
Abstract
The structure of ecological communities is often thought to be strongly influenced by population interactions. The interactions are often labeled as bottom-up and top-down control. Previous approaches to identify these processes often assume each population in the community is itself regulated. Therefore, each time series follows a stationary process. However, complex community structure and a lack of regulation in an individual population can result in inappropriate inferences based on traditional statistical approaches. Here, we introduce a statistical framework to analyze potentially non-stationary time series that are collectively regulated. We demonstrate the method with catch-per-unit-effort time series data of selected populations in the Gulf of Mexico. In the Gulf, we found that most of the time series data, which span 26 years, were non-stationary, thus individually unregulated. Species interaction patterns were location-dependent, but where brown shrimp interacted significantly with other species, we identified significant bottom-up forcing. On the other hand, we find almost no evidence of top-down forcing throughout the study areas.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The identification of forces that regulate the dynamics of ecological communities has important implications for both theory (Hairston et al. 1960; Paine 1980; Oksanen et al. 1981; Hunter and Price 1992; Strong 1992; Mutshinda et al. 2009) and management (Rabalais et al. 2002; Smith et al. 2010). These forces include environmental stochasticity, demographic stochasticity and density-dependent regulation (Lande et al. 2003; Wilson and Lundberg 2006). In this paper, we restrict our attention to density-dependent regulation among “seemingly” unregulated populations. We use the word “seemingly” because although populations may be regulated in the long run, they do not appear to be regulated statistically when time series are short. From such data, we try to identify two types of population interactions, top-down and bottom-up controls. A top-down control is herein defined as one where the consumer population abundance regulates the abundance of its resource population, and a bottom-up control is defined as one where the abundance of the resource population regulates that of its consumer. The interaction between two populations may include both trophic and non-trophic effects.
Empirical approaches to identify bottom-up and top-down processes in multi-species communities commonly involve correlation analyses of time series data on abundance indices, e.g., biomass, or catch-per-unit-effort (CPUE; Shiomoto et al. 1997; Worm and Myers 2003; Frank et al. 2005; Laundré et al. 2014). This method associates top-down forcing with a negative correlation between time series of consumer and resource populations, and bottom-up forcing with a positive correlation between the two. However, both the non-stationarity in the time series of community dynamics and the inability to observe all the interacting species pose serious problems in making appropriate inferences regarding community dynamics as described below.
The prevalence of non-stationarity in ecological and fisheries data is one problem inherent in the analysis of population time series (Steele 1985; Pimm and Redfearn 1988; Inchausti and Halley 2001; Stergiou 2002; Halley and Stergiou 2005; Wilberg and Bence 2006; Niwa 2007; Rouyer et al. 2008; Knape and De Valpine 2012). Non-stationarity often violates model assumptions and produces spurious results. The correlations among non-stationary time series are spurious in the sense that the estimated coefficients are statistically significant when there are no real relationships among variables (inflated type I error rate). For example, in the analysis of fisheries time series data, spurious results are often produced by correlating cumulative-sum (CUSUM)-transformed variables because the CUSUM transformation generates non-stationary time series from stationary time series (Cloern et al. 2012).
One approach for dealing with non-stationary time series is to model them as unit-root processes (Enders 2008). A time series is considered to have a unit-root when it can be made stationary by taking a first difference. The most common unit-root processes in the ecology and fisheries literature are random walks. The time series produced by first differencing a random walking time series is white noise, which is stationary (note that the first difference of a unit-root time series is not necessarily a white noise sequence). The lag-0 autocovariance for a random walk process is not stationary and it increases over time. Random walk process has a power spectrum that approaches infinity with decreasing frequency (spectral reddening). These features are commonly observed in fisheries and other population time series (Steele 1985; Pimm and Redfearn 1988; Inchausti and Halley 2001; Stergiou 2002; Halley and Stergiou 2005; Niwa 2007). This suggests the appropriateness to model each univariate non-stationary population time series as a unit-root process.
Persistent natural populations should show evidence of regulation in the long term historic trends of population abundances, whether they are regulated towards an equilibrium point or an equilibrium zone (Strong 1986; Krebs et al. 1994; Murdoch 1994). Their population time series are expected to be stationary in the long run. However, regulation may not be evident in short time series, especially if we only deal with single time series. For example, the existence of an equilibrium point or equilibrium zone was questioned by Strong (1986) in the dynamics of some populations, and the phenomenon of a lack of density dependence in persistent populations was coined “vague” density dependence. However, it is generally acknowledged that density dependence is necessary for population regulation (Murdoch 1994). Many factors have been considered as potential causes of the density “vagueness” phenomenon, which include the mismatch of the spatial scale between the analysis and the ecological process (Ray and Hastings 1996), the lack of statistical power of statistical tests (Knape and de Valpine 2012), and the short length of time series data. Here, we explore the situation when there exists an equilibrium zone within which the population abundance is weakly regulated. A relatively short observation of the dynamics would reveal no or insufficient information on population regulation to conclude density dependence. Therefore, when we have non-stationary time series, instead of assuming each population is individually regulated, we test for stationarity with two or more non-stationary time series together. When such a relation is identified, it is included in the further analysis to investigate population interactions.

Diagram showing an example of three-species interactions. This bottom-up driven community has two trophic levels. Each circle represents a population, and arrows represent population interactions and the direction of that interaction, e.g., the arrow running from population V to population \(P_1\) denotes a positive numerical response from the resource to the consumer population, and this interaction is unilateral. The two consumer populations at the higher trophic level are competitors for available resources. The sign at the left hand side of each circle represents one scenario where a spurious inference could arise from the correlation method. The gray area denotes the population not observed, or excluded from the model formulation, and the white area denotes available data. See the main text for details
The other problem in identifying bottom-up and top-down forcing is that, invariably, analyses are performed on a subset of the trophic web and inferences must be made based on our knowledge of a partially-observed system (Stenseth et al. 1997). Furthermore, trophic “cross-links” (Paine 1980) can act as indirect pathways to produce unexpected indirect effects in ecological communities (Wootton 1994). Problems resulting from the inability to observe potentially important species interactions can be illustrated conceptually by a hypothetical ecological community with two consumers and one common resource denoted by \(P_1\), \(P_2\) and V (Fig. 1). In this example, consumer and resource abundances in a bottom-up forced community could be either positively correlated, negatively correlated or uncorrelated. \(P_1\) and \(P_2\) compete, with \(P_1\) being competitively superior to \(P_2\), and both \(P_1\) and \(P_2\) are affected by changes in V (bottom-up). If \(P_2\) can be observed, but not \(P_1\), and the positive impact of the bottom-up forcing is weaker than the negative impact from competition with \(P_1\), then fluctuations in V and \(P_2\) will be correlated negatively, leading to the spurious inference of top-down forcing. An example of 3-species indirect facilitation, in which there was a positive indirect relation between a keystone predator and a consumer population, has been reported in a freshwater benthic community by Holomuzki et al. (2010). Thus, the identification of bottom-up versus top-down forcing of a food web based on the sign of correlation coefficient is difficult, if not impossible. However, the direction of the effect of species interaction does not change under indirect species interactions, e.g., in the above example, a change in the resource population drives a change in the consumer population, whether positive or negative. This example illustrates the importance of using a Granger causality based method (Granger 1969; Detto et al. 2012), rather than using the sign of the correlation coefficient. Granger causality is a statistical concept based on prediction. If variable x helps the prediction of variable y, then x causes y in the sense of Granger causality. In this example, although the correlation between populations V and \(P_2\) is negative, V still causes \(P_2\) because knowing the time series of population V improves the prediction of the time series of population \(P_2\) through the species interaction. Here, we define the link between statistical model and top-down and bottom-up hypotheses as following. If the resource population time series improves the prediction of its consumer population time series, we say there is a bottom-up effect; similarly, if the consumer population time series improves the prediction of its resource population time series, we say there is a top-down effect. This interpretation is the same as the one used in the literature (Ives et al. 2003). However, we here introduce the co-integration term, which allows us to model non-stationarity.
In the sections that follow, we describe a new practical approach to identify bottom-up and top-down control, which overcomes the statistical difficulties associated with the non-stationarity of ecological time series data and also reduces the difficulties resulting from the inability to observe potentially important ecological interactions. We first provide an overview of our approach to the analysis of multivariate time series of CPUE data, which are potentially non-stationary. We then describe a quantitative framework for a linear multi-species community model. Then, we demonstrate an application of our approach by analyzing CPUE time series data from the shrimp/ground fish fishery in the Gulf of Mexico. Finally, we discuss some implications of our results.

Steps in analyzing multivariate time series data. a After plotting each individual time series, we first check visually for non-stationary behavior. Then, various stationarity and unit-root tests, e.g., KPSS test and Dickey–Fuller test, can be conducted to confirm the stationarity or the existence of a unit-root in the time series. A time series having a unit-root in its characteristic equation is not stationary. There are other types of non-stationarity as mentioned in the introduction, but we do not discuss them here. b Next, linear models are built. When some (\({\ge }2\)) of the time series are integrated, we use multivariate unit-root tests to determine the long-run relationship among time series. c Given the long-run relationship, ecological hypotheses can be tested. If test results indicated that only one time series \(\{x_t\}\) is non-stationary, other time series should be linearly independent of \(\{x_t\}\) in the long term relation because a non-trivial linear combination of a non-stationary time series and stationary time series cannot be stationary. When all the individual time series are stationary, vector autoregressive models can be used, and all the hypothesis tests outlined above can be conducted in a similar fashion
2 Materials and methods
2.1 Overview of the proposed method
An overview of the steps involved in our approach to identifying bottom-up and top-down control by analyzing multivariate time series data is presented in Fig. 2. First, non-stationarity in the time series is checked visually based on time series plots. Then, to confirm the observation, univariate unit-root tests, e.g., the KPSS test (Kwiatkowski et al. 1992) and the Dickey–Fuller tests (Dickey and Fuller 1979; Said and Dickey 1984), are applied. Unit-root tests indicate whether the time series is stationary or a unit-root exists. We note that there are other processes generating non-stationarity in the data (Stenseth et al. 2004; Engle 1982), but they are beyond the scope of this paper. If the time series is produced by a unit-root process, it is not stationary, but its first difference is stationary. For this reason, a unit-root process is also considered integrated of order one, denoted as I(1); the first difference of a unit-root process is considered integrated of order zero, denoted by I(0), because the difference is stationary without further differencing.
Next, linear models are built. If every time series is stationary, vector autoregressive (VAR) or multivariate autoregressive (MAR) models (Ives et al. 2003; Hampton et al. 2013) can be applied directly. If some or all of the time series are integrated of order one, multivariate unit-root tests (Johansen 1991) are used to test if a non-trivial linear combination of I(1) processes is integrated of order zero. If such a linear relationship exists, the linear combination is considered to be the co-integration relation. Because non-stationarity is common among population time series, our approach will expand the applicability of the analysis by incorporating non-stationarity into a VAR or MAR model. Given the presence or the lack of co-integration relation(s) among non-stationary time series, VAR models that incorporate various ecological hypotheses related to community structures are built. This is described in the next section.
2.2 A multi-species linear population model
Vector autoregressive (VAR) models are routinely used to model population time series data (Hampton et al. 2013). Due to the presence of non-stationary time series, here, the VAR model is written in a vector error correction model (VECM) form (Engle and Granger 1987). A pth order VAR model for s populations is
where \({\varvec{N}}(t)\) is an \(s\times 1\) vector of log-transformed population abundances at time t, \({\varvec{\varPhi }}_i\) (\(i=1,2,\dots ,p\)) are \(s\times s\) coefficient matrices, vector \(\varvec{C}\) is an intercept term, and vector \({\varvec{W}}(t)\) is a stochastic term. It has a VECM representation
where
where \(j=1,2,\dots ,p-1\), \(\varDelta {\varvec{N}}(t)={\varvec{N}}(t)-{\varvec{N}}(t-1)\), \({\varvec{B}}\) and \(\varTheta _i\) (\(i=1,2,\dots ,p-1\)) are \(s\times s\) coefficient matrices. Matrix \({\varvec{B}}\) (\(s\times s\) with rank r) can be written as a matrix product \(\alpha \beta ^\mathrm{T}\) with \(\alpha \) and \(\beta \) each with dimension \(s\times r\), and T denotes the transpose of a vector. Each column of \(\beta \) contains coefficients for the co-integration relation, and each column of \(\alpha \) contains what are called adjustment coefficients, and it determines how much each population is responding to the co-integration relationship. \(\beta {\varvec{N}}\) is called disequilibrium error and it plays an important role in determining the long term community dynamics as described later in this section. On the left hand side of Eq. 1 is the change of the s-dimensional state vector at time t. This change is decomposed into four components on the right hand side of the equation. From left to right, we interprete these terms as the long-run relationship, short-run relationship, intercept term and stochastic term, respectively. Each individual time series in vector \({\varvec{N}}(t)\) can be either integrated of order one or zero.
In the main text, we focus on inferences on the long-run component of the model, and defer the results on the short-run component to the “Appendix”. Inferences on the short-run component of the model are well known and covered elsewhere (Lütkepohl 2007; Hampton et al. 2013). We expect that when regulation is not strong at the individual population level, i.e., the non-stationarity of some univariate population time series cannot be rejected, the long-run component of the model plays the major role in community dynamics.
The number of linear equilibrium relationships among potentially non-stationary time series, i.e., the rank of matrix \(\varvec{B}\), can be estimated by Johansen’s test of co-integration, which has been verified with simulated data sets and extensively used in econometrics (Johansen and Juselius 1990; Johansen 1991, 1995). First, VAR models were fitted to the data, and order p was chosen based on BIC (Tsay 1984). Then, likelihood ratio tests were used to determine the rank of matrix \(\varvec{B}\). The test statistic (trace statistics) was calculated successively to determine the rank of matrix \(\varvec{B}\), starting from the null hypothesis of no equilibrium relationship (\(r=0\)) against at least one equilibrium relationship (\(r\ge 1\)) and adding the number of equilibrium relationships at each step. With the rank of matrix \(\varvec{B}\) set to r, different hypotheses based on \(\alpha \) and \(\beta \) were formed and tested using likelihood ratio tests (Johansen 1995).
The contribution of the long-run component of the model to community dynamics is determined by the rank of \(\varvec{B}\). The equilibrium states are in the null space of matrix \(\varvec{B}\), which is the set of solutions to \({\varvec{B}}x=0\), and their dimension depends on the number of I(1) time series and the linear dependency of the time series. We consider the following three cases (1) when all the time series in \({\varvec{N}}\) are stationary, (2) when some of the time series are I(1) and subsets of them form co-integration relationships, (3) when all the time series are I(1) and they do not co-integrate. When matrix \(\varvec{B}\) is of full rank (i.e., \(r=s\)), the equilibrium state is a point in the s-dimensional space. When this equilibrium point is stable, it attracts community trajectories in the long run. On the other hand, when some of the components of vector \({\varvec{N}}\) are not stationary, matrix \(\varvec{B}\) is of reduced rank, and the long-run component plays a major role in community dynamics. When some of these time series co-integrate (Engle and Granger 1987), i.e., there is a non-trivial linear combination of I(1) time series that produces a stationary time series, the community dynamics are regulated. When all the time series are integrated of order one and do not co-integrate, the rank is zero (Johansen 1995) and the community dynamics are not regulated. In addition, we consider an equilibrium relationship exists among all the species considered if the disequilibrium errors, i.e., each component of \({\beta } {\varvec{N}}\), follow a stationary process (Banerjee et al. 1993). The disequilibrium errors are calculated as \(\hat{\beta }\mathrm{T}{\varvec{N}}\), where \(\hat{\beta }\) is estimated through Johansen’s procedure. The equilibrium states of the system defined by Eq. 1 can be found by setting stochastic terms to zero, substituting \({\varvec{N}}(t)\) and \({\varvec{N}}(t-1)\) by \({\varvec{N}}^*\), and solving for \({\varvec{N}}^*\).
When every component of matrix \(\varvec{N}\) is stationary, a VAR model can be applied directly to the population data. The test of bottom-up forcing becomes a test of the significance of the coefficients of the resource population terms in the consumer equations, and the test of top-down forcing becomes a test of the significance of the coefficients of the consumer population terms in the resource equations. Likelihood ratio tests can then be constructed to test the significance of each hypothesis (Lütkepohl 2007).
When not all the components of vector \(\varvec{N}\) are stationary, and some of those non-stationary components co-integrate, matrix \({\varvec{B}}\) becomes singular. The coefficients that make the linear combinations of components of \(\varvec{N}\) stationary are in the rows of \(\beta \). These linear combinations become factors, into which the equilibrium relationship for each component population is partitioned. The factor scores are found in the columns of \(\alpha \). Matrix \(\varvec{B}\) is factored into \(\alpha \beta \mathrm{T}\), \(\alpha \) is s-by-r, and \(\beta \) is s-by-r. Here, s is the number of time series, and r is the rank of matrix \(\varvec{B}\). Then the term \(\varvec{B}N\) can be written as \(\alpha \beta \mathrm{T} {\varvec{N}}\). Vector \(\varvec{N}\) is the vector of original time series. The coefficients of each column of \(\beta \) are the coefficients that make linear combinations of the time series \(\varvec{N}\) stationary. There would be r such linear combinations. These r linear combinations (i.e., \(\beta \mathrm{T} {\varvec{N}}\)) are similar to factors, because they are unobserved and the number of them is less than the number of original time series. Thus, \(\beta \) is similar to factor score coefficients, and \(\alpha \) is similar to factor loadings. By testing constraints (restrictions) on \(\beta \), we can determine which species have an equilibrium relationship. Similarly, by testing restrictions on \(\alpha \), we can determine the direction of species interactions.
Finally, when all the time series are non-stationary and linearly independent, the rank of matrix \(\varvec{B}\) is zero. In this case, there is no simple equilibrium relationship among these time series, and bottom-up and top-down hypotheses cannot be tested.
\({\varvec{N}}\) may also have a drifting trend. This trend is incorporated into \(\varvec{C}\), and its significance can then be tested (Johansen 1991). When the population dynamics do not have a drift term, the intercept term (\(\varvec{C}\)) in Eq. 1 can be moved inside the matrix product \(\varvec{B N}\), and it will be stacked at the first row of \(\beta \) with \(\varvec{N}\) augmented by a constant. Such a model is called a restricted intercept model.
2.3 Significance of a focal population in the long-run component of the assemblage dynamics
Sometimes it is necessary to test the significance of a focal population in the equilibrium relationship(s). Suppose we have time series data of one resource population and multiple consumer populations. When an equilibrium (co-integration) relation is identified in the data set, either of the following scenarios is possible: (1) the equilibrium relation is among those consumer populations; (2) the equilibrium relation is between the resource and consumer populations. Testing the significance of the resource population in the equilibrium relation rules out the first scenario where the interaction is competitive.
When the community assemblage has one or more equilibrium relationships identified through testing the rank of \(\varvec{B}\), the significance of a focal population in the equilibrium relationship(s) can be tested. The testing procedure is as follows. The null hypothesis assumes that the focal population does not have any equilibrium relationship with the rest. This hypothesis can be constructed by restricting the coefficient(s) corresponding to focal population(s) in each equilibrium relationship to zero (coefficients in the columns of \(\beta \) for the co-integration relation). The likelihood ratio test is used to test the significance of the focal population in the equilibrium relationship.
2.4 Significance of bottom-up forcing and top-down forcing in the long-run component
If the resource population is found to contribute significantly to the dynamics, we then test the significance of bottom-up forcing and top-down forcing. These hypotheses are formed by restricting elements of \(\alpha \).
Before testing the restrictions on \(\alpha \), we already tested the significance of the cointegration relation and the significance of the focal population in that relation. Non-zero entries of \(\alpha \) thus indicate the corresponding variable is responding to changes in the long term cointegration relation (or the dis-equilibrium errors), which is a linear combination of both resource and consumer variables. A row of zeros indicates the corresponding variable is not responding to the changes in the long term relation. Therefore, finding non-zero entries in \(\alpha \) determines which population is responding to the changes in the long term relation. When we find non-zero entries in the row of \(\alpha \) for the resource equation, we say there is top-down effect in the long term dynamics; similarly, when we find non-zero entries in the row of \(\alpha \) for the predator equation, we say there is bottom-up effect in the long term dynamics.
Top-down hypothesis assumes that only the resource population is responding to deviations from the equilibrium relationship(s), and other populations are not. This hypothesis can be constructed by restricting the adjustment coefficients for the consumer populations to zero, while allowing the coefficient for the resource population to vary freely. When we have only one resource population, the restriction on \(\alpha \) forces \(r\le 1\). When there is more than one equilibrium relationship, this identified equilibrium relationship is a linear combination of all the equilibrium relationships. The likelihood ratio test can be constructed, and the test statistic has an asymptotic \(\chi ^2\) distribution. Deviations from the null hypothesis indicates bottom-up forcing.
Meanwhile, bottom-up hypothesis assumes that only the consumer group was responding to deviations from the equilibrium relationship(s). Similar to the top-down hypothesis, in the null hypothesis the adjustment coefficients for the resource group are set to zero, and those of the consumer populations are allowed to vary freely. Deviations from the null hypothesis indicates top-down forcing.
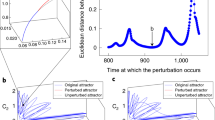
For the density dependence in the short-term component of the model, see the “Appendix”. In addition, it is also possible for a community to have both significant bottom-up forcing and top-down forcing. For such a community, the dynamics are interactive: both the resource and the consumer populations are affecting the dynamics of each other. Moreover, in the “Appendix”, a nonlinear predator-prey model was used to explore small sample properties of the co-integration method and bottom-up and top-down tests, and these tests showed reasonable performance even with short time series.
2.5 Data
The analysis testing ecological hypotheses is illustrated using survey data collected for fisheries management. The data were collected by the United States National Marine Fisheries Service (NMFS) Southeast Area Monitoring and Assessment Program (SEAMAP; Stuntz et al. 1985). Our analysis used the semi-annual shrimp/ground fish surveys conducted from 1986 to 2011 in the northern Gulf of Mexico between Mobile Bay, Alabama and Brownsville, Texas. Each year, approximately 300–400 bottom trawl samples were collected. Although the SEAMAP shrimp/ground fish program started in 1982, the data from 1982 to 1985 were omitted from the analysis due to inconsistent coverage and changes in sampling methods. Surveys were conducted once during the summer (May–July) and once during the fall (October–November). The northern part of the Gulf of Mexico is divided into 21 statistical zones for fisheries surveys. Our analysis used data from 10 statistical zones in the west, zones 11 through 21, excluding zone 12. The location of bottom trawl stations was randomly selected at each sampling occasion within each zone. At each sampling station, time and environment variables, e.g., water temperature, salinity and depth, were recorded at the time of sampling.

Standardized CPUE time series of brown shrimp (a), Atlantic croaker (b), silver seatrout (c) and sand seatrout (d) from statistical zone 15 in the Gulf of Mexico from 1986 to 2011
Penaeid shrimps found in the northern Gulf of Mexico include brown shrimp, Farfantepenaeus Aztecs, white shrimp, Litopenaeus setiferus, and pink shrimp, Farfantepenaeus duorarum (Perez-Farfante and Kensley 1997). The commercial shrimp fishery targeted all of these species. In 2009, landings were estimated at 118 million kg and valued at 340 million US dollars (National Marine Fisheries Service 2010). Brown shrimp was the most abundant among the three species.
Three finfish species, Atlantic croaker, Micropogonias undulatus, silver seatrout, Cynoscion nothus and sand seatrout, Cynoscion arenarius were included in the analysis. Their distribution patterns, ecological roles, and status in bottom fisheries, with an emphasis on their relation with penaeid shrimps, are outlined in the “Appendix”. These fish species were chosen because they ranked high in catches in the surveys as well as bycatch in the shrimp fishery (Diamond 2004). Both the junevile and adult individuals are well represented in the data (Monk et al. 2015). The fact that these fish species coexisted in large numbers with brown shrimp suggests the potential for ecological interactions between each of these fish species and brown shrimp.
2.6 CPUE standardization of shrimp and fish populations in the Gulf of Mexico from SEAMAP shrimp/ground fish program
Data were standardized using a delta generalized linear model (Fletcher et al. 2005) to each species in each statistical zone to extract annual abundance indices. This method is commonly used in this region (see the “Appendix” for details). We modelled season as a categorical variable (summer is modelled as no effect), and removed the effect of fall sampling from the data. All the following analyses were conducted on the natural logarithms of the standardized CPUE time series.
The existence of a unit root was tested using the augmented Dickey–Fuller (ADF) test (Said and Dickey 1984). The null hypothesis was that the tested time series was a unit root process. We used Bayesian Information Criterion (BIC) for model selection from a set of models (Schwert 2002), which had different time lags. All the statistical analyses were performed using R statistical software (R Core Team 2014), and the scripts used in this paper can be found in the supplementary material.
3 Results
The CPUE time series of brown shrimp and three fish species in zone 15 from 1986 to 2011 are shown in Fig. 3. Time series of other zones can be found in the supplementary material. The zone-specific results that follow are for zone 15 unless specifically noted otherwise. Brown shrimp showed an intermediate level of fluctuations among all the species considered over the 26-year period, with CPUE peaking in 1993 and 2010. Atlantic croaker was the most abundant among all the species, and its CPUE abruptly increased from 2006 to 2007. Silver seatrout and sand seatrout showed patterns similar to brown shrimp, with peaks around 1995 and 2009, but their time series appeared to exhibit a higher frequency of fluctuations.
ADF tests showed that the existence of a unit-root could not be rejected, and the tests on first differenced data all rejected the existence of a unit-root at the 1 % level (Table 1). This suggested that the original log-transformed time series were non-stationary, and were integrated of order one. Unit-root tests on the data from other zones also showed the prevalence of unit-root non-stationarity in the CPUE time series (see supplementary material).
The likelihood ratio test statistic of a restricted intercept model against the unrestricted model was 0.68 (\(p=0.88\)). This test supports the assumption that there is no drift term, \({\varvec{C}}=0\). The tests from other zones all supported the model with no drift term. The Johansen rank test showed that, under the restricted model, the null hypothesis of no equilibrium relationships was rejected at the 5 % level, and the null of less than or equal to one equilibrium relationship could not be rejected (Table 2). For this case, we accept that there was one equilibrium relationship in the community assemblage dynamics. Estimates of \(\alpha \) and \(\beta \) from the intercept-restricted model with \(r=1\) were then obtained (Table 3). The co-integration relation, or dis-equilibrium errors, was plotted in Fig. 4. The disequilibrium errors appear stationary and it suggests community density dependence while single populations lacked density dependence.
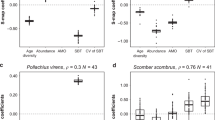
The hypotheses testing showed that the species interaction pattern was location-dependent in the Gulf of Mexico. Community assemblages in zones 14 and 19 did not show any equilibrium relationship, those in zones 16 and 17 showed two equilibrium relationships, and the rest of the locations showed one significant relationship (Table 4). The test of significance of the brown shrimp population in the equilibrium relationship(s) showed positive results in zones 16, 17 and 18 (Table 4), indicating a significant contribution of brown shrimp. The tests of bottom-up and top-down forcing then were conducted on these three zones. The contribution of the brown shrimp population to the equilibrium relationship was not significant in zones 11, 13, 15, 20 and 21, where the recognized equilibrium relationship was among the fish species.

Cointegration relation from statistical zone 15 between 1986 and 2011 in the Gulf of Mexico. Stationary fluctuation suggests community density dependence among populations
Significant bottom-up forcing was identified in two out of those three assemblages, where the brown shrimp population had significant contributions to the long-run component in the community dynamics (Table 5). Top-down forcing was not significant in those three assemblages. In zone 17, neither the bottom-up forcing nor the top-down forcing was identified.
4 Discussion
In this paper, we demonstrated a new practical approach to testing bottom-up and top-down processes in a multi-species community with short time series that appear to be unregulated. This approach explicitly tests for and incorporates non-stationary dynamics in multivariate time series, which are common in ecological and fisheries data. Compared with the traditional correlation approach, results of this method are robust against complex and/or partially observable community structure. The method demonstrated here is a type of restricted VAR model, and this restriction allow explicit incorporation of non-stationary dynamics into the model formulation and estimation. For systems exhibiting high-frequency fluctuation due to strong nonlinearity, e.g., chaotic dynamics, a method based on nonlinear state space reconstruction can be used (Takens 1981; Sugihara et al. 2012).
The method presented in this paper is related to the MAR models in fisheries (Hampton et al. 2013). Our method here adds to the traditional MAR modeling by utilizing the non-stationarity feature of the data to highlight long term relationships within the community. It is a data-orientated modeling approach. The utility of the method presented in this paper is not only the addition of non-stationarity into the statistical model, but also the ecological questions we can ask based on this modeling framework. Our approach could be applied to a large number of existing data sets to test hypotheses of species interaction patterns in community dynamics. In addition, as a type of vector autoregressive model, the model presented in this paper also have the advantage of being able to model age/stage structured populations dynamics via delay-embedding (Nisbet and Gurney 1982).
The analysis of reduced rank VECM as presented in this paper is also closely related to dynamic factor analysis (DFA; Zuur et al. 2003) in the fisheries literature. The motivations for both methods are similar in analyzing non-stationary dynamics in time series, but the difference lies in their representations of the process. DFA characterizes time series in terms of a linear combination of unobserved random walks or common trends, and the co-integration method constructs time series using the disequilibrium error from equilibrium relationships. It is well known in econometrics that these two approaches are equivalent (Johansen 1995; Engle and Granger 1987; Stock and Watson 1988; Escribano and Peña 1994). The dynamic factor analysis focuses on the extraction of common trends, which do not attach any immediate ecological meaning other than the fact that these common trends are shared across multiple time series. The method presented here finds linear combinations of the original time series that cancel out the shared common trends in order to extract a more stable time series. Finally, our method is built upon a multi-species model and various ecological hypotheses can be readily constructed, e.g., top-down and bottom-up controls.
Can unit-root processes represent the non-stationary dynamics exhibited by natural populations? For example, a random walk model (Lewontin and Cohen 1969) has been used to model a population under a stochastic environment (Niwa 2007; Cohen 2013). As in the random walk model, unit-root processes are statistical approximations to the dynamics; therefore, they should not be taken as representing the true underlying mechanism. For example, according to this model, individual population abundances can grow arbitrarily large given enough time, but for natural populations, there is always some upper bound imposed on population growth, e.g., by food shortage or lack of suitable habitat. On a longer time scale, this behavior of natural populations contradicts the model. However, when the observation period is relatively short for ecological studies, e.g., 26 years in this study and 31–60 years in Niwa (2007), unit-root models can provide reasonable approximations to the underlying processes and can be used to gain insights into the population and community dynamics.
When top-down processes exist, they are often referred to as trophic cascades, which implies that top-down forces mainly occur in communities with chain-like trophic structures, or trophic ladders (Strong 1992). However, we suggest that trophic ladders are rather a special case of top-down processes in communities with simple structures. The simplistic view of top-down process was the assumption behind the correlation analysis. Top-down processes, as defined in the introduction of this paper, on the other hand, can incorporate species interactions more generally.
In marine ecosystems, bottom-up processes are considered more prevalent (Cushing 1975; Aebischer et al. 1990; Verity and Smetacek 1996; Chavez et al. 2003) and sometimes are treated as the “normal state” (Strong 1992; Frank et al. 2006), whereas top-down processes are considered to be limited to near-shore and inter-tidal communities with simple trophic structures (Chapin et al. 1997; Pinnegar et al. 2000). In the Gulf of Mexico marine communities, our results showed a diversity of species interaction patterns in the community dynamics. Brown shrimp did not have an equilibrium relationship with the three fish species investigated in either the west or north sides of the study area. In the central zones of the study area, brown shrimp contributed significantly to the community assemblage dynamics. Significant bottom-up forcing was identified in two of those three central zones. In this study, fish species were selected based on their high population density, and this might have caused the inability to detect top-down forcing. Additionally, spatial heterogeneity of the ecological process may also have affected the detection of species interactions in the example as pointed out by one of the reviewers. It would be very interesting to further explore the effect of spatial autocorrelation on the detection of species interactions. Further research should also look at how environmental covariates, including anthropological factors, would impact observed community dynamics.
References
Aebischer N, Coulson J, Colebrookl J (1990) Parallel long-term trends across four marine trophic levels and weather. Nature 347:753–755
Banerjee A, Dolado J, Galbraith J, Hendry D (1993) Co-integration, error correction, and the econometric analysis of non-stationary data. Oxford University Press, New York
Bryan C, Cody T, Matlock G (1982) Organisms captured by the commercial shrimp fleet on the Texas brown shrimp (Penaeus aztecus) grounds. Technical Series Number 31
Chapin F III, Walker B, Hobbs R, Hooper D, Lawton J, Sala O, Tilman D (1997) Biotic control over the functioning of ecosystems. Science 277(5325):500–504
Chavez F, Ryan J, Lluch-Cota S, Ñiquen M (2003) From anchovies to sardines and back: multidecadal change in the Pacific Ocean. Science 299(5604):217–221
Christmas J, Waller R (1973) Estuarine vertebvrates, Mississippi. In: Cooperative Gulf of Mexico estuarine inventory and study, Mississippi. Gulf Coast Reserach Laboratory, Ocean Springs, MS
Cloern J, Jassby A, Carstensen J, Bennett W, Kimmerer W, Mac Nally R, Schoellhamer D, Winder M (2012) Perils of correlating CUSUM-transformed variables to infer ecological relationships (Breton et al. 2006; Glibert 2010). Limnol Oceanogr 57(2):665–668
Cohen J (2013) Taylor’s power law of fluctuation scaling and the growth-rate theorem. Theor Popul Biol 88:94–100
Cushing D (1975) Marine ecology and fisheries. Cambridge University Press, Cambridge
Darnell R (1961) Trophic spectrum of an estuarine community, based on studies of Lake Pontchartrain, Louisiana. Ecology 42:553–568
Detto M, Molini A, Katul G, Stoy P, Palmroth S, Baldocchi D (2012) Causality and persistence in ecological systems: a nonparametric spectral granger causality approach. Am Nat 179(4):524–535
DeVries D, Chittenden ME Jr (1982) Spawning, age determination, longevity, and mortality of the silver seatrout, cynoscion nothus, in the Gulf of Mexico. Fish Bull 80:487–500
Diamond S (2004) Bycatch quotas in the gulf of mexico shrimp trawl fishery: can they work? Rev Fish Biol Fish 14(2):207–237
Dickey D, Fuller W (1979) Distribution of the estimators for autoregressive time series with a unit root. J Am Stat Assoc 74(366a):427–431
Enders W (2008) Applied econometric time series. Wiley, New York
Engle R (1982) Autoregressive conditional heteroscedasticity with estimates of the variance of United Kingdom inflation. Econometrica 50(4):987–1007
Engle R, Granger C (1987) Co-integration and error correction: representation, estimation, and testing. Econometrica 55(2):251–276
Escribano A, Peña D (1994) Cointegration and common factors. J Time Ser Anal 15:577–586
Fletcher D, MacKenzie D, Villouta E (2005) Modelling skewed data with many zeros: a simple approach combining ordinary and logistic regression. Environ Ecol Stat 12(1):45–54
Frank K, Petrie B, Choi J, Leggett W (2005) Trophic cascades in a formerly cod-dominated ecosystem. Science 308(5728):1621–1623
Frank K, Petrie B, Shackell N, Choi J (2006) Reconciling differences in trophic control in mid-latitude marine ecosystems. Ecol Lett 9(10):1096–1105
Ginsburg I (1931) On the difference in the habitat and the size of Cynoscion arenarius and C. nothus. Copeia 1931:144
Granger C (1969) Investigating causal relations by econometric models and cross-spectral methods. Econometrica 37(3):424–438
Gunter G (1938) Seasonal variations in abundance of certain estuarine and marine fishes in Louisiana, with particular reference to life histories. Ecol Monogr 8:313–366
Gunter G (1945) Studies on marine fishes of Texas. Publ Inst Mar Sci Univ Tex 3:1–190
Hairston N, Smith F, Slobodkin L (1960) Community structure, population control, and competition. Am Nat 94(879):421–425
Halley J, Stergiou K (2005) The implications of increasing variability of fish landings. Fish Fish 6(3):266–276
Hampton S, Holmes E, Scheef L, Scheuerell M, Katz S, Pendleton D, Ward E (2013) Quantifying effects of abiotic and biotic drivers on community dynamics with multivariate autoregressive (mar) models. Ecology 94(12):2663–2669
Hildebrand S, Schroeder W (1928) Fishes of Chesapeake Bay. US Bur Fish 43:1–366
Holomuzki J, Feminella J, Power M (2010) Biotic interactions in freshwater benthic habitats. J N Am Benthol Soc 29(1):220–244
Hunter M, Price P (1992) Playing chutes and ladders: heterogeneity and the relative roles of bottom-up and top-down forces in natural communities. Ecology 73(3):723–732
Inchausti P, Halley J (2001) Investigating long-term ecological variability using the global population dynamics database. Science 293(5530):655–657
Ives A, Dennis B, Cottingham K, Carpenter S (2003) Estimating community stability and ecological interactions from time-series data. Ecol Monogr 73(2):301–330
Johansen S (1991) Estimation and hypothesis testing of cointegration vectors in gaussian vector autoregressive models. Econometrica 59(6):1551–1580
Johansen S (1995) Likelihood-based inference in cointegrated vector autoregressive models. Oxford University Press, New York
Johansen S, Juselius K (1990) Maximum likelihood estimation and inference on cointegration with applications to the demand for money. Oxf Bull Econ Stat 52(2):169–210
Knape J, De Valpine P (2012) Fitting complex population models by combining particle filters with Markov chain Monte Carlo. Ecology 93(2):256–263
Knape J, de Valpine P (2012) Are patterns of density dependence in the global population dynamics database driven by uncertainty about population abundance? Ecol Lett 15(1):17–23
Krebs C, Hickman G, Hickman S (1994) Ecology: the experimental analysis of distribution and abundance, vol 4. Harper Collins College Publishers, New York
Kwiatkowski D, Phillips P, Schmidt P, Shin Y (1992) Testing the null hypothesis of stationarity against the alternative of a unit root: How sure are we that economic time series have a unit root? J Econom 54(1):159–178
Lande R, Engen S, Saether B (2003) Stochastic population dynamics in ecology and conservation. Oxford University Press, Oxford
Laundré J, Hernández L, López Medina P, Campanella A, López-Portillo J, González-Romero A, Grajales-Tam K, Burke A, Gronemeyer P, Browing D (2014) The landscape of fear: the missing link to understand top-down and bottom-up controls of prey abundance? Ecology 95(5):1141–1152
Lewontin R, Cohen D (1969) On population growth in a randomly varying environment. Proc Natl Acad Sci 62(4):1056–1060
Lütkepohl H (2007) New introduction to multiple time series analysis. Springer, New York
Miller J (1965) A trawl survey of the shallow gulf fishes near Port Arsnsas, Texas. Publ Inst Mar Sci Univ Tex 10:80–107
Moffett A, McEachron L, Key J (1979) Observations on the biology of sand seatrout (Cynoscion arenarius) in Galveston and Trinity Bays, Texas. Contrib Mar Sci Univ Tex 15:45–70
Monk M, Powers J, Brooks E (2015) Spatial patterns in species assemblages associated with the northwestern Gulf of Mexico shrimp trawl fishery. Mar Ecol Prog Ser 519:1–12
Moore D, Brusher H, Trent L (1970) Relative abundance, seasonal distribution, and species composition of demersal fishes off Louisiana and Texas, 1962–1964. Contrib Mar Sci Univ Tex 15:45–70
Murdoch W (1994) Population regulation in theory and practice. Ecology 75(2):271–287
Mutshinda C, O’Hara R, Woiwod I (2009) What drives community dynamics? Proc R Soc B Biol Sci 276(1669):2923–2929
National Marine Fisheries Service (2010) Essential Fish Habitat: a marine fish habitat conservation mandate for federal agencies, Gulf of Mexico region, St. Petersburg, FL
Nisbet R, Gurney W (1982) Modelling fluctuating populations. Wiley, New York
Niwa H (2007) Random-walk dynamics of exploited fish populations. ICES J Mar Sci J du Conseil 64(3):496–502
Nye J (2008) Bioenergetic and ecological cosnsequences of diet variability in Atlantic croaker, Micropogonias undulatus. Ph.D. dissertation, University of Maryland
Oksanen L, Fretwell S, Arruda J, Niemela P (1981) Exploitation ecosystems in gradients of primary productivity. Am Nat 118(2):240–261
Overstreet R, Heard R (1982) Food contents of six commercial fish from Mississippi Sound. Gulf Res Rep 7:137–149
Paine R (1980) Food webs: linkage, interaction strength and community infrastructure. J Anim Ecol 49(3):667–685
Perez-Farfante I, Kensley B (1997) Penaeoid and sergestoid shrimps and prawns of the world. Keys and diagnoses for the families and genera, volume 175. Editions du Museum national d’Histoire naturelle
Pimm S, Redfearn A (1988) The variability of population densities. Nature 334:613–614
Pinnegar J, Polunin N, Francour P, Badalamenti F, Chemello R, Harmelin-Vivien M, Hereu B, Milazzo M, Zabala M, d’Anna G (2000) Trophic cascades in benthic marine ecosystems: lessons for fisheries and protected-area management. Environ Conserv 27(2):179–200
R Core Team (2014) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna
Rabalais N, Turner R, Wiseman WJJ (2002) Gulf of Mexico hypoxia, aka “the dead zone”. Annu Rev Ecol Syst 33(1):235–263
Ray C, Hastings A (1996) Density dependence: are we searching at the wrong spatial scale? J Anim Ecol 65:556–566
Reid GK Jr (1954) An ecological study of the Gulf of Mexico fishes, in the vicinity of Cedar Key, Florida. Bull Mar Sci Gulf Caribb 4:1–94
Reid GK Jr (1955) A summer study of the biology and ecology of East Bay, Texas. Part 2: the fish fauna of East Bay, the gulf beach, and summary. Tex J Sci 7:430–453
Reid G, Inglis A, Hoese H (1956) Summer foods of some fish species in East Bay, Texas. Southwest Nat 1:100–104
Rogers RM Jr (1977) Trophic interrelationships of selected fishes on the continental shelf of the northern Gulf of Mexico. Ph.D. Dissertation. Texas A&M University, College Station, p 229
Roithmayr C (1965) Industrial bottomfish fishery of the northern Gulf of Mexico, 1959–63. Special scientific report. Fisheries (U.S. Fish and Wildlife Service) 548:23
Rouyer T, Fromentin J, Stenseth N, Cazelles B (2008) Analysing multiple time series and extending significance testing in wavelet analysis. Mar Ecol Prog Ser 359:11–23
Said S, Dickey D (1984) Testing for unit roots in autoregressive-moving average models of unknown order. Biometrika 71(3):599–607
Schwert G (2002) Tests for unit roots: a Monte Carlo investigation. J Bus Econ Stat 20(1):5–17
Sheridan P (1979) Trophic resource utilization by three species of sciaenid fishes in a northwest Florida estuary. Northeast Gulf Sci 3:1–15
Sheridan P, Trimm D, Baker B (1984) Reproduction and food habits of seven species of Northern Gulf of Mexico fishes. Mar Sci 270:175–204
Sheridan P, Livingston R (1979) Cyclic trophic relationships of fishes in an unpolluted, river-dominated estuary in north Florida. In: Livingston, R (ed) Ecological processes in coastal and marine systems. Plenum Press, New York
Shiomoto A, Tadokoro K, Nagasawa K, Ishida Y (1997) Trophic relations in the subarctic North Pacific ecosystem: possible feeding effect from pink salmon. Mar Ecol Prog Ser 150(1):75–85
Smith J, Hunter C, Smith C (2010) The effects of top-down versus bottom-up control on benthic coral reef community structure. Oecologia 163(2):497–507
Springer V, Woodburn K (1960) An ecological study of the fishes of the Tampa Bay Area. Fla Board Conserv Mar Lab Prof Pap Ser 1:1–104
Steele J (1985) A comparison of terrestrial and marine ecological systems. Nature 313(6001):355–358
Stenseth N, Falck W, Bjørnstad O, Krebs C (1997) Population regulation in snowshoe hare and canadian lynx: asymmetric food web configurations between hare and lynx. Proc Natl Acad Sci 94(10):5147–5152
Stenseth N, Chan K, Tavecchia G, Coulson T, Mysterud A, Clutton-Brock T, Grenfell B (2004) Modelling non-additive and nonlinear signals from climatic noise in ecological time series: Soay sheep as an example. Proc R Soc Lond Ser B Biol Sci 271(1552):1985–1993
Stergiou K (2002) Overfishing, tropicalization of fish stocks, uncertainty and ecosystem management: resharpening Ockham’s razor. Fish Res 55(1–3):1–9
Stock J, Watson M (1988) Testing for common trends. J Am Stat Assoc 83(404):1097–1107
Strong D (1986) Density-vague population change. Trends Ecol Evol 1(2):39–42
Strong D (1992) Are trophic cascades all wet? Differentiation and donor-control in speciose ecosystems. Ecology 73(3):747–754
Stuntz W, Bryan C, Savastano K, Waller R, Thompson P (1985) SEAMAP environmental and biological atlas of the Gulf of Mexico, 1982. Gulf States Fishery Commission Report
Sugihara G, May R, Ye H, Hsieh C, Deyle E, Fogarty M, Munch S (2012) Detecting causality in complex ecosystems. Science 338(6106):496–500
Takens F (1981) Detecting strange attractors in turbulence. In: Rand D, Young LS (eds) Dynamical systems and turbulence, Warwick 1980. Lecture notes in mathematics, vol 898, Springer, Berlin, pp 366–381. doi:10.1007/BFb0091924
Tsay R (1984) Order selection in nonstationary autoregressive models. Ann Stat 12(4):1425–1433
Verity P, Smetacek V (1996) Organism life cycles, predation, and the structure of marine pelagic ecosystems. Mar Ecol Prog Ser 130(1):277–293
Warren J (1981) Population analyses of the juvenile groundfish on the traditional shrimping grounds in Mississippi Sound before and after the opening of the shrimp season. M.S. Thesis, University of Southern Mississippi, Hattiesburg, p 93
Wilberg M, Bence J (2006) Performance of time-varying catchability estimators in statistical catch-at-age analysis. Can J Fish Aquat Sci 63(10):2275–2285
Wilson W, Lundberg P (2006) Non-neutral community dynamics: empirical predictions for ecosystem function and diversity from linearized consumer–resource interactions. Oikos 114(1):71–83
Wootton J (1994) The nature and consequences of indirect effects in ecological communities. Annu Rev Ecol Syst 25(1):443–466
Worm B, Myers R (2003) Meta-analysis of cod-shrimp interactions reveals top-down control in oceanic food webs. Ecology 84(1):162–173
Zhou C, Fujiwara M, Grant W (2013) Dynamics of a predator–prey interaction with seasonal reproduction and continuous predation. Ecol Model 268:25–36
Zuur A, Tuck I, Bailey N (2003) Dynamic factor analysis to estimate common trends in fisheries time series. Can J Fish Aquat Sci 60(5):542–552
Acknowledgments
We thank Jeff K. Rester for providing access to the Southeast Area Monitoring and Assessment Program (SEAMAP) trawl database. We thank two anonymous reviewers, whose comments substantialy improved the quality of this manuscript. We also thank the editor for coordinating the whole publication process. This publication is supported in part by an Institutional Grant (NA14OAR4170102) to the Texas Sea Grant College Program from the National Sea Grant Office, National Oceanic and Atmospheric Administration, U.S. Department of Commerce. In addition, C.Z. was supported by a Tom Slick graduate research fellowship. All views, opinions, findings, conclusions, and recommendations expressed in this paper are those of the author(s) and do not necessarily reflect the opinions of the Texas Sea Grant College Program or the National Oceanic and Atmospheric Administration.
Author information
Authors and Affiliations
Corresponding author
Additional information
Handling Editor: Pierre Dutilleul.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Appendix
Appendix
1.1 Bottom-up and top-down tests for the Gulf of Mexico example
Here, we describe how the hypotheses of bottom-up control and top-down control were tested for the Gulf of Mexico example. Four populations were divided into two groups according to trophic level, the brown shrimp population and the fish group. For the top-down scenario, only the shrimp population was responding to the deviations from the equilibrium relationship, while the fish group was not. The null hypothesis was constructed by forming restrictions on \(\alpha _{(4 \times 1)}\). The dimension of the object is provided in the subscript between parentheses. The indirect parameterization of the restrictions was
where \({\varvec{B}}_{t(4\times 3)}=[{\varvec{0}}_{3,1}\,{\varvec{I}}_3]^\mathrm{T}\), \({\varvec{0}}_{3,1}\) is a 3-by-1 zero vector, and \({\varvec{I}}_3\) is a 3-by-3 identity matrix. Note that from the second to the fourth components of \(\alpha \) were restricted to zero, and thus, there were overall 3 restrictions. In addition, the direct parameterization was
where \({\varvec{A}}_{t(4\times 1)}=[1\,{\varvec{0}}_{1,3}]^\mathrm{T}\) was a vector of length 4, \({\varphi }_t\) was a scalar, and \({\varvec{0}}_{1,3}\) is a 1-by-3 zero vector. The form of the top-down restriction on \(\alpha \) implied \(r\le 1\), because matrix \({\varvec{A}}_t\) had a rank of 1. When there was more than one equilibrium relationship, this identified equilibrium relationship was a linear combination of all the equilibrium relationships. The indirect parameterization picked out parameters that needed to be restricted, while direct parameterization directly specified free-varying parameters to be estimated and fixed restricted parameters to zero.
For the bottom-up scenario, only the fish group was responding to changes in the equilibrium relationship. This hypothesis was constructed by restricting the adjustment coefficient for the brown shrimp to zero, and those coefficients for the fish group were allowed to vary freely. The indirect parameterization of the restriction was
where each row of \({\varvec{B}}^\mathrm{T}_{b(4\times r)}\) was \([1\,{\varvec{0}}_{1,3}]\), and the direct parameterization was
where \({\varvec{A}}_{b(4\times 3)}=[{\varvec{0}}_{3,1}\,{\varvec{I}} _3]^\mathrm{T}\), and \(\varvec{\varphi }_{b(3\times r)}\) was a matrix of coefficients. The form of bottom-up restrictions implied \(r\le 3\), because matrix \({\varvec{A}}_b\) had a rank of 3. The parameter estimation procedure of both tests follows Johansen (1995).
1.2 Small-sample properties of the method with simulated data
To explore the statistical properties of the method presented in the main text, a modified discrete-time predator–prey model with ratio-dependent predation (Zhou et al. 2013) was used. The data-generating process is a bottom-up controlled community. The prey population, V, follows an independent random walk, and the predator population, P, depends on the prey population through a numerical response,
where, \(\epsilon _t\) and \(\upsilon _t\) are independent normal random variables, \(\alpha \) and \(\beta \) are the coefficients in the numerical response, and c is the conversion rate of consumed prey by the predator. Parameters used are \(a=3.5\), \(b=0.25\), \(c=0.6\), \(\alpha =6\), \(\beta =7\), \(\sigma (\epsilon )=0.1\), \(\sigma (\upsilon )=0.01\) and the initial population densities are \(V_0=2\), \(P_0=0.5\).
First, predator–prey time series data of a short (25-year), medium (50-year) and long (100-year) length were simulated. Second, the co-integration test was applied to the simulated dataset to identify the number of species interactions. As a sequential testing procedure, the first step of the co-integration test tests the null hypothesis of less than or equal to one co-integration relation in the data, and the second step tests the null hypothesis of no co-integration relation. Then, assuming there was an interaction between this population pair, the tests of bottom-up forcing and top-down forcing were conducted. Both of these test statistics follow an asymptotic \(\chi ^2\) distribution with 1 degree of freedom. We repeated this process 1000 times for each time series length (short, medium and long) to calculate the error rates of the tests for the 3 different lengths.
The result is as follows (Table 6): The power of the first step of the co-integration test was low for the short time series, but it improved monotonically with increasing length. The type I error rate of the second step of the co-integration test corresponded reasonably to its asymptotic level across all lengths. The type I error rate of the bottom-up test exceeded its asymptotic level for all lengths, and there was a gradual drop with increasing length. The power of the top-down test was good even for the short time series.
A couple of things can be learned from this simulation exercise. First, the small sample properties of the tests also depend on the form of density dependence between two populations, i.e., if a different numerical response was used to generate data, results would be different (we tried different sets of parameters for the numerical response). Second, it should be noted that for the data generation we used an arbitrary nonlinear numerical response, and for testing we used a linear approximation, which sacrifices performance, but those tests still performed reasonably well on the medium and long-length time series. In addition, the lack of power in the co-integration test for short time series suggests that some species interactions may not be adequately picked up for the Gulf of Mexico example shown in the text, which has a time series length of 26 and potentially more complicated forms of species interactions.
1.3 Trophic interactions in the stationary component of the model
After the non-stationary component of the model has been determined (matrix \(\beta \)), the remaining coefficients of the VECM can be estimated through ordinary least squares regression. The bottom-up and top-down tests presented in the text examined the significance of trophic interactions in the long-run component. The significance of trophic interactions in the short-run component can be examined through the significance of the elements of matrix \(\varvec{\varTheta }_i\) in Eq. 1 of the main text. We ran multiple linear models on data from all the zones, and found in the short-run component 1) significant bottom up forcing from zones 13 (\(p=0.02\)), 16 (\(p=0.03\)), 18 (\(p=0.02\)), 20 (\(p<0.01\)) and 21 (\(p=0.01\)), and 2) significant top-down forcing from zone 18 (\(p=0.03\)) and 21 (\(p<0.01\)).
1.4 Biological characteristics for Atlantic croaker, silver seatrout and sand seatrout
Atlantic croaker, M. undulatus, was found to be the most common finfish species caught by shrimp trawls both by weight and by number (Bryan et al. 1982). During the development of M. undulatus, dietary shifts occur during three active feeding stages (Darnell 1961). The diet of individuals 125–325 mm in total length consists of macroinvertebrates, including commercially important penaeid shrimps (Darnell 1961). A study in Chesapeake Bay found benthic organisms comprised 4.3 % of the diet of M. undulatus (Nye 2008).
Silver seatrout, Cynoscion nothus, are abundant in the nearshore waters of the northern Gulf of Mexico (Hildebrand and Schroeder 1928; Moore et al. 1970), and they are among the most common species caught in industrial bottom fisheries and as bycatch in shrimp fisheries (Roithmayr 1965; Warren 1981). In sampling, larger silver seatrout appear more susceptible to trawling during the day (DeVries and Chittenden 1982). Adult silver seatrout show seasonal distribution patterns in nearshore and offshore waters in the Gulf of Mexico (DeVries and Chittenden 1982; Gunter 1938; Miller 1965). Fish and shrimp are found to be the primary foods for silver seatrout in the northern Gulf (Rogers 1977; Overstreet and Heard 1982; Sheridan et al. 1984). Also, there is a shift in the diet composition of silver seatrout with body length (Rogers 1977).
Sand seatrout, Cynoscion arenarius, are sometimes difficult to distinguish from silver seatrout. The sand seatrout is one of the most abundant fish in the estuarine and nearshore waters of the Gulf (Gunter 1945; Christmas and Waller 1973), and it is also a major component of the bottom fisheires and as bycatch in the shrimp fisheries (Roithmayr 1965; Sheridan et al. 1984). In sampling, sand seatrout are more susceptible at night than in daytime during May and June in Mississippi Sound (Warren 1981). Silver seatrout were found to be more common in shallower waters, while sand seatrout were more abundant farther offshore (Ginsburg 1931), and Miller (1965) suggested that the distribution of sand seatrout and silver seatrout overlapped at water depths of 5 to 16 m. In the dietary analysis of sand seatrout from the Gulf of Mexico, fish components predominate (Reid 1954, 1955; Reid et al. 1956; Springer and Woodburn 1960; Sheridan and Livington 1979; Sheridan 1979). Crustaceans are also regularly eaten by sand seatrout (Moffett et al. 1979; Overstreet and Heard 1982; Sheridan et al. 1984).
1.5 Delta generalized linear models
We adopted delta generalized linear modelling (GLM) to extract annual abundance indices from the raw CPUE data. This method is commonly used in the Gulf of Mexico region. Here, the sampling procedure was modeled as a two-step process: first, positive catches follow a binomial distribution (later referred to as the occurrence model); then, given the catch rate is positive, the log-transformed CPUE has a normal distribution (later referred to as the abundance model). The occurrence model with a logit link function was
where \(\pi _i\) was the probability that the ith sampling location fell within the distribution range, \({\varvec{x}}_i\) was a vector of covariates, and \({\varvec{\beta }}\) was a vector of parameters to estimate. The abundance model was a mixture of two distributions: given sampling within range, the CPUE was modeled as
where, for ith sampling station, \({\varvec{z}}_i\) was a vector of covariates, and \({\varvec{\gamma }}\) was a vector of parameters to estimate.
The raw CPUE data were organized as follows: each row represented an individual survey sample, and in the columns were species-specific log-transformed CPUE (number of individuals caught/min) and covariates, including sampling year, statistical zone, season (summer and fall), depth, time of the day (day and night), water temperature, dissolved oxygen, salinity, number of minutes fished and the designation of the survey ship (NMFS, TX and AL). Two data sets were generated from the raw CPUE dataset, one showing the presence or the absence of those four species at all the sampling stations (data for the occurrence model), and the other one showing the log-transformed CPUEs from stations with positive catches (data for the abundance model). We then modeled the occurrence data and the abundance data separately. For both models, covariates for selection included year, season (summer and fall), depth, time of the day (day and night), water temperature, dissolved oxygen, salinity and the designation of the survey ship (NMFS, TX and AL). In addition, the number of minutes fished was also included for selection in occurrence models. A stepwise backward selection procedure was used for model selection. The selected models for both occurrence and abundance data were used to estimate yearly abundance indices for each statistical zone for each of the 26 years.
Rights and permissions
About this article

Cite this article
Zhou, C., Fujiwara, M. & Grant, W.E. Finding regulation among seemingly unregulated populations: a practical framework for analyzing multivariate population time series for their interactions. Environ Ecol Stat 23, 181–204 (2016). https://doi.org/10.1007/s10651-015-0334-7
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10651-015-0334-7