
Abstract
This article presents a risk-based method for building fire safety design. Because the design fire is the most critical aspect of a building fire safety design, this article uses reliability theory to derive design fires from the fire risk acceptance criteria. The fire scenarios are modeled by an event tree, where different fire protection systems are presented as pivotal events. The number of casualties is estimated by the occupant number and the probability that an untenable condition is reached before occupants evacuate to a safe location. Using the probability and consequence of each fire scenario, the expected risk to life is used to integrate the fire risk acceptance criteria into the determination of the target reliability index. A global optimization method is then applied to the reliability index to obtain the design fires for each scenario. A case study was conducted to demonstrate an application of this proposed method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
A large number of buildings are currently under construction in developing countries such as China. Many of these new buildings are characterized as high-rise or large-scale structures and have unique exteriors. Due to the large size of these buildings and their large number of occupants, people may have difficulty evacuating and may be injured or killed as a result once a fire occurs. Many large fires that have resulted in high death tolls have recently occurred [1]. For example, in 2008, a fire claimed 44 lives and resulted in another 88 injuries in Shenzhen, China. One of the most important requirements for fire safety implementation is safe evacuation from the building and the minimization of the fire risk to life to an acceptable level [2]. A reasonable fire safety design is an essential measure toward achieving this goal. Traditionally, the prescriptive approach was dominant in fire safety design. As building complexity has increased, the design results derived from prescriptive design proves insufficient in meeting building fire safety requirements. Performance-based fire safety design (P-B FSD), an alternative to prescriptive fire safety design, is now increasingly employed for high-rise buildings.
In P-B FSDs, design fires are used to characterize the fire growth and fire hazards. The selection of suitable design fires is central to the application of P-B FSDs. Because the prediction of fire growth in a building is difficult due to the uncertainties in determining the type, quantity and arrangement of combustibles [3], the design fires in P-B FSDs are usually prescribed by the fire safety engineers. There are even recommendations of the prescribed values in some codes. As a result, this prescription ignores these uncertainties and heavily depends on the fire safety engineers’ judgement or the recommendation from the codes. Such a prescription is hard to validate, and the design results may vary from engineer to engineer. In addition, due to the ignorance of the uncertainties associated with the selection of the design fire, the concept of fire risk is still not incorporated into P-B FSDs.
A significant amount of effort has been put into quantifying uncertainties related to the prescription of design fires and incorporating fire risk into P-B FSDs since the early stages of P-B FSDs. To quantify the effect of uncertainties on the P-B FSD results, Magnusson et al. [4] considered the uncertain parameters in fire dynamics and evacuation and employed the limit state function to determine the failure probability of occupant evacuation from a building fire. Kong et al. [5] employed a Monte Carlo simulation to analyze the effects of uncertain heat release rates on the available safe egress time (ASET). To incorporate fire risk into P-B FSDs, many researchers have proposed various fire risk assessment methods. He et al. [6] proposed a probabilistic risk assessment method to estimate the expected risk to life (ERL). Chu et al. [7] refined this method by considering additional stochastic factors. With the refined method, a comprehensive quantitative fire risk assessment framework was established. In this framework, the variation of the fire scenario probability is quantified by a Markov chain [8]. Bayesian networks [9, 10] and non-probabilistic methods such as fuzzy sets [11] were also employed to estimate the fire risk to life safety. Many fire risk assessment models have been developed to calculate the ERL to support P-B FSDs, such as CESARE-risk [12], FiRECAM™ [13], and CRISP [14].
Although fire risk assessment methods have been discussed by many researchers, they have yet to be widely applied in real-world P-B FSDs, partly because the concept of accepting a certain number of casualties as a risk may not fit comfortably in the expression of a law and also because the acceptable level of risk is seldom clarified [15] as well as the time and cost necessary for performing the risk assessment. Therefore, current P-B FSDs cannot tell the fire safety engineer how large the design fire should be for an acceptable fire risk level. To solve this problem, a risk-based method is proposed in this article to derive design fires corresponding to an acceptable fire risk level. Because the definition of risk is different from one field to another, the concept of fire risk is discussed first. For the definition of the fire risk, the fire scenarios, which are one of the important components of fire risk, are generated using the event tree method while considering the reliability of the fire protection systems. Next, to evaluate the consequence of the fire, the reliability theory of the safe evacuation of occupants from building fires is presented. The derivation of the design fires based on the acceptable fire risk level is then described. A case study is also performed to demonstrate the proposed method.
2 The Concept of Fire Risk
2.1 The Definition of Fire Risk
A substantial amount of effort has been put into defining risk by the society of risk analysis [16]. However, there are still no generally accepted definitions of risk [17]. The definition of risk may differ from one field to another. For example, engineers may consider risk as a numerical value that is a function of probabilities and consequences [18], whereas sociologists regard risk as a social product [19].
In this paper, the quantitative definition of risk proposed by Kaplan and Garrick [20] is used. They defined “risk” using three questions: “What may happen?”, “How likely is it to happen?” and “What will be the consequences if it happens?” Accordingly, three factors are considered as the components of risk, the scenario, probability and the consequences of the scenario, and the risk is considered as a triplet, which is expressed as follows:
where S i is the scenario i, P i is the probability of scenario i and C i is the consequence of scenario i.
Based on the definition given by Kaplan and Garrick, the fire risk is defined based on the fire scenarios and is represented as follows [21]:
where g(m’) is a function that transforms the severity measure m’ into a measure of fire risk analysis interest. For example, let m’ be defined as the number of fatalities in a fire, and let the measure of interest be the number of deaths. Then, g(m’) = m’. P(m=m’) is the probability that the measure m’ will occur.
In general, fire risk is assessed using a finite set of fire scenarios. Hence, Eq. (2) may be re-written as follows:
where N s is the number of fire scenarios, R i is the risk of fire scenario i and g(m i ) is the consequence of fire scenario i. If the consequence of interest is lives lost due to fire, g(m i ) would be the number of casualties in fire scenario i. P(m=m i ) is the occurrence probability of fire scenario i. The fire risk to life may be calculated as follows:
where C i is the number of casualties for fire scenario i and P i is the probability of occurrence of fire scenario i. It may be observed from Eq. (4) that there are three key factors in the quantification of fire risk, i.e., the fire scenario, the consequence and the occurrence probability of the fire scenario.
2.2 Fire Scenarios Generated by an Event Tree
Fire scenarios are a key feature of the definition of the fire risk. Designing appropriate fire scenarios is essential to the fire risk analysis and the P-B FSD. The traditional way of designing fire scenarios, i.e., “credible worst scenario”, is actually difficult to apply in practical engineering situations due to the difficulty in selecting a “credible worst scenario” agreed upon by all stakeholders. In practical P-B FSDs, fire safety engineers are usually most concerned with how to specify appropriate fires in the following fire scenarios:
-
(1)
All the fire protection systems work well.
-
(2)
One or some of the fire protection systems, such as the sprinklers and smoke exhaust systems, fail to work well.
-
(3)
All the fire protection systems fail to work well.
To consider the variety of fire scenarios that may arise, depending on if the fire protection systems function as expected, the event tree method with consideration of the fire protection system’s reliability is employed. Here, two types of fire protection systems are considered as a simplified demonstration: the sprinkler and smoke detection systems. The fire scenarios generated by the event tree are presented in Fig. 1.

Fire scenarios generated by event tree
Each branch of the event tree represents one possible fire scenario. At each branch point, different alternatives may occur with a certain probability. For example, for the situation in which a fire has occurred, the smoke detector will either function successfully or fail. Success and failure are two alternatives. These alternatives at the branch point affect the subsequent parts of the tree. Each branch outcome is evidence of the chain of events leading to the final event.
2.3 The Probability and the Consequence for Each Fire Scenario
Because the fire scenario has been generated by the event tree method as described in Sect. 2.2, the occurrence probability of each fire scenario may be easily estimated as the product of the probability of each node based on the event tree.
The consequence of each fire scenario may be any concerned variable, such as property loss, casualties or environmental effects. Because ensuring people’s safety is usually the objective in P-B FSD, only the number of casualties is considered here. Casualties associated with fires are the result of events occurring in a certain sequence. In P-B FSD, the safety levels of occupants are usually determined by comparing two times: the time elapsed until the fire develops to an untenable condition, namely, the ASET, and the time elapsed until occupants evacuate to a safe location, namely, the required safe egress time (RSET). If the ASET is larger than the RSET, an untenable condition will be reached after the occupants evacuate to safe locations, and casualties will not occur, as shown in Fig. 2. The margin where the ASET is larger than the RSET is a safety margin and is defined as follows:
where t A is the ASET (in s) and t R is the RSET (in s).

The traditional deterministic timeline of estimating the casualties in building fires
This method ignores the uncertainties of the ASET and the RSET and considers both of them as deterministic. Due to the complexity of the fire dynamics and the evacuation process, uncertainties are inevitably associated with the ASET and the RSET. For example, the heat release rate, one of input parameters for the calculation of the ASET, may vary due to the various fire loads. If uncertainties in the ASET and the RSET are considered, the ASET and the RSET should be stochastic and may be characterized by certain probabilistic distributions, as shown in Fig. 3. In this case, the safety margin in Fig. 2 is also uncertain. The probability that the ASET is less than the RSET is defined as the failure probability

The schematic of the distributions of ASET and RSET
The number of casualties in scenario i may then be determined as follows [6]:
where N p is the number of occupants in the room and P i , f is the failure probability for scenario i. Because the number of occupants in the room can be calculated by the product of the occupant density and the room area, the main task is to determine the failure probability to enable the calculation of the number of casualties.
3 Determination of the Failure Probability Using Reliability Theory
To quantify the number of casualties for each fire scenario, the failure probability has to be determined. The derivation of the failure probability using reliability theory will be presented in this section.
3.1 The Calculation of the Failure Probability
A failure occurs when the safety margin is less than 0, i.e., the ASET is less than the RSET. Considering the safety margin G as a function of t A and t R , the failure probability can be characterized by a joint probability distribution function
As stated above, the RSET mostly consists of the evacuation time or the pre-evacuation time, which depends on the occupant behavior. Clearly, the evacuation from a fire is influenced by the fire. However, the ASET is less dependent on the evacuation process than on the fire dynamics, such as the ignition, fire load, fire growth and the materials in the building. Therefore, these two variables are assumed to be independent. Based on this assumption, the failure probability may be estimated from the area where the distributions of the ASET and the RSET overlap, as shown in Fig. 3. The failure probability may be estimated by the following equation:
where f R(t) and f A(t) are the probability density functions of the RSET and the ASET, respectively. This equation may be rewritten from the definition of the cumulative probability as follows:
where F R (t) is the cumulative probability function.
3.2 The Reliability Index
The failure probability is determined by the double integral of the ASET and the RSET when they are treated as two independent variables. However, it is difficult to determine the results unless f R(t) and f A(t) are very simple. Otherwise, it is almost impossible to calculate the failure probability. Here, the reliability index β method will be presented.
The reliability index β method was proposed by Cornell [22] and is extensively applied to solve structural engineering problems [23]. Some efforts have also been made toward applying this method to fire safety design [4, 24]. The reliability index β method utilizes information about the mean value and the standard deviation of the safety margin. For example, the reliability index β for Eq. (5) may be calculated as follows:
If t A and t R are normally distributed, G is also normally distributed. The failure probability is then calculated using the following equation:
where μ G and σ G are the mean and standard deviation of the safety margin G and Φ is the cumulative probability function of the standard normal distribution.
The reliability index β method provides an efficient way of calculating the failure probability and avoids the complex integral calculation process. However, it is not straightforward to obtain the failure probability from Eq. (12) unless the state function G is linear. For nonlinear state functions, the first order and second moment (FOSM) method should be employed to determine the failure probability [25]. Details of the FOSM method may be found in Ref. [26].
4 Integrating Fire Risk Into Current Fire Safety Designs
The failure probability may be determined by the reliability index β method, FOSM method or by the Monte Carlo simulation method. Once the failure probability is obtained, one question will arise: Is the failure probability acceptable? If not, what design values should be improved to meet the required level of failure probability, and how should this be accomplished? To answer these questions, the first step should be determining the acceptable failure probability.
4.1 Determining the Target Failure Probability by Integrating Fire Risk
The failure probability for each fire scenario, P i , f , should be less than or equal to the target failure probability, i.e.,
Because the fire risk to life safety for each fire scenario has been determined based on the above description, the ERL may be calculated as follows:
where f ig is the fire ignition frequency and A is the floor area of the building. If the ERL is the acceptable ERL, the target failure probability for scenario i may be written as follows:
where ERL i,a is the acceptable ERL for scenario i.
The next step is to determine the acceptable ERL for each fire scenario. The acceptable ERL for each fire scenario may be arbitrarily allocated provided that the following constraint is met:
4.2 Determining Design Fires Using Reliability Theory
Once the target failure probability has been determined using Eq. (15), the target reliability index β may be obtained as follows:
In practical fire safety design, the principal objective is not to determine the target reliability index but to identify a set of design values that can bring the calculated reliability index as close as possible to the target reliability index.
Let M = (x d,1 , x d,2 ,…, x d,M ) be the vector of the values of the design parameters. The objective is to derive a vector that minimizes the following objective function:
where the reliability index may be calculated using the FOSM method. The constraint for the objective function is as follows:
This procedure may be interpreted as follows: Because each set of design values corresponds to one reliability index, the set of design values may vary in their space until the corresponding reliability index approaches the target reliability index to the greatest extent possible.
A design guide should cover a large group of buildings under various conditions, such as variations in floor area, compartment height, and the occupant type in a given compartment. To cover various conditions, a geometry group with different compartment heights is considered. Hence, the objective function should be formulated as follows:
where N B is the number of the geometry group.
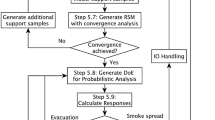
The proposed method of deriving the design values may be summarized in the three steps illustrated in Fig. 4.

The flow chart of the proposed method for deriving design values
5 Deriving Design Fires for a Group of Buildings in Various Fire Scenarios
Specifying appropriate fires is a crucial issue in fire safety design, where the assumption that a fire grows following a time-squared law is commonly applied. Hence, the fire growth rate is considered as a design parameter. Our objective is to derive design fire growth rates for different fire scenarios using the proposed method.
We consider a single hypothetical commercial compartment with an area of 2500 m2 and different compartment heights, as shown in Table 1.
5.1 Determining the Target Reliability Index for Each Fire Scenario
To derive design fires in different fire scenarios, the fire scenarios are modeled in the event tree, as shown in Fig. 1.
It may be observed from Eq. (15) that there are three principal parameters that must be confirmed: the target ERL for each fire scenario, probability of fire ignition and the probability of fire occurrence for each fire scenario.
As described in Sect. 2, the probability of occurrence for each fire scenario may be evaluated from the event tree. The probability for each fire protection system can be estimated from the statistical data shown in Table 2. Using the event tree and the data in Table 2 [27], the probability of occurrence for each fire scenario may be determined. The results are listed in Table 3.
Another parameter that needs to be determined is the target ERL for each fire scenario. Because there is no generally accepted fire risk level, statistical fire data from Beijing are adopted. According to the statistics from Beijing from 1998 to 2004 [28], the annual fire casualty rate is 1.02 × 10−5 /year, which may be considered as the target ERL in this case. Using Eqs. (14)–(16), the target ERLs for these three fire scenarios are assigned as follows:
The fire ignition frequency is taken to be 4.12 × 10−6 /(year m2) [29]. The compartment area is 2500 m2. The target failure probability for each fire scenario is obtained from Eq. (15). The corresponding reliability index for each fire scenario is determined and detailed in Table 3.
5.2 The Limit State Function for Each Fire Scenario
To derive values for the design fires using the proposed method, the limit state function for each fire scenario should be determined.
The time that elapses until the smoke layer descends to (1.6+0.1H) m is considered as the ASET. Because an analytical expression of the ASET is required in the limit state function, a multiple linear regression of ASET calculated from a two-zone model CFAST was conducted. More details about the multiple linear regression can be found in Appendix. The smoke layer descent duration may be approximated using an empirical function of the fire growth rate and the height and area of the compartment as follows:
Where, α is the fire growth rate (kW/s2); H is the compartment height (m). C is the coefficient and C α , C H and C A are the powers of α, H and A. The task of multiple linear regression is to then determine the coefficient C and the three powers. The results for these three fire scenarios are summarized in Table 4.
The RSET is usually composed of three components: the detection and alarm time, pre-evacuation time and the evacuation time. For the smoke detection time, there is no commonly accepted calculation model. In the practical engineering application, three methods are usually employed to approximately predict the smoke detection time, i.e., the optical density method, critical velocity method and the characteristic temperature rise method [30]. For above three methods, it is difficult to derive the limit state function for the smoke detection time. Since it is an initial work and a hypothetical building, a smoke height-based method is used to predict the smoke detection time here. In this method, a smoke detection system is assumed to be activated as the smoke layer descends below the ceiling by 5% of the compartment height [31]. When a smoke detection system fails to be activated, the detection time is assumed to correspond to when the smoke layer descends below the ceiling by 10% of the compartment height [32]. Because the detection time is determined by the smoke layer, as with the ASET calculation criteria, the analytical expression of the detection time may also be approximated in the form of Eq. (22). The only difference lies in the criteria: the ASET is calculated as the time from when the smoke layer descends to 1.6+0.1H m, whereas the detection time is determined as the time from when the smoke layer descends below the ceiling by 5% or 10% of the compartment height. The expressions of the detection times are presented in Table 5.
The pre-evacuation time is influenced by occupant characteristics. A more accurate representation of the pre-evacuation time may be found using a probabilistic distribution rather than a deterministic value. In this article, the pre-evacuation time is considered as an uncertain parameter. The distribution form and the range of the pre-evacuation times will be discussed in the next subsection.
As for the movement time, there are essentially two approaches available for the estimation of the evacuation time: the more traditional analytical calculation approach and the modern use of evacuation modeling. Because a one-story single compartment is analyzed and because an analytical expression is required for the limit state function, an empirical formula from Togawa [33] is used to calculate the movement time of the occupants. Because a commercial compartment presents a high occupant load, the traveling time to the exit may be neglected, and only the following time to flow through the final exits is used:
where q is the occupant density in person/m2, f is the occupant flow rate per unit of exit width in person/(m s) and W is the effective width of the exit in m.
From the above analysis, the expression of the limit state function for each fire scenario may be obtained.
5.3 Uncertain Parameters
As an iteration procedure is needed to determine the final design point in the uncertain parameter space, there may be a convergence problem if more than two uncertain parameters are considered. Therefore, as a preliminary study, only two uncertain parameters are considered: the fire growth rate and the pre-evacuation time.
Prior studies suggest that the fire growth rate should follow a certain probabilistic distribution such as log-normal distribution [34, 35]. Here, the fire growth rate is assumed to follow a log-normal distribution, and the statistical parameters are listed in Table 6. Similarly, the pre-evacuation time should also be uncertain and follow a probabilistic distribution such as normal distribution [36, 37], log-normal distribution [12] or Weibull distribution [38]. Here, a normal distribution is employed to characterize the uncertainties of the pre-evacuation time. The statistical parameters are presented in detail in Table 6. The other parameters are considered as deterministic, and their values are also summarized in Table 6.
5.4 The Derivation of Design Fires
There are seven geometric groups in this article. The calculation method for deriving the design fire principally involves determining those design values that minimize the difference between the calculated reliability index and the target reliability index.
For Fire Scenario 1, the objective function is as follows:
where \( A = \{ (\alpha ,t_{pre} );G_{i} (\alpha ,t_{pre} ) \le 0\} \).
The target reliability index for Scenario 1 is 3.71, as calculated in Sect. 5.1. Using a global optimization procedure, which is available in the Matlab® toolbox, the design fire growth rate and the pre-evacuation evacuation time are determined to be 0.187 kW/s2 and 119.6 s, respectively. The design widths of the exits for different geometric groups are also calculated. These results are summarized in Table 7.
In Scenario 1, the sprinklers and the smoke detectors work well. In the other two fire scenarios, some or all of the fire protection systems fail to function. To some extent, the calculated width of the exit in Scenario 1 may be considered the preferred value for the design of the exit. Therefore, for those scenarios in which some or all of the fire protection systems fail to work well, the objective is to derive the design fire growth rate and the pre-evacuation times with the target failure probability as well as the same design values for the exit width derived in Scenario 1. To achieve this objective, the values of the design exit width in Scenario 1 are substituted into the limit state functions of Scenarios 2 and 3. These seven equations are then considered as the equality constraints in the optimization procedure. The objective function and constraints for Scenario 2 are formulated as follows:
where the constraints are
The objective function and constraints for Scenario 3 may be obtained in a similar manner.
Given the objective function and the constraints, the design fire growth rate and the pre-evacuation time may be determined by using a global optimization method and a FOSM method. The design fire growth rates and the pre-evacuation times for these three fire scenarios are summarized in Table 8. From these data, it may be concluded that, since all the fire protection systems work well in Scenario 1, a quick fire should be assigned to this scenario. In our calculation, the design fire growth rate for Scenario 1 is the largest, which is consistent with the practical P-B FSD. In addition, compared to the design fire for Scenario 1, the design fire growth rate for Scenarios 2 and 3 are very close to each other. The difference between these two scenarios lies in the issue of whether the smoke detector detection system operates successfully. The resulting minor difference in design fire grow rate between them suggests that the influence of the smoke detection system in determining the design fire growth rate can be ignored in this study.
6 Conclusions
Aiming to incorporate acceptable fire risk levels into current P-B FSDs, a risk-based method of determining design fires is presented in this article. This method provides fire safety engineers with a guide for selecting an appropriate design fire to meet acceptable fire risk levels. To determine the acceptable fire risk level, statistical data and the concept of ERL are employed. Reliability theory is employed to determine the target reliability index based on the acceptable fire risk level. A global optimization procedure is used to determine the value of the design fire in its space, which corresponds to the minimum of the sum of the squares of the differences between the calculated reliability index and the target reliability index. As a case study, the design fires for a hypothetical single commercial compartment in different scenarios are determined by the proposed method.
It should be noted that this represents only the first attempt to derive design fires based on the acceptable fire risk level; further studies should be conducted in the future.
First, the zone model was employed to calculate the ASET, and an analytical calculation using an empirical formula was used to determine the evacuation time. In the current P-B FSDs, the field fire models such as FDS and complex evacuation models are more commonly employed to determine ASET and evacuation time. Future studies should consider how to employ the current common-used field fire model and evacuation models at acceptable computation costs to obtain accurate design fires using this method.
Second, due to the limited statistical data of the acceptable fire risk in China, statistical data for Beijing from 1998 to 2004 are employed in this case study. The statistical data are the averages for different types of buildings; however, the acceptable fire risk for various types of buildings may change. Future studies should focus on collecting statistical data of fire risk for different types of buildings and focus on establishing a complete database for acceptable fire risks.
Abbreviations
- α :
-
The fire growth rate (kW/s2)
- A :
-
The floor area of the building (m2)
- β :
-
The reliability index
- C :
-
The coefficient of the fitted expression
- C α :
-
The power of α
- C A :
-
The power of A
- C H :
-
The power of H
- C i :
-
The consequence of scenario i
- ERL i :
-
The expected risk to life of scenario i
- ERL i,a :
-
The acceptable ERL for scenario i
- f :
-
The occupant flow rate per unit of exit width (person/(m s))
- f A (t):
-
The probability density function of ASET
- f ig :
-
The fire ignition frequency per unit floor area (year m2)
- f R (t):
-
The probability density function of RSET
- F R (t):
-
The cumulative probability function
- G :
-
The safety margin
- g(m’):
-
The function of transforming the severity m’ into a measure of fire risk analysis interest
- H :
-
The height of compartment (m)
- m’ :
-
The severity measure
- M :
-
The vector of design parameters
- N B :
-
The number of the geometry group
- N p :
-
Number of occupants in the room (person)
- N s :
-
The number of fire scenarios
- P f :
-
Failure probability
- P i :
-
The occurrence probability of scenario i
- P i,f :
-
The failure probability for scenario i
- P i,f,t :
-
The target failure probability of scenario i
- q :
-
The occupant density (person/m2)
- R i :
-
The risk of fire scenario i
- S i :
-
The scenario of i
- t A :
-
Available safe egress time (s)
- t move :
-
The movement time (s)
- t R :
-
Required safe egress time (s)
- μ G :
-
The mean value of safety margin G (s)
- σ G :
-
The standard deviation of safety margin G
- W :
-
The effective width of the exit (m)
References
Guo T, Fu Z (2007) The fire situation and progress in fire safety science and technology in china. Fire Safety Journal 42 (3):171-182. doi:10.1016/j.firesaf.2006.10.005
Chu G, Wang J (2012) Study on probability distribution of fire scenarios in risk assessment to emergency evacuation. Reliability Engineering & System Safety 99:24-32. doi:10.1016/j.ress.2011.10.014
Yung D, Benichou N (2002) How design fires can be used in fire hazard analysis. Fire Technology 38 (3):231-242. doi:10.1023/A:1019830015147
Magnusson SE, Frantzich H, Harada K (1996) Fire safety design based on calculations: Uncertainty analysis and safety verification. Fire Safety Journal 27:305-334
Kong D, Johansson N, van Hees P, Lu S, Lo S (2013) A monte carlo analysis of the effect of heat release rate uncertainty on available safe egress time. Journal of Fire Protection Engineering 23 (1):5-29. doi:10.1177/1042391512452676
He YP, Horasan M, Taylor P, Ramsay C (2002) Stochastic modeling for risk assessment. In: Evans (ed) Proceedings of the 7th international symposium on fire safety science, Worcester, 2002. International association for fire safety science, pp 333–344
Chu GQ, Chen T, Sun ZH, Sun JH (2007) Probabilistic risk assessment for evacuees in building fires. Building and Environment 42 (3):1283-1290. doi:10.1016/j.buildenv.2005.12.002
Chu G, Wang J, Wang Q (2012) Time-dependent fire risk assessment for occupant evacuation in public assembly buildings. Structural Safety 38:22-31. doi:10.1016/j.strusafe.2012.02.001
Hanea DM, Jagtman HM, Ale BJM (2012) Analysis of the schiphol cell complex fire using a bayesian belief net based model. Reliability Engineering & System Safety 100 (0):115-124. doi:10.1016/j.ress.2012.01.002
Matellini DB, Wall AD, Jenkinson ID, Wang J, Pritchard R (2013) Modelling dwelling fire development and occupancy escape using bayesian network. Reliability Engineering & System Safety 114 (0):75-91. doi:10.1016/j.ress.2013.01.001
Kong D, Lu S, Kang Q, Lo S, Xie Q (2014) Fuzzy risk assessment for life safety under building fires. Fire Technology 50 (4):977-991. doi:10.1007/s10694-011-0223-z
Bensilum M, Purser DA (2002) Gridflow: An object-oriented building evacuation model combining pre-movement and movent behavior for performance-based design. In: Proceedings of the seventh international sympoisum on fire safety science, Evans, 2002. International Association on Fire Safety Science, pp 941–952
Yung D, Hadjisophocleous GV, Proulx G (1997) Modelling concepts for the risk-cost assessment model firecam and its application to a canadian government office building. Paper presented at the The fifith international sysmpoisum on fire safety science, Melbourne, Australia,
Fraser-Mitchell JN (1994) An object-oriented simulation (crisp ii) for fire risk assessment. Paper presented at the The 4th international symposium on fire safety science, Ottawa, Canada, July 13–17, 1994
Ikehata Y, Yamaguchi Ji, Nii D, Tanaka T Required travel distance and exit width for rooms determined by risk-based evacuation safety design method. In: 11th International Symposium on Fire Safety Science, University of Canterbury, New Zealand, 2014. The international association for fire safety science,
Thompson KM, Deisler PF, Schwing RC (2005) Interdisciplinary vision: The first 25 years of the society for risk analysis (sra), 1980–2005. Risk Analysis 25 (6):1333-1386. doi:10.1111/j.1539-6924.2005.00702.x
Aven T (2012) Foundational issues in risk assessment and risk management. Risk Analysis 32 (10):1647-1656. doi:10.1111/j.1539-6924.2012.01798.x
Rasmussen NC (1981) The application of probabilistic risk assessment techniques to energy technologies. Annual Review of Energy 6 (1):123-138
Wynne B (1992) Risk and social learning: Refication to engagement. Social Thoeries of Risk. Praeger
Kaplan S, Garrick BJ (1981) On the quantitative definition of risk. Risk Analysis 1 (1):11-27. doi:10.1111/j.1539-6924.1981.tb01350.x
Hall J, Jr., Sekizawa A (1991) Fire risk analysis: General conceptual framework for describing models. Fire Technology 27 (1):33-53. doi:10.1007/BF01039526
Cornell CA Structural safety specification based on second-moment reliability. In: Proceedings of Symposium on Concepts of Safety and Methods of Design, Zurich, 1969. International Assoication of Bridge and Structural Engineering, pp 235–245
Quan Q, Gengwei Z (2002) Calibration of reliability index of rc beams for serviceability limit state of maximum crack width. Reliability Engineering & System Safety 75 (3):359-366. doi:10.1016/S0951-8320(01)00133-8
Frantzich H (1998) Uncertainty and risk analysis in fire safety engineering. Lund University, Lund, Sweden
Yang K, Younis H (2005) A semi-analytical monte carlo simulation method for system’s reliability with load sharing and damage accumulation. Reliability Engineering & System Safety 87 (2):191-200. doi:10.1016/j.ress.2004.04.016
Hasofer AM, Lind NC (1974) Exact and invariant second-moment code format. Journal of the Engineering Mechanics Division 100 (1):111-121
Bukowski RW, Budnick E, Schemel C Estimates of the operational reliability of fire protection systems. In: Proceedings of the 3rd international conference on fire research and engineering. Society of Fire Protection Engineering, MA, 1999. pp 87–98
Fire Service Bureau MoPS (1998–2004) Fire statistical yearbook of china (chinese). China Personenel Press, Beijing
Ohmiya Y, Tanaka T, Notake H (2002) Design fire and load density based on risk concept. Journal of Architecture, Planning and Evironmental Engineering (551):1-8
Geiman JA, Gottuk DT, Milke JA (2006) Evaluation of smoke detector response estimation methods: Optical density, temperature rise, and velocity at alarm. Journal of Fire Protection Engineering 16 (4):251-268
He Y, Wang J, Wu Z, Hu L, Xiong Y, Fan W (2002) Smoke venting and fire safety in an industrial warehouse. Fire Safety Journal 37 (2):191-215. doi:10.1016/s0379-7112(01)00045-5
Chu G, Sun J (2008) Decision analysis on fire safety design based on evaluating building fire risk to life. Safety Science 46 (7):1125-1136. doi:10.1016/j.ssci.2007.06.011
Togawa K (1955) Study on fire escapes basing on the observation of multitude currents. Building Research Institute, Ministry of Construction, Tokyo
Deguchi Y, Notake H, Yamaguchi JI, Tanaka T Statistical estimations of the distribution of fire growth factor- study on risk-based evacuation safety design method. In: Proceedings of the Tenth International Symposium on Fire Safety Science, Marryland, USA, 2011. The International Association for Fire Safety Science. doi:10.3801/IAFFS.FSS.10-1087
Holborn P, Nolan P, Golt J (2004) An analysis of fire sizes, fire growth rates and times between events using data from fire investigations. Fire Safety Journal 39 (6):481-524. doi:10.1016/j.firesaf.2004.05.002
Chu G, Sun J (2006) The effect of pre-movement time and occupant density on evacuation time. Journal of Fire Sciences 24 (3):237-259. doi:10.1177/0734904106058249
Chu G, Sun J, Wang Q, Chen S (2006) Simulation study on the effect of pre-evacuation time and exit width on evacuation. Chinese Science Bulletin 51 (11):1381-1388. doi:10.1007/s11434-006-1381-0
MacLennan HA, Regan MA, Ware R (1999) An engineering model for the estimation of occupant premovement and or response times and the probability of their occurrence. Fire and Materials 23 (6):255-263
Jia C, Liu C, Xiang T, Zeng D (2002) The study of evacuation start time in fires(chinese). Fire safety science 11 (3):176-179
Zhang S, Jing Y (2004) Research of evacuation crowd in the business hall of large department stores (chinese). Fire Science and Technology 23 (2):133-136
Polus A, Schofer JL, Ushpiz A (1983) Pedestrain flow and level of service. Journal of Transportation Engineering PROCASCE 109:46-47
Acknowledgments
The authors acknowledge the financial support of National Natural Science Foundation of China (Grant No. 51504282), China Postdoctoral Science Foundation funded project (Grant No. 2014M560592), the Opening Fund of Key Laboratory of Fire Suppression and Rescue Technology (Grant No. KF201401), and the Fundamental Research Funds for the Central Universities (Grant No. 16CX02045A). Dr. Ping is supported by the Opening Fund of State Key Laboratory of Fire Science (Grant No. HZ2014-KF14), the Shandong Provincial Natural Science Foundation (No. ZR2014EEQ 036) and the Fundamental Research Funds for the Central Universities (Grant No. 15CX02018A). The authors appreciate the comments from the reviewers.
Author information
Authors and Affiliations
Corresponding authors
Appendix: The Generation of the Analytical Expression for the Limit State Function
Appendix: The Generation of the Analytical Expression for the Limit State Function
In order to generate the analytical expression of ASET and smoke detection time, multiple runs of a two-zone model, CFAST, were performed with variations of the input parameters to generate a number of output values. A multiple linear regression method was then employed to fit an expression of the calculated ASET values. There are three input parameters for the calculation of ASET: fire growth rate, the height and area of the compartment. The variation ranges of these three parameters are as shown in Table 9.
Scenario 1 is taken as an example here to demonstrate the generation process. In this scenario, in order to obtain the expression of ASET with fire growth rate and compartment geometry, 392 runs of CFAST simulation were conducted, using the values in Table 9. From this regression, the final expression of ASET was obtained as follows:
The error between the analytical expression results and CFAST simulation results is shown in Fig. 5(a). The adjusted R 2 is 0.907.

Regression results versus the original CFAST results for Scenario 1
In this scenario, the smoke detector works well, and detection time can be assumed to occur when the smoke layer descends to 5% of the compartment height. Similarly, the analytical expression of detection time may also be determined.
The corresponding adjusted R 2 is 0.990. The regression results and original CFAST results are shown in Fig. 5(b).
The analytical expressions of ASET and smoke detection time for Scenario 2 and 3 can be similarly determined by above process.
Rights and permissions
About this article

Cite this article
Kong, D., Lu, S. & Ping, P. A Risk-Based Method of Deriving Design Fires for Evacuation Safety in Buildings. Fire Technol 53, 771–791 (2017). https://doi.org/10.1007/s10694-016-0600-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10694-016-0600-8