
Abstract
An incoming elastodynamic wave impinges on an elastic obstacle is embedded in an infinite elastic medium. The objective of the paper is to examine the subsequent elastic fields scattered by and transmitted into the elastic obstacle. By applying a boundary-field equation method, we are able to formulate a nonlocal boundary problem (NBP) in the Laplace transformed domain, using the field equations inside the obstacle and boundary integral equations in the exterior elastic medium. Existence, uniqueness and stability of the solutions to the NBP are established in Sobolev spaces for two different integral representations. The corresponding results in the time domain are obtained. The stability bounds are translated into time domain estimates that can serve as the starting point for a numerical discretization based on Convolution Quadrature.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Scattering problems for the elastodynamic equations have attracted considerable interest over the years. However, most of the previous work has been based on time-harmonic formulations (see, e.g., [2, 5, 8, 9, 19, 20, 25], and the recent monograph [28]). Considerably fewer efforts have been carried out for transient wave propagation among which analytical studies were carried out in [7, 18, 28], while a computational method in two dimensions based on convolution quadrature was proposed in [10].
In the articles [15, 16], we were able to show for the first time that the scattering problem for fluid/solid interaction can be formulated as a non-local boundary value problem (NBP) in the Laplace transformed domain and treated numerically with the coupling of boundary elements and finite elements in space and convolution quadrature in time [22–24]. Moreover, on the theoretical side, we showed that based on the estimates in the Laplace domain, the corresponding solutions and estimates in the time domain can be easily obtained. Subsequently this approach has been adapted successfully in various settings involving acoustic wave propagation [6, 12, 13]. In this paper, following Hsiao, Sayas and Weinacht [15], we apply the time-dependent boundary-field formulation to the elastodynamic scattering and obtain an NBP in the Laplace transformed domain. In particular, we are able to prove the existence of variational solution of the NBP directly as in Hsiao and Wendland [13] (see also [4, 17]). Moreover, following the techniques laid out by Laliena and Sayas [21] for treating acoustic scattering problems, we are also able to establish the variational solution of NBP indirectly.
It is worthy mentioning that our approach based on the formulation of the NBP in the Laplace transformed domain is originally motivated from the work of Lubich for solving time-dependent boundary integral equations of convolution type, and has been advanced by Sayas and his coworkers (see, for instance, [21], the monograph [26] and references therein). The latter has become particularly popular in recent years for treating time-dependent boundary integral equations of convolution type, which is now known as the convolution quadrature (CQ) method. An essential feature of this CQ method is that it works directly on the data in the time domain rather than in the transformed domain, and does not depend upon the explicit construction of the time-dependent fundamental solutions of time-dependent partial differential equations under consideration. These features make this approach particularly well suited for numerical computations; the analytic results proven in Sect. 5 can be used to establish the minimum regularity required from problem data, as well as the convergence properties and the growth of the error in time associated to a semi-discretization based on Convolution Quadrature.
The paper is organized as follows: The governing equations for elastic wave scattering are presented in Sect. 2 in both the time and the Laplace domains. Section 3 is devoted to the formulation of two different coupled integro-differential systems for the problem that transform the unbounded exterior problem into a non-local (but bounded) problem posed on the interface of the scatterer. The required concepts from the theory of boundary integral equations as well as from Sobolev space theory are briefly presented in this section as well. The core of the analysis is contained in Sect. 4, where the variational formulations for the problems introduced in the previous section are shown to be well posed. Special care is taken to keep track of the dependence of the stability and ellipticity bounds with respect to the Laplace parameter, as these bounds contain the information required for their time-domain counterparts. The main results in the time domain follow then easily from the previous analysis and are established in the final Sect. 5.
A remark on notation: Throughout the paper we will transit between the time domain (where our problem of interest is posed) to the Laplace domain (where we will carry out the analysis) and back to the time domain (where we will finally establish existence, uniqueness regularity requirements and growth of the solution). In doing so and to avoid confusion, we will stick to the convention that functions in the time domain will be denoted by lower case letters, while functions in the Laplace domain will be denoted by upper case letters. Moreover, functions defined in the volume will be denoted by Latin letters, while we will use Greek letters for functions defined in the boundary. The table below can be used as a reference to navigate the notation.
Volume | Boundary | |
|---|---|---|
Time domain | \(u^{-},u^{+}, u^{inc}, f\) | λ,φ |
Laplace domain | \(\mathbf {U}^{-},\mathbf {U}^{+}, \mathbf {U}^{inc}, \mathbf {F}\) | Λ,Φ |
2 Formulation of the Problem
2.1 Governing Equations in the Time Domain
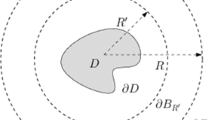
Let \(\Omega ^{-}\) be a connected (although not necessarily simply connected), bounded domain in \(\mathbb{R}^{3}\) with Lipschitz boundary \(\Gamma \); we will denote the complementary unbounded region by \(\Omega ^{+} := \mathbb{R}^{3}\setminus \overline{\Omega ^{-}}\) and the exterior unit normal vector pointing in the direction of \(\Omega ^{+}\) by \(\boldsymbol {n}\). A schematic of the problem geometry is shown in Fig. 1. Throughout this work we will consider that both \(\Omega ^{-}\) and \(\Omega ^{+}\) are occupied by linearly elastic materials. In the unbounded region \(\Omega ^{+}\) we will assume that the material is isotropic and homogeneous with density \(\rho _{+}>0\). The latter assumption of isotropy implies that, besides its density, the material in \(\Omega ^{+}\) is characterized by the Lamé parameters \(\lambda \) and \(\mu \). These coefficients are assumed to be constants satisfying the relations
The quantity \(K\) is known as the bulk modulus and characterizes the reaction of a given material to compressive stress, while \(\mu \) (also known as the shear modulus) characterizes the material’s rigidity with respect to shear stress.

Schematic of the problem geometry. For simplicity, the scattered and transmitted waves will be denoted in the text simply as \(\mathbf {u}^{+}\) and \(\mathbf {u}^{-}\) respectively
In contrast, within the bounded region \(\Omega ^{-}\) we will allow the material to be both inhomogeneous and anisotropic. More precisely, the density \(\rho _{-}\) will be considered to be a bounded positive function almost everywhere in \(\Omega ^{-}\). In addition, we will allow for the presence of body forces acting inside \(\Omega ^{-}\) but will require that they vanish identically on \(\Omega ^{+}\). These forces will be denoted by \(\mathbf {f}(\mathbf {x},t)\) and will require that: 1) The support of \(\mathbf {f}(\cdot ,t)\) is compactly contained in \(\Omega ^{-}\) for all times, 2) \(\mathbf {f}(\cdot ,t)\in \mathbf {L}^{2}(\Omega )\) for all times, 3) \(\mathbf {f}(\cdot ,t)\equiv 0\) for all \(t\leq 0\), and 4) \(\mathbf {f}(\mathbf {x},\cdot )\in \mathcal {C}^{\infty}(0,T)\) for some \(T>0\).
The isotropy/anisotropy of a material refers to the way in which mechanical stress induces deformations. Mathematically, this is reflected in the concrete way in which the linearized elastic strain tensor,
relates to the elastic stress tensor, \(\boldsymbol {\sigma}(\mathbf {u})\). According to Hooke’s law, in the regime of linear elasticity and infinitesimal strain the relation is given in terms of the fourth order stiffness tensor \(\mathbf {C}\) by
The components of the stiffness tensor satisfy the following pairwise symmetry conditions
In addition, we will require that each of the component functions \(\mathrm {C}_{ijkl}\) is essentially bounded in \(\Omega _{-}\), and that there exists a constant \(c_{0}>0\) such that
almost everywhere in \(\Omega ^{-}\). In the isotropic region, the stress tensor can be expressed succinctly in terms of the Lamé parameters as
where the identity matrix has been denoted as \(\mathbf {I}\). As customary, we will denote the elastic stress in the normal direction, or traction, as
We will consider that a small perturbation \(\mathbf {u}^{inc}\), supported away from \(\overline{\Omega ^{-}}\) for \(t\leq 0\), travels in the material eventually impinging on the region \(\Omega ^{-}\) for some positive time. This perturbation will induce transmitted, \(\mathbf {u}^{-}\), and scattered, \(\mathbf {u}^{+}\) waves that, in the regime of small stress and strain can be modeled by the equations
which must be understood in the sense of distributions. The elastic elliptic operator \(\Delta ^{*}_{i}\) appearing above is defined as \(\Delta ^{*}_{i}\mathbf {u} : = \nabla \cdot \boldsymbol{\sigma}_{i}( \mathbf {u})\), where the divergence operator acts along the rows of the tensor \(\boldsymbol{\sigma}_{i}(\mathbf {u})\). For the unbounded component, this simplifies into the familiar expression
The total displacement, along with the normal stress induced by it, must be continuous across the interface between the two materials, leading to the transmission conditions
The dynamical equations describing the evolution of the system are closed by requiring the scattered and transmitted waves to be causal, namely
Together, the equations comprising the system (1a)–(1f) fully describe the evolution of the scattered and transmitted wave.
2.2 Governing Equations in the Laplace Domain
In their seminal article [3] Bamberger and Ha-Duong laid the groundwork for the analysis of wave propagation problems by passing through the Laplace domain. Their goal was to study the well posedness of a boundary integral formulation of the wave equation in terms of the potentials associated to the Helmholtz operator, rather than the retarded potentials that arise directly in the time domain. Their approach, combined with Lubich’s method of Convolution Quadrature (CQ) [22–24] enables the design of numerical schemes that, taking as input time-domain data, approximate the solutions of the dynamical problem using only the potentials associated to the resolvent equation—which typically result in simpler discretizations than their time-domain counterparts. The reader interested in further details about CQ is referred to [11] for a brief introduction to the theory and implementation details, or to the monograph [26] for a thorough analysis and detailed applications to time domain boundary integral equations.
With the goal of formulating the problem in a way that takes advantage of Lubich’s analysis technique, we will then recast the system (1a)–(1f) in the Laplace domain; we will start by introducing some notation. The positive complex half-plane will be denoted by
and for \(s\in \mathbb{C}^{+}\), we will also use the notation
We will say that a function \(f\) is causal if \(f(\mathbf {x},t) \equiv 0\) for all \(t\leq 0\) and we will define its Laplace transform as
whenever the integral converges. As laid out in [21], this definition can be extended naturally to Hilbert space valued distributions whenever, for any \(\alpha >0\), the function \(\exp (-\alpha \cdot )f\) defines a tempered distribution with values in the space of linear mappings \(L(X,Y)\) between the Hilbert spaces \(X\) and \(Y\). In the current manuscript, we shall understand the Laplace transform in its distributional sense.
Applying the Laplace transform to the system (1a)–(1f) presented in the previous section, we obtain the following boundary value problem in the Laplace domain that we will study for \(s\in \mathbb{C}^{+}\)
where the functions in capital letters represent the Laplace transform of their time-domain counterparts appearing in the system (1a)–(1f), and the causality conditions (1e) and (1f) are implicitly enforced by the causality of the Laplace transform. In the next couple of sections we will focus on the analysis of the Laplace-domain system above, establishing its well posedness and obtaining stability bounds in terms of the Laplace parameter \(s\). These Laplace-domain results will then be transferred in the final section into time-domain statements making use of a slight improvement by Sayas [26] of a result by Lubich [24].
3 Boundary-Field Formulation
3.1 Sobolev Space Notation
Throughout this communication we will make use of standard results on Sobolev space theory that can be found in standard references such as [1, 14]. The space of scalar square-integrable functions defined over the open domain \(\mathcal {O}\) will be denoted by \(L^{2}(\mathcal {O})\), while the space of scalar-valued square integrable functions over \(\mathcal {O}\) whose distributional derivative is itself a square integrable function will be denoted by \(H^{1}(\mathcal {O})\). The vector-valued counterparts of these spaces will be denoted with boldface notation as \(\boldsymbol {L}^{2}(\mathcal {O}):=L^{2}(\mathcal {O})\times L^{2}( \mathcal {O})\times L^{2}(\mathcal {O})\) and \(\boldsymbol {H}^{1}(\mathcal {O}):=H^{1}(\mathcal {O})\times H^{1}( \mathcal {O}) \times H^{1}(\mathcal {O})\) respectively.
The \(L^{2}\)-inner product will be denoted by the symbol \((\cdot ,\cdot )_{\mathcal {O}}\) and should be understood as
The \(\boldsymbol {L}^{2}(\mathcal {O})\) and \(\boldsymbol {H}^{1}(\mathcal {O})\) norms induced by this inner product will be denoted respectively as
where the overline denotes complex conjugation. The definition of the inner products ensures that this definition encompasses both the vector and matrix norms.
The notion of “restriction to the boundary” can be extended to functions in \(H^{1}(\Omega )\). This generalized restriction operator is known as the trace operator and will be denoted by \(\gamma \) and coincides exactly with the restriction if a function is continuous on \(\overline{\mathcal {O}}\). The space of functions defined on \(\partial \mathcal {O}\) and corresponding to the trace of a function in \(H^{1}(\mathcal {O})\) will be denoted as \(H^{1/2}(\partial \mathcal {O})\); its dual space will be denoted by \(H^{-1/2}(\partial \mathcal {O})\)—the corresponding spaces for vector valued functions will be distinguished by the use of boldface. The duality pairing between \(\mu \in H^{-1/2}(\partial \mathcal {O})\) and \(\eta \in H^{1/2}(\partial \mathcal {O})\) will be denoted by angled brackets \(\langle \mu ,\eta \rangle _{\partial \mathcal {O}}\). This product agrees with the integral of \(\int _{\partial \mathcal {O}}\mu \eta \) whenever the integral is well defined. The induced norms in the trace space and its dual will be denoted by \(\|\cdot \|_{1/2,\partial \mathcal {O}}\) and \(\|\cdot \|_{-1/2,\partial \mathcal {O}}\) respectively. In all cases, and for the sake of notational simplicity, we will omit the domain from the norm whenever it is clear from the context.
The natural space for the solutions to the Laplace domain Navier-Lamé equations will be defined as
where the norm in the definition is given by
If the boundary of \(\mathcal {O}\) is Lipschitz, the following integration by parts formula (Betti’s formula) holds for all functions \(\mathbf {U} \in \boldsymbol {H}^{1}_{\Delta ^{*}}(\mathbf {R}^{d})\) and \(\mathbf {V} \in \boldsymbol {H}^{1}(\mathbb{R}^{d})\)
where \(\mathcal {O}_{-}\) denotes the bounded region enclosed by \(\partial \mathcal {O}\), \(\mathcal {O}_{+}:=\mathbb{R}^{3}\setminus \overline{\mathcal {O}_{-}}\) its unbounded complement, and symbols \(\gamma ^{-}\) and \(\gamma ^{+}\) denote the trace operators for the inner and outer domain respectively. Betti’s formula above also serves as a definition of the distributional traction operator and will be essential in deriving the weak formulation of the problem.
We will also make use of the following energy norm for \(s\in \mathbb{C}_{+}\) and \(\rho >0\):
The following norm equivalence holds
Throughout the manuscript, we will make frequent use of the fact that, for \(s=1\), the norm \(|\!|\!|{\cdot }|\!|\!| _{1,\mathcal {O}}\) is equivalent to the \(\mathbf {H}^{1}(\mathcal {O})\) norm.
Finally, the symbol ≲ will be frequently used in the estimates to obviate generic constants that do not depend on the Laplace parameter \(s\) or its real part \(\sigma \). Hence, the expression \(\mathbf {U} \lesssim \mathbf {V} \) should be understood as: “There exists a positive constant \(C\) independent of \(s\) such that \(\mathbf {U} \leq C \mathbf {V}\). The dependence of the estimates with respect to the Laplace parameter will be tracked explicitly.
3.2 Elastic Layer Potentials and Operators
We will now recast the exterior part of the Laplace domain problem (2a)–(2d) in terms of boundary integral equations [14]. To that end, we will first introduce the fundamental solution \(\mathbf {E}(\boldsymbol {x},\boldsymbol {y}; s)\) to the exterior three-dimensional Navier-Lamé equation (2a) given by [20, Chap. 2]
where \(c_{s}:=\sqrt{\mu /\rho _{+}}\) and \(c_{p}:=\sqrt{(2\mu +\lambda )/\rho _{+}}\) correspond respectively to the speed of shear (transversal) and pressure (longitudinal) waves travelling through \(\Omega _{+}\), and \(\mathbf {I}\) denotes the identity matrix. Note that the time-harmonic fundamental solution can be recovered from the expression above by the substitution \(s \mapsto -i\omega \) (see, e.g., [2]).
Using the fundamental solution and considering \(\boldsymbol{\varPhi}\in \boldsymbol {H}^{1/2}(\Gamma )\), and \(\boldsymbol{\Lambda}\in \boldsymbol {H}^{-1/2}(\Gamma )\) it is possible to define two layer potentials
which both satisfy the equation (2a) for any \(\boldsymbol {x}\in \mathbb{R}^{3}\setminus \Gamma \). These functions satisfy the following conditions across the boundary \(\Gamma \)
where for a function \(\boldsymbol {v}\) and all points \(\boldsymbol {y}\in \Gamma \) the jump operator \(\left[\!\![{\cdot } \right]\!\!]\) is defined as
Considering the average value of the layer potentials, rather than their jump, leads to the following four boundary integral operators
where average the operator \(\left \{\!\!\left \{ {\cdot } \right \}\!\!\right \} \) is defined as
Combining the jump conditions (7) with the layer operators (8) it is possible to derive the following identities:
where the identity operator was denoted by ℐ.
3.3 Two Non-local Boundary Problems
Since the functions defined by the single and double later potentials (6a), (6b) satisfy the exterior equation (2a), we will then propose two representations involving the single and double layer potentials in terms of unknown densities \(\boldsymbol{\Lambda}\) and \(\boldsymbol{\varPhi}\). To determine these we will make use of the transmission conditions (2c) and (2d) to derive two different boundary integral formulations.
3.3.1 A Direct Formulation
We start by proposing an ansatz of the form
To determine the unknown functions \(\boldsymbol{\Lambda}\) and \(\boldsymbol{\varPhi}\) we observe that from the transmission condition (2c) and the integral representation of \(\mathbf {U}^{+}\) it follows that
where we made use of the continuity of the single layer potential (7) and the identity (9b).
On the other hand, the ansatz for \(\mathbf {U}^{+}\) for \(\boldsymbol {x}\in \Omega _{-}\) implies that \(\mathbf {T}^{-}\mathbf {U}^{+}=0\). From this observation two important facts follow. First, using the jump conditions for the normal traction (7), we have that \(\boldsymbol{\Lambda}= - \left[\!\![{\mathbf {T}\mathbf {U}^{+}} \right]\!\!]= \mathbf {T}^{+}\mathbf {U}^{+}\) and therefore the transmission condition (2d) can be written as
Second, the integral representation (10), the identity (9a), and \(\mathbf {T}^{-}\mathbf {U}^{+}=0\) lead to
We note that if in (10) \(\mathbf {U}^{+}(\boldsymbol {x})\) is only defined for \(\boldsymbol {x} \in \Omega +\) we will arrive at the same equation from
since \(\mathbf {T}^{+}\mathbf {U}^{+} = \boldsymbol{\Lambda}\). Then, the above integral equation implies that \(\mathbf {T}^{-}\mathbf {U}^{+}= 0\) and by the uniqueness of the corresponding Neumann boundary value problem in \(\Omega _{-}\), without loss of generality, we can conclude that \(\mathbf {U}^{+} = \boldsymbol {0}\) in \(\Omega _{-}\) as in (10).
These last three equations together with (2b) give rise to the following non-local problem for the unknown functions \((\mathbf {U}^{-},\boldsymbol{\Lambda},\boldsymbol{\varPhi})\in \boldsymbol {H}^{1}(\Omega ^{-})\times \boldsymbol {H}^{-1/2}(\Gamma ) \times \boldsymbol {H}^{1/2}(\Gamma )\):
It is clear that, given a solution triplet \((\mathbf {U}^{-},\boldsymbol{\Lambda},\boldsymbol{\varPhi})\) to (11a)–(11d), we can use the densities \(\boldsymbol{\Lambda}\) and \(\boldsymbol{\varPhi}\) to define \(\mathbf {U}^{+}\) through the integral representation (10) and the pair \((\mathbf {U}^{-},\mathbf {U}^{+})\) is then a solution to (2a)–(2d). Conversely, if \((\mathbf {U}^{-},\mathbf {U}^{+})\in \boldsymbol {H}^{1}(\Omega _{-}) \times \boldsymbol {H}^{1}(\Omega _{+})\) satisfies the system (2a)–(2d) we can then define
and the triplet \((\mathbf {U}^{-},\boldsymbol{\Lambda},\boldsymbol{\varPhi})\) will satisfy the integro-differential system (11a)–(11d). Hence, problems (2a)–(2d) and (11a)–(11d) are equivalent.
3.3.2 An Alternative Formulation
Alternatively, we can propose a solution of the form
With this ansatz we have that \(\left[\!\![{\mathbf {T}\mathbf {U}^{+}} \right]\!\!]= - \boldsymbol{\Lambda}= -\mathbf {T}^{+}\mathbf {U}^{+}\), and therefore the transmission condition (2d) becomes
Just like before, computing \(\gamma ^{+}\mathbf {U}\) and \(\mathbf {T}^{-}\mathbf {U}^{+}\) from the integral representation (12) with the aid of (8) and (9a), (9b), together with (2c) and the fact that \(\mathbf {T}^{-}\mathbf {U}^{+}=0\) leads to a set of two boundary integral equations for \(\boldsymbol{\Lambda}\) and \(\boldsymbol{\varPhi}\). Putting it all together we arrive at the following non-local problem
An argument analogous to the one used for the previous formulation shows that given a solution pair \((\mathbf {U}^{-},\mathbf {U}^{+})\) to (11a)–(11d), then the triplet \((\mathbf {U}^{-},\boldsymbol{\Lambda}:=\mathbf {T}^{+}\mathbf {U}^{+}, \boldsymbol{\varPhi}:=s^{-1}\gamma ^{+}\mathbf {U}^{+})\) satisfies (13a)–(13d). Reciprocally, given \((\mathbf {U}^{-},\boldsymbol{\Lambda},\boldsymbol{\varPhi})\) satisfying (13a)–(13d), then defining \(\mathbf {U}^{+}\) through (12), the pair \((\mathbf {U}^{-},\mathbf {U}^{+})\) will determine a solution to (11a)–(11d).
We remark that this relatively unusual representation of \(\mathbf {U}^{+}\) is motivated from the approach used for acoustic scattering problems in [13, 17]. As will be seen, the special scaling of the trace, \(\gamma ^{+} \mathbf {U}^{+} = s^{-1} \varPhi \), leads to the direct ellipticity of the boundary integral operators involved (compare Lemma 5 below for the alternative representation and Lemma 2 for the direct representation).
4 Laplace-Domain Bounds
4.1 Variational Formulation of the Direct Problem
Testing equation (11a) with \(\mathbf {V}\in \boldsymbol {H}^{1}(\Omega ^{-})\), equation (11c) with \(\boldsymbol{\mu}\in \boldsymbol {H}^{-1/2}(\Gamma )\) and equation (11d) with \(\boldsymbol{\eta}\in \boldsymbol {H}^{1/2}(\Gamma )\), together with Betti’s formula (3) and the transmission condition (11b) leads to the variational formulation
The key for proving well posedness of this system (laid out in [21] for the Laplace resolvent equation) is to realize that a function defined through layer potentials—in particular through the first line of (10)—in fact satisfies a transmission problem in the bigger domain \(\mathbb{R}^{3}\setminus \Gamma \). We thus have the following
Lemma 1
The variational problem (14a)–(14c) is equivalent to that of finding \((\mathbf {U}^{-},\mathbf {U}^{*})\in \boldsymbol {H}^{1}(\Omega ^{-}) \times \boldsymbol {H}^{1}(\mathbb{R}^{3}\setminus \Gamma )\) such that
and
for every
Proof
Consider a solution \((\mathbf {U}^{-},\boldsymbol{\Lambda},\boldsymbol{\varPhi})\) to (14a)–(14c) and define
From this integral representation we can make use of (8), (9a), and (9b) to compute
Substituting the first of these expressions into (14b) leads to equation (15a), whereas the second one combined with (14c) implies that, for any \(\boldsymbol{\eta}\in \boldsymbol {H}^{1/2}(\Gamma )\)
Now, since (14a) must hold for any \(\mathbf {V}\in \boldsymbol {H}^{1}(\Omega _{-})\), it follows that
here we used the fact that, by construction, \(\left[\!\![{\mathbf {T} \mathbf {U}^{*}} \right]\!\!]= \boldsymbol{\Lambda}\). Moreover, from the definition of \(\mathbf {U}^{*}\) in terms of layer potentials it also follows that
Testing the equation above with \(\mathbf {W}\in \mathbf {H}^{1}(\mathbb{R}^{3}\setminus \Gamma )\) leads to
From here, it is easy to see that adding (18) and (20) leads to the variational equation (15b), since the test functions are such that \(\gamma ^{+}\mathbf {W} = -\gamma ^{-}\mathbf {V}\).
Conversely, to show (15a) and (15b) imply (14), we begin (15b) with \((\boldsymbol {0}, \mathbf {W},)\in \mathbf {H}_{0}\) and compute
where in the last step we used the fact that, since the test pair belongs to \(\mathbf {H}_{0}\), then \(\mathbf {V} =\boldsymbol {0}\) forces \(\mathbf{\gamma}^{+}\mathbf {W}= \boldsymbol {0}\). The equality above must also hold for all \(\mathbf {W}\) supported away from the boundary, hence we have that
must both hold independently. From this, we can conclude that in the sense of distributions
and therefore \(\mathbf {U}^{*}\) admits an integral representation of the form (16), where we will define \(\boldsymbol{\Lambda}:= \left[\!\![{\mathbf {T}\mathbf {U}^{*}} \right]\!\!]\) and \(\boldsymbol{\varPhi}:= \left[\!\![{\gamma \mathbf {U}^{*}} \right]\!\!]\). If we compute \(\gamma ^{+}\mathbf {U}^{*}\) from the integral representation using (8) and (9b) and substitute the resulting expression into (15a) we obtain (14b). Similarly, computing \(\mathbf {T}^{-}\mathbf {U}^{*}\) from the integral representation using (8) and (9a), and recalling that the mapping \(\gamma ^{-}: \boldsymbol {H}^{1}(\mathbf {\Omega}_{-}) \to \boldsymbol {H}^{1/2}(\Gamma )\) is surjective, it follows that (21) implies (14c). Note that (21) also implies that
Finally, to obtain (14a) we go back to (15b) and apply (3) to the terms involving \(\mathbf {W}\), keeping in mind (21). This leads to
However, recalling that \(\gamma ^{+}\mathbf {W} = -\gamma ^{-}\mathbf {V}\) and using (22) we see that the equality above is in fact (14a), which concludes the proof. □
The last lemma implies that in order to show the unique solvability of the non-local system (14a)–(14c), it is enough to show that the transmission problem (15a), (15b) is well posed. This motivates the definition
where \(\mathbf {U}^{inc} \in \mathbf {H}^{1}(\mathbb{R}^{3}\setminus \Gamma )\) is an extension of \(\gamma ^{+}\mathbf {U}^{inc}\) such that \(\mathbf {U}^{inc} \equiv \mathbf {0}\) in \(\Omega _{-}\), and of the bilinear and linear forms
In the last term above and in the sequel, the function \(\mathbf {U}^{inc}\) should be understood as an \(\boldsymbol {H}^{1}\) extension of the boundary data into \(\Omega _{+}\). With this notation, and defining \(\mathbf {U}^{*}_{0}:=\mathbf {U}^{*} - \mathbf {U}^{inc}\), the variational problem (15a), (15b) can posed as that of finding \((\mathbf {U}^{-}, \mathbf {U}^{*}_{0}) \in \mathbf {H}_{0}\) such that
We will now show that this problem has indeed a unique solution
Lemma 2
The bilinear form \(A(\cdot ,\cdot )\) defined above is strongly elliptic.
Proof
This follows directly from the computation
□
We will now make use of the lemma above to estimate the norms of the densities \(\boldsymbol{\varPhi}\) and \(\boldsymbol{\Lambda}\) in terms of the energy norm of the displacement field \(\mathbf {U}\). In order to do so we will also need to make use of the following two lemmas.
Lemma 3
If for a Lipschitz domain \(\mathcal {O}\) and \(s\in \mathbb{C}_{+}\) the function \(\mathbf {U}\in \boldsymbol {H}_{\Delta ^{*}}^{1}(\mathcal {O})\) satisfies
then there exists \(C_{\partial \mathcal {O}}>0\) such that
This result is a straightforward generalization of [26, Proposition 2.5.2], which in turn relies on a result by Bamberger and Ha-Duong, [3], regarding the existence of an optimal lifting of Dirichlet traces for the Laplace resolvent equation which can also be extended to the Navier-Lamé resolvent equation. Since the generalizations are straightforward, we will not show the proof of this result here and instead refer the reader to [3] and [26] for the proofs of the Laplace counterparts.
The second lemma that we will need establishes the explicit dependence of the continuity of the single and double layer potentials with respect to the Laplace parameter \(s\) and its real part \(\sigma >0\).
Lemma 4
The following bounds for the single and double layer potential hold
Proof
We start by considering \(\boldsymbol{\Lambda}\in H^{-1/2}(\Gamma )\) and \(\boldsymbol{\varPhi}\in H^{1/2}(\Gamma )\), and defining
It then follows from an argument analogous to the one employed in Lemma 2 that
Making use the norm equivalence relations (5), the estimates (24) and (25) can be extracted from the above sequence of inequalities. Analogously it is possible to see that
from which (27) follows. One further application of (5) on the left end of the sequence above leads to (26). □
Theorem 1
Problem (14a)–(14c) is uniquely solvable and there exist constants \(C_{1}>0\) and \(C_{2}>0\) such that
Proof
We start by noticing that, since \(\mathbf {U}_{0}^{*}:=\mathbf {U}^{*}-\mathbf {U}^{inc}\), the pair \((\mathbf {U}_{0}^{-},\mathbf {U}_{0}^{*} )\) is such that
and therefore it satisfies problem (23). Hence, from Lemma 2, and fact that
we see that
from which we obtain
Then, for the solution \((\mathbf {U}^{-}, \mathbf {U}^{*})\), we prove
which leads to (28).
Now we recall that \(\boldsymbol{\phi}= \left[\!\![{\gamma \mathbf {U}^{*}} \right]\!\!]\) and therefore
Analogously, since \(\boldsymbol{\Lambda}= \left[\!\![{\mathbf {T}\mathbf {U}^{*}} \right]\!\!]\), it follows from Lemma 3 that
Using the last two inequalities together with (28) we can conclude that
From which (29) follows readily. □
4.2 Variational Formulation of the Alternative Problem
We start by defining the operators
where \((\mathbf {V},\boldsymbol{\mu},\boldsymbol{\eta})\in \boldsymbol {H}^{1}( \Omega _{-})\times \boldsymbol {H}^{-1/2}(\Gamma )\times \boldsymbol {H}^{1/2}( \Gamma )\) are arbitrary test functions.
With this notation we can write the variational formulation of (13a)–(13d) as the problem of finding \((\mathbf {U}^{-},\boldsymbol{\Lambda},\boldsymbol{\varPhi})\in \boldsymbol {H}^{1}(\Omega _{-})\times \boldsymbol {H}^{-1/2}(\Gamma ) \times \boldsymbol {H}^{1/2}(\Gamma )\), such that for every \((\mathbf {V},\boldsymbol{\mu},\boldsymbol{\eta})\in \boldsymbol {H}^{1}( \Omega _{-})\times \boldsymbol {H}^{-1/2}(\Gamma )\times \boldsymbol {H}^{1/2}( \Gamma )\)
where \(\langle \cdot , \cdot \rangle \) denotes the duality paring between
and the data is given by
To prove the well-posedness of this problem, we will need first prove the following
Lemma 5
The operator \(\mathrm {B}_{0}(s)\) defined in (31) is strongly elliptic in the sense that there exists \(C>0\) such that
Proof
Consider the equation (19) that we repeat here for convenience
and define
From its definition, it follows that \(\mathbf {U}\) satisfies
Using these identities we can then compute
We then use this result combined with (34), the trace theorem, and (5) as follows
Analogously, we use the estimate from Lemma 3, the identity (35), and the fact that if \(s\in \mathbb{C}_{+}\) it follows that \(1\leq |s|/\underline{\sigma}\) to bound
From the two sequences of inequalities above we then conclude that
which concludes the proof. □
With the aid of this result, it is possible then to show that the operator \(\mathcal {A}\) from the variational problem (32) is strongly elliptic.
Theorem 2
The problem (32) is uniquely solvable. Moreover, there exist constants \(C_{1}>0\) and \(C_{2}>0\) such that
Proof
We start by computing
which implies the unique solvability of (32).
We now start from the inequality (38) and use the fact that \((\mathbf {U},\boldsymbol{\Lambda},\boldsymbol{\varPhi})\) satisfies (32) to show that
From this inequality and recalling that \((\mathbf {F},\overline{\mathbf {U}})_{\Omega _{-}} \leq \underline{\sigma}^{-1}\|\mathbf {F}\|_{\Omega _{-}} |\!|\!|{\mathbf {U}}| \!|\!| _{|s|,\Omega _{-}}\) we see that (36) follows readily.
To derive the stability bound (37) we first note that the mapping properties of the single and double layer potentials in Lemma 4 imply that there exists \(C>0\) such that
Hence, it follows that
Therefore using (36) we can see that
from which (37) follows. □
4.3 Contrasting the Two Formulations
In the previous sections we have introduced two different formulations for problem (2a)–(2d) and derived stability estimates for each of them. A simple comparison of the bounds obtained for both approaches leads to the following conclusion: For the volume unknowns, \(\mathbf {U}^{-}\) and \(\mathbf {U}^{*}\), the direct approach using the representation (10) yields a better result in terms of smaller powers of \(|s|\) and \(\sigma \) as shown in (28), namely
However, as we shall see in Sect. 5.2, when one considers the boundary unknowns \(\boldsymbol{\Lambda}\) and \(\boldsymbol{\varPhi}\), together with the solution on the interior domain \(\mathbf {U}^{-}\), the bound (36) stemming from the alternative approach using the representation (12)
will translate into better estimates on the growth of the solution for longer times. Hence, in order to obtain optimal information from both boundary and volume unknowns, both approaches are valuable.
5 Results in the Time Domain
5.1 Preliminaries in the Time Domain
Thanks to a result originally due Christian Lubich [24] and to a subsequent refinement by Francisco–Javier Sayas [26], the bounds obtained in the previous section in terms of the Laplace parameter \(s\) and its real part \(\sigma \) can then be readily transferred to results regarding the growth of the solution in time as well as the regularity requirements for problem data in the time domain.
Before introducing the aforementioned theorem, some definitions are required:
-
The space of bounded linear operators between the Banach spaces \(X\) and \(Y\) will be denoted as \(\mathcal {B}(X,Y)\).
-
The space of continuous functions mapping a real parameter to a Banach space \(X\) and having \(k\) continuous derivatives will be denoted as \(\mathcal {C}^{k}(\mathbb{R}, X)\).
-
For an analytic function \(A(s)\) mapping \(\mathbb{C}_{+}\) to \(\mathcal {B}(X,Y)\), and \(\alpha \in [0,1)\), we will say that \(A(\cdot )\) belongs to the class \(\mathcal{A} (k + \alpha , \mathcal{B}(X, Y))\) if there exists a non-negative integer \(k\) such that
$$ \|A(s)\|_{X,Y} \le C_{A}\left (\sigma \right ) |s|^{k + \alpha} \quad \mbox{for}\quad s \in \mathbb{C}_{+} , $$where \(\sigma :=\mathrm{Re} (s)\), and \(C_{A} : (0, \infty ) \rightarrow (0, \infty ) \) is a non-increasing function such that
$$ C_{A}(\sigma ) \le \frac{ c}{\sigma ^{m}} , \quad \forall \quad \sigma \in ( 0, 1] $$for some \(m \ge 0\) and constant \(c>0\).
-
For a Banach space \(X\), the set of \(X\)-valued time domain distributions will be denoted as \(\mathrm{TD}(X)\).
-
We will define the distributional convolution of the \(\mathcal {B}(X,Y)\)-valued time-domain distribution \(a := \mathcal {L}^{-1}\{A\}\in \mathrm{TD}(\mathcal {B}(X,Y)) \) and the \(X\)-valued causal distribution \(g: =\mathcal {L}^{-1}\{G\}: \in \mathrm{TD}(X)\) as
$$ (a*g)(t) : = \mathcal{L}^{-1}\{AG\}. $$
5.2 Existence, Uniqueness and Time Regularity
We start by defining the spaces
and the solution operators
where \((\mathbf {U}^{-},\mathbf {U}^{*})\) satisfies (2a)–(2d) (with \(\mathbf {U}^{+}\) replaced by -\(\mathbf {U}^{*}\)) and \((\mathbf {U}^{-},\boldsymbol{\Lambda},\boldsymbol{\varPhi})\) satisfies (13a)–(13d).
With all the previous definitions in place, we can now state the result that will allow us to extract time domain results from the Laplace domain results that we have obtained so far. The reader is referred to [27] and [26, Proposition 3.2.2] for the proof of this result and for further details about Banach space valued time domain and causal distributions.
Theorem 3
Let \(A = \mathcal{L}\{a\} \in \mathcal{A} (k + \alpha , \mathcal{B}(X, Y))\) with \(\alpha \in [0, 1)\) and \(k\) a non-negative integer. If \(g \in \mathcal{C}^{k+1}(\mathbb{R}, X)\) is causal and its derivative \(g^{(k+2)}\) is integrable, then \(a* g \in \mathcal{C}(\mathbb{R}, Y)\) is causal and
where
the function \(\Gamma (\cdot )\) is the Gamma function, and
The Laplace-domain existence and uniqueness results established in Sect. 4 combined with the invertibility of the Laplace transform imply the existence and uniqueness of the solutions to the time-domain problem. Moreover, the stability bounds obtained for the solutions to (2a)–(2d) (keeping in mind the observation made in 4.3) allow us then to conclude that the solution operators are such that
As a consequence of Theorem 3, these observations constitute the proof of the following result regarding the time regularity required from problem data, the time-regularity of the volume and boundary unknowns and their growth in time.
Theorem 4
-
1.
If \(g:=(\mathbf {f},\mathbf {T}^{+}\mathbf {u}^{inc},\gamma ^{+}\mathbf {u}^{inc}) \in \mathcal {C}^{3}(\mathbb{R},\boldsymbol {X})\) is causal and the time derivative \(g^{(4)}\) is integrable then \((\mathbf {u}^{-},\mathbf {u}^{*})\in \mathcal {C}(\mathbb{R},\boldsymbol {Y}_{1})\) is causal and
$$ \|\mathbf {u}^{-}(t)\|_{\Omega _{-}} + \|\mathbf {u}^{*}(t)\|_{\mathbb{R}^{3} \setminus \Gamma} \lesssim \frac{t^{2}\max \{1,t^{3}\}}{1+t}\int _{0}^{t} \|(\mathcal{P}_{2}g^{(2)})(\tau ) \|_{\boldsymbol {X}} \; d\tau . $$ -
2.
If \(g:=(\mathbf {f},\mathbf {T}^{+}\mathbf {u}^{inc},\gamma ^{+}\mathbf {u}^{inc}) \in \mathcal {C}^{4}(\mathbb{R},\boldsymbol {X})\) is causal and the time derivative \(g^{(5)}\) is integrable then \((\mathbf {u}^{-},\boldsymbol{\Lambda},\boldsymbol{\varPhi})\in \mathcal {C}(\mathbb{R},\boldsymbol {Y}_{2})\) is causal and
$$ \|\mathbf {u}^{-}(t)\|_{\Omega _{-}} + \|\boldsymbol{\lambda}(t)\|_{-1/2} + \|\boldsymbol{\varphi}(t)\|_{1/2} \lesssim \frac{t^{2}\max \{1,t^{4}\}}{1+t}\int _{0}^{t} \|(\mathcal{P}_{2}g^{(3)})( \tau ) \|_{\boldsymbol {X}} \; d\tau . $$
A remark on time semidiscretization: Beyond the information that this result provides about the continuous problem, the theorem also provides a glimpse into the behavior of the discretization error of any Convolution Quadrature based time semidiscretization. In that context, the linearity of the problem implies that the discretization errors satisfy a system with the same structure as the unknowns themselves. The error equations can then be analyzed analogously to what we have done here and a results much like the theorem above can be proven. In that case, the quantities on the left hand sides of the estimates above would correspond to the time-discretization error of each of the variables involved, while the integral on the right hand side is proportional to the accuracy of the time-stepping method used for Convolution Quadrature. The factor involving the time growth would remain identical, thus providing an upper bound to the growth of the time discretization error. The detailed analysis of the fully discretized problem will be the subject of a separate communication.
References
Adams, R.A., Fournier, J.J.F.: Sobolev spaces. In: Pure and Applied Mathematics (Amsterdam), 2nd edn. vol. 140, p. xiv+305. Elsevier/Academic Press, Amsterdam (2003)
Ahner, J., Hsiao, G.C.: A Neumann series representation for solutions to boundary value problems in dynamic elasticity. Q. Appl. Math. 33, 73–80 (1975)
Bamberger, A., Duong, T.H.: Formulation variationnelle espace-temps pour le calcul par potentiel retardé de la diffraction d’une onde acoustique. I. Math. Methods Appl. Sci. 8(3), 405–435 (1986)
Banjai, L., Lubich, D., Sayas, F.-J.: Stable numerical coupling of exterior and interior problems for the wave equation. Numer. Math. 129, 611–646 (2015). https://doi.org/10.1007/s00211-014-0650-0
Bao, Y., Varatharajulu, V.: Huygen’s principle, radiation conditions, and integral formulas for the elastic waves. J. Acoust. Soc. Am. 59(6), 1361–1371 (1976)
Brown, T.S., Sánchez-Vizuet, T., Sayas, F.-J.: Evolution of a semidiscrete system modeling the scattering of acoustic waves by a piezoelectric solid. ESAIM: Math. Model. Numer. Anal. 52(2), 423–455 (2018)
Cruse, T., Rizzo, F.J.: A direct formulation and numerical solution of the general transient elastodynamic problem I. J. Math. Anal. Appl. 22, 244–259 (1968)
Dassios, G., Kleinman, R.: Low Frequency Scattering. Oxford Science, Oxford (2000)
Dassios, G., Rigou, Z.: On the density of traction traces in scattering of elastic waves. SIAM J. Appl. Math. 53(1), 141–153 (1993)
Domínguez, V., Sánchez-Vizuet, T., Sayas, F.-J.: A fully discrete Calderón calculus for the two-dimensional elastic wave equation. Comput. Math. Appl. 69(7), 620–635 (2015)
Hassell, M., Sayas, F.-J.: Convolution quadrature for wave simulations. In: Numerical Simulation in Physics and Engineering. SEMA SIMAI Springer Ser., vol. 9, pp. 71–159. Springer, Cham (2016)
Hsiao, G.C., Sánchez-Vizuet, T.: Time-dependent wave-structure interaction revisited: thermo-piezoelectric scatterers. Fluids 6(101), 1–19 (2021). https://doi.org/10.3390/fluids6030101
Hsiao, G.C., Wendland, W.L.: On the propagation of acoustic waves in a thermo-electro-magneto-elastic solid. Appl. Anal. 101, 3785–3803 (2021). https://doi.org/10.1080/00036811.2021.1986027. Published online: 05 Oct 2021
Hsiao, G.C., Wendland, W.L.: Boundary Integral Equations, 2nd edn. Springer, Berlin (2021)
Hsiao, G.C., Sayas, F.-J., Weinacht, R.J.: Time-dependent fluid-structure interaction. Math. Methods Appl. Sci. 40, 486–500 (2015). https://doi.org/10.1137/14099173x. Article first published on-line 19 Mar 2015
Hsiao, G.C., Sánchez-Vizuet, T., Sayas, F.: Boundary and coupled boundary–finite element methods for transient wave–structure interaction. IMA J. Numer. Anal. 37(1), 237–265 (2016)
Hsiao, G.C., Sánchez-Vizuet, T., Sayas, F.-J.: A time-dependent wave-thermoelastic solid interaction. IMA J. Numer. Anal. 39, 924–956 (2019). https://doi.org/10.1093/imanum/dry016
Kielhorn, L., Schanz, M.: Convolution quadrature method-based symmetric Galerkin boundary element method for 3-D elastodynamics. Int. J. Numer. Methods Eng. 76, 1724–1746 (2008)
Kupradze, V.: Dynamical Problems in Elasticity. North-Holland, Amsterdam (1963)
Kupradze, V.D., Gegelia, T.G., Basheleĭshvili, M.O., Burchuladze, T.V.: Three-dimensional problems of the mathematical theory of elasticity and thermoelasticity. In: Kupradze, V.D. (ed.) North-Holland Series in Applied Mathematics and Mechanics, vol. 25, p. xix+929. North-Holland, Amsterdam (1979). Russian edition
Laliena, A.R., Sayas, F.-J.: Theoretical aspects of the application of convolution quadrature to scattering of acoustic waves. Numer. Math. 112(4), 637–678 (2009)
Lubich, C.: Convolution quadrature and discretized operational calculus. I. Numer. Math. 52(2), 129–145 (1988)
Lubich, C.: Convolution quadrature and discretized operational calculus. II. Numer. Math. 52(4), 413–425 (1988)
Lubich, C.: On the multistep time discretization of linear initial-boundary value problems and their boundary integral equations. Numer. Math. 67(3), 365–389 (1994)
Rizzo, F., Shippy, D., Rezayat, M.: A boundary integral equation method for radiation and scattering of elastic waves in three dimensions. Int. J. Numer. Methods Eng. 21, 115–129 (1985)
Sayas, F.-J.: Retarded Potentials and Time Domain Boundary Integral Equations: A Road Map. Springer Series in Computational Mathematics, vol. 50. Springer, Cham (2016)
Sayas, F.-J.: Errata to: Retarded potentials and time domain boundary integral equations: a road-map. https://team-pancho.github.io/documents/ERRATA.pdf
Tong, M.S., Chew, W.C.: The Nyström Method in Electromagnetics. Wiley, Singapore (2020)
Funding
Tonatiuh Sánchez-Vizuet was partially funded by the United States National Science Foundation through the grant NSF-DMS-2137305.
Author information
Authors and Affiliations
Contributions
All authors contributed equally to this work. The order of authorship follows strictly alphabetical order.
Corresponding author
Ethics declarations
Competing interests
The authors have no other relevant financial or non-financial interests to disclose.
A personal note from George C. Hsiao
In memory of my sister Laura.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Hsiao, G.C., Sánchez-Vizuet, T. & Wendland, W.L. A Boundary-Field Formulation for Elastodynamic Scattering. J Elast 153, 5–27 (2023). https://doi.org/10.1007/s10659-022-09964-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10659-022-09964-7
Keywords
- Transient wave scattering
- Elastodynamics
- Time-dependent boundary integral equations
- Convolution quadrature