
Abstract
We derive the static and dynamic Green’s functions for one-, two- and three-dimensional infinite domains within the formalism of peridynamics, making use of Fourier transforms and Laplace transforms. Noting that the one-dimensional and three-dimensional cases have been previously studied by other researchers, in this paper, we develop a method to obtain convergent solutions from the divergent integrals, so that the Green’s functions can be uniformly expressed as conventional solutions plus Dirac functions, and convergent nonlocal integrals. Thus, the Green’s functions for the two-dimensional domain are newly obtained, and those for the one and three dimensions are expressed in forms different from the previous expressions in the literature. We also prove that the peridynamic Green’s functions always degenerate into the corresponding classical counterparts of linear elasticity as the nonlocal length tends to zero. The static solutions for a single point load and the dynamic solutions for a time-dependent point load are analyzed. It is analytically shown that for static loading, the nonlocal effect is limited to the neighborhood of the loading point, and the displacement field far away from the loading point approaches the classical solution. For dynamic loading, due to peridynamic nonlinear dispersion relations, the propagation of waves given by the peridynamic solutions is dispersive. The Green’s functions may be used to solve other more complicated problems, and applied to systems that have long-range interactions between material points.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
During the past forty years, it has become clear that neither distributed damage in materials nor transitions to discrete microstructural models can be adequately characterized by local constitutive relations between stress and strain tensors [1]. Simple examples show that nonlocality may arise in a homogenized model of a heterogeneous medium, even though the behavior of the constituents is modeled by conventional local theories [2]. In order to describe effects that are not captured in the local formulation, nonlocal theories involving integral formulations in continuum mechanics have been developed since the 1960s. For example, Kröner added a nonlocal integral term to the local equation of motion [3]; Eringen and Edelen proposed a theory of nonlocal elasticity represented by integral constitutive relations [4, 5]; Kunin expressed the internal forces directly by integrals of displacements. Bazant and Jirasek [1] made a comprehensive review focusing on the early nonlocal integral formulations. Recently, Silling and co-workers [6, 7] developed the nonlocal theory of peridynamics. Thereinto, according to the suggested classification by Bazant and Jirasek [1], peridynamics can be classified as a strongly nonlocal theory owing to an integral operator in the equation of motion. It reformulates the equations of classical continuum mechanics in terms of integro-differential equations instead of partial differential equations. This reformulation brings special advantages in dealing with material deformations, such as damage, cracking, and fracture problems [8–12]. A detailed description of the peridynamic theory can be found in a review article [13]. While the formulation of peridynamics has been recently applied to various topics such as thermal diffusion [14], crystal plasticity [15], fully coupled thermomechanics [16], pitting corrosion damage [17], and flow in porous media [18], the relation between peridynamics and the conventional differential formulation, and convergence of the numerical computation of peridynamics itself have also been addressed with rigorous mathematical analyses [19–23].
However, generally, it is difficult to obtain peridynamic analytical solutions owing to the integro-differential formulation. Thus, most work mentioned above is based on numerical computations. There are few closed-form analytical solutions [19, 24–28]. Silling et al. [24] firstly studied the deformation of an infinite bar subjected to a single point load. The formal solution given by Silling et al. [24] is expressed as an infinite series derived from the residue theorem. Then Weckner and Abeyaratne [25] investigated the effect of long-range forces on the dynamics of a bar, and presented the Green’s function for the one-dimensional infinite dynamic problem. Recently, Mikata [28] pointed out that both the integral formulation and the infinite series in the paper of Silling et al. [24] are divergent. Static and dynamic problems for a one-dimensional infinite bar with two concentrated point loads are analytically solved with Fourier transforms by Mikata [28]. The divergent integrals of the analytical solutions are transformed into singular solutions plus convergent integrals. The singular solutions can be expressed as generalized functions. This kind of treatment is similar to that of Weckner et al. [27]. With Fourier transforms and Laplace transforms, Weckner et al. [27] presented the three-dimensional static and dynamic Green’s functions. The static Green’s function is expressed as the sum of generalized functions and convergent integrals. But for one- and two-dimensional static problems, as will be shown in this paper, even though generalized functions can be separated from the original divergent integrals, the remaining integral parts are still divergent. Moreover, to the authors’ knowledge, the static and dynamic Green’s functions of peridynamics in an infinite two-dimensional domain have not been reported.
Green’s functions as fundamental solutions have many applications (e.g. [29]). The focus of this work is solutions of the static and dynamic Green’s functions in an infinite two-dimensional domain within the formalism of bond-based peridynamics. We also use Fourier transforms and Laplace transforms to solve the dynamic integro-differential equations. However, for the static loading, the integral directly obtained by the Fourier transform is divergent. We then obtain the analytical solution by transforming the divergent integral into three parts: a distribution, the classical solution, and a convergent integral. The classical solution is recovered in the limit of the peridynamic theory as the material nonlocal length tends to zero (\(l \rightarrow 0\)). As the above treatment is also applicable to one- and three-dimensional cases, we also include the static and dynamic Green’s functions for a one-dimensional bar and a three-dimensional infinite domain. The static Green’s function for the one-dimensional bar is expressed as convergent analytical expressions, which are different from the expressions in the paper of Silling et al. [24]. For three-dimensional cases, the final analytical expressions of the Green’s functions are expressed in forms different from those given by Weckner et al. [27]. In addition, we give numerical results for two kinds of commonly used micromodulus as examples, and the limits to the local solutions are also analyzed. The one-, two- and three-dimensional problems are solved in Sects. 2, 3 and 4, respectively. In each case, the classical limit is discussed. Examples and applications are given in Sect. 5. Section 6 draws the conclusions.
2 Green’s Functions in One Dimension
For the dynamic problem, the Green’s function expressed as an infinite series [24] has been used to deal with the initial Gauss displacement [24, 26], two concentrated forces [24, 28], and so on. However, the static Green’s function described by an infinite series is divergent, even though Mikata [28] developed a convergent solution for two concentrated forces. Thus, the convergent Green’s function for a static point force is presented in this section, and the classical limits are recovered as the nonlocal length tends to zero (\(l\rightarrow 0\)). To this end, we begin with a summary of the dynamic Green’s function.
2.1 Dynamic Loading
For one-dimensional linear bond-based peridynamics, the equation of motion of the material point \(x\) in an infinite homogeneous medium at time \(t\) is expressed as
where \(\rho \) is the density. ℋ is the neighborhood with a radius \(l\). The radius \(l\) is called the horizon in peridynamics. \(\xi =x-x'\) denotes the relative position of two material points \(x\) and \(x'\) in the reference configuration. \(b(x,t)\) is the external force, and the integral operator represents the internal force acting on the displacement field \(u(x,t)\). The micromodulus function \(C(\xi )\) can be related to the constitutive parameters of classical elasticity [6], and \(C(\xi )=C(-\xi )\). The initial condition is set as
Equation (1) with the initial condition Eq. (2) has been solved with the Fourier transform as shown in the work of Silling et al. [24]. We only summarize the results here. An overbar is used to denote the Fourier transform of a function. Thus the Fourier pair is defined as
where \(\mathrm{i}^{2}=-1\). With the above definition, the equation of motion Eq. (1) and the initial condition Eq. (2) can be written as
in which
is the peridynamic dispersion relation and
The relation between the angular frequency \(\omega \) and the wave number \(k\) is nonlinear in peridynamics, whereas it is linear in the classical elasticity. Details about the one-dimensional peridynamic dispersion relation can be found in the paper of Mikata [28]. Now Eq. (4) is a second-order ordinary differential equation with respect to \(t\). With the help of the inverse transform and the convolution theorem of the Fourier transform, the general solution takes the following form:
where
As discussed by Weckner and Abeyaratne [25], the function \(G(x,t)\) is the Green’s function for the dynamic loading in the one-dimensional infinite linear microelastic medium. Due to the symmetry of \(C(\xi )\), \(M(k)\) and \(\omega (k)\) are both even functions. The Green’s function Eq. (8) is further expressed as
From Eq. (9), we note that the Green’s function depends on the dispersion relation \(\omega (k)\), while the dispersion relation \(\omega (k)\) is determined by the micromodulus function \(C(\xi )\). It is noteworthy that the equation of motion Eq. (1) is usually considered as the longitudinal motion of a homogeneous bar. Thus the micromodulus function \(C(\xi )\) is related to the Young’s modulus \(E\) as [6]
In fact, we point out that the equation of motion Eq. (1) can be regarded as the generic equation of other one-dimensional wave motions, such as the twisting motion of a homogeneous bar, the plane compressional wave, and the plane shear wave in a homogeneous elastic medium. Therefore, the micromodulus function \(C(\xi )\) has more forms than that given in Eq. (10), and can be expressed as
where \(\varLambda \) depends on the specific wave modes, as listed in Table 1. The detailed derivation is given in Appendix A. Thus, the solution of Eq. (7) described by the Green’s function is applicable to a series of one-dimensional peridynamic wave modes.
2.2 Static Loading
The governing equation of one-dimensional static problems is
The solution is
where
in which \(\mathrm{Fp}\frac{1}{M ( k ) }\) is the Hadamard’s finite part of \(\frac{1}{M ( k ) }\), i.e., the distribution defined by [30]
where \(\varphi \) is a test function. This is because as \(k\) tends to zero, the asymptotic value of \(M(k)\) in Eq. (6) is
This means that the function \(1/M(k)\) is not integrable in any neighborhood of 0. Thus, the theory of distribution [30] is introduced in Eqs. (14) and (15).
Using the convolution theorem of the Fourier transform, Eq. (13) is expressed as
in which the function \(G(x)\) is the Green’s function in the one-dimensional infinite linear microelastic medium, when it is subjected to the body force \(b(x)=\delta (x)\), where \(\delta (x)\) is the one-dimensional Dirac function. The finite integral part of \(G ( x ) \) is
In addition, \(M ( k ) \) does not tend to zero as \(k\rightarrow +\infty \). The complete form of the Green’s function \(G ( x ) \) should be the finite part plus the singular parts at \(k\rightarrow 0\) and at \(k\rightarrow +\infty \), and can be expressed as
where
Every term in the brackets of the integrand in Eq. (19) is an even function; thus it can be rewritten as
The Green’s function \(G ( x ) \) now is decomposed into three parts: the first term is exactly equal to the classical solution; the second term is expressed by the one-dimensional Dirac function; the third term is a convergent integral representing the nonlocal effect.
It is noted that the peridynamic Green’s function has a distribution \(\delta (x)\). This naturally emerging distribution from the solution of the equation of motion does not pose a difficulty in the peridynamic integro-differential formulation. This difference between the peridynamic Green’s function and the classical one has been discussed by Weckner et al. [25]. Moreover, the sum of the last two terms in Eq. (21) tends to zero as \(l\rightarrow 0\), which will be proved below.
2.3 Relation to Classical Solutions
The classical static and dynamic Green’s functions can be obtained from Eq. (9) and Eq. (19), respectively, when \(M(k)=\varLambda k^{2}\). Thus the relation between the peridynamic and classical solutions is determined by the value of \(M ( k ) \).
When replacing \(\xi \) in Eq. (6) with \(\hat{\xi }=\xi /l\), Eq. (6) becomes
where \(\mathcal {H}_{0}\) is the unit circle. As \(l\rightarrow 0\), Eq. (22) is rewritten as
which means that the classical \(M(k)\) is recovered in the limit \(l\rightarrow 0\). To elaborate on the above limits, we consider two micromodulus functions as follows:
Case 1
Case 2
Substituting Eq. (24) and Eq. (25) into Eq. (6), we obtain
and
Using the Taylor expansion, we note
and
When \(l\rightarrow 0\), it is easy to obtain
This result is consistent with Eq. (23).
Therefore, for both static and dynamic cases, the peridynamic Green’s functions always degenerate into the classical Green’s functions as the nonlocal length tends to zero.
On the other hand, when replacing \(k\) in Eq. (9) with \(\hat{k}=kx\), Eq. (9) becomes
in which \(\omega ( \hat{k}/x ) =\sqrt{M ( \hat{k}/x ) / \rho }\). Combining with Eq. (22), we have
As \(l/x\) is an infinite small quantity, namely, the considered material point is far away from the loading point, the same method in Eq. (23) is adopted, and Eq. (32) becomes
Eq. (33) shows that as \(l/x\) is small enough, the peridynamic Green’s functions always approach the classical Green’s functions, whether \(l\) tends to zero or not. The solution of the material point far away from the loading point is not affected by the nonlocal effect of peridynamics.
3 Green’s Functions in Two Dimensions
In this section, we obtain two-dimensional dynamic and static Green’s functions which are applicable to both plane-stress and plane-strain conditions. As the nonlocal length tends to zero (\(l\rightarrow 0\)), the limits of these peridynamic Green’s functions are also discussed.
3.1 Dynamic Loading
In an infinite homogeneous plane ℬ, the peridynamic equation of motion for material point \(\boldsymbol{x}\in \mathcal {B}\) at time \(t\) is
where \(\boldsymbol{u} ( \boldsymbol{x},t ) \) and \(\boldsymbol{b} ( \boldsymbol{x},t ) \) are the displacement and body force density fields of material point \(\boldsymbol{x}\) at time \(t\), respectively. \(\boldsymbol{\xi }=\boldsymbol{x}'-\boldsymbol{x}\) is the bond vector, and \(\xi =\lVert \boldsymbol{\xi }\rVert \) represents the initial length of a bond. \(\boldsymbol{C} ( \boldsymbol{\xi } ) \) is the micromodulus tensor and satisfies \(\boldsymbol{C} ( \boldsymbol{\xi } ) =\boldsymbol{C} ( -\boldsymbol{\xi } ) =\boldsymbol{C} ^{\mathrm{T}} ( \boldsymbol{\xi } ) \). For a linear isotropic microelastic material, the micromodulus can be written as
in which the micromodulus function \(\lambda ( \xi ) \) contains all constitutive information. The micromodulus function \(\lambda ( \xi ) \) for plane-stress and plane-strain conditions can be determined by (Appendix A),
and
The initial conditions are
Under the two-dimensional Fourier transform with respect to \(\boldsymbol{x}\), the equation of motion Eq. (34) and the initial conditions Eq. (38) take the following forms:
where
Because tensor \(\boldsymbol{C}\) is symmetric and is an even function, tensor \(\boldsymbol{M}\) must be symmetric and the components of tensor \(\boldsymbol{M}\) must be real values. Thus Eq. (40) is rewritten as the following form:
The solution of tensor \(\boldsymbol{M}\) is very important to the further derivation. For the three dimensional region, Silling [6] first gave the solution of tensor \(\boldsymbol{M}\) for the special case of \(\boldsymbol{k}=\boldsymbol{e}_{1}\), where \(\boldsymbol{e}_{1}\) is a base vector of a set of orthonormal bases \(\{ \boldsymbol{e}_{1},\boldsymbol{e}_{2},\boldsymbol{e}_{3} \} \). The solution for a general case was not obtained until the work of Weckner et al. [27]. The solution was calculated by Weckner et al. [27] with a special equation, but this equation was not suitable for the two-dimensional case. Thus, we take a new approach of coordinate transformation here. We calculate the integral Eq. (41) in polar coordinates (the details are given in Appendix B) and obtain the following form:
for which
where \(\mathrm{J}_{0} ( k\xi ) \) and \(\mathrm{J}_{1} ( k \xi ) \) are the zeroth-order and first-order Bessel functions, respectively, and \(k=\lVert \boldsymbol{k}\rVert \).
Then the Laplace transform with respect to \(t\) is applied to Eq. (39) and the transformed solution is
where \(\boldsymbol{I}\) is a unit tensor. With the help of Eq. (42), we get
The inverse transform of Eq. (48) is
where \(\omega_{\bot }^{\mathrm{II}} ( k ) =\sqrt{\frac{M_{ \bot }^{\mathrm{II}} ( k ) }{\rho }}\), and \(\omega_{\Vert } ^{\mathrm{II}} ( k ) =\sqrt{\frac{M_{\Vert }^{\mathrm{II}} ( k ) }{\rho }}\). Then the solution in the \(k\)-space is obtained by the convolution theorem of Laplace transforms
With the convolution theorem of Fourier transforms, the solution is finally expressed as
in which \(\boldsymbol{G} ( \boldsymbol{x},t ) =\mathscr{F}^{-1} \{ \bar{ \boldsymbol{G}} ( \boldsymbol{k},t ) \} \) is the Green’s function for the two-dimensional dynamic problem. Its components are
with
and
where \(x=\lVert \boldsymbol{x}\rVert \) and \(a_{1,2}^{\mathrm{II}} ( kx ) =A _{1,2}^{\mathrm{II}} ( kx ) -\frac{1}{2}\). Superscript \(\mathrm{II}\) represents that the solution is for a two-dimensional region. Substituting Eqs. (51) and (52) into Eqs. (34) and (38) confirms that the equation of motion and the initial conditions are satisfied. The Green’s function (52) is suitable for both plane-stress and plane-stain conditions.
3.2 Static Loading
In the static case, the governing equation for material point \(\boldsymbol{x}\in \mathcal {B}\) is
Using the two-dimensional Fourier transform with respect to \(\boldsymbol{x}\), the governing equation (55) is
where tensor \(\boldsymbol{M} ( \boldsymbol{k} ) \) is the same as that in Eq. (40), and
Like the one-dimensional static case, \([ \boldsymbol{M} ( \boldsymbol{k} ) ] ^{-1}\) is singular at \(k=0\), and does not tend to zero as \(k\rightarrow +\infty \). The transformed solution is
where the components of \(\mathrm{Fp} [ \boldsymbol{M} ( \boldsymbol{k} ) ] ^{-1}\) are defined like that in Eq. (15) in one dimension
Similarly, the solution is obtained by the convolution theorem of Fourier transforms
in which \(\boldsymbol{G} ( \boldsymbol{x} ) \) is the Green’s function for the two-dimensional static case. Its components are
with
and
in which \(\delta^{\mathrm{II}} ( \boldsymbol{x} ) \) is the two-dimensional Dirac function and
Equation (62) also consists of three parts: the classical solution, the Dirac function, and the nonlocal effect. Substituting Eq. (63) and Eq. (62) into Eq. (61), we get the convergent Green’s function for the two-dimensional static loading. The classical two-dimensional Kelvin’s solution can be recovered as \(l\rightarrow 0\).
3.3 Relation to Classical Solutions
We examine the limits of the peridynamic Green’s functions in Eqs. (52) and (61) as \(l\rightarrow 0\). We first analyze the classical Green’s functions. Then the relation between them will be made clear.
For the two-dimensional plane-stress condition, the equation of motion for a linearly elastic and isotropic medium within the formalism of classical elasticity is
where \(\mu \) is the shear modulus and \(\nu \) is the Poisson ratio. Under the Fourier transform with respect to \(\boldsymbol{x}\), Eq. (65) becomes
in which the tensor \(\boldsymbol{M}^{c} ( \boldsymbol{k} ) \) can be expressed as
Using the same derivation process as that in Sect. 3.1, the classical Green’s function can be expressed as the forms in Eqs. (52) and (61), with \(M_{\bot }^{\mathrm{II}}\) and \(M_{\Vert } ^{\mathrm{II}}\) replaced by \(\mu \) and \(\frac{2\mu }{1-\nu }\), respectively. Therefore, we just need to discuss the limit values of \(M_{\Vert }^{\mathrm{II}}\) and \(M_{\bot }^{\mathrm{II}}\) as \(l\rightarrow 0\).
With variable substitution \(\hat{\xi }=\xi /l\), Eq. (43) and Eq. (44) become
and
As \(l\rightarrow 0\), with the Taylor expansion, \(A_{1} ( k \hat{\xi }l ) \) and \(A_{2} ( k\hat{\xi }l ) \) can be expressed as
and
Substituting the above two equations into Eqs. (68) and (69), and by dropping the high-order terms, and using coordinate inversion, we obtain
and
As \(\nu =\frac{1}{3}\) for the plane-stress condition in peridynamics, the classical parameters can be rewritten as \(\mu =\frac{3E}{8}\) and \(\frac{2\mu }{1-\nu }=\frac{9E}{8}\). This means that the limits of \(M_{\Vert }^{\mathrm{II}}\) and \(M_{\bot }^{\mathrm{II}}\) as \(l\rightarrow 0\) are equal to the classical parameters. Thus, the peridynamic Green’s functions converge to those of classical linear elasticity as \(l\rightarrow 0\). On the other hand, by the same treatment in Sect. 2.3, we can also demonstrate that the peridynamic Green’s functions also converge to classical Green’s functions as \(l/x\rightarrow 0\). We can draw the same conclusion for the plane-strain condition.
4 Green’s Functions in Three Dimensions
In this section, we adopt a method similar to that in Sect. 3, and choose different microfunctions from that in the work of Weckner et al. [27] to solve the three-dimensional Green’s functions. Moreover, we recover the classical solutions from the peridynamic solutions as \(l\rightarrow 0\), which was not analytically proved in the previous work [27].
4.1 Dynamic Loading
Now we consider the three-dimensional dynamic problem in an infinite homogeneous body \(\mathcal {V}\). The peridynamic equation of motion for material point \(\boldsymbol{x}\in \mathcal {V}\) at time \(t\) is
with
in which the micromodulus function \(\lambda ( \xi ) \) satisfies
The initial conditions are
Under three-dimensional Fourier transforms with respect to \(\boldsymbol{x}\), the equation of motion Eq. (74) and the initial conditions Eq. (77) are converted into
where
Following Sect. 3.1, we calculate the integral in Eq. (79) in polar coordinates (the details are given in Appendix B) and obtain the following form:
for which
Superscript \(\mathrm{III}\) represents that the solution is for the three-dimensional body.
With the same process of derivation, the solution for Eq. (74) with initial conditions Eq. (77) is obtained as follows:
in which \(\boldsymbol{G} ( \boldsymbol{x},t ) \) is the Green’s function for the three-dimensional dynamic loading. Its components are
with
and
where \(a_{1,2}^{\mathrm{III}} ( kx ) =A_{1,2}^{\mathrm{III}} ( kx ) -\frac{1}{3}\). The peridynamic solution in Eq. (85) and the Green’s function in Eq. (86) are the same as those given by Weckner et al. [27].
4.2 Static Loading
The governing equation for material point \(\boldsymbol{x}\in \mathcal {V}\) is
Similarly, with three-dimensional Fourier transforms, the solution is obtained
in which \(\boldsymbol{G} ( \boldsymbol{x} ) \) is the Green’s function for the three-dimensional body. Its components are expressed as
with
and
Eq. (92) is divergent because the integrand does not tend to zero as \(k\rightarrow +\infty \).
Thus, we rewrite Eq. (92) as
in which \(\delta^{\mathrm{III}} ( \boldsymbol{x} ) \) is the three-dimensional Dirac function and
Eq. (94) also consists of a Dirac function and a convergent integral. Substituting Eqs. (93) and (94) into Eq. (91) leads to the convergent Green’s function for the three-dimensional static loading of an infinite body. The solution is the same as that given by Weckner et al. [27], though obtained in a different way.
4.3 Relation to Classical Solutions
The equation of motion of linear elasticity is
Thus, the classical Green’s functions can be expressed as the forms of Eqs. (86) and (91), with \(M_{\bot }^{\mathrm{III}}\) and \(M_{\Vert }^{\mathrm{III}}\) replaced by \(\mu \) and \(\frac{2\mu ( 1-\nu ) }{1-2\nu }\), respectively. For three-dimensional deformation, the Poisson ratio \(\nu =\frac{1}{4}\) in peridynamics, in which case \(\mu =\frac{2E}{5}\) and \(\frac{2\mu ( 1-\nu ) }{1-2 \nu }=\frac{6E}{5}\).
\(A_{1}^{\mathrm{II}} ( k\xi ) \) and \(A_{2}^{\mathrm{II}} ( k \xi ) \) can be expanded as
and
By coordinate transforms in Sect. 3.3, \(M_{\Vert }^{ \mathrm{III}}\) and \(M_{\bot }^{\mathrm{III}}\) as \(l\rightarrow 0\) can be evaluated as the following forms:
and
We readily find that the parameters \(\mu =\frac{2E}{5}\) and \(\frac{2\mu ( 1-\nu ) }{1-2\nu }=\frac{6E}{5}\) in the classical Green’s function are recovered from the peridynamic counterparts \(M_{\Vert }^{\mathrm{III}}\) and \(M_{\bot }^{\mathrm{III}}\) as \(l\rightarrow 0\). Thus, for three dimensional dynamic and static cases, the peridynamic Green’s functions always degenerate into those of classical elasticity as \(l\rightarrow 0\). At the same time, by the same treatment in Sect. 2.3, we can also demonstrate that the peridynamic Green’s functions also converge to classical Green’s functions as \(l/x\rightarrow 0\).
5 Examples
5.1 Static Solutions for a Single Point Load
Static solutions for a single point load will be examined in this section. Two kinds of commonly used microfunction are used to show the influence of the microfunction on the peridynamic results. The first kind is a constant and invariable with the distance between the material points, and the second is a normal distribution [31]. The material parameters in the microfunctions can be calculated by equations relating the peridynamic parameters to conventional elastic constants, for example, Eq. (11) for one dimension, Eq. (36) or Eq. (37) for two dimensions and Eq. (76) for three dimensions.
5.1.1 One-Dimensional Static Solution
We consider an infinite bar subjected to a single point load \(b ( x ) =\frac{P}{A}\delta ( x ) \) in the longitudinal direction. \(P\) represents the magnitude of the force and \(A\) is the cross section of the bar. The micromoduli for the two kinds of microfunction are calculated in Eqs. (24) and (25). The values of \(M ( k ) \) are calculated in Eqs. (26) and (27). Inserting \(M ( k ) \) into the static Green’s function in Eq. (19) eventually leads to static displacements as follows:
Case 1
Case 2
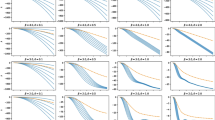
The normalized displacements for different values of the nonlocal length \(l\) are plotted in Fig. 1(a) and Fig. 2(a), for the two kinds of microfunction, without including the Dirac function. The results of numerical integrations, namely, the third terms on the right hand side of Eqs. (101) and (102), for the two cases are presented in Fig. 1(b) and Fig. 2(b).

One-dimensional static solutions of Case 1 (Color figure online)

One-dimensional static solutions of Case 2 (Color figure online)
The classical displacement \(u ( x ) = - \frac{P\vert x\vert }{2EA}\) is also shown in Fig. 1(a) and Fig. 2(a). For material points away from the loading point, the peridynamic displacements agree with the local solutions and are not affected by nonlocal factors such as the form of the microfunction and the value of the nonlocal length \(l\). At these material points, the values of the integrals approach zero (Fig. 1(b) and Fig. 2(b)). However, in the region within a radius of about \(2l\) around the loading point, the displacements are dependent on the nonlocal factors. The nonlocal effect disappears and the peridynamic displacements converge to the classical solutions as \(l\rightarrow 0\). The displacement curve of case 2 is smoother than that of case 1 which has discontinuities at the position of about \(l\) from the loading point, because the microfunction Eq. (24) is truncated at the boundary of the nonlocal neighborhood. Finally, it should be mentioned that the singular part of both cases diminishes with the rate of \(l^{2}\) when \(l\rightarrow 0\).
5.1.2 Two-Dimensional Static Solution
A plane-stress problem is investigated. An infinite plate with thickness \(h_{0}\) is subjected to a single point load. Assume that the single point load is parallel to the base vector \(\boldsymbol{e}_{j}\) and expressed as \(\boldsymbol{b} ( \boldsymbol{x} ) =\frac{P}{h_{0}}\delta ( \boldsymbol{x} ) \boldsymbol{e}_{j}\). The classical solution is the well-known two-dimensional Kelvin’s solution
where the subscript \(( j ) \) represents that the displacement is resulted from the load component parallel to the base vector \(\boldsymbol{e}_{j}\). The peridynamic solution can be determined from Eq. (60) and expressed as
Again, two kinds of microfunction determined by Eq. (36) are considered:
Case 1
Case 2
where \(\xi =\lVert \boldsymbol{\xi }\rVert \) represents the distance between two material points. Without including the Dirac function, the peridynamic displacements along with the classical solutions are shown in Fig. 3 and Fig. 4.

Two-dimensional static solutions of Case 1 (Color figure online)

Two-dimensional static solutions of Case 2 (Color figure online)
The displacements of the two-dimensional case have the same features as those of the one-dimensional case. However, it is interesting to note that for any nonzero horizon, the peridynamic displacement \(u_{ \mathrm{B}}^{\mathrm{II}}\) is always equal to zero at the loading point, whereas the classical displacement \(u_{\mathrm{B}}^{\mathrm{II}}\) is a nonzero constant.
5.1.3 Three-Dimensional Static Solution
Weckner et al. [27] used an exponential microfunction \(\lambda ( \xi ) =\frac{8E}{\pi^{3/2}l^{7}} \mathrm{e}^{-\frac{\xi^{2}}{{l}^{2}}} \). In this paper, we use different microfunctions:
Case 1
Case 2
When \(\boldsymbol{b} ( \boldsymbol{x} ) =P\delta ( \boldsymbol{x} ) \boldsymbol{e}_{j}\), the peridynamic results are obtained from Eq. (90) as follows:
The classical solution (Kelvin’s solution) is
All peridynamic results in Fig. 5 and Fig. 6 converge to the classical solutions as \(l\rightarrow 0\). The nonlocal effect is limited to the region near the loading point.

Three-dimensional static solutions of Case 1 (Color figure online)

Three-dimensional static solutions of Case 2 (Color figure online)
5.2 Dynamic Solutions for a Time-Dependent Point Load
The peridynamic transient response of a bar has been studied by previous researchers, such as the initial value problem with the initial Gauss displacement [24, 26], and the dynamic response subject to a pair of self-equilibrated point loads [27, 28].
In this paper, we consider the case when the bar is at rest for \(t<0\) and is subject to a Ricker pulse at the origin for \(t>0\),
in which \(f_{p}\) is the peak frequency.
Inserting Eq. (111) into Eq. (7) leads to the solution for this problem
We introduce the normalization
where \(c_{0}=\sqrt{E/\rho }\) and \(L=\sqrt{A}\). Let \(f_{p}=hc_{0}/L\). The normalized solution of displacement can be written as
in which the normalized Green’s function is
where the one-dimensional normalized dispersion relation is
For example, \(\tilde{\omega } ( \tilde{k} ) =\tilde{k}\) in classical elasticity. Combining Eqs. (114) and (116), the normalized classical displacement is
For the microfunction in Eq. (25), and \(h=2\), the normalized displacements of peridynamics and the classical results are shown in Fig. 7. The normalized nonlocal length is \(\gamma =l/L\). The displacement distributions for different values of \(\gamma \) at time \(T=1\) are shown in Fig. 7(a), while the displacements at position \(X=1\) are plotted in Fig. 7(b).

Dynamic solutions for a time-dependent point load: (a) Displacement distributions at \(T=1\) and (b) Displacements at \(X=1\) (Color figure online)
The peridynamic displacements exhibit decaying oscillations, as found by Weckner and Abeyaratne [25]. The amplitude of oscillations approaches zero as \(\gamma \rightarrow 0\). Oscillations exist near \(X=0.5\) in Fig. 7(a), whereas oscillations appear after \(T=1.25\) in Fig. 7(b). These phenomena mean that the decaying oscillations only exist in the wave tail and not appear in the wave front. This feature is resulted from the peridynamic nonlinear dispersion relation. Due to the nonlinear dispersion relation, the wave speed of a high frequency wave is smaller than that of a low frequency wave. Therefore, high frequency waves fall behind and lead to oscillations as shown in Figs. 7(a) and (b). On the contrary, the linear dispersion relation of classical theory ensures the same wave speed for waves of different frequencies. Finally, the peridynamic results fall behind the classical solutions as shown in both Figs. 7(a) and (b), because the wave speed given by peridynamics is always smaller than that given by the classical theory, as discussed in the papers of Mikata [28]. As \(\gamma \rightarrow 0\), these features will disappear and the peridynamic solutions degenerate into the classical solutions.
6 Conclusions
We present solutions of the static and dynamic Green’s functions for one-, two- and three-dimensional infinite domains within the formalism of peridynamics. For static Green’s functions, a new method is developed in this paper to obtain convergent integrals in the final expressions of the functions. The Green’s functions are all expressed as conventional solutions plus Dirac functions, and convergent nonlocal integrals. Therefore, while the Green’s functions for the two-dimensional domain are newly obtained, those for the one and three dimensions are expressed in forms different from the previous solutions in the literature. We also show that the peridynamic Green’s functions always degenerate into the corresponding classical Green’s functions as the nonlocal length tends to zero. As examples, the static solutions for a single point load and the dynamic solutions for a time-dependent point load are analyzed. We find that for static loading, the nonlocal effect is limited to the neighborhood of the loading point. The displacement field far away from the loading point approaches the classical solution. For dynamic loading, due to peridynamic nonlinear dispersion relations, the propagation of waves given by the peridynamic solutions is dispersive. Apart from applications to infinite domains, the Green’s functions in classical elasticity have been used to develop the Betti’s reciprocal theorem, and boundary integral equations to solve problems of finite domains. Thus, in Appendix C, we derive the Betti’s reciprocal theorem, the Somigliana formula and the boundary integral equation in peridynamics, which involve the peridynamic Green’s functions. As pointed out by Weckner et al. [27], the Green’s functions can be used to solve other more complicated problems. These functions may also be applied to systems that have long-range interactions between material points.
References
Bazant, Z.P., Jirasek, M.: Nonlocal integral formulations of plasticity and damage: survey of progress. J. Eng. Mech. 128(11), 1119–1149 (2002)
Silling, S.A.: Origin and effect of nonlocality in a composite. J. Mech. Mater. Struct. 9(2), 245–258 (2014)
Kröner, E.: Elasticity theory of materials with long range cohesive forces. Int. J. Solids Struct. 3, 731–742 (1967)
Eringen, A.C.: Linear theory of nonlocal elasticity and dispersion of plane-waves. Int. J. Eng. Sci. 10(5), 425–435 (1972)
Eringen, A.C., Edelen, D.G.B.: Nonlocal elasticity. Int. J. Eng. Sci. 10(3), 233–248 (1972)
Silling, S.A.: Reformation of elasticity theory for discontinuities and longrange force. J. Mech. Phys. Solids 48(1), 175 (2000)
Silling, S.A., Epton, M., Weckner, O., Xu, J., Askari, E.: Peridynamic states and constitutive modeling. J. Elast. 88(2), 151–184 (2007)
Gerstle, W., Sau, N., Silling, S.A.: Peridynamic modeling of concrete structures. Nucl. Eng. Des. 237(12–13), 1250–1258 (2007)
Xu, J., Askari, A., Weckner, O., Silling, S.: Peridynamic analysis of impact damage in composite laminates. J. Aerosp. Eng. 21(3), 187–194 (2008)
Kilic, B., Agwai, A., Madenci, E.: Peridynamic theory for progressive damage prediction in center-cracked composite laminates. Compos. Struct. 90(2), 141–151 (2009)
Oterkus, E., Madenci, E.: Peridynamic analysis of fiber-reinforced composite materials. J. Mech. Mater. Struct. 7(1), 45–84 (2012)
Taylor, M., Steigmann, D.J.: A two-dimensional peridynamic model for thin plates. Math. Mech. Solids 20(8), 998–1010 (2015)
Silling, S.A., Lehoucq, R.B.: Peridynamic theory of solid mechanics. Adv. Appl. Mech. 44(44), 73–168 (2010)
Oterkus, S., Madenci, E., Agwai, A.: Peridynamic thermal diffusion. J. Comput. Phys. 265, 71–96 (2014)
Sun, S., Sundararaghavan, V.: A peridynamic implementation of crystal plasticity. Int. J. Solids Struct. 51(19–20), 3350–3360 (2014)
Oterkus, S., Madenci, E., Agwai, A.: Fully coupled peridynamic thermomechanics. J. Mech. Phys. Solids 64, 1–23 (2014)
Chen, Z., Bobaru, F.: Peridynamic modeling of pitting corrosion damage. J. Mech. Phys. Solids 78, 352–381 (2015)
Jabakhanji, R., Mohtar, R.H.: A peridynamic model of flow in porous media. Adv. Water Resour. 78, 22–35 (2015)
Emmrich, E., Weckner, O.: Analysis and numerical approximation of an integrodifferential equation modeling non-local effects in linear elasticity. Math. Mech. Solids 12(4), 363–384 (2007)
Gunzburger, M., Lehoucq, R.B.: A nonlocal vector calculus with application to nonlocal boundary value problems. Multiscale Model. Simul. 8(5), 1581–1598 (2010)
Zhou, K., Du, Q.: Mathematical and numerical analysis of linear peridynamic models with nonlocal boundary conditions. SIAM J. Numer. Anal. 48(5), 1759–1780 (2010)
Du, Q., Zhou, K.: Mathematical analysis for the peridynamic nonlocal continuum theory. ESAIM: Math. Model. Numer. Anal. 45(2), 217–234 (2011)
Du, Q., Gunzburger, M., Lehoucq, R.B., Zhou, K.: A nonlocal vector calculus, nonlocal volume-constrained problems, and nonlocal balance laws. Math. Models Methods Appl. Sci. 23(3), 493–540 (2013)
Silling, S.A., Zimmermann, M., Abeyaratne, R.: Deformation of a peridynamic bar. J. Elast. 73(1–3), 173–190 (2003)
Weckner, O., Abeyaratne, R.: The effect of long-range forces on the dynamics of a bar. J. Mech. Phys. Solids 53(3), 705–728 (2005)
Emmrich, E., Weckner, O.: The peridynamic equation and its spatial discretisation. Math. Model. Anal. 12(1), 17–27 (2007)
Weckner, O., Brunk, G., Epton, M.A., Silling, S.A., Askari, E.: Green’s functions in non-local three-dimensional linear elasticity. Proc. R. Soc. A, Math. Phys. Eng. Sci. 465(2111), 3463–3487 (2009)
Mikata, Y.: Analytical solutions of peristatic and peridynamic problems for a 1d infinite rod. Int. J. Solids Struct. 49(21), 2887–2897 (2012)
Pan, E., Chen, W.: Static Green’s Functions in Anisotropic Media. Cambridge University Press, New York (2015)
Schwartz, L.: Théorie des Distributions. Hermann, Paris (1966)
Kilic, B.: Peridynamic theory for progressive failure prediction in homogeneous and heterogeneous materials. PhD thesis, University of Arizona (2008)
Oterkus, E.: Peridynamic theory modeling three-dimensional damage growth in metallic and composite structures. PhD thesis, University of Arizona (2010)
Du, Q., Gunzburger, M., Lehoucq, R.B., Zhou, K.: Analysis and approximation of nonlocal diffusion problems with volume constraints. SIAM Rev. 54(4), 667–696 (2012)
Lehoucq, R.B., Silling, S.A.: Force flux and the peridynamic stress tensor. J. Mech. Phys. Solids 56(4), 667–696 (2008)
Acknowledgements
The work is supported by the National Natural Science Foundation of China under Grant 11521202. The authors thank the anonymous reviewers whose insightful comments and suggestions improved the technical content of this work. The authors also thank Professors Minzhong Wang, Kefu Huang and Shaoqiang Tang of Peking University for helpful discussions.
Author information
Authors and Affiliations
Corresponding author
Additional information
An erratum to this article is available at http://dx.doi.org/10.1007/s10659-016-9602-5.
Appendices
Appendix A: Peridynamic Material Parameters
Peridynamic material parameters can be determined by equating the strain energy density from the peridynamic theory to that of classical continuum theory [32]. By this approach (following [32]), the peridynamic parameters for one-dimensional and two-dimensional domains are derived as follows.
1.1 A.1 PD Material Parameters for One-Dimensional Deformation
The peridynamic material parameters can be determined by considering an infinitely long bar subjected to a uniform deformation of \(s=\zeta \). This uniform deformation can be a stretch, a torsion or a shear. The micropotential for this loading is
Thus, the peridynamic strain energy density can be expressed as
For the same deformation condition, the strain energy density based on the classical linear theory is
where \(\varLambda \) is the classical material parameter as listed in Table 1. By equating the strain density Eq. (A.2) to Eq. (A.3), the peridynamic material parameters can be determined by the following equation:
1.2 A.2 PD Material Parameters for Two-Dimensional Deformation
In an infinite domain, the displacements of material points \(\boldsymbol{x}'\) and \(\boldsymbol{x}\) are represented by \(\boldsymbol{u}'\) and \(\boldsymbol{u}\), respectively. The relative position vector is \(\boldsymbol{\xi }=\boldsymbol{x}'- \boldsymbol{x}\) and the relative displacement vector is \(\boldsymbol{\eta }=\boldsymbol{u}'- \boldsymbol{u}\). Then the micropotential can be evaluated as
The PD material parameters for two-dimensional plane-strain or plane-stress deformation can be determined by considering two different loading conditions. We take the derivation of the parameters for the plane-stress deformation as an example.
In the first loading condition, an isotropic expansion is applied to an infinite domain. In other words, all PD bonds is subjected to a uniform stretch \(s=\zeta \), that is, \(\boldsymbol{\eta }=\zeta \boldsymbol{\xi }\) for all the PD bonds. Using Eq. (A.5) and Eq. (35), the corresponding micropotential is equal to
The peridynamic strain energy density for this deformation can be evaluated as
Based on linear elasticity, the strain energy density becomes
The equality of the two quantities leads to the following relation
In the second loading condition, an infinite domain is subjected to a pure shear loading of \(\gamma_{xy}=\zeta /2\), that is, all PD bonds are subjected to stretches of \(\varepsilon_{xx}=\zeta \), \(\varepsilon_{yy}=- \zeta \). For material points \(\boldsymbol{x}'\) and \(\boldsymbol{x}\), the relative displacement under this loading is \(u'_{x}-u_{x}=\zeta \xi_{x}\) and \(u'_{y}-u_{y}=-\zeta \xi_{y}\). Assume that the angle between the relative position vector \(\boldsymbol{\xi }\) and the \(x\)-axis is \(\theta \). The relative displacement vector can be expressed as
Due to \(\xi_{x}=\xi \cos \theta \) and \(\xi_{y}=\xi \sin \theta \), Eq. (A.10) becomes
By substituting Eq. (A.10) into Eq. (A.5), the micropotential for this pure shear deformation is
Then the peridynamic strain energy density is
The strain energy density of classical theory is
Equating Eq. (A.13) to Eq. (A.14) leads to
Combining Eq. (A.9) with Eq. (A.15) results in \(\nu =\frac{1}{3}\) and
As for plane-strain deformation, the PD parameters can be obtained with the same derivation process through replacing \(\nu \) with \(\frac{ \nu }{1-\nu }\) and \(E\) with \(\frac{E}{1-\nu^{2}}\). Thus, the parameters for the plane-strain deformation satisfy \(\nu =\frac{1}{4}\) and
Appendix B: Calculation of Tensor \(M( \boldsymbol{k}) \)
We need to calculate the following two tensors:
and
For the second tensor, Silling [6] first gave the solution in the special case of \(\boldsymbol{k}=\boldsymbol{e}_{1}\), and the solution for the general case has also been obtained by Weckner et al. [27]. The approach of Weckner et al. [27] is not suitable for the first tensor, so it has not been calculated. Now we adopt a new method to solve the second tensor in spherical coordinates. Then the first tensor can be solved in polar coordinates in the same way.
Inspired by the solutions of Silling [6], we find that the tensor \(M ( \boldsymbol{k} ) \) is easily obtained when the direction of vector \(\boldsymbol{k}\) is parallel to any of the base vectors of an orthonormal basis \(\{ \boldsymbol{e}_{1},\boldsymbol{e}_{2},\boldsymbol{e}_{3} \} \). Therefore, by coordinate transformation, we establish a new orthonormal basis \(\{ \boldsymbol{e}'_{1},\boldsymbol{e}'_{2},\boldsymbol{e}'_{3} \} \) and make the new base vector \(\boldsymbol{e}'_{1}\) parallel to the vector \(\boldsymbol{k}\). The new orthonormal basis can be expressed as
where
The components of the vector \(\boldsymbol{\xi }\) in the two sets of orthonormal bases satisfy the following relations:
We first calculate the component \(M_{11}\) as follows
where
and
Eq. (B.5) has been used in the above derivation. \(M_{\Vert } ^{\mathrm{III}}\) and \(M_{\bot }^{\mathrm{III}}\) can be easily calculated, as shown by Silling [6]. Similarly, the other components are calculated and the component form of tensor \(\boldsymbol{M} ( \boldsymbol{k} ) \) is finally expressed as
for which
For the first tensor in (B.1), the above method is adopted and a new orthonormal basis \(\{ \boldsymbol{e}'_{1},\boldsymbol{e}'_{2} ) \) is established with \(\boldsymbol{e}'_{1}\) parallel to the vector \(\boldsymbol{k}\). The component form of the tensor in (B.1) is finally given as
for which
Appendix C: Betti’s Reciprocal Theorem, Somigliana Formula and Boundary Integral Equation in Peridynamics
By the definitions of a nonlocal divergence operator and a nonlocal gradient operator in [33], and the concept of peridynamic stress tensor in [34], we can obtain
in which \(\boldsymbol{u}\) and \(\boldsymbol{v}\) are any vector fields; \(\tau \) is the surface traction due to the vector field \(\boldsymbol{u}\) or \(\boldsymbol{v}\). \(\varOmega \) is the reference configuration of a closely bounded body with the boundary \(\partial \varOmega \). ℒ represents the peridynamic linear operator
Eq. (C.1) is the Betti’s reciprocal theorem in peridynamics. The derivation is as follows.
The nonlocal divergence operator \(\mathcal{D}\) on \(\boldsymbol{\beta}\) is defined as [33]
in which \(\boldsymbol{\beta}(\boldsymbol{x},\boldsymbol{x}')\) is a tensor, and \(\boldsymbol{\alpha}\) is an antisymmetric vector, i.e., \(\boldsymbol{\alpha}(\boldsymbol{x}',\boldsymbol{x}) = -\boldsymbol{\alpha}(\boldsymbol{x}, \boldsymbol{x}')\). The adjoint operator corresponding to \(\mathcal{D}\) is defined as [33]
If \(\boldsymbol{\beta}\) is a second-order tensor, based on (C.3) and (C.4), there is
For linear elasticity in peridynamics, \(\boldsymbol{\beta} (\boldsymbol{x}, \boldsymbol{x}')\) is expressed as \(\boldsymbol{\beta} (\boldsymbol{x}, \boldsymbol{x}') = \boldsymbol{\varTheta}: \mathcal{D}^{*}(\boldsymbol{u})\). \(\boldsymbol{\varTheta}\) is a fourth-order tensor satisfying \(\boldsymbol{\varTheta} (\boldsymbol{x}, \boldsymbol{x}') = \boldsymbol{\varTheta} (\boldsymbol{x}', \boldsymbol{x})\) with the symmetry \({\varTheta}_{ijkl} = {\varTheta}_{klij} = {\varTheta}_{jikl} = {\varTheta}_{ijlk}\), which is similar to the classical stiffness tensor. Then
in which the symmetry of \(\boldsymbol{\varTheta}\) has been used. Comparing Eq. (C.6) with Eq. (C.2), we can get
where
with \(\boldsymbol{\xi}= \boldsymbol{x}' - \boldsymbol{x}\). Thus, the linear elastic micromodulus Eq. (75) is retrieved by choosing
The peridynamic force flux vector or surface traction at a point \(\boldsymbol{x}\) is given by [34]
in which \(\boldsymbol{\nu}(\boldsymbol{x})\) is the peridynamic stress tensor defined in [34], and \(\boldsymbol{n}\) denotes the unit normal vector of a plane. It is proved in [34] that
where \(\boldsymbol{\nu}(\boldsymbol{u})\) represents the stress field corresponding to the displacement field \(\boldsymbol{u}\). Combining Eqs. (C.7) and (C.11), we can obtain the following relation by the Gauss theorem:
For any displacement vector filed \(\boldsymbol{v}\), we can get
where Eqs. (C.5), (C.7) and (C.12) have been used. Exchanging \(\boldsymbol{v}\) and \(\boldsymbol{u}\) leads to
Due to the symmetry of the last term of Eq. (C.13) or Eq. (C.14) with respect to \(\boldsymbol{u}\) and \(\boldsymbol{v}\), subtracting Eq. (C.13) from Eq. (C.14) leads to the Betti’s reciprocal theorem in Eq. (C.1).
In the Betti’s reciprocal theorem Eq. (C.1), let \(\boldsymbol{u}\) be the Green’s function of the infinite domain, that is,
The superscript \(K\) denotes the direction of the point force. Substituting Eq. (C.15) into Eq. (C.1) and changing \(\boldsymbol{x}_{0}\) to \(\boldsymbol{x}\) lead to the Somigliana formula of peridynamics,
in which \(\boldsymbol{e}^{K}\) is the base vector in the direction of the point force, and the static governing equation \(\mathcal{L}\boldsymbol{u}+\boldsymbol{b} = 0\) has been used.
If the point \(\boldsymbol{x}\) is on the smooth boundary \(\partial\varOmega\), the integral \(\int_{\varOmega} (\boldsymbol{u}\cdot \mathcal{L}\boldsymbol{v})\mathrm{d}V\) is equal to half of that when the point is not on the boundary. Thus the boundary integral equation in peridynamics is
From Eq. (C.17), the unknown displacement \(\boldsymbol{u}\) on the boundary can be calculated from the given traction \(\boldsymbol{\tau}\) on the boundary; if the traction \(\boldsymbol{\tau}\) is unknown, it can be calculated from the given displacement \(\boldsymbol{u}\). Then, using the determined boundary displacement and traction, one can obtain the displacement field in the region \(\varOmega\) by the Somigliana formula (C.16).
Rights and permissions
About this article

Cite this article
Wang, L., Xu, J. & Wang, J. Static and Dynamic Green’s Functions in Peridynamics. J Elast 126, 95–125 (2017). https://doi.org/10.1007/s10659-016-9583-4
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10659-016-9583-4