degenerations. Our formulation using degeneration is half-successful in this generality. While it also applies well when \({\mathfrak {g}}\) is nilpotent (in this case it is due to Pansu [63]), we do not know whether \({\mathfrak {g}}_\infty \) is a degeneration of \({\mathfrak {g}}\) in general. This will be discussed in Sect. 5.1.
The appearance of the sectional curvature pinching in characterization (C.3) might appeal to some comments. The sphere theorem of Berger and Klingenberg implies that on a positively curved Riemannian manifold, a pinching sufficiently close to 1 determines the homotopy type of the (finite) universal cover. Namely, the latter must be a sphere. As demonstrated by Gromov and Thurston, there is no counterpart for this in negative curvature as one constructs sequences of closed manifolds supporting negatively curved metrics, arbitrarily pinched close to \(-1\), albeit with vanishing first cohomology, hence not homotopy equivalent to any locally symmetric space of constant negative curvature [35].
This is not even repaired if one replaces homotopy equivalence with quasiisometry, as one constructs isometrically homogeneous manifolds with pinching \(> -1/4\) or even arbitrarily close to \(-1\) (characterized in [26], see Sect. 3.1), that are not quasiisometric to \({\mathbb {H}}^n_{{\mathbf {R}}}\) [73]. Theorem C implies the following as far as Lie groups are concerned.
Corollary D
(of Theorem C) If a connected Lie group G has Riemannian models with pinching arbitrarily close to \(-1\), then its sublinear Higson corona \(\nu _L G\) is homeomorphic to that of a real hyperbolic space.
(We recall the definition of the sublinear Higson corona in Sect. 2.5.)
Finally, we also characterize the Lie groups O(u)-bilipschitz equivalent to \({\mathbb {H}}^2_{{\mathbf {C}}}\). Following [17], say that the locally compact G and H are commable if there exists a finite sequence of homomorphisms with compact kernels and co-compact images (both directions allowed) between G and H.
Theorem E
Let G be a Lie group with finitely many connected components. The following are equivalent:
-
(E.1)
G is O(u)-bilipschitz equivalent to \({\mathbb {H}}^2_{{\mathbf {C}}}\)
-
(E.2)
G is \(O(\log )\)-bilipschitz equivalent to \({\mathbb {H}}^2_{{\mathbf {C}}}\)
-
(E.3)
G is commable either to the semisimple \({\text {SU}}(2,1)\) or to the solvable \(S' = H_3 \rtimes {\mathbf {R}}\), where \(H_3\) is the 3-dimensional Heisenberg group and \(t \in {\mathbf {R}}\) acts by
$$\begin{aligned} t.\exp (x,y,z) = \exp (e^t x + te^ty, e^t y, e^{2t} z) \end{aligned}$$in a basis of infinitesimal generators X, Y, Z such that \([X,Y] = Z\).
Moreover, if G is completely solvable, the former conditions are equivalent to:
-
(E.4)
\({\mathfrak {g}}\) degenerates to the maximal completely solvable subalgebra of \({\mathfrak {u}}(2,1)\)
where \({\mathfrak {g}}\) denotes the Lie algebra of G.
The restriction that G be a connected Lie group makes Theorems C and E very special compared to the QI rigidity recalled above, and we benefit from some constraints of the structure theory of Lie groups. Unlike Theorems C and E requires some additional technical work, done in Sect. 4.
1.3 Other spaces
We know little even about Question 3 for higher rank symmetric spaces and other settings, even when quasiisometric rigidity is known to hold. In the end of this paper, we summarize the current situation for symmetric space of higher rank and Fuchsian buildings; especially we explain why their classification is still open at the time of writing.
1.4 Organization of the paper
Section 2 is a general discussion on the theoretical status of SBE (especially, as compared to QI). It is not concerned with Lie groups and can be read independently. Sect. 2.1 provides some preliminaries for Sect. 2. Sections 3 and 4 establish the characterizations of Lie groups O(u)-bilipschitz equivalent to real, resp. complex hyperbolic space, and follow a similar scheme, so we advise to read Sect. 3 first. Most of the technical input in this paper serve the proofs of Theorems A and E and is concentrated in Sects. 2.4 and 4.1 respectively. SBE appears to be quite a new notion and some of the contents of this paper are rather expository in nature, including especially Sect. 2.5 on Theorem B, Sects. 3.1 and 3.2 preparing the proof of Theorem C, and Sect. 5.1 on general connected Lie groups. Sections 5.2 and 5.3 gather a collection of independent remarks. Finally, a certain amount of actual Lie algebra cohomology computations (for trivial and adjoint modules) are required in particular in Lemma 6 and Example 5; we summarize these in Appendix A.
1.5 Convention, notation
When \(G,H, \ldots \) are simply connected Lie groups, then \({\mathfrak {g}}, {\mathfrak {h}}, \ldots \) denote their Lie algebra. We often consider semi-direct products of the form \(N \rtimes {\mathbf {R}}\) or \({\mathfrak {n}} \oplus {\mathbf {R}}\); we then write \(N \rtimes _\alpha {\mathbf {R}}\) or \({\mathfrak {n}} \rtimes _\alpha {\mathbf {R}}\) meaning that the Lie algebra representation \(\rho : {\mathbf {R}} \rightarrow {\text {Der}}({\mathfrak {n}})\) (and not the Lie group representation) is determined by \(1 \mapsto \alpha \). If V is a module and n a nonnegative integer, we denote by \(\varLambda ^n V\) its n-fold exterior product and by \(\varLambda ^n V^*\) the n-fold exterior product of its dual. If \({\mathfrak {g}}\) is a Lie (sub)algebra, \({\text {Vect}}({\mathfrak {g}})\) will denote its underlying vector (sub)space. (This is useful to avoid confusions because we may sometimes consider several Lie brackets on a given space.)
2 Coarse geometry and Theorems A and B
This §motivates sublinear bilipschitz equivalence (defined in Sect. 1) by comparing it to the more standard notions of quasiisometry and coarse equivalence. This comparison will be made through the relations that sublinear bilipschitz equivalence enjoys with asymptotic cones and certain coarse structures. The relation to asymptotic cones is the reason why they were introduced by Cornulier in the first place, in [15] and then more explicitlyFootnote 3 in [16, 19] (See Sect. 2.3.1 for precisely why). In the end of this section, we show that the geometric dimension of connected Lie groups is a SBE invariant.
2.1 Preliminaries
Definition 2
(Coarse equivalence and quasiisometry) Let X and Y be two metric spaces. A map \(\phi :X \rightarrow Y\) is a (uniform) coarse embedding if there exists two proper functions \(\rho _-\) and \(\rho _+: [0,+\infty ) \rightarrow [0,+\infty )\) such that for every \(x,x' \in X\)
The map \(\phi \) is a coarse equivalence if moreover, there exists a coarse embedding \(\psi : Y \rightarrow X\) and a constant \(R \ge 0\) such that for all \(x \in X\), \(d_X(\psi \circ \phi (x),x) \le R\) and for all \(y \in Y\), \(d_Y(\phi \circ \psi (y),y) \le R\); we call g a coarse inverse. \(\phi \) is a \((\kappa , c)\)-quasiisometric embedding if \(\rho _-\) and \(\rho _+\) can be taken affine in (4), namely \(\rho _\pm (r) = \kappa ^{\pm 1} r \pm c\). If in addition \(\phi \) a coarse equivalence, \(\phi \) is called a quasiisometry and any coarse inverse g is also a quasiisometry ; equivalently a quasiisometry is a quasiisometric embedding \(\phi \) such that \(\sup _{y \in Y} d_Y(y, \phi (X)) < + \infty \). We may define a quasiisometry only on a net, that is, a closed subspace \(X^{(0)} \subseteq X\) such that \(\sup _{x \in X} d(x, X^{(0)}) < + \infty \).
Proposition 1
(See e.g. [57, 3.B.9]) If X and Y are two geodesic metric spaces, then any coarse equivalence \(\phi :X \rightarrow Y\) is a quasiisometry.
Proposition 2
Let G be a compactly generated locally compact group. Then
-
(1)
If G acts continuously, properly cocompactly by isometries on the locally compact geodesic spaces X and Y, then there exists a quasiisometry \(\phi : X \rightarrow Y\) such that
$$\begin{aligned} \sup _{(g,x) \in G \times X} d_Y(\phi (g.x), g.\phi (x)) < +\infty . \end{aligned}$$ -
(2)
There exists X locally compact geodesic metric space and an isometric proper co-compact continuous action by isometries of G on X.
(1) is a consequence of [57, Theorem 4.C.5]. For (2), see [9, Proposition 2.1]. In this paper we call X and Y as in the previous Proposition geometric models for G.
2.2 Admissible sublinear functions
Definition 3
Call \(u: [0,+\infty ) \rightarrow (0,+\infty )\) admissible if \(\limsup _{r \rightarrow + \infty } u(r)/r = 0\) and for every \(A \ge 1\) there exists \(B<+\infty \) (only depending on A) such that for all sequences \((r_n, s_n)\) with \(r_n \rightarrow + \infty \) and \(1/A< \inf s_n /r_n \le \sup s_n/r_n < A\), one has
Lemma 1
Let \(u:[0,+\infty ) \rightarrow (0,+\infty )\) be a sublinear function. If u is nondecreasing and \(\limsup u(2r)/u(r) < +\infty \), resp. if u is nonincreasing and \(\liminf u(2r)/u(r)>0\), then u is admissible.
Proof
Let us consider only the case where u is nondecreasing, the proof going the same way. Let \(A > 1\) and \((r_n, s_n)\) be such that \(r_n \rightarrow + \infty \) and \(\lbrace s_n /r_n \rbrace \in [1/A, A]\). Set \(\beta = \limsup u(2r)/u(r)\). Since \(u(s_n)/u(r_n) \le 1\) when \(s_n \le r_n\), one has
This is the inequality on the right in (5) with \(B= \beta ^{\lceil \log _2 A \rceil }\). The left inequality is obtained by reversing \(r_n\) and \(s_n\). \(\square \)
The usefulness of Lemma 1 may not be obvious. Let us give two motivations. The first is that it ensures that the functions u considered in [19, Definition 2.4] are admissible in our sense. The second is that, while Definition 3 allows a unified treatment for sublinear functions u with \(u(r) \rightarrow +\infty \) or \(u(r) \rightarrow 0\) and is sufficient for our purposes in Sects. 2.3 and 2.4, it appears that it is often easier to argue and prove the main statement of this section with monotonic functions u.
The above notion of admissible function resembles the much-studied class of (not necessarily sublinear) regularly varying function in real analysis, but we found no implication between the two without further assumptions.
2.3 Going through cones
Let \((\sigma _n)\) be a sequence of positive real numbers. For \((x_n), (x'_n) \in X^{{\mathbf {N}}}\), denote \((x_n) \sim _{\sigma _n} (x'_n)\) if \(\sup d(x_n, x'_n)/\sigma _n <+\infty \) and \((x_n) \approx _{\sigma _n} (x'_n)\) if
Let \({\text {Precone}}(X,x_n, \sigma _n)\) denote the \(\sim _{\sigma _n}\) equivalence class of \((x_n)\).
Definition 4
(Cone and pointed cone) Let X, \((x_n)\) and \((\sigma _n)\) be as above. Given a nonprincipal ultrafilter \(\omega \) on \({\mathbf {N}}\), define \({\text {Cone}}_\omega (X, x_n, \sigma _n)\) as follows: for any pair of sequences \((x'_n)\) and \((x''_n)\) in \({\text {Precone}}(X,x_n, \sigma _n)\), define \({\widehat{d}}_\omega ((x'_n), (x''_n))= \lim _{n \rightarrow \omega } d(x'_n, x''_n)/\sigma _n\). If \({\widehat{d}}_\omega ((x'_n), (x''_n))\) is zero, identify \((x'_n)\) and \((x''_n)\), and for any sequence \((x'''_n)\) in \({\text {Precone}}(X,x_n, \sigma _n)\), denote by \([x'''_n]\) the equivalence class of \((x'''_n)\). Equip the quotient space \({\text {Cone}}_\omega (X, x_n, \sigma _n)\) with the function \(d_\omega \) by setting \(d_\omega ([x'_n], [x''_n]) = {\widehat{d}}_\omega ((x'_n), (x''_n))\); this is a distance function (see e.g. [53]).
Further, if \(\sigma _n \rightarrow + \infty \), denote by \({\text {Cone}}^\bullet _\omega (X, \sigma _n)\) the metric space obtained by fixing a basepoint and taking \(x_n\) equal to the basepoint for all n in the previous definition. This does not depend on the basepoint.
Remark 1
When \(\sigma _n \rightarrow 0\) and \((x_n)\) is a constant sequence, the space
is more commonly referred to as a metric tangent. However because our emphasis is on large-scale geometry and moving basepoints, and because the distinction would be artificial here, we denote both by the same name.
Though our main interest is in homogeneous spaces, it is useful to work out some examples of asymptotic cones of nonhomogeneous spaces in order to appreciate the difference between quasiisometry and O(u)-bilipschitz equivalence.
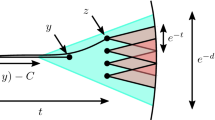
Examples 4
For \(i \in \lbrace 1, \ldots , 4 \rbrace \) let \(P_i\) be a Riemannian plane with metric \(ds^2 = dr^2 + A_i(r)^2 d\theta ^2\), where \(A_1(r) = 1/r\), \(A_2(r) = 1\), \(A_3(r)= \log r\) and \(A_4(r) = r/2\) for r large enough. See some sketches of \(P_i\) on Fig. 1, and various cones on Table 1.

Sketch view of the four Riemannian planes of Example 4 with \(\mathrm {U}(1)\) symmetry
Proposition 3
(Characterizing quasiisometries I) Let X and Y be geodesic metric spaces, and let \(\phi : X \rightarrow Y\). Then, \(\phi \) is a quasiisometry if and only if for every \((\sigma _n)\) such that \(\lim _n \sigma _n = +\infty \), it holds:



and then, given any such \(\sigma _n\), for all pair \((x_n)\in X^{{\mathbf {N}}}\) and \((y_n) \in Y^{{\mathbf {N}}}\), either \(\phi ({\text {Precone}}(X,x_n, \sigma _n)) \cap {\text {Precone}}(Y,y_n, \sigma _n)\) is empty or for every \(\omega \in \beta {\mathbf {N}} \setminus {\mathbf {N}}\), \(\phi \) induces a bilipschitz homeomorphism
whose bilipschitz constant only depends on \(\phi \).
Proof
Assume that \(\phi \) is not a quasiisometry. Especially it is not a coarse equivalence, which means that there exists a sequence of positive numbers \((\rho _n)\) where \(\rho _n \rightarrow + \infty \) as \(n \rightarrow + \infty \), such that at least one of the following is true:
-
1.
\(\phi \) is not a coarse embedding: there exists an integer \(M \ge 0\) and sequences of points \((x_n, x'_n)\) in X such that
-
a.
either \(d(x_n, x'_n) \le M\) and \(d(\phi (x_n), \phi (x'_n)) \ge \rho _n\)
-
b.
or \(d(x_n, x'_n) \ge \rho _n\) and \(d(\phi (x_n), \phi (x'_n)) \le M\),
or
-
a.
-
2.
\(\phi \) is not coarsely surjective: there exists a sequence of points \((y_n)\) in \(Y^{{\mathbf {N}}}\) such that \(d(y_n, \phi (X)) \ge \rho _n\).
In case 1a, \((x_n) \sim _{\rho _n^{1/2}} (x'_n)\) whereas \((\phi (x_n)) \not \sim _{\rho _n^{1/2}} (\phi (x'_n))\), contradicting (\(\mathrm {I}_\sigma \)) for \(\sigma _n = \rho _n^{1/2}\). In case 1b, note that \(\phi (x_n) \approx _{\rho _n} \phi (x'_n)\), while \(x_n \sim _{\rho _n} x'_n\) does not hold, contradicting (\(\mathrm {II}_\sigma \)) with \(\sigma = \rho \). If 2 holds, then (\(\mathrm {III}_\sigma \)) does not hold with \(\sigma _n = \rho _n^{1/2}\).
Conversely, assume that \(\phi \) is a \((\kappa , c)\)-quasiisometry. Then \(x_n \sim _{\sigma _n} y_n\) means that \(d_X(x_n, y_n) \le C \sigma _n\) for some \(C \ge 0\), so that \(d_Y(\phi (x_n), \phi (y_n)) \le \kappa C \sigma _n + c \le (\kappa C + 1) \sigma _n\) for \(n > \sup \lbrace m : \sigma _m \le c \rbrace \). This proves (\(\mathrm {I}_\sigma \)); the proof of (\(\mathrm {II}_\sigma \)) goes the same way using the left inequality in (4) with \(\rho _-(r) = \kappa ^{-1}r - c\).
Finally, if \(\phi \) is a quasiisometry, then for every parameters \((x_n), (y_n), (\sigma _n)\) as above with \(\sigma _n \rightarrow + \infty \), \(\phi \left( {\text {Precone}}(X, x_n, \sigma _n) \right) \cap {\text {Precone}}(Y,y_n, \sigma _n)\) is equal to
and in the latter case, for every \(\omega \in \beta {\mathbf {N}} \setminus {\mathbf {N}}\), \({\text {Cone}}_\omega (\phi , x_n, \sigma _n)\) is a bilipschitz homeomorphism, with bilipschitz constant \(\kappa \) independent of \(\omega \). \(\square \)
Proposition 4
(Characterizing quasiisometries, II) Let X and Y be geodesic metric spaces and \(\phi : X \rightarrow Y\). If for all \((x_n, y_n) \in X^{{\mathbf {N}}} \times Y^{{\mathbf {N}}}\) and \((\sigma _n)\) a sequence of positive numbers with limit \(+\infty \), either
or \({\text {Cone}}_\omega (\phi )\) is well-defined and a bilipschitz homeomorphism for all \(\omega \), then \(\phi \) is a quasiisometry.
Proof
The first hypothesis implies, for every \(\sigma \), the conditions (\(\mathrm {I}_\sigma \)) and (\(\mathrm {II}_\sigma \)) of Proposition 3 for \(\phi \) (where the injectivity of the coned map implies (\(\mathrm {II}_\sigma \))). Similarly, the second hypothesis implies, for every \(\sigma \), (\(\mathrm {I}_\sigma \)), (\(\mathrm {II}_\sigma \)) and (\(\mathrm {III}_\sigma \)). \(\square \)
The characterization given by Proposition 4 may be summarized as follows: a quasiisometry is a map between metric spaces which, when photographed between any pair of asymptotic cones with equal scaling factors, is either completely undefined or induces a bilipschitz homeomorphism.
As mentionned in the introduction, o(r)-bilipschitz equivalences are the maps inducing bilipschitz homeomorphisms between asymptotic cones with fixed basepoints. This is less demanding than the previous characterization. We recall Cornulier’s characterization below.
Proposition 5
(Cornulier) Let X and Y be pointed metric spaces. Denote by \(\vert \cdot \vert \) the distance to the basepoint in X and in Y. Let \(\phi : X \rightarrow Y\). The following are equivalent:
-
(5.1)
\(\phi \) is o(r)-bilipschitz, i.e. There exists \(\kappa \ge 1\) and \(v: {\mathbf {R}}_{\ge 0} \rightarrow {\mathbf {R}}_{\ge 0}\) with \(\lim _{r + \infty } v(r)/r = 0\) and for every \((x,x')\in X\) and \(y \in Y\),
$$\begin{aligned} -v(\vert x \vert \vee \vert x' \vert ) + \frac{1}{\kappa } d_X(x,x')&\le d_Y(\phi (x), \phi (x')) \\&\le \kappa d_X(x,x') + v(\vert x \vert \vee \vert x' \vert ) \\ d_Y(y, \phi (x))&\le v (\vert y \vert ), \end{aligned}$$ -
(5.2)
For every sequence \((\sigma _n)\) of positive real numbers with \(\sigma _n \rightarrow + \infty \), there is a well-defined, bilipschitz homeomorphism

where we recall that \({\text {Cone}}^\bullet \) denotes the asymptotic cone with observation centers fixed at basepoint according to Definition 4.

Proof
This results from the combination of [16, Propositions 2.4, 2.5, 2.9, 2.12 and 2.13]. There is no sequence \(\sigma _n\) in Cornulier’s statement, however the formulations are easily seen to be equivalent to ours. \(\square \)
In this way, the groupoids of quasiisometries and o(r)-bilipschitz equivalences respectively are the largest groupoids over metric spaces so that the parametrized family of functors \({\text {Cone}}\) and \({\text {Cone}}^\bullet \) respectively are well defined to the groupoid of metric spaces with bilipschitz homeomorphism. Note that when characterizing quasiisometries in Proposition 3, we only assumed that \(\phi \) has to be well defined at the level of asymptotic cones, and then the bilipschitzness of every \({\text {Cone}}(\phi )\) came for free, with a common bilipschitz constant.
On the other hand, it is explicitely required in Proposition 5 that the map be bilipschitz through asymptotic cones. There is indeed a strictly larger groupoid, that of isomorphisms in the category of cone-defined maps in Cornulier’s terminology, whose pictures through \({\text {Cone}}^\bullet \) only have nonzero and finite local lipschitz and expansion constant at basepoint; see [16, Sect. 2.2] for characterizations of this category.
Let us state a refinement of (5.1) \(\implies \) (5.2) in the last Proposition.
Proposition 6
Let X and Y be metric spaces. Let \(\phi : X \rightarrow Y\) and assume that (5.1) holds for some \(\kappa \) and v, where v is admissible (Definition 3). Then for every sequence \((\sigma _n)\) of positive real numbers and for every \((x_n) \in X^{{\mathbf {N}}}\) such that \(\limsup v(\vert x_n \vert ) / \sigma _n = 0\), \(\phi \) induces a bilipschitz homeomorphism
Proof
This conveniently follows from [53], by setting for any \(\rho >0\), \(X_n = B(x_n, \rho \sigma _n)\), \(t_n = v((1+\rho ) \vert x_n \vert )\) and \(\phi _n = \phi _{\mid X_n}\). Since \(t/\sigma \) is infinitesimal, by [53, Lemma 1.16] the sequence \(\phi _n\) defines \(\phi _\omega \) between the ultralimits of the spaces \(X_n/\sigma _n\), namely, the ball of radii \(\rho \) in the asymptotic cones. \(\square \)
In Proposition 6 the assumption that v be admissible is necessary. Otherwise \(t_n\) may not be negligible when compared to \(\sigma _n\), which is necessary assumption so that the sequence \(t_n/\sigma _n\) defines an infinitesimal number in the real field \(\prod _\omega {\mathbf {R}}\) for every ultrafilter \(\omega \).
As an application, we can now distinguish the nonhomogeneous spaces from Examples 4:
-
None of \(P_1\), \(P_2\), \(P_3\) is o(r)-bilipschitz to \(P_4\) since \(\dim {\text {Cone}}^\bullet _\omega (P_i)\) is 1 for \(i=1,2,3\) and 2 for \(i=4\).
-
\(P_2\) and \(P_3\) are \(O(\log )\)-bilipschitz through the identity map in polar coordinates, but they are not \(O(\log ^{1-\epsilon })\)-bilipschitz equivalent for any \(\epsilon >0\), since \(\dim {\text {Cone}}_\omega (P_2, x_n, n) = 1\) and \(\dim {\text {Cone}}_\omega (P_3, x_n, n) = 2\) if \(\vert x_n \vert = e^n\) (See Table 1) and \(\log (e^{n})^{1-\epsilon } \ll n\).
-
\(P_1\) and \(P_2\) are quasiisometric; however they are not O(u)-bilipschitz equivalent for \(u \rightarrow 0\).
2.3.1 On cone dimension
We have seen that the covering dimension of (moving) cones is an efficient tool to discriminate between the Examples 4 up to quasiisometry or O(u)-bilipschitz equivalence. When X is co-boundedly acted upon, however (which is one case of interest for geometric group theorists) all its asymptotic cones are isometric once the ultrafilter is fixed. Hence, computing \(\dim {\text {Cone}}_\omega \) for fixed \(\omega \) will provide the same information with respect to QI or SBE.
Beyond geometric models of polynomially growing groups G, it should not be expected that different ultrafilters will yield isometric or even just homeomorphic asymptotic cones; an extensive litterature and even the notion of lacunary hyperbolic group on its own have been built over this distinction ([31, 50, 68]). If G is a simply connected, completely solvable Lie group with a completely solvable \({\mathfrak {g}}\), nevertheless, then for every geometric model X, \(\omega \in \beta {\mathbf {N}} \setminus {\mathbf {N}}\) and \(\sigma _n\) with \(\lim _{\sigma _n} = +\infty \),
where \(G^{\mathrm {nil}}\) is the largest nilpotent quotient of G [15]. Following Cornulier we denote this integer \({\text {conedim}}\). This is the first, and perhaps the most natural numerical SBE invariant.
In the special case when G is nilpotent, (conedim) follows from the earlier construction of Pansu, which can be formulated in terms of Gromov-Hausdorff convergence with no reference to a ultrafilter [63]. Beware that this limit is not functorial, however.
When no homogeneity assumption is made, the dimension of the asymptotic cone (even with fixed basepoint) depends not only on the ultrafilter but also on the scaling sequence. One encounters four-dimensional complete Riemannian spaces with positive Ricci curvature and \({\text {SU}}(2)\) symmetry, for which the covering dimension of the asymptotic cones can be 2 or 4 depending on how one chooses the scaling factors [42]. These cones are genuine rescaled Gromov-Hausdorff limits, obtained without passing to a subsequence and thus do not depend on the ultrafilter.
2.4 Coarse structures
In the 1930s, Weil abstracted the notion of a uniform structure from the topology of locally compact groups. Coarse structures are large-scale counterparts of uniform structures; they were introduced by Roe in the 1990s. We recall below the definition of a coarse space.
Let X be a set. The square \(X \times X\) is a groupoid for the composition law \((x_0, x_1) \circ (x_1, x_2) = (x_0, x_2)\) and \((x_0, x_1)^{-1} = (x_1, x_0)\) for \(x_0, x_1, x_2 \in X\). For \(E, F \subseteq X \times X\), define \(E \circ F = \lbrace e \circ f : e \in E, f \in F\rbrace \) and \(E^{-1} = \lbrace e^{-1} : e\in E \rbrace \).
Definition 5
([66, Definition 2.3]) A collection \({\mathcal {E}} \subseteq {\mathfrak {P}}(X \times X)\) is called a coarse structure if it contains the diagonal \(\varDelta _{X \times X}\), is stable by composition, inverse, taking subsets, and taking finite unions; the subsets \(E \in {\mathcal {E}}\) are called entourages.
A coarse structure \({\mathcal {E}}\) is called monogenic if it is generated by a single entourage, that is if there exists \(E \in {\mathcal {E}}\) such that \({\mathcal {E}}\) is smallest among all coarse structures containing E. Note that this notion has no analog among uniform structures.
Definition 6
(Coarse equivalence) Given two coarse spaces \((X, {\mathcal {E}}_X)\) and \((Y, {\mathcal {E}}_Y)\) and a map \(\phi : X \rightarrow Y\), we say that \(\phi \) is coarse if
-
(6.a)
for all \(B \subseteq Y\), \(B \times B \in {\mathcal {E}}_Y \implies \phi ^{-1}(B) \times \phi ^{-1}(B) \in {\mathcal {E}}_X\) and
-
(6.b)
for all \(E\in {\mathcal {E}}_X\), \((\phi \times \phi ) (E) \in {\mathcal {E}}_Y\), where \(\phi \times \phi (x,y) = (\phi (x), \phi (y))\).
A pair of coarse maps \(\lbrace \phi : X \rightarrow Y\), \(\psi : Y \rightarrow X \rbrace \) realizes a coarse equivalence if the graphs of \(\phi \circ \psi \) and \(\psi \circ \phi \) are both contained in entourages of the coarse structures.
Proposition 7
(O(u)-coarse structure, o(v)-coarse structure) Let \(u: [0, +\infty ) \rightarrow (0,+\infty )\) be a an admissible function, let v be either an admissible function or \(v(r) = r\), and let \((X, d_X)\) be a metric space. Given some \(o \in X\), define
where \(\vert x\vert = d_X(o,x)\) and \(\limsup \) are taken as \((x,x')\) evades every bounded set fixed in advance (for the sup distance in \(X \times X\)). \({\mathcal {E}}^{O(u)}\) and \({\mathcal {E}}^{o(v)}\) define coarse structures on X.
The bounded coarse structure is \({\mathcal {E}}_X^{O(1)}\), and the coarse equivalences between metric spaces equipped with \({\mathcal {E}}_X^{O(1)}\) are the coarse equivalences as defined in (4). Wright’s \(c_0\) coarse structure is \({\mathcal {E}}^{o(1)}\) [71, Definition 1.1]. Dranishnikov and Smith’s sublinear coarse structure is \({\mathcal {E}}^{o(r)}\) (See Sect. 2.5) [24] (Fig. 2).

Some entourages of the O(u)-coarse structure on the half real line \(X = [0, +\infty )\), with \(u(r) = \sqrt{r}, u(r) = 1\) and \(u(r) = 1/r\)
Proof
We need to check Roe’s axioms. In view of (6) and (7) it is clear that \({\mathcal {E}}_X^{O(u)}\) and \({\mathcal {E}}_X^{o(v)}\) are closed under finite union and taking subsets. Possibly left nonobvious is the stability when taking inverses and composing.
Inverses. Fix a basepoint o and take a sequence \(x_n, x'_n\) such that \(\sup (\vert x_n\vert , \vert x'_n \vert ) \rightarrow +\infty \), with \(d_X(x_n, x'_n) \le K u(\vert x_n \vert )\) for some \(K \ge 0\) when n is large enough, resp. \(d_X(x_n, x'_n) \le k_n v(\vert x_n \vert )\) where \(k_n \rightarrow 0\). We need to prove that \(d_X(x_n, x'_n) \le L u(\vert x'_n \vert )\) for some \(L\ge 0\), resp. \(d_X(x_n, x'_n) \le \ell _n v(\vert x'_n \vert )\) for some \(L\ge 0\) when n is large enough.
We claim that
Indeed, if it were not the case there would be a sequence \(R_n\) such that for arbitrarily large values of D, either for arbitrarily large n, \(\vert x_n \vert \le R_n \le DR_n \le \vert x'_n \vert \) or for arbitrarily large n, \(\vert x'_n \vert \le R_n \le DR_n \le \vert x_n \vert \). In the first case, along a sub-sequence, by the triangle inequality \(\vert x'_n \vert \le R_n + Ku(R_n)\) (where we may replace u by v and K by some \(k_{n_0}\) if necessary) contradicting the hypothesis that \(\vert x'_n \vert \ge DR_n\) for n large enough (observe that \(\vert x'_n \vert \rightarrow +\infty \) along that sub-sequence). In the second case, again by the triangle inequality one would have \(R_n \ge \vert x_n \vert - Ku(\vert x_n \vert )\) (or \(\vert x_n \vert - k_{n_0} \vert x_n \vert \) if necessary); but the right-hand side can be assumed greater than \(\vert x_n \vert /2\) for n large enough if D is set large enough; this is a contradiction. Now from (8) and the property that u, resp. v is admissible, we obtain that also
(resp. the same with v replacing u), which provides the requested constant L (resp. \(\ell _n\)) as a function of K (resp. of \(k_n\)) and u, resp. v. At this point it is useful to record that we can rewrite \({\mathcal {E}}\) in a more symmetric way:
Composition. Start assuming u is nondecreasing; we will explain how to adapt the proof in case it is not the case in the end (this philosophy was alluded to after Lemma 1). For every \(K, r \ge 0\), introduce
We need to prove that for every K, L there are r, s, t and \(\eta (K,L)\) such that
Let \((x,x'') \in E_L \circ E_K\). By definition, there exists \(x' \in X\) such that \(d_X(x,x') \le K(u(\vert x \vert ) + u(\vert x' \vert ))\) and \(d_X(x',x'') \le L(u(\vert x' \vert ) + u(\vert x'' \vert ))\).
Set a radius \(R = \sup \left\{ r \ge 0 : u(r) > r/(2K+1) \right\} \). We claim that
To prove (10) we proceed by exhausting all the case arising from the comparison of \(\vert x \vert \) and \(\vert x' \vert \) with R.
First, note that either \(\vert x' \vert \le R\), or \(\vert x' \vert > R\) and then \(u(\vert x' \vert ) \le \frac{\vert x' \vert }{2K+1}\). In the second case, by the triangle inequality
so that \(\vert x' \vert \le 2 \vert x \vert + 2 K u(\vert x \vert )\). So we always have \(\vert x' \vert \le \sup (R, 2 \vert x \vert + 2 Ku(\vert x \vert ))\). Since u has been assumed nondecreasing,
Now, either \(\vert x \vert \le R\), in which case \(u(\vert x' \vert ) \le \sup (u(R), u(3 \vert x \vert )\) and (10) holds, or \(\vert x \vert > R\) and then \(2Ku(\vert x \vert ) \le \vert x \vert \), so \(u(\vert x' \vert ) \le K \sup (u(3R), u(3 \vert x \vert ))\): (10) holds as well. We can now finish the proof using the claim. By the triangle inequality,
so we may set \(\eta (K,L) = 2(K+L) \limsup _{r \rightarrow + \infty } u(3r) /u(r)\); then for r large enough and arbitrary s, (9) holds.
We now return to the general case when u is not assumed non-decreasing. If \(\vert x' \vert \le R\) then there is a uniform bound on \(\vert x \vert \). If \(\vert x' \vert > R\) then by the triangle inequality,
so that \(\vert x' \vert \ge 2 \vert x \vert /3 - 2 Ku(\vert x \vert )/3\). As soon as \(\vert x \vert \ge R\), \(\vert x' \vert \ge \vert x \vert /3\). Using the assumption that u is admissible, then, \(u(\vert x'\vert ) \le Bu(\vert x \vert )\) for some \(B \ge 1\). Using the same line of reasonning as before, this implies (9) with \(\eta (K,L) = B(K+L)\). \(\square \)
Proposition 8
Let X and Y be metric spaces. The following statements hold:
-
(1)
Let \(u:[0,+\infty ) \rightarrow (0,+\infty )\) be an admissible function. Let \(\phi : X\rightarrow Y\) be a O(u)-bilipschitz equivalence. Then \(\phi \) induces a coarse equivalence \((X, d_X, {\mathcal {E}}^{O(u)}) \rightarrow (Y, d_Y, {\mathcal {E}}^{O(u)})\).
-
(2)
Let \(\phi : X\rightarrow Y\) be a o(r)-bilipschitz equivalence. Then \(\phi \) induces a coarse equivalence \((X, d_X, {\mathcal {E}}^{o(r)}) \rightarrow (Y, d_Y, {\mathcal {E}}^{o(r)})\).
Proof
Let us prove (1) first. Let \((x_n, x'_n)\) be sequences of points with \(d(x_n, x'_n) \le Mu(\vert x_n \vert )\) and \(\vert x_n \vert \rightarrow + \infty \). Then, for n large enough, \(\vert x'_n \vert \le 2 \vert x_n \vert \). Hence
for some \(C \ge 1\). But also, for n large enough,
So there exists a constant \(C'\) so that \( d(\phi (x_n), \phi (x'_n)) \le C'u(\vert \phi (x_n) \vert ). \) On the other hand, \(\phi \) has axiom (6.a) by (11). This proves that \(\phi \) is a coarse map. \(\phi \) has a coarse inverse \({\widetilde{\phi }}\) such that \(d({\widetilde{\phi }} \circ \phi (x), x) \le c'u(\vert x \vert )+c'\) for all and \(x \in X\) and \(d({\phi } \circ {\widetilde{\phi }}(y),y) \le c'u(\vert y \vert ) + c'\) for all \(y\in Y\) [19, Proposition 2.4]. So \(\phi \) is a coarse equivalence from \((X, d_X, {\mathcal {E}}^{O(u)})\) to \((Y, d_Y, {\mathcal {E}}^{O(u)})\).
Now let us turn to (2). Let \(\phi :X \rightarrow Y\) be a o(r)-bilipschitz equivalence; this means that there exists a function v and a constant \(\kappa \ge 1\) such that \(v(r) = o(r)\) and
and \(d(y, \phi (X)) \le v(\vert y \vert )\) for all \(x,x' \in X\) and \(y \in Y\). Let \((x_n), (x'_n)\) be such that \(\vert x_n \vert \rightarrow + \infty \) and \(d(x_n, x'_n) / \vert x_n \vert \rightarrow 0\) as \(n \rightarrow + \infty \). Fix \(\varepsilon \in (0,1)\). For n large enough, \(v(2 \vert x_n \vert ) \le \frac{\varepsilon }{2 \kappa } \vert x_n \vert \), \(d(x_n, x'_n) \le \frac{\varepsilon \vert x_n \vert }{2\kappa ^2} \), and \(\vert \phi (x_n) \vert \ge \vert x_n \vert /2 \kappa \) (as in (11) in the previous case) so that
Hence, \(\phi \) is a coarse map. Again, by [19, Proposition 2.4] there is \({{\widetilde{\phi }}} :Y \rightarrow X\) and a positive constant \(c'\) such that \(d({{\widetilde{\phi }}} \circ \phi (x), x) \le v(\vert x \vert ) + c'\) and \(d(\phi \circ {{\widetilde{\phi }}} (y), y) \le v(\vert y \vert ) + c'\) for all \(x \in X\) and \(y \in Y\). So \(\phi \) is a coarse equivalence from \((X, d_X, {\mathcal {E}}^{o(r)})\) to \((Y, d_Y, {\mathcal {E}}^{o(r)})\). \(\square \)
Lemma 2
Assume that \((X, d_X)\) is a geodesic metric space. Let u be admissible and unbounded. Then \( E_u = \left\{ (x,x') \in X \times X: d_X(x,x') \le 1 + u(\vert x \vert + \vert x' \vert ) \right\} \) is a symmetric entourage generating \({\mathcal {E}}^{O(u)}\) on X. Define \({\widehat{d}}_X\) on X such that
Then, the identity map \( \left( X, d_X, {\mathcal {E}}^{O(u)} \right) \rightarrow \left( X, {\widehat{d}}_X, {\mathcal {E}}^{O(1)} \right) \) is a coarse equivalence.
Proof
Let us check first that \(E_u\) generates \({\mathcal {E}}\). Take \(E \in {\mathcal {E}}^{O(u)}\); then by definition
For all \((x,x')\), and for every segment \(\gamma : [0, d_X(x,x')] \rightarrow X\) and set \(x_1 = \gamma (1+u(\vert x \vert )), x_2 = \gamma (2+u(\vert x \vert ) + u(\vert x_1 \vert )), \ldots \). Let
We claim that \(\sup _{(x,x')\in E} \inf _\gamma N < +\infty \). Indeed, if x and \(x'\) are far enough there exists some constant \(\mu >0\) such that \(u(\vert x_k \vert ) \ge \mu u(\vert x \vert )\) as long as \(\vert x_k \vert \ge \vert x \vert /2\), especially as long as \(k + u(\vert x \vert ) + \cdots + u(\vert x_k \vert ) \le \vert x \vert /2\). So either \(N(x,x') \le \lceil M/\mu \rceil \) or \(N +u(\vert x \vert ) + \cdots + u(\vert x_N \vert ) > \vert x \vert /2\). But in the latter case,
where we used the definition of N on the right. To reach a contradiction, note that again by the definition of N, \(d(x_N, x') < 1+ u(\vert x_N \vert )\), so there exists L such that \(d(x_N, x') \le 1+ Lu(\vert x' \vert )\), reproducing the reasoning in the “Inverse” part of the proof of Proposition 7. Hence, there exists some constant \(M'\) such that if \(x'\) is far enough, \(u(\vert x_N \vert ) \le M' u(\vert x' \vert )\). Plugging this in (12) yields an inequality of the form \(u(\vert x' \vert ) + u(\vert x \vert ) \ge \rho \vert x \vert \) for some \(\rho >0\), which can only occur if \(\vert x \vert \) is close to the origin. We conclude that \(E \subseteq E_u^{N_{\max }}\), where \(N_{\max } = \sup _{(x,x')\in E} \inf _\gamma N\) is a finite integer.
This proves that \((X, d_X, {\mathcal {E}}^{O(u)} ) \rightarrow ( X, {\widehat{d}}_X, {\mathcal {E}}^{O(1)} )\) has the axiom (6.b) of a coarse map. In order to check (6.a) we must prove that if \(B \times B\) is in \({\mathcal {E}}^{O(u)}\) then B is bounded; fixing \(x \in B\), by (6), for any sequence \(x'_n\) that escape to infinity \(x'_n\) cannot stay in any entourage of \({\mathcal {E}}^{O(u)}\) fixed in advance. Conversely, if B is bounded then \(B \times B\) is in \({\mathcal {E}}^{O(u)}\), while axiom (6.b) holds for \((X, {\widehat{d}}_X, {\mathcal {E}}^{O(1)} ) \rightarrow ( X, d_X, {\mathcal {E}}^{O(u)} )\) by definition of \({\widehat{d}}\). \(\square \)
The new distance \({\widehat{d}}_X\) may be made geodesic as well, by adding metric edges between pairs of point at distance 1. Note however that one may lose properness in this process.
If (X, d) has an isometric group action, this group action will not be an isometric group action for \((X,{\widehat{d}}_X)\). In fact the main interest of \({\widehat{d}}_X\) is theoretical, and appears in the next Proposition.
Say that a map \(\phi : X \rightarrow Y\) between pointed metric spaces is radial if there exists \(\kappa \ge 1\) and \(R, R' \ge 0\) such that for all \(x \in X\),
Also, call discrete geodesic between x and \(x'\) at distance n in X a finite sequence of points \(x_i\) with \(x=x_0\), \(x_n=x'\) and \(d(x_i, x_{i+1}) = 1\).
Proposition 9
Let X and Y be geodesic metric spaces, and let \(\phi : X \rightarrow Y\) be a \(O(\log )\)-coarse equivalence. Then
-
(1)
\(\phi \) is radial.
-
(2)
\(\phi \) is a \(O(\log )\)-bilipschitz equivalence.
We need a preliminary Lemma.
Lemma 3
Let t and s be positive real numbers. Then for every \(M > 0\), there exists \(R\ge 1\) and \(M' > 0\) such that
Proof
We will prove first a weaker inequality and then self-improve it. Taking logarithms on both sides we get \(\log t - \log \log t \le \log M + \log s - \log \log s\), so for every \(\varepsilon > 0\) one has, for s and t large enough, \((1-\varepsilon /2) \log t \le (1+ \varepsilon /2) \log s\), and then \(t \le s^{1+\varepsilon }\). Now, assume by contradiction that there is a sequence \((s_n, t_n)\) with \(t_n / \log t_n \le M s_n / \log s_n\), but \(q_n = t_n /s_n\) going to infinity. Then \(t_n/\log t_n = t_n /(\log s_n + \log q_n)\); but we know that \(\log q_n \le \varepsilon \log s_n\); so \(t_n / \log s_n \le M' s_n / \log s_n\) for some \(M'\), reaching the desired inequality. \(\square \)
Proof
(Proof of the Proposition 9) Consider the metrics \({\widehat{d}}_X\) and \({\widehat{d}}_Y\) provided by Lemma 2 on X and Y. Then \(\phi : (X, {\widehat{d}}_X) \rightarrow (Y, {\widehat{d}}_Y)\) becomes a O(1)-coarse equivalence. Since \({\widehat{d}}_X\) and \({\widehat{d}}_Y\) are geodesic, \(\phi \) is a \({\widehat{d}}\)-quasiisometry, especially it is \({\widehat{d}}\)-radial.
Now, we need to compare \({\widehat{d}}\) and d. Start with (1); for this we need to compare \(\vert x \vert \) and \({\widehat{d}}(0,x)\) for all \(x \in X\). Let \((x_n)\) be a discrete \({\widehat{d}}\)-geodesic segment from o (we do not specify an endpoint yet). We claim that \(\vert x_n \vert \le 2n \log n + 2n\) for \(n >0\). Let us proceed by induction on n. This holds for \(n=1\). Assume it holds for some \(n >0\). Then,
where we used \(\log 2 < 1\) and \(\log n \le n-1\). Using this inequality, we deduce
Conversely, repeating a construction made in the proof Lemma 2, consider a geodesic segment \(\gamma : [0, \vert x \vert ] \rightarrow X\), and a sequence
and define N such that \(x_N\) is the farthest element from o before reaching x; in this way, \({\widehat{d}}_X(o,x) \le N+1\). By induction on n, we can prove that \(\vert x_n \vert \ge n \log n\) for all n. So
We are now ready to prove (1). We know that \(\phi \) is \(({\widehat{d}}_X, {\widehat{d}}_Y)\)-radial ; so there exists \(\kappa _0\) such that
Combining both inequality, \(\vert \phi (x) \vert \) and \(\vert x \vert \) satisfy the hypotheses of t and s in Lemma 3. We conclude from the Lemma that \(\phi \) is radial.
The proof of (2) will now rely on (1) together with an estimate akin to (14) and (15), but where we replace o with \(x' \in X\). Let \(x, x' \in X\); assume \(2 \le \vert x \vert \le \vert x' \vert \), and let \(\gamma \) be a geodesic segment from x to \(x'\). Define \(x_0 = x\), \(x_{i+1} = \gamma (d(x_0, x_i) + 1 + \log \vert x_i \vert )\) as long as it makes sense (let n be the largest one, so that \(x_n\) is the closest to \(x'\) among all \(x_i\)’s). By the triangle inequality, for all i such that \(0 \le i \le n\),
From this inequality, we deduce that
Conversely, if \(\inf _t \vert \gamma (t) \vert \le \vert x' \vert /2\), then \(d(x,x') \ge \vert x' \vert /2\). So
Otherwise, \(\inf _t \vert \gamma (t) \vert > \vert x' \vert /2\), and then \({\widehat{d}}_X(x,x') \le \frac{d(x,x')}{\log (\vert x' \vert /2)}\). Combining the previous inequalities, we get that for every pair \(x,x'\) with \(\sup (\vert x \vert , \vert x' \vert )\) large enough,
for some \(\lambda _X >1\). A similar inequality holds for pairs of points in Y, with a multiplicative factor \(\lambda _Y\). We are ready to finish the proof. Assume that \(\phi \) is a \((\kappa _0, c_0)\) quasiisometry with respect to \({\widehat{d}}_X\) and \({\widehat{d}}_Y\). Then
for all \(x, x'\). ing \(\lambda = \sup (\lambda _X, \lambda _Y)\) and using (17) and its counterpart in Y,
for some \(c_1 \ge 0\). Using that \(\phi \) is radial, we know that \(\vert \phi (x) \vert \) and \(\vert \phi (x') \vert \) are within linear control from \(\vert x \vert \) and \(\vert x' \vert \). So we may rewrite the previous estimate as
where \(\kappa _1 \ge 1\) and \(c_2 \ge 0\). Multiplying by \(\log \sup (\vert x \vert , \vert x' \vert )\) on both sides yields the required (1). \(\square \)
Remark 2
The assumption \(u =\log \) made in Proposition 9 is possibly too strong. On the other hand, it is not true that every coarse equivalence between o(r)-coarse structure is a o(r)-bilipschitz equivalence: consider \(\phi : {\mathbf {R}}^n \rightarrow {\mathbf {R}}^n\) such that \(\phi (x) = \Vert x \Vert x\). A notable distinction between \({\mathcal {E}}^{O(\log )}\) and \({\mathcal {E}}^{o(r)}\) is that the former is monogenic whereas the latter is not. Also, observe that Lemma 3 breaks down for \(u(t)= t^e\), \(e >0\).
2.5 Invariance of the geometric dimension for connected Lie groups
Definition 7
(sublinear Higson function) Let X be a proper metric space. Define the \({}^\star \)-algebra \(C_{h_L}(X)\) of sublinear Higson functions on X as
where \(f \in C_b\) means that f is continuous, \(\sup \vert f \vert < + \infty \) and \(df(x,x') = f(x) - f(x')\).

Coronae and Gromov boundary for hyperbolic X
Remark 3
(Compare Fukaya [29], 3.1) f is Higson sublinear if and only if there exists \(C_f < + \infty \) such that for all \(x, x'\) in X and \(R >0\) large enough, if \(\inf (\vert x \vert , \vert x' \vert ) \ge R\) and \(d_X(x,x') \le R/2\), then \(\vert f(x) - f(x') \vert \le \frac{C_f}{R}\).
The closure \(\overline{C_{h_L}(X)}\) is a unital \(\mathrm C^\star \)-algebra; the sublinear Higson corona \(\nu _L X\) of X is the spectrum of \(\overline{C_{h_L}(X)}\) modded out by the ideal of functions vanishing at infinity [66, Definition 2.37].
Remark 4
(See Fig. 3) If X is a proper, geodesic, Gromov-hyperbolic space with basepoint o, say that \(f : X \rightarrow {\mathbf {C}}\) is a Gromov function if it is continuous, bounded, and for every \(\varepsilon > 0\) there exists \(K > 0\) such that \((x\mid x')_o > K \implies \vert f(x) - f(x')\vert < \varepsilon \). The Gromov functions on X are Higson sublinear, and the Higson sublinear functions are Higson functions in the classical sense. It follows that the sublinear Higson corona sits in between the Higson corona \(\nu X\) and the Gromov boundary \(\partial _\infty X\) seen in the topological category.
The following is a generalization of [24, Proposition 2.1].
Proposition 10
Let X and Y be metric spaces. Let \(\nu _L X\) and \(\nu _L Y\) be their sublinear Higson coronae. Then, any o(r)-bilispchitz equivalence \(f : X \rightarrow Y\) induces a homeomorphism \(\nu _L f : \nu _L X \rightarrow \nu _L Y\).
Proof
By Proposition 8, a o(r)-bilipschitz equivalence \(X \rightarrow Y\) represents a coarse equivalence \((X, d_X, {\mathcal {E}}^{o(r)}) \rightarrow (Y, d_Y, {\mathcal {E}}^{o(r)})\), and then induces a homeomorphism between the sublinear Higson coronae [66, Corollary 2.42]. \(\square \)
Theorem 5
([24, Theorem 3.10 and Corollary 3.11]; see also [12]) Let X be a proper connected metric space. Assume that \({\text {Isom}}(X)\) is co-compact on X, and that \({\text {asdim}}_{\mathrm {AN}}(X) < + \infty \). Then
Theorem 6
([38, Theorem 7.9]) Let G be a connected Lie group, and let X be any geometric model of G. Then
where K is any maximal compact subgroup of G.
Theorem B from the introduction now follows by combining Proposition 10 with Theorems 5 and 6 .
To the best of the author’s knowledge, the only connected Lie group for which some description of the sublinear Higson corona is currently available is \({\mathbf {R}}^n\): Fukaya proved that \(\nu _L {\mathbf {R}}^n \simeq S^{n-1} \times \nu _L {\mathbf {R}}\) [29]. These spaces are “big” and not metrizable, so it seems not easy to extract fine topological invariants from them as one would do for, say, the Gromov boundary.
Question 7
Let X be a proper metric space. Is the Čech cohomology group \({\check{H}}^1(\nu _L X, {\mathbf {Z}})\) finitely generated?
The answer is known to be negative for the Higson coronae associated to bounded coarse structures [46]; nevertheless Fukaya proves that \(\nu _L \phi \) is homotopic to the identity whenever \(\phi \in {\text {GL}}(n,{\mathbf {R}})\) has positive determinant.
3 Real hyperbolic spaces and Theorem C
In this section we prove Theorem C on Lie groups O(u)-bilipschitz equivalent to real hyperbolic spaces. Section 3.1 gathers preliminary results on pinching and conformal dimension, and Sect. 3.2 sets the terminology of degenerations and deformations. The equivalences of Theorem C are proved in Sect. 3.3.
3.1 Heintze groups, conformal dimension and pinching
In 1955, Jacobson proved that all real Lie algebras who possess a derivation with no purely imaginary eigenvalue are nilpotent [40]. Later Heintze characterized the semidirect products of nilpotent Lie algebra by derivations whose spectrum has positive real part, as the Lie algebras of Lie groups that possess at least one negatively curved left-invariant metric (note that these are centerless) [37]. Most importantly, Heintze showed that the negatively curved metrics on these groups exhaust all the isometrically homogeneous negatively curved manifolds, shedding light on the earlier result of Kobayashi that these spaces had to be simply connected [49].
Definition 8
([20]) Let G be a Lie group with finitely many components. Then G is of Heintze type if there exists a simply connected nilpotent N, a derivation \(\alpha \in {\text {Der}}({\mathfrak {n}})\) with \(\inf \left\{ \Re \lambda : \lambda \in {\text {Sp}}(\alpha ) \right\} > 0\) and a compact group K with a representation \(\rho : K \rightarrow {\text {Aut}}(N)\) such that
where \((k,t).n = \rho (k)(n)e^{\alpha t} n\) (the actions of K and \({\mathbf {R}}\) do commute). A Heintze group is a group of Heintze type with \(K=1\).
By normalized Jordan form of a derivation \(\alpha \) as in Definition 8, we mean the Jordan form of the unique positive multiple \([\alpha ]\) of \(\alpha \) such that
Note that \(N \rtimes _\alpha {\mathbf {R}} \simeq N \rtimes _{[\alpha ]} {\mathbf {R}}\) (Compare Example 2.) The following useful fact is proved in E. Sequeira’s thesis using a highest weight argument [21, Proposition 5.2.2]Footnote 4.
Proposition 11
Let N be a simply connected nilpotent Lie group. If the Heintze groups \(G_\alpha = N \rtimes _\alpha {\mathbf {R}}\) and \(G_\beta = N \rtimes _\beta {\mathbf {R}}\) are isomorphic, then \(\alpha \) and \(\beta \) have the same normalized Jordan form.
Definition 9
(after [26, Sect. 4]) Given two Heintze groups \(G = N \rtimes _\alpha {\mathbf {R}}\) and \(G' = N' \rtimes _{\alpha '} {\mathbf {R}}\) and \(\lambda >0\), we write \(G \; \sharp \; (G')^\lambda = (N \times N') \rtimes {\mathbf {R}}\) where \(t.n = (e^{\alpha t}, e^{\lambda \alpha ' t})\) with the convention that both \(\alpha \) and \(\alpha '\) are normalized as in (21), and call this group Heintze amalgam of G and \(G'\). Denote the Lie algebra of \({\text {Lie}}(G \; \sharp \; (G')^\lambda )\) by \({\mathfrak {g}} \; \sharp \; \lambda {\mathfrak {g}}'\).
A Heintze group is purely real if it is completely solvable, i.e. if \({\text {Sp}}(\alpha ) \subseteq {\mathbf {R}}\); every group of Heintze type has a Riemannian model in common with a purely real Heintze group, that we call its shadow (See [45] and Sect. 5.1). If G, N, \(\alpha \) are as in Definition 8 with \(K=1\) and if \({\mathfrak {n}} = {\text {Liespan}}(\ker ([\alpha ] - 1))\), then we say that G, resp. \({\mathfrak {g}}\) is a Carnot-type Heintze group, resp. algebra. In this case isomorphism type of G does not depend on \(\alpha \), so we abbreviate \(G = N \rtimes _{\mathrm {Carnot}} {\mathbf {R}}\) [18, Proposition 3.5]. Carnot-type Heintze groups are purely real.
Example 1
Let \({\mathbf {K}}\) be a division algebra over \({\mathbf {R}}\) and n a positive integer, \(n=2\) if \({\mathbf {K}} = \mathbf {Ca}\). \({\mathfrak {b}}(n,{\mathbf {K}})\) is the solvable Lie algebra over the vector space \(V = {\mathbf {K}}^{n-1} \oplus \Im {\mathbf {K}} \oplus {\mathbf {R}}\) (where \(\Im {\mathbf {K}} = 0\) if \({\mathbf {K}} = {\mathbf {R}}\)) with Lie bracket
\({\mathfrak {b}}(n, {\mathbf {K}})\) for \({\mathbf {K}} = {\mathbf {R}}, {\mathbf {C}}, {\mathbf {H}}\) is the maximal completely solvable subalgebra of \({\mathfrak {o}}(n,1)\), \({\mathfrak {u}}(n,1)\), \(\mathfrak {sp}(n,1)\) respectively.
The Heintze groups with Lie algebra \({\mathfrak {b}}(n, {\mathbf {K}})\) are exactly those who carry (rank one) symmetric metrics [37] (for \({\mathbf {K}}= {\mathbf {R}}\), all the left-invariant metrics are symmetric, see e.g. [51]).
The topological dimension \({\text {Topdim}} \partial _\infty \) and conformal dimension \({\text {Cdim}} \partial _\infty \) are quasisometry invariant of Gromov-hyperbolic locally compact compactly generated groups ([9, 54]). For a group of Heintze type \(G = (K \times {\mathbf {R}}) \ltimes _\alpha N\),
where \({\text {Tr}}\) denotes the trace. Though not explicitly stated there, the following is a direct consequence of [64, Sect. 5].
Theorem 8
(After Pansu) Let (M, g) be a complete, simply connected Riemannian manifold of dimension \(n \ge 2\). Let \(b \ge 1\). Assume that M is \(-1/b^2\)-pinched, i.e. (up to normalization of g) \(- b^2 \le K_g \le -1\). Then
Proof
It follows from the lower bound on sectional curvature that \({\text {Ric}} \ge (n-1)b^2g\). Then, by the Bishop-Gromov inequality
so that the volume-theoretic entropy \(h = \limsup _{r \rightarrow + \infty } r^{-1} \log {\text {vol}}(B(x,r))\) is bounded above by \((n-1)b\). Pansu proves \({\text {Cdim}} \partial _\infty S \le h\) [64, Lemme 5.2]. Combining these inequalities yields the desired (24). \(\square \)
Corollary 1
Let G be a group of Heintze type; then every Riemannian model of G has a pinching of at least
The bound (25) is not optimal. Building on a theorem of Belegradek and Kapovitch and curvature computations, Healy determined the exact optimal pinching (which is attained) when G is Carnot-type and N has a lattice (equivalently, when \({\mathfrak {n}}\) has a \({\mathbf {Q}}\)-form) and found an optimal pinching of \(-1/s^2\), where s is the nilpotency step of N [27, Theorem 4.3]. Note that for Carnot type groups, s is the spectral radius of \([\alpha ]\) so \({\text {Tr}}[\alpha ] \le s({\text {Topdim}} \partial _\infty G) = s({\text {geodim}} G -1)\).
Corollary 2
Let G be a group of Heintze type. Assume that G has Riemannian models with pinching arbitrarily close to \(-1\). Then \(\alpha \) has all its eigenvalues with the same real part, and N is abelian.
Proof
Order the eigenvalues of \(\alpha \) as \(\sigma _1 \le \cdots \le \sigma _r\). In view of the formula (23) and the assumption on the pinching of G, Pansu’s theorem forces the equality to occur in
So one may set \(\sigma = \sigma _1 = \cdots = \sigma _r\), where \(\sigma \) is a positive real number. Denoting by \({\mathfrak {n}}^\lambda \) the generalized eigenspace of \(\alpha \) with eigenvalue \(\lambda \), observe that \([{\mathfrak {n}}^\lambda , {\mathfrak {n}}^\mu ] \subseteq {\mathfrak {n}}^{\lambda + \mu }\) for any complex numbers \(\lambda \) and \(\mu \). Since \(\oplus _{\tau \in {\mathbf {R}}} {\mathfrak {n}}^{\sigma +i\tau } = {\mathfrak {n}}\), one has \([{\mathfrak {n}}, {\mathfrak {n}}] \subseteq \oplus _{\tau \in {\mathbf {R}}} {\mathfrak {n}}^{2\sigma +i\tau } =\{ 0 \}\), and N is abelian. \(\square \)
Remark 5
The conclusion that N is abelian remains if a single left-invariant metric on S is assumed to be strictly more than quarter-pinched, a theorem by Eberlein and Heber, who also characterized the Heintze groups with a quarter-pinched Riemannian metric [26].
We note that the converse of Corollary 2 also holds.
Proposition 12
Let \(S={\mathbf {R}}^{n-1}\rtimes _\alpha {\mathbf {R}}\), where \({\text {sp}}(\alpha ) \subseteq \lbrace 1 + i \tau : \tau \in {\mathbf {R}} \rbrace \). Then, S has left invariant Riemannian metrics with pinching arbitrarily close to \(-1\). Moreover, if K is a compact group of automorphisms of S, then one can assume that those metrics are all K-invariant.
Proof
Let \(\varepsilon >0\) be a parameter. We consider \((e_1, \ldots ,e_{n-1})\), a basis of \({\mathbf {R}}^{n-1}\) in which \(\alpha \) appears in real Jordan normal form in a definite order that we proceed to describe now. Group the generalized eigenspaces as follows: first the generalized eigenspaces corresponding to Jordan blocks of dimension strictly more than two with a non-real eigenvalue, then the generalized eigenspaces corresponding to Jordan blocks of dimension strictly more than one with a real eigenvalue, then the remaining eigenspaces. There are nonnegative integers m and p such that in the basis
\(\alpha \) has a block upper triangular form with blocks of the form
and
where \(d \ge 1\) denotes the size of the block (the blocks with \(d=1\) being in the end). Consider the left invariant metric \( \langle \cdot , \cdot \rangle _\varepsilon \) such that \({\mathcal {F}}_\varepsilon \) is orthonormal and \(T \perp [{\mathfrak {s}}, {\mathfrak {s}}]\), \(\langle T, T \rangle = 1\) for some T such that \(\alpha = {\text {ad}}(T)\). Decompose \({\text {ad}}(T) = D_\varepsilon + S_\varepsilon \), where \(D_\varepsilon \) is symmetric and \(S_\varepsilon \) is skew-symmetric in \({\mathcal {F}}_\varepsilon \). To express the Riemann curvature tensor, following Heintze, Eberlein and Heber it is convenient to introduceFootnote 5\(N_\varepsilon = D_\varepsilon ^2 +[D_\varepsilon ,S_\varepsilon ]\). For all X, Y, Z in \({\mathfrak {s}}\),
where \({\underline{X}}\), \({\underline{Y}}\) and \({\underline{Z}}\) are the orthogonal projections of X, Y, Z to \([{\mathfrak {s}}, {\mathfrak {s}}]\). (This is differently expressed as in, but still in agreement with, [26] who performed a more general computation where \([{\mathfrak {s}}, {\mathfrak {s}}]\) is not assumed abelian and provided \(R_{X,Y}Z\) for \(X,Y,Z \in [{\mathfrak {s}}, {\mathfrak {s}}]\) and the sectional curvature of all planes.) Any 2-plane \(\pi \) in \({\mathfrak {s}}\) can be generated by \(u, v \in {\mathfrak {s}}\) such that \(v\in [{\mathfrak {s}}, {\mathfrak {s}}]\), so that \(v = {\underline{v}}\). Observe that as \(\varepsilon \rightarrow 0\), \(D_\varepsilon \rightarrow I\) and \(N_\varepsilon \rightarrow I\) so that, denoting by \(\mathrm {sec}^\varepsilon \) the sectional curvature with respect to \(\langle \cdot , \cdot \rangle _{\varepsilon }\),
using that \(\langle u, u \rangle = \langle {\underline{u}}, {\underline{u}} \rangle + \langle u, T \rangle ^2\) and \(\langle {\underline{u}}, {\underline{v}}\rangle = \langle u, v \rangle \). Finally, the pointwise convergence of a rational function on a Grassmanian implies its uniform convergence, so \(\sup {\text {sec}}^\varepsilon - \inf {\text {sec}}^\varepsilon \) goes to zero and \(\sup \mathrm {sec}^\varepsilon / \inf \mathrm {sec}^\varepsilon \) goes to 1 as \(\varepsilon \rightarrow 0\).
Let us now prove the “moreover” part. Start assuming for simplicity that K is connected. Every block \({\mathcal {B}}\) of \(\alpha \) of type \(J_{d}(s)\) or \(J'_{2d}(s)\) for \(d>1\) and \(s \in {\mathbf {C}}\) determines a linear subspace of \({\mathbf {R}}^{n-1}\) of the form \({\text {span}}(e_k,\ldots ,e_{k+d})\) or \({\text {span}}(e_k,\ldots ,e_{k+2d})\) together with a non-trivial flag of subspaces \(\{ {\mathcal {B}}_i^{\triangleleft }\}_{0 \le i \le d-1}\) (in increasing order for inclusion) stabilized by \(\alpha \). Let \(\{ \varphi ^t \}_{t \in {\mathbf {R}}}\) be a one-parameter subgroup of \(K_0\); once restricted to \({\mathcal {B}}^{\triangleleft }_{d-1}\), \(\{ \varphi ^t \}\) being a connected group of automorphisms of \({\mathfrak {s}}\), must stabilize the flag, hence (remembering that \(K_0\) is compact) it must act trivially on \({\mathcal {B}}_{d-1}^\triangleleft \) if \({\mathcal {B}}\) is of type \(J_d\) or within a diagonal torus if \({\mathcal {B}}\) is of type \(J'_d\). Consequently, there are integers r and \(\ell \) such that
where \(K_{0}\) is a compact group stablilizing the direct sum of blocks of type \(J_1(1)\), \(K_{\tau _i}\) stabilizes the direct sum of blocks of type \(J_2(\tau _i)\) for all \(1 \le i \le r\), and the remaining torus \({\mathbf {T}}^\ell \) stabilizes the higher sized blocks of type \(J'\). Then letting \(\mu \) be the normalized Haar measure on K, replace \(\langle \cdot , \cdot \rangle _{\varepsilon }\) with \(\langle X , Y \rangle ^K_\varepsilon = \int _{K} \langle \varphi X, \varphi Y \rangle _\varepsilon d\mu (\varphi )\). If \({\mathcal {F}}'_1 = (e'_1, \ldots , e'_{n-1})\) denotes an orthonormal basis for \(\langle \cdot , \cdot \rangle _1\) that respects the ordered block decomposition of \(\alpha \) (we know there is such a basis thanks to (27)), then \({\mathcal {F}}'_\varepsilon \) obtained from \({\mathcal {F}}'_1\) by rescaling the vectors as in (26) will be orthonormal for \(\langle \cdot , \cdot \rangle ^K_{\varepsilon }\), and one can now apply the previous argument estimating the sectional curvature verbatim.
Finally, K may not be connected, and in this last case, one needs to change slightly the rescaling procedure of the basis to account for the fact that K can now exchange the higher sized blocks. One should reorganize the powers of \(\varepsilon \) so that higher sized blocks of the same type are scaled by the same powers of \(\varepsilon \). Specifically, with the notation as above, \({\mathcal {B}}_i^\triangleleft \) must be spanned by the vectors \(\varepsilon ^i e_k\) in the new basis. In doing so, we preserve the matrices \(D_\varepsilon \) and \(N_\varepsilon \) as they were before, hence the bounds on the sectional curvature. \(\square \)
Remark 6
Using Eberlein and Heber’s amalgams (Definition 9) and curvature estimates would simplify the proof of the first part of Proposition 12 (yet not drastically so) by reducing it to the case where \(\alpha \) has a single Jordan block as Jordan normal form. See also Remark 7.
Question 9
Let \(G = N \rtimes (K \times R)\) be a group of Heintze type. Is it true that among all negatively curved Riemannian models of G, an optimal pinching is attained if and only if \(\alpha \) is diagonalizable over \({\mathbf {C}}\)?
Note that the (Ahlfors-regular) conformal dimension of \(\partial _\infty [{\mathbf {R}}^{n-1} \rtimes _{\alpha } {\mathbf {R}}]\) is attained if and only if \(\alpha \) is diagonalizable over \({\mathbf {C}}\) [3].
3.2 Degenerations and deformations
We provide more information here than is strictly needed for Theorem C. That will be useful to us in the discussion in Sect. 5.1.
3.2.1 Setting
Let \({\mathcal {L}}_n({\mathbf {R}}) \subseteq (\varLambda ^2 {\mathbf {R}}^n)^*\otimes {\mathbf {R}}^n\) be the subset of Lie algebra laws on \({\mathbf {R}}^n\). Note that \(\mu \in \varLambda ^2 ({\mathbf {R}}^n)^*\otimes {\mathbf {R}}^n\) is in \({\mathcal {L}}_n({\mathbf {R}})\) if and only if the Jacobi identity holds in \(\mu \), that is, if and only if
for every \(X_1, X_2, X_3 \in {\mathbf {R}}^n\), the sum being taken over the three positive permutations \(\sigma \) over \(\lbrace 1, 2, 3 \rbrace \). \({\mathcal {L}}_n({\mathbf {R}})\) has two topologies: the Zariski topology, and the topology it inherits as a subspace of \(\varLambda ^2 ({\mathbf {R}}^n)^*\otimes {\mathbf {R}}^n\) with the operator norm, that we will call the metric topology. It follows from Engel’s theorem that the nilpotent laws form a Zariski closed subset \({\mathcal {N}}_n({\mathbf {R}})\).
Let \(\lambda \in {\mathcal {L}}_n({\mathbf {R}})\). \({\mathbf {R}}\), resp. \(\lambda \), is a \(\lambda \)-module for the trivial, resp. the adjoint representation of \(\lambda \). Following Chevalley and Eilenberg [13, Theorem 10.1] there are differential complexes \(K_\lambda \) and \(K'_\lambda \) on \(\varLambda ^\bullet ({\mathbf {R}}^n)^*\) and \(\varLambda ^\bullet ({\mathbf {R}}^n)^*\otimes {\mathbf {R}}^n\) with the following exterior derivatives \(d_\lambda \), resp. \(d_\lambda '\) on degree q-forms, resp. on \(\lambda \)-valued degree q-forms \(\omega \):
The group \({\text {GL}}(n,{\mathbf {R}})\) acts on \({\mathcal {L}}_n({\mathbf {R}})\) by restricting its natural action on \(\varLambda ^2 ({\mathbf {R}}^n)^*\otimes {\mathbf {R}}^n\). We denote the orbit of \(\lambda \) by \(O(\lambda )\) or \(O_{\mathfrak {g}}\) if \({\mathfrak {g}}\) is a Lie algebra isomorphic to \(\lambda \); it is a smooth submanifold of \(\varLambda ^2 ({\mathbf {R}}^n)^*\otimes {\mathbf {R}}^n\) of dimension \(n^2 - \dim {\text {Der}}({\mathfrak {g}})\), embedded in \({\mathcal {L}}_n({\mathbf {R}})\). Moreover, \(T_\lambda {O_{{\mathfrak {g}}}} = B^2(\lambda , \lambda )\), as is most conveniently seen by differentiating the action of \(\mathrm {GL}(n, {\mathbf {R}})\) at \(\lambda \): for every \(\eta \in \mathfrak {gl}({\mathbf {R}}^n)\),
Example 2
Let \({\mathfrak {g}} = \mathfrak {aff}\) be the 2-dimensional affine Lie algebra with basis \(\{ X,T \}\) such that \([T,X] = X\) and dual basis \(\{ dx, dt \}\). Then \(X \otimes dx \wedge dt \in B^2({\mathfrak {g}}, {\mathfrak {g}})\); in the language of Sect. 3.1, \({\mathbf {R}} \rtimes _{1+\varepsilon } \simeq {\mathbf {R}} \rtimes _1 {\mathbf {R}} \simeq {\mathfrak {g}}\).
Definition 10
Let \({\mathfrak {g}}\) and \({\mathfrak {h}}\) be Lie algebras of dimension n over \({\mathbf {R}}\). We say that \({\mathfrak {g}}\) degenerates to \({\mathfrak {h}}\), denoted \({\mathfrak {g}} \rightarrow _{\mathrm {deg}} {\mathfrak {h}}\), if \(\overline{O_{\mathfrak {h}}} \subsetneq \overline{O_{{\mathfrak {g}}}}\) where the closure is taken for the Zariski topology.
Note that it is equivalent to require a single \(\mu \in O_{{\mathfrak {h}}}\) such that \(\mu \in \overline{O_{{\mathfrak {g}}}}\). Since the metric topology is finer than the Zariski topology, a sufficient condition to have \({\mathfrak {g}} \rightarrow _{\mathrm {deg}} {\mathfrak {h}}\) is that there is a sequence \(\lambda _0, \ldots , \lambda _r\) such that
where \(\varphi _t \in \mathrm {GL}(n, {\mathbf {R}})\) is continuous with respect to t.
When \(r=1\), (32) amounts to \(\mu \in \overline{O(\lambda )}^{\, \mathrm { met}}\) and is called a contraction (especially, by the physicists). The author does not know whether the existence of a sequence of contractions as in (32) is a necessary condition for \({\mathfrak {g}} \rightarrow _{\mathrm {deg}} {\mathfrak {h}}\) to hold.
Example 3
(Nilpotent Lie algebras) Let \({\mathfrak {n}}\) be a nilpotent Lie algebra. Let \({\mathfrak {n}} = \oplus _i V_i\) be a linear splitting such that \(V_i \oplus C^{i+1} {\mathfrak {n}} = C^i {\mathfrak {n}}\) for all i. For \(t > 0\), let \((\varphi _t)\) be the one parameter subgroup of \({\text {GL}}({\mathfrak {n}})\) such that
Then, the \(V_i\) becomes a Lie algebra grading on \(\varphi _t.{\mathfrak {n}}\) in the limit when \(t \rightarrow + \infty \): \({\mathfrak {n}}\) degenerates metrically to the graded Lie algebra \({\text {gr}} ({\mathfrak {n}})\) associated to the central filtration of \({\mathfrak {n}}\), supporting the asymptotic cone of the simply connected N by [63]. In particular, \({\mathfrak {n}} \rightarrow _{\mathrm {deg}} {\text {gr}}({\mathfrak {n}})\). (This description of the law in \({\text {gr}}({\mathfrak {n}})\) as a limit is the one given in [8, Sect. 2.1], who prove a generalization of [63].)
For \(\lambda \in \varLambda ^2 ({\mathbf {R}}^n)^*\otimes _{{\mathbf {R}}} ({\mathbf {R}}[[1/t]])^n\), we denote \((\lambda ,t) \mapsto \lambda (t)\) provided that t is in the convergence domain of every coefficient of \(\lambda \), and \(\lambda [1/t^d]\) the monomial of degree d. (The choice of \({\mathbf {R}}[[1/t]]\) over \({\mathbf {R}}[[t]]\) is just a peculiarity for our convenience.) We also denote \(\lambda (\infty )\) the constant term of \(\lambda \). If \(\lambda (t) \in {\mathcal {L}}_n({\mathbf {R}})\) for all \(t \ge 1\), \(\lambda \) is called a formal deformation.
Differentiating (28) to express that \(\lambda \) is a formal deformation with \(\lambda (\infty ) = \mu \) yields an infinite system of equations, the first of which after (28) being
that is, \(\lambda [1/t] \in Z^2(\mu , \mu )\).
Definition 11
Let \({\mathfrak {g}}\) be a Lie algebra over \({\mathbf {R}}\). Let \(\mu \in {\mathcal {L}}_n({\mathbf {R}})\) represent \({\mathfrak {g}}\), and let \(\omega \in H^2({\mathfrak {g}}, {\mathfrak {g}})\) be nonzero. We say that the formal deformation \(\lambda \) integrates the infinitesimal deformation \(\omega \) at \(\mu \) if \(\lambda (\infty ) = \mu \), \(\lambda \) is convergent on \({\mathbf {C}} \setminus \lbrace 0 \rbrace \) and \(\lambda [1/t] \in Z^2(\mu , \mu )\) represents \(\omega \). We say that \(\omega \) is integrable, resp. linearly expandable (as the authors in [1] do) if a formal deformation \(\lambda \) integrates \(\omega \), resp. if \(\lambda \) is a formal deformation of \(\omega \) and \(\lambda = \lambda (\infty ) + \lambda _1/t\) for some \(\lambda _1 \in \varLambda ^2 {\mathbf {R}}^n \otimes {\mathbf {R}}^n\).
In the last Definition, we insisted more on the cohomology class than on the particular cocycle \(\lambda [1/t]\) for the following reason. Two formal deformations \(\lambda , \lambda '\) of \(\mu \) are called equivalent if \(\lambda (t) = \varphi (t). \lambda '(t)\) for some \(\varphi \in {\text {GL}}({\mathbf {R}}[[t]])\) with \(\varphi (\infty ) = 1\). If \(\lambda \) and \(\lambda '\) are equivalent then \(\lambda [1/t] - \lambda '[1/t] \in B^2(\mu , \mu )\); this is a better version of (31), see e.g. Proposition just before §2.5 in [1]. In view of (31), (34) and this, \(H^2({\mathfrak {g}}, {\mathfrak {g}})\) encodes the degree to which \({\mathfrak {g}}\) can be deformed; one should nevertheless beware that infinitesimal deformations are not always integrable (See Remark 8).
3.2.2 Degenerations to \({\mathfrak {b}}(n, {\mathbf {R}})\)
Let \({\mathfrak {b}}(n, {\mathbf {R}})\) denote the maximal completely solvable subalgebra of \({\mathfrak {o}}(n,1)\), namely \({\mathfrak {b}}(n, {\mathbf {R}}) = {\mathbf {R}}^{n-1} \rtimes _1 {\mathbf {R}}\), where the adjoint action of \(1 \in {\mathbf {R}}\) on \({\mathbf {R}}^{n-1}\) is by the identity. The situation of \({\mathfrak {b}}(n, {\mathbf {R}})\) with respect to degenerations and deformations is favorable:
Theorem 10
(After Lauret) Let \({\mathfrak {g}}\) be a completely solvable Lie algebra and \(n \ge 2\) an integer. The following are equivalent:
-
(10.1)
\({\mathfrak {g}}\) contracts to \({\mathfrak {b}}(n, {\mathbf {R}})\).
-
(10.2)
\({\mathfrak {g}} \rightarrow _{\mathrm {deg}} {\mathfrak {b}}(n, {\mathbf {R}})\).
-
(10.3)
\({\mathfrak {g}}\) decomposes as \({\mathbf {R}}^{n-1} \rtimes _{\nu } {\mathbf {R}}\) where \(\nu \) is unipotent.
Moreover, under the former conditions there exists \(\omega \in H^2({\mathfrak {b}}(n, {\mathbf {R}}), {\mathfrak {b}}(n, {\mathbf {R}}))\) linearly expandable into a formal deformation \(\lambda \) such that \(\lambda (1) \in {\mathcal {O}}_{{\mathfrak {g}}}\) and \(\lambda (\infty ) \in O_{{\mathfrak {b}}(n, {\mathbf {R}})}\).
Lauret proved (10.1) \(\iff \) (3) [51, Theorem 6.2] with no a priori assumption on \({\mathfrak {g}}\). The core of the proof below uses the same idea. ([51] additionaly used bounds on pinching and [26] that give constraints a priori on \({\mathfrak {g}}\)).
We need a Lemma which is well-known, however we could only find proofs for the metric topology in the literature.
Lemma 4
Let n be a positive integer and \(0 \le i \le n\). Then, the following are upper semi-continuous with respect to the Zariski topology on \({\mathcal {L}}_n ({\mathbf {R}})\):
-
(a)
The Betti number \(b_p (\lambda ) = \dim H^p(\lambda , {\mathbf {R}})\), for all \(p \ge 0\).
-
(b)
The dimension of the outer derivations \(H^1(\lambda , \lambda ) = {\text {Der}}(\lambda ) / {\text {InnDer}} (\lambda )\).
-
(c)
The dimension of the center \(\dim Z(\lambda )\).
Proof
Note that \(Z(\lambda ) = H^0(\lambda , \lambda )\), so to prove (a), (b) and (c) it is actually sufficient to prove that \(\lambda \mapsto b_p(\lambda )\) and \(\lambda \mapsto \dim H^{p}(\lambda , \lambda )\) are upper semicontinuous on \({\mathcal {L}}_n({\mathbf {R}})\). We will prove this by a change of basis argument. Denote by \(x_{ij}^k\) the coordinate functions on \(\varLambda ^2 ({\mathbf {R}}^n)^*\otimes {\mathbf {R}}^n\), and let \({\mathcal {I}}\) be the ideal of \({\mathbf {R}}[x_{ij}^k]\) generated by the relation (28). Let \(A = {\mathbf {R}}[x_{ij}^k] /{\mathcal {I}}\). Then A is a Noetherian ring by Hilbert’s basis theorem, and \({\mathcal {L}}_n({\mathbf {R}})\) with the Zariski topology is a closed subspace of \({\text {Spec}}(A)\) with the Zariski topology; all the points in \({\mathcal {L}}_n({\mathbf {R}})\) are maximal ideals. Consider the graded A-modules
(Here, \((A^n)^*\) denotes \({\text {Hom}}(A^n,A)\).) For every pair \(y_1,y_2\) in \({\mathbf {R}}[x_{ij}^k]^n\), there is a polynomial z such that \(\lambda (y_1(\lambda ),y_2(\lambda )) = z(\lambda )\) for every \(\lambda \) in \(\varLambda ^2 ({\mathbf {R}}^n)^*\otimes {\mathbf {R}}^n\). The class of z modulo \({\mathcal {I}}\) only depends on the classes of \(y_1\) and \(y_2\) modulo \({\mathcal {I}}\). Hence, there is a well defined application \( A^n \times A^n \rightarrow A^n\), A-linear in both arguments, that we denote by the bracket. In this way \([\cdot , \cdot ]\) defines an element of \(\varLambda ^2(A^n)^*\otimes A^n\). The differentials on K and \(K'\) are defined as in (29) and (30) defining the differentials on \(K_\lambda \) and \(K'_\lambda \) respectively.
In this way \(K_\lambda = K \otimes _A A/\lambda \) and \(K'_\lambda = K' \otimes _A A/\lambda \), where \(A/\lambda \) is the residual field of A at the maximal ideal \(\lambda \). K and \(K'\) are flat A-modules, because being flat is preserved by taking exterior and tensor products over the base ring [52, Proposition 2.3]. We may now conclude by applying the following [36, Théorème 7.6.9(i)]: if A is Noetherian and K is a differential complex of finitely generated flat modules, then for every \(p \ge 0\), the function \(y \mapsto \dim H^p(K \otimes _A k(y))\) is upper semi-continuous on \({\text {Spec}}(A)\), where k(y) denotes the residual field at y. In particular, it is upper semi-continuous on the closed subspace \({\mathcal {L}}_n({\mathbf {R}})\).
\(\square \)
Proof
(Proof of Theorem 10) (1) \(\implies \) (2) is clear.
Assume (2). By Lemma 4, \(b_1({\mathfrak {g}}) \le 1\). If it is zero, then \({\mathfrak {g}}\) is perfect, especially it is not solvable; hence \(b_1 = 1\), and \({\mathfrak {g}}\) splits as a semidirect product
where the restriction of \({\text {ad}}_A\) to \([{\mathfrak {g}}, {\mathfrak {g}}]\) is nonsingular in view of the fact that \(Z({\mathfrak {g}}) = 0\), again by Lemma 4. Choosing an adequate representative \(\lambda _0\) in \(O_{{\mathfrak {g}}}\) and an adequate basis we may as well assume that \([\lambda _0, \lambda _0] = {\mathbf {R}}^{n-1}\) and \(A = (0^{n-1},1)\).
The coefficients of the characteristic polynomial \(P_{\mu , X}\) of \({\text {ad}}_X: Y \mapsto \mu (X,Y)\) are polynomial functions on \({\mathcal {L}}_n({\mathbf {R}})\), and for every \(\lambda _1 \in O(\lambda )\) the spectrum of \(P_{\lambda _1, X}\) is either a nonzero multiple of \({\text {Sp}} (P_{\lambda _0, A})\), or 0 with multiplicity n, the latter case occurring \(X \in [\lambda _1, \lambda _1]\). So, for \(\mu \in \overline{O(\lambda _0)}\) this holds as well. But for \(\mu \in O_{{\mathfrak {b}}(n, {\mathbf {R}})}\), this spectrum is always concentrated at one point. So \({\text {ad}}_A\) cannot have two distinct eigenvalues, and then \([{\mathfrak {g}}, {\mathfrak {g}}]\) is abelian, which proves (3).
Assume (3). Then \(\nu -1\) is nilpotent; let \(X_1, \ldots , X_{n-1}\) be a basis of \([{\mathfrak {g}}, {\mathfrak {g}}]\) in which it appears in lower-triangular Jordan form, \(\nu -1 = \sum _i \delta _i X_{i}^*\otimes X_{i+1}\) where \(\delta _i \in \lbrace 0,1 \rbrace \). One computes that \(d(A^*\wedge X_i^ *\otimes X_{i+1}) = 0\) (Lemma 9; beware that S replaces A there) and that no nonzero linear combination of those is a coboundary (Lemma 8). Setting \(\mu \) the law of \({\mathfrak {b}}(n, {\mathbf {R}})\) in the basis \((X_1, \ldots X_{n-1}, A)\) and \(\omega = A^*\wedge \sum _i \delta _i X_i^*\otimes X_{i+1} \) we find that \(\lambda _0 = \mu + \omega \). Then \(\mu \) is the degeneration of \(\lambda \) through \((\varphi _t)\), where \(\varphi _t A = A\) and \(\varphi _t X_i = t^{-i} X_i\) for all t. \(\square \)
Remark 7
A contraction to (a deformation of) \({\mathfrak {b}}(n, {\mathbf {R}})\) was already used in the proof of Proposition 12; in accordance with [51], contractions can be considered as limit points in the space of left-invariant Riemannian metrics over a given group.
Remark 8
We can additionally check that \(H^3({\mathfrak {b}}, {\mathfrak {b}})=0\) when \({\mathfrak {b}} = {\mathfrak {b}}(2, {\mathbf {R}})\), though it is unnecessary. This vanishing ensures that the deformation system can be solved and every infinitesimal deformation of \({\mathfrak {b}}\) is integrable into a formal deformation [61, p.98]. For nilpotent Lie algebras \({\mathfrak {n}}\) that will be discussed more in detail in Sect. 5.1; on the other hand, one must beware that \(H^3({\mathfrak {n}}, {\mathfrak {n}})\) is large, for instance \(\dim H^3({\mathfrak {n}}, {\mathfrak {n}}) \ge 8\) for all the 6-dimensional nilpotent \({\mathfrak {n}}\) [34, Table 11].
3.3 Groups O(u)-bilipschitz equivalent to \({\mathbb {H}}^n_{{\mathbf {R}}}\)
We prove here Theorem C. Let us first recall some terminology from [20] and [9].
Definition 12
Let G be a Lie group with finitely many components. G is of rank-one type if it has a maximal normal compact subgroup W such that G/W is isomorphic to a simple Lie group \(G_{{\mathbf {R}}}\) of real rank one, with \(Z(G_{{\mathbf {R}}}) = 1\).
Let us proceed to prove the following chains of implications:

-
(C.1) implies (C.3): Let G be a Lie group with finitely many connected components. Assume that G is O(u)-sublinear bilipschitz equivalent to \({\mathbb {H}}_{{\mathbf {R}}}^n\) for some n. Then all asymptotic cones of G being \({\mathbf {R}}\)-trees, G is Gromov-hyperbolic. By Cornulier and Tessera’s theorem [20], G is either of Heintze or rank-one Lie type. First assume that G is of Heintze type, write \(G = (K \times {\mathbf {R}}) \ltimes N\) and call H the co-compact normal subgroup \({\mathbf {R}} \ltimes N\) so that G/K is simply transitively acted upon by H. By [62], \({\text {Cdim}}_{O(u)} \partial _\infty H = {\text {Cdim}}_{O(u)} \partial _\infty {\mathbb {H}}_{{\mathbf {R}}}^n = n-1\). By [19], \( {\text {Topdim}} \partial _\infty H = n-1\). So H is metabelian and every eigenvalue of \(\alpha \) has real part 1. By Proposition 12, (C.3) holds, while by [16, Theorem 1.2], (C.2) holds. If G is of rank-one type, then it acts properly co-compactly by isometries on a rank one symmetric space, which can only be \({\mathbb {H}}^n_{{\mathbf {R}}}\) in view of the equality of conformal dimension and topological dimension of the boundary; especially, (C.2) and (C.3) hold as well.
-
(C.3) implies (C.2): Since it acts geometrically on Gromov-hyperbolic spaces, G is Gromov-hyperbolic. Again by [20], it is of Heintze type or rank-one type. If it is rank-one type, then it is quasiisometric to a rank one symmetric space X; by Pansu’s Theorem 8, \({\text {Cdim}}(\partial _\infty G) = {\text {Topdim}}(\partial _\infty G)\), so \(X = {\mathbb {H}}_{{\mathbf {R}}}^n\). If it is Heintze-type, then it is quasiisometric to a purely real Heintze group of the form \(N \rtimes _{\alpha } {\mathbf {R}}\). Arguing as in the proof of Corollary 2, every eigenvalue of the \([\alpha ]\) is equal to 1. By [16], (C.2) holds.
-
(C.2) implies (C.1): \(u= \log \) is an admissible function.
-
If G is completely solvable then (C.3) implies (C.5): By [20], it is of Heintze type. and by Corollary 2, N is abelian and all the eigenvalues of \(\alpha \) have real part 1.
-
(C.4) and (C.5) are equivalent: This is our version of Lauret’s theorem, Theorem 10.
-
(C.4) implies (C.3) This is a special case of Proposition 12 where all the eigenvalues of \({\text {ad}}_A\) are real.
3.4 Proof of Corollary D
Corollary D follows by applying (C.3) \(\implies \) (C.1) together with Proposition 8.
4 Proof of Theorem E
4.1 Pointed sphere
We will prove the implication (E.1) \(\implies \) (E.3) in Theorem E by establishing a baby case of a variant of Cornulier’s pointed sphere conjecture [75, Conjecture 19.104]. Precisely we establish a special case of the conjecture in the setting of sublinear bilipschitz equivalences rather than quasiisometries for which it is usually formulated. We denote by \({\text {SBE}}^{O(u)}(X)\) the group of self O(u)-bilipschitz equivalences of the metric space X (modulo the relation of O(u)-closeness). Let us first recall that sublinear bilipschitz equivalences induce homeomorphisms of the compact boundary sphere \(\partial _\infty X\) when X is Gromov-hyperbolic [19].
Lemma 5
Let u be an admissible function. Let S be a purely real Heintze group such that [S, S] is abelian, and let \(\varOmega \) be the unique closed orbit of \({\text {SBE}}^{O(u)}(S)\) acting by homeomorphisms on \(\partial _\infty S\). The following are equivalent:
-
(1)
\(\alpha \) has at least two distinct eigenvalues
-
(2)
\(\varOmega \) is reduced to a single point.
Proof
The reasoning is inspired by [64, 6.9 Corollaire]. Let \(\omega \) be the endpoint of a section of the group \({\mathbf {R}} = S/[S,S]\) in S, so that \(\partial _\infty S \setminus \lbrace \omega \rbrace \) is simply transitively acted upon by [S, S]. Assume (1) and let \({\mathcal {F}}\) be the foliation on \(\partial _\infty S \setminus \lbrace \omega \rbrace \) determined by the cosets of \(\ker (\alpha - \lambda )\), where \(\lambda \) is the minimal eigenvalue of \(\alpha \) (since [S, S] is abelian, we may identify it with its Lie algebra). Then by [62, Lemma 3.9], for all sublinear bilispchitz equivalence \(f:S \rightarrow S\), the boundary map \(\partial _\infty f\) preserves \({\mathcal {F}}\). Now let F be any leaf of \({\mathcal {F}}\). Then, \(\lbrace \omega \rbrace \) can be written as \({\overline{F}} \setminus F\) or \(\overline{(\partial _\infty f) F} \setminus (\partial _\infty f) F\), so that \(\partial _\infty f \omega = \omega \). Conversely, if \(\alpha \) only has a single eigenvalue, then S is sublinearly bilipschitz equivalent to real hyperbolic space. Since \({\text {Isom}}({\mathbb {H}}^n_{{\mathbf {R}}})\) is transitive on \(\partial _\infty {\mathbb {H}}^n_{{\mathbf {R}}}\), \({\text {SBE}}^{O(u)}(S)\) is transitive on \(\partial _\infty S\). \(\square \)
Proposition 13
Let u be an admissible function. Let S be a Heintze group. Assume that S is O(u)-bilipschitz equivalent to \({\mathbb {H}}_{{\mathbf {C}}}^2\). Then the shadow of S is isomorphic to \(\mathbf {Heis} \rtimes _{\alpha } {\mathbf {R}}\) where \(\mathbf {Heis}\) is the three-dimensional Heisenberg group and
in a basis (X, Y, Z) of \(\mathfrak {heis}\) such that \([X,Y] = Z\).
Proof
Let \(S_0 = N \rtimes _\alpha {\mathbf {R}}\) be a semidirect product decomposition of the shadow \(S_0\) of S, where N is three-dimensional and \(\alpha \) is normalized so that its lowest eigenvalue is 1. The group S has been assumed O(u)-bilipschitz equivalent to \({\mathbb {H}}_{{\mathbf {C}}}^2\); there are two ways to prove that S and \(S_0\) have geometric dimension 3.
The first is to observe that the Gromov boundary is a topological SBE invariant. Hence \({\text {Topdim}} \partial _\infty S = {\text {Topdim}} \partial _\infty {\mathbb {H}}_{{\mathbf {C}}}^3\), and this is also the dimension of N as a Lie group. The second (less direct) is to apply Theorem B, \(\dim N = {\text {asdim}}_{{\text {AN}}} {\mathbb {H}}^2_{{\mathbf {C}}} - {\text {conedim}} {\mathbb {H}}^2_{{\mathbf {C}}} = 3\). So N is isomorphic either to \({\mathbf {R}}^3\) or to the 3-dimensional Heisenberg group. In the first case, since \({\text {Tr}}(\alpha ) = {\text {Cdim}}_{O(u)}(S) = 4 > 3\), \(\alpha \) has at least two distinct eigenvalues, and by Lemma 5, the unique closed orbit of \({\text {SBE}}^{O(u)}(S_0)\) acting on \(\partial _\infty S_0\) has only one element (namely, \(\omega \) from the proof of 5). This contradicts the fact that \({\text {SBE}}^{O(u)}({\mathbb {H}}^2_{{\mathbf {C}}})\) is transitive on \(\partial _\infty {\mathbb {H}}^2_{{\mathbf {C}}}\), so this cannot be. Consequently, N is isomorphic to the the three-dimensional Heisenberg group. Let \(1, \lambda , \mu \) be the eigenvalues of \(\alpha \), where \(\mu \) corresponds to the eigenvector generating the center of \(\mathbf {Heis}\), and \(1\le \lambda \le \mu \). Necessarily, \(1+\lambda = \mu \) and \(1+\lambda + \mu = 4\), so \(2 + 2 \lambda = 4\), and then \(\lambda = 1\). We deduce from there that \(\alpha \) can only be one of the two derivations in the conclusion. \(\square \)
Proof
(Proof of (E.1) \(\implies \) (E.3)) Let G be as in the statement of Theorem E, namely G is a connected Lie group sublinear bilipschitz equivalent to \({\mathbb {H}}^2_{{\mathbf {C}}}\). Then G is commable to a completely solvable group \(G_0\) [15, Lemma 6.7]. Since \(G_0\) is Gromov-hyperbolic, by [20] it is a purely real Heintze group [20]. We may then apply Proposition 13 to \(G_0\). In the first case where \(\alpha \) is diagonalisable, \(G_0\) (hence G) will be commable to \(\mathrm {SU}(2,1)\), in the second case it will be commable to \(S'\). \(\square \)
Let us mention an application to the quasiisometry classification of Heintze groups. The result below also follows from [47, Theorem A] which appeared during the writing of this paper.
Corollary 3
The groups \(S'\) and \(S'' = {\mathbf {R}}^3 \rtimes _\alpha {\mathbf {R}}\) where
are not quasiisometric.
Indeed, if S and \(S'\) were quasiisometric, they would be \(O(\log )\)-bilipschitz equivalent. But \(S'\) is \(O(\log )\)-bilipschitz equivalent to \({\mathbb {H}}^2_{{\mathbf {C}}}\), whereas \(S''\) is not.
See Table 2 for the Heintze groups of dimension at most 4 and the current knowledge on their \(O(\log )\)-bilispchitz classification (their quasiisometry classification is known and reduces to isomorphism, see [47, Theorem C]).
Remark 9
We can start the same reasoning with \(X = {\mathbb {H}}_{{\mathbf {C}}}^n\), \(n>2\). By conformal dimension, any purely real Heintze group S that is O(u)-bilipschitz equivalent to X has [S, S] isomorphic to \(\mathbf {Heis}^{2k+1} \times {\mathbf {R}}^{2(n-k)}\) for some \(k \in \lbrace 0, \ldots k-1 \rbrace \), where \(\mathbf {Heis}^{2k-1}\) denotes the \(2k-1\)-dimensional Heisenberg group for \(k \ge 2\) and \(H^1 = {\mathbf {R}}\). Otherwise said, using the amalgam notation (Definition 9)
where we recall that \({\mathfrak {b}}(k, {\mathbf {C}})\) is the maximal completely solvable subalgebra of \({\mathfrak {u}}(k, 1)\). But we are only able to prove the pointed sphere conjecture for S when \(k=1\): for \(k\ge 2\) the invariant foliation in \(\partial _\infty S\) provided by [62, Lemma 3.9] becomes a single leaf. The same reasoning also falls short to characterize the triangulable groups S that are O(u)-bilipschitz equivalent to \(X = {\mathbb {H}}_{{\mathbf {H}}}^2\), for it leaves the possibility that the Lie algebra of their shadow is
where \({\mathfrak {l}}_{4,3}\) denotes the 4-dimensional filiform algebra, \({\mathfrak {n}}_6\) is among \({\mathfrak {l}}_{6,8}\), \({\mathfrak {l}}_{6,22}(-1)\) and \({\mathfrak {l}}_{6,22}(0)\) (See [23] for structure constants), \({\mathfrak {n}}_7\) is one among the real forms of the 4 complex nilpotent algebras denoted \({\mathfrak {g}}_{7,3.12}\) (2 real forms), \({\mathfrak {g}}_{7,3.24}\), \({\mathfrak {g}}_{7,4.1}\) (2 real forms) or \({\mathfrak {g}}_{7,4.2}\) in [55]. Using [62] one can only deduce the pointed sphere conjecture (Lemma 5) for the first 6 out of these 14 Lie algebras, while it is expected that it holds for all but the last one.
4.2 Degenerations to \({\mathfrak {b}}(2, {\mathbf {C}})\)
We prove here a variant of Lauret’s theorem 10.
Lemma 6
Let \({\mathfrak {g}}\) be a completely solvable Lie algebra of dimension 4. The following are equivalent:
-
(6.1)
\({\mathfrak {g}}\) contracts to \({\mathfrak {b}}(2, {\mathbf {C}})\)
-
(6.2)
\({\mathfrak {g}} \longrightarrow _{\mathrm {deg}} {\mathfrak {b}}(2, {\mathbf {C}})\)
-
(6.3)
\({\mathfrak {g}}\) decomposes as \(\mathfrak [{\mathfrak {g}}, {\mathfrak {g}}] \oplus {\mathbf {R}} A\), where \([{\mathfrak {g}}, {\mathfrak {g}}] = \mathfrak {heis}\) and \({\text {ad}}_A\) is unipotent on \([{\mathfrak {g}}, {\mathfrak {g}}]/D^3 {\mathfrak {g}}\).
Proof
As in the proof of Theorem 10, the core of the proof is that (6.2) implies (6.3), so let us focus on this part. Assume that \({\mathfrak {g}} \longrightarrow _{\mathrm {deg}} {\mathfrak {b}}(2, {\mathbf {C}})\). Then \(b_1({\mathfrak {g}}) = 1\) by Lemma 4. The ideal \({\mathfrak {n}} = [{\mathfrak {g}}, {\mathfrak {g}}]\) is nilpotent by Lie’s theorem, and \({\mathfrak {g}} = {\mathfrak {n}} \rtimes _\beta {\mathbf {R}}\) for some nonsingular \(\beta \in {\text {ad}}({\mathfrak {n}})\). Without loss of generality we can assume that \({\text {Sp}}(\beta ) = \lbrace 1, 2 \rbrace \), and that 2 has multiplicity 1. So the nilpotency class of \({\mathfrak {n}}\) is at most 2, and \({\text {codim}} [{\mathfrak {n}}, {\mathfrak {n}}] = 1\); thus \({\mathfrak {n}}\) is either \({\mathbf {R}}^3\) or \(\mathfrak {heis}\), and \({\mathfrak {g}}\) is among the four algebras
where we recall that \({\mathfrak {s}}' = \mathfrak {heis}_{\alpha } \rtimes {\mathbf {R}}\) with \(\alpha = {\text {diag}}(J_2(1), 2)\) in the basis (X, Y, Z) and \({\mathfrak {s}}''\) is the Lie algebra of \(S''\) defined in Corollary 3. Observe that
Note that \({\mathfrak {s}}''\) degenerates to \({\mathfrak {b}}(3, {\mathbf {R}}) \; \sharp \; 2 {\mathfrak {b}}(2, {\mathbf {R}})\). Hence by Lemma 4, \(\dim H^1({\mathfrak {g}}, {\mathfrak {g}}) \ge 4\) for \({\mathfrak {g}} = {\mathfrak {b}}(3, {\mathbf {R}}) \; \sharp \; 2 {\mathfrak {b}}(2, {\mathbf {R}})\), which, again by Lemma 4, forbids a degeneration of the latter algebra to \({\mathfrak {b}}(2, {\mathbf {C}})\). This establishes (6.2) \(\implies \) (6.3). Finally let us prove that \({\mathfrak {s}}' \longrightarrow _{\mathrm {deg}} {\mathfrak {b}}(2, {\mathbf {C}})\). Take
Then \({\mathfrak {s}}'\) contractsFootnote 6 to \({\mathfrak {b}}(2, {\mathbf {C}})\) through \((\varphi _t)\). This establishes (6.3) \(\implies \) (6.1). \(\square \)
The author expects that Lemma 6 should hold replacing \({\mathfrak {b}}(2, {\mathbf {C}})\) with \({\mathfrak {b}}(n, {\mathbf {C}})\) and \(\mathfrak {heis}\) with \(\mathfrak {heis}^{2n-1}\) in (6.3), though generalizing Proposition 20 to higher dimensional algebras comprises some computational hurdles. The greatest theoretical difficulty in generalizing Theorem E (if it holds) from \({\mathbb {H}}_{{\mathbf {C}}}^2\) to \({\mathbb {H}}_{{\mathbf {C}}}^n\) with \(n>2\) seems to lie on the analytical side, cf. Remark 9 above.
5 Some remarks on spaces other than \({\mathbb {H}}^n_{{\mathbf {R}}}\) and \({\mathbb {H}}^n_{{\mathbf {C}}}\)
5.1 Connected Lie groups
In the attemps to relate the large-scale geometry of pairs of connected Lie groups, several sufficient criteria have been found (e.g. for quasiisometry in [6, 16], for sharing simply transitive Riemannian models in [74], and for O(u)-bilipschitz equivalence in [16]). These criteria consist for a large partFootnote 7 in going back to the Lie algebra and simplifying its structure. These criteria can sometimes be formulated using deformations and degenerations of Lie algebras.
-
Pansu’s theorem on asymptotic cones: those are degenerations.
-
Cornulier’s theorem on asymptotic cones: when the exponential radical is abelian, those are degenerations. (This is the case for the Heintze groups considered in Sect. 3.)
-
Twistings (or normal modifications) introduced by [45] and [32] and studied in relation to large-scale geometry in [74]: those are deformations.
5.1.1 Cornulier’s Theorem
A reference for the facts used in this section can be found in [4, Chapter VII]. Let \({\mathfrak {g}}\) be a completely solvable Lie algebra. Let \({\mathfrak {h}}\) be a Cartan subalgebra (maximal nilpotent self-normalizing in \({\mathfrak {g}}\)), and let \({\mathfrak {r}} = \liminf _i C^i {\mathfrak {g}}\) be the limit of the descending central series of \({\mathfrak {g}}\). Decompose the adjoint representation of \({\mathfrak {h}}\) in \({\mathfrak {r}}\) into primary components [4],
where \(\alpha \) is the structural morphism \({\mathfrak {h}} \rightarrow {\text {Der}}({\mathfrak {r}})\). Note that since \({\mathfrak {h}}\) is nilpotent, its ideal \({\mathfrak {w}} = {\mathfrak {h}} \cap {\mathfrak {r}}\) lies within \({\mathfrak {r}}^0\). So the semisimple part \(\delta \) of \(\alpha \) factors through \(\pi : {\mathfrak {h}} \rightarrow {\mathfrak {h}} / {\mathfrak {w}}\), and the resulting \({\mathfrak {h}}/{\mathfrak {w}}\)-module decomposes as
where \(\delta = {\underline{\delta }} \circ \pi \) and \( \omega = {\underline{\omega }} \circ \pi \). There is a Lie algebra homomorphism \({\underline{\delta }}_\infty : {\text {gr}}({\mathfrak {h}} /{\mathfrak {w}}) \rightarrow {\text {Der}}({\mathfrak {r}})\) and the following diagram:

Theorem 11
(Cornulier [16]) Let \({\mathfrak {g}}\) be a completely solvable Lie algebra. With notation as above, define \({\mathfrak {g}}_1 = {\mathfrak {r}} \rtimes _{{\underline{\delta }}} ({\mathfrak {h}} /{\mathfrak {w}})\) and \({\mathfrak {g}}_\infty \) as \({\mathfrak {r}} \rtimes _{{\underline{\delta }}_\infty } {\text {gr}}({\mathfrak {h}}/{\mathfrak {w}})\). Let G, \(G_1\), \(G_\infty \) be simply connected with Lie algebras \({\mathfrak {g}}\), \({\mathfrak {g}}_1\), \({\mathfrak {g}}_\infty \) respectively. Then
-
(a)
G and \(G_1\) are \(O(\log )\)-bilipschitz equivalent.
-
(b)
If \(C^{s+1} {\mathfrak {h}} = 0\), then \(G_1\) and \(G_\infty \) are \(O(r^{1-1/s})\)-bilispchitz equivalent.
Proposition 14
Let \({\mathfrak {g}}\) be a completely solvable Lie algebra. Assume that \({\mathfrak {r}} = \liminf C^i {\mathfrak {g}}\) is abelian. Let \({\mathfrak {g}}_1\), \({\mathfrak {g}}_\infty \) be as in Theorem 11. Then
We already encountered examples of this:
-
When \({\mathfrak {g}}\) is nilpotent, the right degeneration in (37) is Example 3. Note that \({\mathfrak {r}} = 0\) in this case.
-
When \({\mathfrak {g}} = [{\mathfrak {g}}, {\mathfrak {g}}] \oplus \mathbf{RA}\) and \({\text {ad}}_A\) is unipotent, the left degeneration in (37) is the contraction occuring in Theorem 10 (2). \({\mathfrak {r}}\) is abelian and has codimension 1 in this case.
Proof
Start with the decomposition (36). Decompose further \({\mathfrak {r}}\) into \({\mathfrak {r}}^0\) and a direct sum of subspaces \(U_i\) such that
Since \({\mathfrak {h}}\) is nilpotent, we have that \({\mathfrak {w}} = {\mathfrak {r}} \cap {\mathfrak {h}} \subseteq {\mathfrak {r}}^0\). Decompose \({\text {Vect}}({\mathfrak {g}})\) into a direct sum
where \({\mathcal {H}}\) is a linear subspace of \({\text {Vect}}({\mathfrak {g}})\) representing \({\mathfrak {h}}/{\mathfrak {w}}\). Denote by \(\mu \), resp. \(\mu _1\), resp. \(\mu _\infty \) the brackets of the three laws on \({\text {Vect}}({\mathfrak {g}})\). For \(t > 0\), set
Then for all \(h \in {\mathcal {H}}\) and \(u \in U_i \cap {\mathfrak {r}}^\omega \),
so \(\mu \) contracts to \(\mu _1\) through \(\varphi \). \(\square \)
Remark 10
We do not know whether Proposition 14 holds in general. This is because the contraction we used in the proof perturbs in general the brackets in \({\mathfrak {r}}\). We know no obstruction of the kind expressed in Lemma 4 for a degeneration from \({\mathfrak {g}}\) to \({\mathfrak {g}}_1\).
A question we would like to raise, in view of Remark 10 in particular, is whether the group \(R = \exp ({\mathfrak {r}})\) is a large-scale invariant (if the completely solvable G and \(G'\) are O(u)-equivalent, does it hold that \(\liminf C^i G \simeq \liminf C^i G'\)?). This appears quite difficult to determine in general, because this subgroup is exponentially distorted and gets totally disconnected in the asymptotic cones [60]. Nevertheless, it holds by Cornulier’s formula (conedim) and Theorem B that the dimension loss
is indeed a o(r)-bilipschitz invariant. When G is of Heintze type, the o(r)-bilipschitz invariance of (40) is materialized into the Gromov boundary; note also that the quasiisometry class of R is a quasiisometry invariant of G [47, Theorem A]; but we have no asymptotic invariant in general. We also note that the nonnegativity \({\text {asdim}}_{\mathrm {AN}}(X) - {\text {conedim}} X \ge 0\) holds more generally, a result of Dydak and Higes [25].
5.1.2 Shadows and deformations
Let \({\mathfrak {g}}_0\) be a completely solvable algebra. We call torus an abelian algebra of semisimple derivations of \({\mathfrak {g}}_0\). A torus \({\mathfrak {t}}\) is compactly embedded if every \(T \in {\mathfrak {t}}\) has purely imaginary spectrum. Maximal tori are conjugated.
Definition 13
(Special case of [32, 2.2]) Let \({\mathfrak {t}}\) be a maximal compactly embedded torus. A modificationFootnote 8 of \({\mathfrak {g}}_0\) is a Lie subalgebra \({\mathfrak {g}}\) of \({\mathfrak {g}}_0 \rtimes {\mathfrak {t}}\) that is transverse to \({\mathfrak {t}}\). We call \({\mathfrak {g}}_0\) the shadow of \({\mathfrak {g}}\).
The modification \({\mathfrak {g}}\) is the graph of a linear map \(\tau : {\mathfrak {g}}_0 \rightarrow {\mathfrak {t}}\), called the modification map: for \(X \in {\mathfrak {g}}_0\), \(\tau (X)\) is the only \(T \in {\mathfrak {t}}\) such that \(X+T \in {\mathfrak {g}}\). Note that \({\mathfrak {t}}\) being abelian, \([{\mathfrak {g}}, {\mathfrak {g}}] \subset {\mathfrak {g}}_0\).
Definition 14
Let \({\mathfrak {g}}\), \({\mathfrak {g}}_0\) and \(\tau \) be as above. We say that \({\mathfrak {g}}\) is a twisting (and \(\tau \) a twisting map) if in addition \([{\mathfrak {g}}, \tau ({\mathfrak {g}}_0)] \subseteq {\mathfrak {g}}\).
If \({\mathfrak {g}}_0\) is nilpotent, all its modifications are twistings [32].
Early works on modifications ([32, 45]) were concerned by the problem of finding adequate data for the classification of solvmanifolds. Modification have attracted the attention more recently because if \({\mathfrak {g}}\) is a modification of \({\mathfrak {g}}_0\), then G, \(G_0\) and \(G_0 \rtimes T\) (where T is the compact torus of \({\text {Aut}}(G_0)\) with Lie algebra \({\mathfrak {t}}\)) share a common Riemannian model, especially they are quasiisometric ([15, 74]).
Proposition 15
Let \({\mathfrak {g}}_0\), \({\mathfrak {t}}\), \({\mathfrak {g}}\) and \(\tau \) be as above. Assume that \({\mathfrak {g}}\) is a twisting. Define \(\omega _\tau (X \wedge Y) = [\tau (X), Y] + [X, \tau (Y)]\) for \(X, Y \in {\mathfrak {g}}_0\). Then,
-
(1)
\(\omega _\tau \in Z^2({\mathfrak {g}}_0, {\mathfrak {g}}_0)\), where \({\mathfrak {g}}_0\) acts in \({\mathfrak {g}}_0\) through the adjoint representation.
-
(2)
\([\omega _\tau ]\) is a linearly expandable infinitesimal deformation of \({\mathfrak {g}}_0\). The associated formal deformation goes through \(O_{{\mathfrak {g}}}\).
Proof
(1) By definition,
where we used the Jacobi identity in \({\mathfrak {g}}_0 \rtimes {\mathfrak {l}}\) three times. If \({\mathfrak {g}}\) is a twisting then \(\tau \) is a homomorphism [32], and since \({\mathfrak {t}}\) is abelian, the remaining terms all vanish.
(2) On the vector space \({\text {Vect}}({\mathfrak {g}}_0)\), let us denote by \(\mu _0\) the law of \({\mathfrak {g}}_0\) and put \(\lambda (t) = \mu _0 + \omega _\tau /t\). Let us check that \(\lambda (1) \in O_{\mathfrak {g}}\): for every \(X,Y \in {\mathfrak {g}}_0\),
where \(\pi _0\) denotes the projection onto \({\mathfrak {g}}_0\) parallel to \({\mathfrak {t}}\) (Remember that \({\mathfrak {t}}\) is abelian, hence \([ \tau (X), \tau (Y)] =0\)). Thus the law \(\lambda (1)\) is that of the Lie subalgebra \({\mathfrak {g}}\) in \({\mathfrak {g}}_0 \rtimes {\mathfrak {t}}\). \(\square \)
Beware that it is not true that a twisting \({\mathfrak {g}}\) degenerates to its shadow \({\mathfrak {g}}_0\). Here is a counterexample.
Example 4
(Solvable example) Let \({\mathfrak {g}}_0 = {\mathfrak {b}}(3, {\mathbf {R}})\), with basis \((X_1, X_2, T)\) and brackets
Let \((dx_1, dx_2, dt)\) be the dual basis. Then \(H^2({\mathfrak {g}}_0, {\mathfrak {g}}_0)\) is 3-dimensional, and contains the linearly independent classes \(\omega _1 = [dt \wedge dx_1 \otimes X_2]\) and \(\omega _2 = [dt \wedge dx_2 \otimes X_1]\). \(\omega _1\) and \(\omega _2\) are linearly expandable into degenerations, but \(\omega _1 - \omega _2\) is linearly expandable into a family of twistings that are not degenerations. See Appendix A.1 for a more general computation.
If \({\mathfrak {h}}\) is a graded Lie algebra and \(\mu \in O_{{\mathfrak {h}}}\), the groups \(H^2(\mathfrak \mu , \mu )\) are naturally graded. This is the case, for instance, if \({\mathfrak {h}}\) is a Carnot-graded group.

Sketch of \({\mathcal {N}}_6({\mathbf {R}}) \subseteq {\mathcal {L}}_6({\mathbf {R}})\) around the Carnot Lie algebra from Example 5, and some deformations
Example 5
(A nilpotent example) Let \(G_0\) be the simply connected 6-dimensional Lie group having Lie algebra with basis \(X_1, \ldots , X_6\) and the nonzero brackets
(This algebra is denoted \({\mathfrak {l}}_{6,7}\) in [23].) Note that \(X_6\) generates an abelian direct factor. \({\mathfrak {g}}_0\) is a Carnot-graded algebra under the grading
Let \((X^1, \ldots , X^6)\) be the dual basis, and denote by \(\mu \) the law. Consider the following cochains:
where we abbreviate \(X_k \otimes X^i \wedge X^j\) into \(X_k^{ij}\). These are cocycles but not coboundaries in \(H^2(\mu , \mu )\) (See the computations in Appendix A.2.1). The cohomology classes of \(\omega \), \(\xi _1\), \(\xi _2\) and \(\xi _3\) have weight \(-1\), 1, 2 and 1 respectively under the grading. The classes of \(\xi _1\), \(\xi _2\), \(\xi _3\) and \(\xi _1 + \xi _2\) linearly expand into formal deformations; the corresponding laws are \({\mathfrak {l}}_{6,6}\), \({\mathfrak {l}}_{6,12}\), \({\mathfrak {l}}_{6,13}\) and \({\mathfrak {l}}_{6,11}\) respectively in [23]. All these are also degenerations, entering into the description of Example 3 (adding cocycles with positive weights to the Lie algebra law does not change the lower central filtration). For every \(k \in {\mathbf {R}}\), the cohomology class of \(k \xi _1 + \omega \) is also integrable into a formal deformation, going through families of twistings of \({\mathfrak {g}}_0 = {\mathfrak {l}}_{6,7}\) if \(k=0\), or through families of twistings of \({\mathfrak {l}}_{6,6}\) if \(k \ne 0\) (Fig. 4).
One can check that all the simply connected solvable Lie groups that are O(u)-bilipschitz equivalent to \(G_0\) appear as deformations of \(G_0\) of the form described above. Let us give a few words on this. If H is such a group, then by [65] and [6], the shadow \({\mathfrak {h}}_0\) of its Lie algebra is isomorphic to \({\mathfrak {l}}_{6,i}\) with \(i \in \lbrace 6,7, 11, 12, 13 \rbrace \). The three last algebras are irreducible (they have no direct factor), and maximal tori for those are computed in [55]; in this way we check that only \({\mathfrak {l}}_{6,6}\) and \({\mathfrak {l}}_{6,7}\) possess derivations with purely imaginary spectra. Thus either \({\mathfrak {h}}\) is \({\mathfrak {l}}_{6,11}\), \({\mathfrak {l}}_{6,12}\), \({\mathfrak {l}}_{6,13}\) or a twisting of \({\mathfrak {l}}_{6,7}\) or \({\mathfrak {l}}_{6,6}\). Note that the quasiisometry classes in this family are not completely known, though it is expected that they are given by the isomorphism type of the shadow [75, Conjecture 19.114]. The real cohomology rings \(H^*({\mathfrak {l}}_{6,6}, {\mathbf {R}})\) and \(H^*({\mathfrak {l}}_{6,7}, {\mathbf {R}})\) are isomorphic [75, Sect. 19.6.6]. However, \(b_2({\mathfrak {l}}_{6,13})\) is 4 while it is 5 for all the others; and we can check that the rank of \(H^2({\mathfrak {l}}_{6,i}, {\mathbf {R}}) \odot H^2({\mathfrak {l}}_{6,i}, {\mathbf {R}}) \rightarrow H^4({\mathfrak {l}}_{6,i}, {\mathbf {R}})\) given by the cup product is 2 for \(i=6\) while it is 3 for \(i=11\) and \(i=12\) (see A.2.2 for some details). So none of the Lie groups \(L_{6,11}\), \(L_{6,12}\), \(L_{6,13}\) are quasiisometric to \(G_0\) by [67], or the recent [33, Corollary C].
It seems natural to expect Carnot graded algebra to have more twistings than their nilpotent deformations (on the other extreme, observe that characteristically nilpotent Lie algebras, which lie “deep down” in \({\mathcal {N}}_n({\mathbf {R}})\), have no twistings). This is indeed the situation on the previous example. Thus we ask:
Question 12
Let \({\mathfrak {h}}\) be a solvable Lie algebra over \({\mathbf {R}}\), H its associated simply connected Lie group, and let \(G_0\) be a simply connected Carnot-group. Assume that H and \(G_0\) are O(u)-bilipschitz. Is there a formal deformation of \({\mathfrak {g}}_0\) going through \({\mathfrak {h}}\)?
The author does not know whether the dimension of compactly embedded maximal tori is upper semicontinuous on \({\mathcal {N}}_n({\mathbf {R}})\) (which would hint towards a positive answer to Question 12). These tori embed linearly in \(H^1(\lambda , \lambda )\) whose dimension we have seen to be upper semicontinuous in Lemma 4. However the codimension of the tori may be high (see Table 3).
5.2 Higher-rank symmetric spaces
The real rank of a symmetric space X is o(r)-bilipschitz invariant, as it is the covering dimension of asymptotic cone [15] or, more in line with [48, Corollary 6.11], the minimal degree above which all relative homology group of subspaces in \({\text {Cone}}^\bullet _\omega X\) vanish. This can be refined: the restricted root system is invariant.
Proposition 16
(After Kleiner and Leeb) Let \(\phi : X \rightarrow Y\) be a sublinear bilipschitz equivalence between irreducible symmetric spaces X of rank \(\ge 2\). Then, the restricted root systems associated with X and Y are isomorphic.
Proof
The spherical Tits building at infinity in \({\text {Cone}}_\omega (X)\) has the same appartments as the Tits boundary of X [48, Theorem 5.2.1]. \(\square \)
We note that the rank p irreducible symmetric spaces of noncompact type
have same restricted root system \(BC_p\) and same asymptotic Assouad-Nagata dimension 4pq [22, Table V p. 518]. Thus, we could not distinguish them with our techniques, and Question 3 remains open so far for them.
The author is grateful to P. Pansu and G. Rousseau for bringing these pairs to his attention.
5.3 Right-angled Fuchsian buildings of uniform thickness
Given (p, q) such that \(p \ge 5\) and \(q \ge 2\), the finitely presented group
has a model \(I_{p,q}\) which is a \({\text {CAT}}(-1)\) cellular complex generalizing the cellular action of the hyperbolic Coxeter group \(\varGamma _{p,2}\) on \({\mathbb {H}}^2_{{\mathbf {R}}}\) tesselated by right-angled p-gons and, following [5],
The conformal dimension of \(I_{p,q}\) is not rational unless \(q=2\). It is proven in [62] that \({\text {Cdim}}_{O(u)} \partial _\infty I_{p,q} = {\text {Cdim}} \partial _\infty I_{p,q}\), so that it is a O(u)-bilipschitz invariant. Using Poincaré profiles, Hume, Mackay and Tessera proved that there can be no coarse embedding \(I_{p,q} \rightarrow I_{p', q'}\) when \({\text {Cdim}} \partial _\infty I_{p,q} > {\text {Cdim}} \partial _\infty I_{p',q'}\) [39, Theorem 13.2]. We found the equality case in (42) to be related to the following conjecture.
Conjecture 1
(Four exponential conjecture, [43, p.11]) Let \(\beta _1, \beta _2\) be complex numbers, linearly independent over \({\mathbf {Q}}\), and let \(z_1, z_2\) be complex numbers, also linearly independent over \({\mathbf {Q}}\). Then, at least one of the numbers \(e^{\beta _i z_j}\) is transcendental.
The analogous statement with two triples \(\beta _1, \beta _2, \beta _3, z_1, z_2, z_3\) is known as the six exponentials theorem [43]. The unconditional form of the following Proposition is stated as a conjecture in [41] and [54]. (We indicate with an asterisk that our statement is conditional.)
Proposition * 13
Assume that Conjecture 1 holds, and let \((p,q,p',q')\) be integers such that \(p,p' \ge 5\) and \(q, q' \ge 3\). Then the boundaries of the buildings \(I_{p,q}\) and \(I_{p', q'}\) have equal conformal dimension if and only if there exists positive integers M, N such that
where \(T_k\) is the Tchebychev polynomial of the first kind and degree k.
Proof
Negating the conclusion amounts asserting that there exists an irrational number z and a quadruple \((p,q,p',q')\) such that \(z \log (q'-1) = \log (q-1)\) and \(z {\text {argch}}((p-2)/2) = {\text {argch}}((p'-2)/2)\). Define \(\beta _1 = \log (q'-1)\),
\(z_1=1\) and \(z_2 = z\). Then, \(\beta _2/\beta _1\) is not rational. But \(e^{\beta _1}\), \(e^{z \beta _1} = q-1\), \(e^\beta _2\) and \(e^{z\beta _2} = \frac{p-2}{2} + \sqrt{p(p/4-1)}\) are all algebraic. \(\square \)
Note that the \(I_{p,q}\) are quasiisometrically rigid for \(q \ge 3\) [72]; especially they are classified up to quasiisometry by the pair (p, q) for \(q \ge 3\).
Proposition * 14
Assume that Conjecture 1 holds. If there exists a O(u)-bilipschitz equivalence \(\phi : I_{p,q} \rightarrow I_{p',q'}\) then (43) and (44) hold for some \(M,N \ge 1\).
Proof
This directly follows from Proposition 13 and [62]. \(\square \)
Let us finish with some questions. Though we consider (43) and (44) perhaps not sufficient for O(u)-equivalence between \(I_{p,q}\) and \(I_{p', q'}\), we could not distinguish them up to this relation. In a slightly different direction, one can ask:
Question 15
Assume that \(p,q,p', q'\) are as in (43) and (44). Are the groups \(\varGamma _{p,q}\) and \(\varGamma _{p',q'}\) (non)-measure equivalent? If yes, are they \(L^p\)-measure equivalent for some \(p < +\infty \)?
(We recall that a measure equivalence between the finitely generated \(\varGamma \) and \(\varLambda \) is given by a couple of free, commuting, measure preserving actions of \(\varGamma \) and \(\varLambda \) on a Lebesgue space \((\varOmega ,m)\) with Borel fundamental domains of finite measure X and Y, such that the associated cocycles \(c: G \times X \rightarrow H\) and \(H \times Y \rightarrow G\) have \(c(g, \cdot ) \in L^p\) for all g.)
Closer to the problems of this paper, the author also believe the following question to remain currently open, and of some interest in view of [39].
Question 16
Assume that \(p,q,p', q'\) are as in (43) and (44), and \(p \ne p'\). Is there a coarse embedding \(I_{p,q} \rightarrow I_{p',q'}\)?
Notes
Beware that the maximal solvable subgroups of \({\text {Isom}}(X)\) (which is a real Lie group) are not always completely solvable; they only have a co-compactly embedded such subgroup.
[21] has the assumption that \(G_\alpha \) and \(G_\beta \) are purely real, but the general proof goes along the same lines.
This was recorded by Burde and Steinhoff in their list of degenerations between 4-dimensional complex Lie algebras: \({\mathfrak {s}}' \otimes {\mathbf {C}}\) is \({\mathfrak {g}}(1/64, 5/16)\) in [7] and \({\mathfrak {s}}' \otimes {\mathbf {C}} \longrightarrow _{\mathrm {deg}} {\mathfrak {b}}(4, {\mathbf {R}}) \otimes {\mathbf {C}}\) is the case \(\gamma = 2\) in Table IV p. 736 op cit.
Additional subtelty comes from the “medium-scale” topology of the groups when it is non trivial.
Modification is a more general notion, we only consider modifications of completely solvable Lie algebras for our purposes in the present paper.
References
Ancochea, José M., Campoamor, Rutwig: Characteristically nilpotent Lie algebras: a survey. Extracta Math. 16(2), 153–210 (2001)
Armand Borel. Sous-groupes compacts maximaux des groupes de Lie. In Séminaire Bourbaki, Vol. 1, pages Exp. No. 33, 271–279. Soc. Math. France, Paris, 1995
Bonk, Mario, Kleiner, Bruce: Conformal dimension and Gromov hyperbolic groups with 2-sphere boundary. Geom. Topol. 9, 219–246 (2005)
Bourbaki, N.: Éléments de mathématique. Fasc. XXXVIII: Groupes et algèbres de Lie. Chapitre VII: Sous-algèbres de Cartan, éléments réguliers. Chapitre VIII: Algèbres de Lie semi-simples déployées. Actualités Scientifiques et Industrielles, No. 1364. Hermann, Paris, 1975
Bourdon, Marc: Immeubles hyperboliques, dimension conforme et rigidité de Mostow. Geom. Funct. Anal. 7(2), 245–268 (1997)
Breuillard, Emmanuel: Geometry of locally compact groups of polynomial growth and shape of large balls. Groups Geom. Dyn. 8(3), 669–732 (2014)
Burde, Dietrich, Steinhoff, Christine: Classification of orbit closures of 4-dimensional complex Lie algebras. J. Algebra 214(2), 729–739 (1999)
Cantrell, Michael, Furman, Alex: Asymptotic shapes for ergodic families of metrics on nilpotent groups. Groups Geom. Dyn. 11(4), 1307–1345 (2017)
Caprace, Pierre-Emmanuel., Cornulier, Yves, Monod, Nicolas, Tessera, Romain: Amenable hyperbolic groups. J. Eur. Math. Soc. (JEMS) 17(11), 2903–2947 (2015)
Carrasco Piaggio, Matias, Sequeira, Emiliano: On quasi-isometry invariants associated to a Heintze group. Geom. Dedicata. 189, 1–16 (2017)
Casson, Andrew, Jungreis, Douglas: Convergence groups and Seifert fibered \(3\)-manifolds. Invent. Math. 118(3), 441–456 (1994)
Cencelj, Matija, Dydak, Jerzy, Smrekar, Jaka, Vavpetič, Aleš: Sublinear Higson corona and Lipschitz extensions. Houston J. Math. 37(4), 1307–1322 (2011)
Chevalley, Claude, Eilenberg, Samuel: Cohomology theory of Lie groups and Lie algebras. Trans. Amer. Math. Soc. 63, 85–124 (1948)
Cornelia Druţu and Michael Kapovich. Geometric group theory, volume 63 of American Mathematical Society Colloquium Publications. American Mathematical Society, Providence, RI, 2018. With an appendix by Bogdan Nica
Cornulier, Yves: Dimension of asymptotic cones of Lie groups. J. Topol. 1(2), 342–361 (2008)
Cornulier, Yves: Asymptotic cones of Lie groups and cone equivalences. Illinois J. Math. 55(1), 237–259 (2011)
Cornulier, Yves: Commability and focal locally compact groups. Indiana Univ. Math. J. 64(1), 115–150 (2015)
Cornulier, Yves: Gradings on Lie algebras, systolic growth, and cohopfian properties of nilpotent groups. Bull. Soc. Math. France 144(4), 693–744 (2016)
Cornulier, Yves: On sublinear bilipschitz equivalence of groups. Ann. Sci. Éc. Norm. Supér. (4) 52(5), 1201–1242 (2019)
Cornulier, Yves, Tessera, Romain: Contracting automorphisms and \(L^p\)-cohomology in degree one. Ark. Mat. 49(2), 295–324 (2011)
David Fisher and Thang Nguyen. Quasi-isometric embeddings of non-uniform lattices. arXiv preprint arXiv:1512.07285, 2015
David Hume, John M. Mackay, and Romain Tessera. Poincaré profiles of groups and spaces. Rev. Mat. Iberoam., 36(6):1835–1886, 2020
de Graaf, Willem A.: Classification of 6-dimensional nilpotent Lie algebras over fields of characteristic not 2. J. Algebra 309(2), 640–653 (2007)
Dranishnikov, Alexander. N., Smith, Justin: On asymptotic Assouad-Nagata dimension. Topology Appl. 154(4), 934–952 (2007)
Dydak, Jerzy, Higes, Jose: Asymptotic cones and Assouad-Nagata dimension. Proc. Amer. Math. Soc. 136(6), 2225–2233 (2008)
Eberlein, Patrick, Heber, Jens: Quarter pinched homogeneous spaces of negative curvature. Internat. J. Math. 7(4), 441–500 (1996)
Ernst Heintze. On homogeneous manifolds of negative curvature. Math. Ann., 211:23–34, 1974
Fisher, David, Whyte, Kevin: Quasi-isometric embeddings of symmetric spaces. Geom. Topol. 22(5), 3049–3082 (2018)
Fukaya, Tomohiro: Sublinear Higson corona of Euclidean cone. Tsukuba J. Math. 36(1), 67–77 (2012)
Gabai, David: Convergence groups are Fuchsian groups. Ann. of Math. (2) 136(3), 447–510 (1992)
Gabriel Pallier. Sublinear quasiconformality and the large-scale geometry of Heintze groups. Conform. Geom. Dyn., 24:131–163, 2020
Gordon, Carolyn S., Wilson, Edward N.: Isometry groups of Riemannian solvmanifolds. Trans. Amer. Math. Soc. 307(1), 245–269 (1988)
Gotfredsen, Thomas, Kyed, David: Cohomological induction and uniform measure equivalence. Fund. Math. 255(1), 19–49 (2021)
Grigory A. Margulis. The isometry of closed manifolds of constant negative curvature with the same fundamental group. Dokl. Akad. Nauk SSSR, 192:736–737, 1970
Gromov, Mikhael L., Thurston, William P.: Pinching constants for hyperbolic manifolds. Invent. Math. 89(1), 1–12 (1987)
Grothendieck, Alexander: Éléments de géométrie algébrique. III. Étude cohomologique des faisceaux cohérents. I. Inst. Hautes Études Sci. Publ. Math. 11, 5–167 (1961)
Heintze, Ernst: On homogeneous manifolds of negative curvature. Math. Ann. 211, 23–34 (1974)
Higes, Jose, Peng, Irine: Assouad-Nagata dimension of connected Lie groups. Math. Z. 273(1–2), 283–302 (2013)
Hume, David, Mackay, John M., Tessera, Romain: Poincaré profiles of groups and spaces. Rev. Mat. Iberoam. 36(6), 1835–1886 (2020)
Jacobson, Nathan: A note on automorphisms and derivations of Lie algebras. Proc. Amer. Math. Soc. 6, 281–283 (1955)
Jeremy T. Tyson. Geometric and analytic applications of a generalized definition of the conformal modulus. ProQuest LLC, Ann Arbor, MI, 1999. Thesis (Ph.D.)–University of Michigan
John Roe. Lectures on coarse geometry, volume 31 of University Lecture Series. American Mathematical Society, Providence, RI, 2003
Jorge Lauret. Degenerations of Lie algebras and geometry of Lie groups. Differential Geom. Appl., 18(2):177–194, 2003
Jose Higes and Irine Peng. Assouad-Nagata dimension of connected Lie groups. Math. Z., 273(1-2):283–302, 2013
José M. Ancochea and Rutwig Campoamor. Characteristically nilpotent Lie algebras: a survey. Extracta Math., 16(2):153–210, 2001
Keesling, James: The one-dimensional Čech cohomology of the Higson compactification and its corona. Topology Proc. 19, 129–148 (1994)
Kivioja, Ville, Le Donne, Enrico, Golo, Sebastiano Nicolussi: Metric equivalences of Heintze groups and applications to classifications in low dimension. Ill. J. Math. 66, 91–121 (2021)
Kleiner, Bruce, Leeb, Bernhard: Rigidity of quasi-isometries for symmetric spaces and Euclidean buildings. Inst. Hautes Études Sci. Publ. Math. 86, 115–197 (1997)
Kobayashi, Shoshichi: Homogeneous Riemannian manifolds of negative curvature. Tôhoku Math. J. 2(14), 413–415 (1962)
Kramer, Linus, Shelah, Saharon, Tent, Katrin, Thomas, Simon: Asymptotic cones of finitely presented groups. Adv. Math. 193(1), 142–173 (2005)
Lauret, Jorge: Degenerations of Lie algebras and geometry of Lie groups. Differential Geom. Appl. 18(2), 177–194 (2003)
Lazard, Daniel: Autour de la platitude. Bull. Soc. Math. France 97, 81–128 (1969)
Linus Kramer and Richard M. Weiss. Coarse equivalences of Euclidean buildings. Adv. Math., 253:1–49, 2014. With an appendix by Jeroen Schillewaert and Koen Struyve
Louis Magnin. Adjoint and trivial cohomologies of nilpotent complex Lie algebras of dimension \(\le 7\). Int. J. Math. Math. Sci., pages Art. ID 805305, 12, 2008
Magnin, Louis: Adjoint and Trivial Cohomology Tables for Indecomposable Nilpotent Lie Algebras of Dimension less than 7 Over \({\mathbf{C} }\), Second corrected edition Université de Bourgogne, Laboratoire de physique-mathématique (2007)
Margulis, Grigory A.: The isometry of closed manifolds of constant negative curvature with the same fundamental group. Dokl. Akad. Nauk SSSR 192, 736–737 (1970)
Michael G. Cowling, Ville Kivioja, Enrico Le Donne, Sebastiano Nicolussi Golo, and Alessandro Ottazzi. From homogeneous metric spaces to lie groups, 2021
Mikhael L. Gromov and William P. Thurston. Pinching constants for hyperbolic manifolds. Invent. Math., 89(1):1–12, 1987
Mikhael L. Gromov. Asymptotic invariants of infinite groups. In Geometric group theory, Vol. 2 (Sussex, 1991), volume 182 of London Math. Soc. Lecture Note Ser., pages 1–295. Cambridge Univ. Press, Cambridge, 1993
Mikhael L. Gromov. Infinite groups as geometric objects. In Proceedings of the International Congress of Mathematicians, Vol. 1, 2 (Warsaw, 1983), pages 385–392. PWN, Warsaw, 1984
Nijenhuis, Albert, Richardson, Roger W., Jr.: Deformations of Lie algebra structures. J. Math. Mech. 17, 89–105 (1967)
Pallier, Gabriel: Sublinear quasiconformality and the large-scale geometry of Heintze groups. Conform. Geom. Dyn. 24, 131–163 (2020)
Pansu, Pierre: Croissance des boules et des géodésiques fermées dans les nilvariétés. Ergodic Theory Dynam. Systems 3(3), 415–445 (1983)
Pansu, Pierre: Dimension conforme et sphère à l’infini des variétés à courbure négative. Ann. Acad. Sci. Fenn. Ser. A I Math. 14(2), 177–212 (1989)
Pansu, Pierre: Métriques de Carnot-Carathéodory et quasiisométries des espaces symétriques de rang un. Ann. of Math. (2) 129(1), 1–60 (1989)
Roe, John: Lectures on coarse geometry. University Lecture Series, vol. 31. American Mathematical Society, Providence, RI (2003)
Sauer, R.: Homological invariants and quasi-isometry. Geom. Funct. Anal. 16(2), 476–515 (2006)
Thomas, Simon, Velickovic, Boban: Asymptotic cones of finitely generated groups. Bull. London Math. Soc. 32(2), 203–208 (2000)
Tomohiro Fukaya. Sublinear Higson corona of Euclidean cone. Tsukuba J. Math., 36(1):67–77, 2012
Tukia, Pekka: On quasiconformal groups. J. Analyse Math. 46, 318–346 (1986)
Wright, Nick: \(C_0\) coarse geometry and scalar curvature. J. Funct. Anal. 197(2), 469–488 (2003)
Xie, Xiangdong: Quasi-isometric rigidity of Fuchsian buildings. Topology 45(1), 101–169 (2006)
Xie, Xiangdong: Large scale geometry of negatively curved \(\mathbb{R} ^n\rtimes \mathbb{R} \). Geom. Topol. 18(2), 831–872 (2014)
Yves Cornulier and Romain Tessera. Contracting automorphisms and \(L^p\)-cohomology in degree one. Ark. Mat., 49(2):295–324, 2011
Yves Cornulier. Dimension of asymptotic cones of Lie groups. J. Topol., 1(2):342–361, 2008
Acknowledgements
The author thanks Salim Tayou for a useful discussion, Tomohiro Fukaya for useful comments on a draft of this paper, and especially the anonymous referee for many comments and corrections.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Author supported by the European Research Council, ERC Starting Grant 713998 GeoMeG “Geometry of Metric Groups”.
Methods used for the cohomology computations
Methods used for the cohomology computations
The cohomology groups used in this paper are obtained by direct methods (i.e. by somewhat explicit computations of derivative, cocycles and coboundaries). We summarize them below.
1.1 Solvable Lie algebras
Let \({\mathfrak {b}}(n, {\mathbf {K}})\) be defined as in Example 1, with coordinates \((z_\alpha , \tau ,s)\). Decompose \(z_\alpha = x_\alpha + iy_\alpha \); for \(1 \le \alpha _1< \cdots < \alpha _s \le n-1\) and \(1 \le \beta \le n-1\), denote
We apply the summation convention where we simplify \(\sum _\mu X^{\alpha \mu }_\alpha \) into \(X^{\alpha \mu }_\alpha \) in any equality between tensors whenever \(\mu \) is unbound in the RHS.
The Lie algebra grading \({\mathfrak {s}}_0 = \langle S \rangle \), \({\mathfrak {s}}_1 = \langle X_\alpha , Y_\alpha \rangle \) and \({\mathfrak {s}}_2 =\langle T \rangle \) extends to a grading of the mixed exterior/tensor product so that, say, \(X^{\alpha _1, \ldots \alpha _s}_{\beta } \wedge T\) has weight \( 1 -s + 2\). The differentials have degree 0, hence the cohomology groups are graded accordingly. Finally, \({\mathfrak {b}}(n , {\mathbf {C}})\) has a preferred complex structure, \(JX_\alpha = Y_\alpha \), \(JY\alpha = -X_\alpha \) and \(JS= T\). This is because \({\mathbf {H}}^n_{{\mathbf {C}}}\) is Hermitian. J is not an automorphism; nevertheless,
is an automorphism, and we will use it in order to simplify the computations.
1.1.1 Results
Proposition 17
\(H^1({\mathfrak {b}}(n, {\mathbf {R}}), {\mathfrak {b}}(n, {\mathbf {R}})) = \bigoplus _{(\alpha , \beta ) \ne (n-1, n-1)} \langle X_\alpha ^\beta \rangle \).
Proposition 18
\(H^2({\mathfrak {b}}(n, {\mathbf {R}}), {\mathfrak {b}}(n, {\mathbf {R}})) = \bigoplus _{(\alpha , \beta ) \ne (n-1, n-1)} \langle [X_\alpha \otimes S^*\wedge X^\beta ] _{\alpha \ne \beta } \rangle \).
Since the computation of \(H^1({\mathfrak {b}}(n, {\mathbf {C}}), {\mathfrak {b}}(n,{\mathbf {C}}))\) proves useful for Proposition 17 and is not significantly harder than the case \(n=2\) used in Sect. 4, we provide the result for all n and the weight decomposition below.
Proposition 19
\(\dim H^1 ({\mathfrak {b}}(n, {\mathbf {C}}), {\mathfrak {b}}(n, {\mathbf {C}})) = (n-1)^2 + 1\) and
Proposition 20
Let \({\mathfrak {s}}''\) be the four-dimensional Lie algebra \({\mathbf {R}}^3 \rtimes _{\alpha } {\mathbf {R}}\), where \(\alpha = {\text {diag}}(J_2(1), 2)\). Then \(\dim H^1({\mathfrak {s}}'', {\mathfrak {s}}'') = 4\).
1.1.2 Method
In order to gain space for Propositions 17 to 19 we gather the computation for \({\mathbf {R}}\) and \({\mathbf {C}}\) and then extract the case of \({\mathbf {K}} = {\mathbf {R}}\). We abbreviate the derivative of the complex \(C^\bullet ({\mathfrak {b}}(n, {\mathbf {K}}), {\mathfrak {b}}(n, {\mathbf {K}}))\) into \(d'_{{\mathbf {K}}}\).
Lemma 7
For all \(\alpha , \beta \) such that \(1 \le \alpha , \beta \le n-1\),
Proof
The whole computation being of little interest, let us explain in detail only how one computes \(d_{{\mathbf {C}}} X_\alpha ^\beta \), \(d_{{\mathbf {C}}} Y_\alpha ^\beta \) and \(d(X_\alpha \otimes S^*)\) as a sample of the techniques employed. Applying (30),
which yields the expression of \(d_{{\mathbf {C}}} X_\alpha ^\beta \). Applying \({{\widetilde{J}}}\) produces \(d_{{\mathbf {C}}} Y_\alpha ^\beta \):
Now for \(d'_{{\mathbf {C}}}(X_\alpha \otimes S^*) (X_\mu \wedge S)\), using the observation that \(\ker S^*= {\mathfrak {s}}_1 \oplus s_2 =[{\mathfrak {s}}, {\mathfrak {s}}]\), we can reduce the number of terms needed for the computations of \(d(X_\alpha \otimes S^*)\): this will evaluate to zero for any bivector where S is not a factor. The remaining terms are:
\(\square \)
Lemma 8
For all \(\alpha , \beta \) such that \(1 \le \alpha , \beta \le n-1\),
Proof
Discard the terms with Y, S, T in the results of Lemma 7. \(\square \)
Lemma 9
(Differentials of 2-cochains)
Proof
Let us concentrate on \(d'_{\mathbf {R}}(X_\alpha ^{\beta \gamma })\). First recall that if \({\mathfrak {g}}\) is a Lie algebra and \(\omega \) is a \({\mathfrak {g}}\)-valued 2-form, then for every \(U, V, W \in {\mathfrak {g}}^3\),
Applying this, one checks readily that \(d'_{\mathbf {R}}(X_\alpha ^{\beta \gamma }) (X_{\mu \nu \ell })= 0\) while
\(\square \)
Remark 11
The Lie algebra-valued forms have a wedge product. However we did not find a clear computational advantage in using formulae for the derivative of 2-forms using this wedge product.
Proof
(Proof of Proposition 17) By Lemma 8,
while \(d'_{{\mathbf {R}}}X_\alpha = X_\alpha \otimes S^*\) and \(d'_{{\mathbf {R}}}S = - X_\mu ^\mu \). \(\square \)
Proof
(Proof of Proposition 18) By Lemma 8,
while by Lemma 9,
\(\square \)
Proof
(Proof of Proposition 19) The 1-coboundaries are computed as
The right-hand side of equations in Lemma 7 provide the 1-cocycles. \(\square \)
Proof
(Proof of Proposition 20) We recall that \({\mathfrak {s}}''\) is the Lie algebra over \(X_1, \ldots ,X_4\) with \({\mathfrak {s}}'' = \langle X_2, X_3, X_4 \rangle \oplus \langle X_4 \rangle \) and
in the basis \((X_2, X_3, X_4)\).
Omitting the symbol \(\sum _{i<j}\) and using \(d'(X_k^\ell )(x^{ij} X_{ij}) = - x^{ij} X_k^\ell [X_i, X_j] + \delta _{j\ell } x^{ij} [X_i, X_{k}] - \delta _{i\ell } x^{ij} [X_j, X_k]\) one finds
All the nonzero co-boundaries obtained are linearly independent, hence
\(\square \)
1.2 The Lie algebra \({\mathfrak {l}}_{6,7}\) and its nilpotent deformations
We expand below on the computations needed for Example 5.
1.2.1 Adjoint cohomology of \({\mathfrak {l}}_{6,7}\)
One computes the 2-coboundaries as:
This justify the assertion that \(\omega \), \(\xi _1\), \(\xi _2\), \(\xi _3\) and \(\xi _1 + \xi _2\) are not coboundaries. We now check that they are cocycles. In the computation below, we omit the symbols \(\sum _{i<j<k}\), and get rid of the terms that can be checked to equal 0 by direct inspection.
Note that \(\dim H^2(\mu , \mu ) = 18\), by the computer-produced [34, Table 11].
1.2.2 Cohomology rings
Let \(d_i\) denote the derivative of \(C^*({\mathfrak {l}}_{6,i}, {\mathbf {R}})\). Then
In the notation of [55], \({\mathfrak {l}}_{6,11} \otimes {\mathbf {C}}\) is \({\mathfrak {g}}_{6,12}\) while \({\mathfrak {l}}_{6,12} \otimes {\mathbf {C}}\) is \({\mathfrak {g}}_{6,11}\). We compute that
The computations for \({\mathfrak {l}}_{6,11}\) and \({\mathfrak {l}}_{6,12}\) can be checked with the help of the derivative \(d_i\) written down with computer assistance in [55] on p.44 and p.72 respectively ([55] uses the \({\mathfrak {g}}_{6,i}\) notation recalled above for the Lie algebras and writes \(\omega ^{i,j}\) for \(X^{ij}\)). Moreover,
If \(\pi _i\) denotes the cup product \(H^2({\mathfrak {l}}_{6,i}, {\mathbf {R}}) \times H^2({\mathfrak {l}}_{6,i}, {\mathbf {R}}) \rightarrow H^4({\mathfrak {l}}_{6,i}, {\mathbf {R}})\), then
One checks using the co-boundaries spaces \(B^4\) listed above that these vectors are linearly independent, completing the proof that the cohomology rings of \({\mathfrak {l}}_{6,11}\) and \({\mathfrak {l}}_{6,12}\) are not isomorphic to that of \({\mathfrak {l}}_{6,7}\).
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Pallier, G. On the logarithmic coarse structures of Lie groups and hyperbolic spaces. Geom Dedicata 216, 56 (2022). https://doi.org/10.1007/s10711-022-00714-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10711-022-00714-6
Keywords
- Quasiisometry
- Coarse geometry
- Lie algebra cohomology
- Left-invariant metrics on Lie groups
- Rigidity
- Pinching
- Higson corona
- Fuchsian building