
Abstract
We investigate the use of spinors to describe the secular evolution of quasi-Keplerian systems. Evaluating their Poisson brackets, we show that the components of a properly chosen spinor are canonical variables. We illustrate this formalism using the classical problems of the orbital motion about an oblate planet and the Kozai–Lidov mechanism. Although the present formalism breaks down for circular or radial orbits, it may be of some practical utility in numerical recipes.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The three-body problem is one of the oldest open problems in astronomy (Valtonen and Karttunen 2006). Although it can be applied as a good model to many astrophysical phenomena ranging from the dynamics of minor planets (Kozai 1962) and satellites (Lidov 1962) to that of supermassive black holes (Naoz et al. 2019; Alexander 2017), it cannot be generically solved.Footnote 1 It is non-integrable, i.e. chaotic (Masoliver and Ros 2011).
There exist a couple of approaches to predict the future of triple systems: (i) one directly integrates the equations of motion numerically (Heggie and Hut 2003; ii) one derives the probability distributions of the orbital elements as a result of the chaotic three-body evolution (e.g. Stone and Leigh 2019; iii) one uses approximations (Valtonen and Karttunen 2006). A frequently used approximation is the restricted three-body problem in which one of the three bodies has zero mass (Szebehely 1967). Another possibility is the hierarchical problem in which a tight binary is perturbed by a more massive object (Naoz 2016). The hierarchical three-body problem puts the focus on the system’s evolution on secular timescales, i.e. timescales much longer than the orbital period. It is achieved by averaging the system’s Hamiltonian, for example, using the von Zeipel transformation (Ito and Ohtsuka 2019). The secular evolution equations for the orbit can then be obtained from the averaged Hamiltonian in different ways.
A common method is Lagrange’s (non-canonical) planetary equations of motion which use the standard orbital elements (e.g. Murray and Dermott 1999). However, the associated equations suffer from vanishing denominators if the eccentricity is either zero or unity, or if the inclination is zero (Valtonen and Karttunen 2006).
In order to cure the aforementioned problems, one can introduce another set of equations, named after Milankovitch (Milankovitch 1939). More precisely, one defines \(\textbf{L}\) as the angular momentum vector and \(\textbf{K}\) (the pericenter vector) as the vector which points to the orbit’s pericenter and whose magnitude is equal to the angular momentum. The (non-canonical) evolution equations then read
where Einstein summation is implied for the Latin indices, which run from 1 to 3. Here, \(\mathcal {H}\) is the system’s Hamiltonian and \(\{\cdot ,\cdot \}\) is the Poisson bracket
with f and g arbitrary functions of (q, p) , the canonical coordinates and momenta (Goldstein et al. 2002). These equations are not limited to the three-body problem, i.e. \(\mathcal {H}\) is arbitrary. The standard version of Milankovitch equations uses the Runge–Lenz–Laplace or eccentricity vector instead of our pericenter vector (e.g. Tremaine et al. 2009; Rosengren and Scheeres 2014). Some other works (e.g. Fouvry et al. 2022) use the Klein variables (Klein 1924). Via the use of Pfaffian forms, Reference Musen (1964) found a canonical set of vectors which reformulates the Milankovitch equations as Hamilton’s equations of motion. The reason for our present choice is clarified in Sect. 2.
For a bound orbit, the Poisson brackets of these vectors are
with \(\epsilon _{abc}\) the Levi–Civita antisymmetric tensor. We check these in “Appendix A” using the canonical Delaunay variables. Inserting these expressions into Eqs. (1) yields
Hereafter we restrict ourselves to secular evolution. An essential feature of it is that the semi-major axis is constant due to the orbit-averaging over the (fast) mean anomaly (Morbidelli 2002). For a time-independent averaged Hamiltonian, i.e. when the total energy is constant as well, we have two conserved quantities. These are manifested in the first integrals of motion of Eqs. (4)
with “\(\cdot \)” the usual scalar product. The associated constants are set to zero because \(\textbf{L}\) and \(\textbf{K}\) have the same magnitudes and are perpendicular to each other, by definition. These two constraints reduce the number of degrees of freedom from 6 to 4. Given the geometric meaning of the vectors involved, it is understood that Eqs. (5) hold in the non-averaged case, too.
Contrary to the standard vector algebra just presented, Hestenes (1983, H83 hereafter) suggested an alternative formulation for celestial mechanics, namely geometric algebra. In doing so, H83 derives the equations of motion for a spinor instead of a pair of vectors. We now revisit this result and rewrite the associated equations of motion using the Poisson brackets of spinors. The letter is structured as follows. Section 2 introduces spinors and expresses the equations of motion with them. Section 3 applies the spinorial equations to the pedagogical case of the secular dynamics around an oblate planet. Section 5 summarises the benefits and disadvantages of the spinorial formalism.
2 The spinorial Milankovitch equations
First, let us take three orthonormal unit vectors \(\varvec{\sigma }_a \in {\mathbb {R}}^{3} \) with \(a=1,2,3\). Let us then define the geometric product between two of them as
where “\(\cdot \)” is again the usual (symmetric) dot product giving a scalar, while “\(\wedge \)” is an antisymmetric product giving a bivector. From this, it follows that
for \(a\ne b\) and
where 1 is a scalar and the geometric product is not denoted explicitly.Footnote 2 Using the associativity of the geometric product, one can easily show that
which motivates a notation similar to that of the complex unit, namely \(\varvec{\sigma }_1 \varvec{\sigma }_2 \varvec{\sigma }_3 = \textrm{I}\), a trivector. Now we can define a spinor and its conjugate via
where \(x_{0 \le \mu \le 3}\) are real. As illustrated in “Appendix B,” spinors can be efficiently used to describe rotations.Footnote 3 Along the same line, “Appendix C” investigates the use of bivectors in the context of Milankovitch equations.
Let us now demand that (i) the norm of the spinor, \(\underline{s}\), is related to the angular momentum via
and that (ii) it rotates the basis vectors \(\varvec{\sigma }_1\) and \(\varvec{\sigma }_3\) to the direction of \(\textbf{K}\) and \(\textbf{L}\), respectively (we follow H83 for that convention), i.e.
These equations can be recast as
Matching the prefactors of the \(\{ \varvec{\sigma }_i \}\) on both sides finally yields
The action of the spinor on the basis vectors is to rotate and multiply both vectors by \(4\Vert \textbf{L}\Vert \). Such an operation cannot provide us with two vectors of different magnitudes, hence our choice in Sect. 1 of using the pericenter vector rather than the eccentricity one.
We now express the Hamiltonian with the spinor \({ \mathcal {H}(\underline{s}) = \mathcal {H}(x_0,x_1,x_2,x_3) }\). Analogously to the vectorial case in Eqs. (1), we have
where Greek indices run from 0 to 3. The task is to calculate the Poisson brackets of the \({ \{ x_{\mu } \} }\), just like for \({(\textbf{L}, \textbf{K})}\) in Eqs. (3). Substituting Eqs. (14) into the Poisson brackets from Eqs. (3) gives us
Putting these brackets back into Eq. (15) finally yields the equations of motion
These are the spinorial analogues of Milankovitch Eq. (4). We make two remarks about them. First, the transformations in Eqs. (14) have the same structure as the Kustaanheimo–Stiefel (KS) transformation in the regularisation of the 3-dimensional Kepler problem (Stiefel and Kustaanheimo 1965; Waldvogel 2006). Here, they are applied to both the angular momentum and pericenter vectors. Second, the set \({ \{ x_{\mu } \} }\) is symplectic, i.e. it obeys the canonical Poisson relations. Phrased differently, Eqs. (17) are simply Hamilton’s canonical equations with \({(x_{1}, x_{3})}\) being coordinates and \({(x_{2}, x_{0})}\) their respective conjugate momenta.Footnote 4
3 Motion around an oblate planet
As a simple demonstration, we follow H83 and apply the spinorial formalism to the secular dynamics of a satellite around an oblate planet.Footnote 5 The averaged perturbing Hamiltonian is Beletsky (2001)
with C a constant. Here, L is the satellite’s angular momentum and \(L_\parallel \) its projection on the planet’s axis of rotation. When expressed with the spinor components from Eqs. (14), they read
with \(\textbf{n}=[n_1,n_2,n_3]\) the unit vector along the planet’s rotational axis.Footnote 6 After injecting the Hamiltonian from Eq. (18), Eqs. (17) have an exact solution in closed form (see “Appendix D”). Assuming \(\textbf{n}=[0,0,1]\), it reads
with \({ \delta _{\pm } }\) some given phases, the amplitudes \({ A_{\pm } }\) satisfying the constraints
and the constant frequencies
When substituting into Eqs. (14), we recover that both \(\textbf{L}\) and \(\textbf{K}\) precess with constant magnitudes (Beletsky 2001). The critical inclination (Lubowe 1969) follows from the resonance condition \(\omega _{+} = \omega _{-}\).
4 Kozai–Lidov oscillations
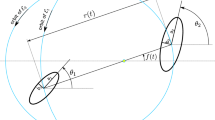
To test our formalism against a numerical example, we now investigate the secular dynamics of a tight binary with a test particle, perturbed by a distant third object. Truncating the Hamiltonian at third order in the semi-major axes ratio, the dynamics of the inner binary follows from the Hamiltonian [see Eqs. (2) and (3) in Katz et al. 2011]
where \({ \mathcal {H}_{\textrm{q}} }\) (resp. \(\mathcal {H}_{\textrm{o}}\)) is the quadrupolar (resp. octupolar) contribution. They read
where \(\textbf{L}\) is the inner binary’s specific angular momentum and \({ \textbf{D} = \sqrt{1 - L^{2}} \textbf{K} / L }\) its eccentricity vector (see Eq. (9.133) of Goldstein et al. 2002). The constants are
where G is the gravitational constant, \(m_{\textrm{per}}\), \(a_{\textrm{per}}\) and \(e_{\textrm{per}}\) are, respectively, the mass, semi-major axis and eccentricity of the distant perturber, and \(a_{\textrm{in}}\) the semi-major axis of the tight binary.
Using the Hamiltonian from Eq. (23), we integrated Eqs. (17) numerically. The solution is shown in Fig. 1. It exhibits the well-known Kozai–Lidov oscillations and perfectly agrees with the solution obtained from an independent integration using the code from Naoz et al. (2013).

Numerical solution of Eqs. (17) for the Hamiltonian from Eq. (23). The perturber’s (fixed) orbital parameters are \({ m_{\textrm{per}} = 1 \, M_\odot }\), \({ a_{\textrm{per}} = 5 \, \textrm{au} }\), \({ e_{\textrm{per}}= 0 }\) and \({ g_{\textrm{per}} = 0 }\), with g the argument of pericenter, see “Appendix A.” The inner test particle orbits around an object of mass \({ M = 0.001 \, M_{\odot } }\), with semi-major axis \({ a_{\textrm{in}} = 0.1 \, \textrm{au} }\). At the initial time, the inner orbit’s parameters are set to \({ e_{\textrm{in}} = 0.1 }\), \({ g_{\textrm{in}} = 0 }\), \({ I_{\textrm{in}} = 50^\circ }\) and \({ h_{\textrm{in}} = 0 }\), with I and h the inclination and argument of node, respectively. The integration of the spinorial equations of motion was performed using the classical fourth-order Runge–Kutta scheme (see, e.g. Hairer et al. 2008) with timestep \({ \delta t = 0.1\,\textrm{yr} }\), giving a final relative error in the total energy of order \({10^{-13}}\). The time evolution is compared with the use of the independent code from Naoz et al. (2013)
5 Discussion and summary
We followed H83 in using spinors to describe quasi-Keplerian systems on secular timescales. In that case, an orbit-averaged Keplerian orbit is represented by a single spinor rather than two vectors. The Poisson brackets of these spinor components turn out to be remarkably simple: they are canonically conjugate variables. As such, the spinorial counterpart of the vectorial Milankovitch equations is thus a set of standard canonical Hamiltonian equations.
The spinorial formalism has difficulties if the orbit is either circular or radial, which limits its applicability. In the circular case, it has an extra degree of freedom associated with the orientation of the pericenter vector, which is unphysical at circular orbits. In the radial case, the spinor is identically zero (see Eq. 19a), and one loses the information about the orbit’s orientation.
Future work will be devoted to testing alternative normalisations other than Eq. (11) that could help at extreme eccentricities, as well as using the bivector formulation from “Appendix C.” We will also explore if the formalism above could be used efficiently in numerical integrations (see, e.g. McLachlan et al. 2014).
Notes
The notation \(\varvec{\sigma }_a\) is motivated by the fact that the Pauli matrices, which satisfy exactly the same algebra, are usually denoted in this way too.
The matching between \({ \{ x_{\mu } \} }\) and the canonical variables can be reordered simply by using a different choice of basis vectors in Eqs. (12).
See Ref. Rosengren (2014) for another interesting solution based on the use of second-order tensors (dyads).
These expressions follow from Eqs. (2.119–120) in Murray and Dermott (1999).
Contrary to Eqs. (4), here we use the eccentricity vector, \(\textbf{D}\), rather than the pericenter one, \(\textbf{K}\).
References
Alexander, T.: Stellar dynamics and stellar phenomena near a massive black hole. ARA &A 55(1), 17–57 (2017)
Beletsky, V.V.: Essays on the Motion of Celestial Bodies. Birkhäuser, Basel (2001)
Coddens, G.: Spinors for Everyone. HAL, cea-01572342 (2017)
Diacu, F.: The solution of the \(N\)-body problem. Math. Intell. 18, 66–70 (1997)
Fouvry, J.-B., Dehnen, W., Tremaine, S., Bar-Or, B.: Secular dynamics around a supermassive black hole via multipole expansion. Astrophys. J. 931(1), 8 (2022)
Goldstein, H., Poole, C., Safko, J.: Classical Mechanics. Addison-Wesley, San Francisco (2002)
Hairer, E., Wanner, G., Nørsett, S.P.: Solving Ordinary Differential Equations I. Springer, Heidelberg (2008)
Hamilton, W.R.: On quaternions; or on a new system of imaginaries in algebra. Philos. Mag. J. Sci. 25(169), 489–495 (1844)
Heggie, D., Hut, P.: The Gravitational Million-Body Problem. Cambridge University Press, Cambridge (2003)
Hestenes, D.: Vectors, spinors, and complex numbers in classical and quantum physics. Am. J. Phys. 39(9), 1013–1027 (1971)
Hestenes, D.: Celestial mechanics with geometric algebra. Celest. Mech. Dyn. Astron. 30(2), 151–170 (1983)
Hestenes, D.: New Foundations for Classical Mechanics. Kluwer Academic Publishers, Amsterdam (2002)
Ikemori, H., Kitakado, S., Matsui, Y., Sato, T.: Runge-Lenz vector as a 3D projection of SO(4) moment map in \(\mathbb{R} ^4\times \mathbb{R} ^4\) phase space. J. Phys. A 56(22), 225204 (2023)
Ito, T., Ohtsuka, K.: The Lidov–Kozai oscillation and Hugo von Zeipel. Monogr. Environ. Earth Planets 7(1), 1–113 (2019)
Katz, B., Dong, S., Malhotra, R.: Long-term cycling of Kozai–Lidov cycles: extreme eccentricities and inclinations excited by a distant eccentric perturber. Phys. Rev. Lett. 107(18), 181101 (2011)
Klein, O.: Über die gleichzeitige Wirkung von gekreuzten homogenen elektrischen und magnetischen Feldern auf das Wasserstoffatom. I. Z. Phys. 22, 109 (1924)
Kozai, Y.: Secular perturbations of asteroids with high inclination and eccentricity. Astron. J. 67, 591–598 (1962)
Lidov, M.L.: The evolution of orbits of artificial satellites of planets under the action of gravitational perturbations of external bodies. Planet. Space Sci. 9(10), 719–759 (1962)
Lubowe, A.G.: How critical is the critical inclination? Celest. Mech. Dyn. Astron. 1(1), 6–10 (1969)
Masoliver, J., Ros, A.: Integrability and chaos: the classical uncertainty. Eur. J. Phys. 32(2), 431–458 (2011)
McLachlan, R.I., Modin, K., Verdier, O.: Symplectic integrators for spin systems. Phys. Rev. E 89(6), 061301 (2014)
Milankovitch, M.: Über die verwendung vektorieller bahnelemente in der störungsrechnun. Bull. Serb. Acad. Math. Nat. A 6 (1939)
Morbidelli, A.: Modern Celestial Mechanics. Taylor & Francis, London (2002)
Murray, C.D., Dermott, S.F.: Solar System Dynamics. Cambridge University Press, Cambridge (1999)
Musen, P.: On the Application of Pfaff’s Method in the Theory of Variation of Astronomical Constants. NASA, Washington (1964)
Naoz, S.: The eccentric Kozai–Lidov effect and its applications. Annu. Rev. Astron. Astrophys. 54, 441–489 (2016)
Naoz, S., Farr, W.M., Lithwick, Y., Rasio, F.A., Teyssandier, J.: Secular dynamics in hierarchical three-body systems. MNRAS 431(3), 2155–2171 (2013)
Naoz, S., Silk, J., Schnittman, J.D.: Dark matter signatures of supermassive black hole binaries. Astrophys. J. Lett. 885(2), 35 (2019)
Oliver, D.: The Shaggy Steed of Physics: Mathematical Beauty in the Physical World. Springer, New York (2004)
Rosengren, A.J.: Long-term dynamical behavior of highly perturbed natural and artificial celestial bodies. PhD thesis, University of Colorado, Boulder (2014)
Rosengren, A.J., Scheeres, D.J.: On the Milankovitch orbital elements for perturbed Keplerian motion. Celest. Mech. Dyn. Astron. 118(3), 197–220 (2014)
Stiefel, E., Kustaanheimo, P.: Perturbation theory of Kepler motion based on spinor regularization. J. für Reine Angew. Math. 218, 204–219 (1965)
Stone, N.C., Leigh, N.W.C.: A statistical solution to the chaotic, non-hierarchical three-body problem. Nature 576(7787), 406–410 (2019)
Sundman, K.: Mémoire sur le problème des trois corps. Acta Math. 36, 105–179 (1912)
Szebehely, V.: Theory of Orbits. The Restricted Problem of Three Bodies, Academic Press, New York (1967)
Tremaine, S., Touma, J., Namouni, F.: Satellite dynamics on the Laplace surface. Astron. J. 137(3), 3706–3717 (2009)
Valtonen, M., Karttunen, H.: The Three-Body Problem. Cambridge Univ. Press, Cambridge (2006)
Waldvogel, J.: Quaternions and the perturbed Kepler problem. Celest. Mech. Dyn. Astron. 95(1–4), 201–212 (2006)
Acknowledgements
This work is partially supported by grant Segal ANR-19-CE31-0017 of the French Agence Nationale de la Recherche, and by the Idex Sorbonne Université.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: The canonical basis of Delaunay variables
Following the notation from Murray and Dermott (1999), the angular momentum and pericenter vectors can be expressed on the canonical basis of Delaunay variables via
with g the argument of pericenter, G the magnitude of the angular momentum, h the argument of node, H the third component of the angular momentum vector, and i the inclination.Footnote 7 The Poisson brackets of the Delaunay variables are
while all the others are zero.
Delaunay variables are also suitable for expressing the spinor components defined in Eqs. (14), via
Appendix B: Spinors and rotations
Spinors are powerful tools to treat rotations. Any rotation of a vector \(\textbf{v}\) can be executed as (see Eq. 2.1 in H83)
In order to illustrate it, let us consider the unit vector \(\varvec{\sigma }_1\). The spinor that rotates it by \(\pi /2\) around \(\varvec{\sigma }_3\) is
Indeed, some easy algebra using Eqs. (7)–(8) leads to
This matches with the geometric intuition since the \({ \{ \varvec{\sigma }_{a} \} }\) are orthogonal to one another. A general rotation by an angle \(\Vert \varvec{\theta }\Vert \) around an axis \(\varvec{\theta }\) is given by (see Eq. 2.3 in H83)
where H83 normalises the spinor to unity in Eq. (2.2) therein.
H83 derives an evolution equation for the spinor (see Eqs. 3.1–3.3 therein), namely
with \(\varvec{\omega }\) the angular velocity of the rotation (see Eq. 3.7 in H83). It has the simple formal solution
i.e. a general rotation as in Eq. (B10).
We finally point out that the spinors of 3D rotations are formally identical to Hamilton quaternions (Hestenes 1983). Indeed, \(-\textrm{I}\varvec{\sigma }_1\), \(-\textrm{I}\varvec{\sigma }_2\) and \(-\textrm{I}\varvec{\sigma }_3\) obey the same algebra as Hamilton’s \( \{ i, j, k \}\), respectively (Hamilton 1844).
Appendix C: Milankovitch equations with bivectors
In Sect. 2, we introduced the basic concepts of geometric algebra. We now apply it to bivectors. Similarly to vectors, we consider two arbitrary bivectors u and v, and we define the dot and wedge product between them as the symmetric and antisymmetric part of the geometric product, namely
Let us now consider four orthonormal unit vectors \({ \varvec{\sigma }_a \in {\mathbb {R}}^{4}} \) with \(a=1,2,3,4\). We can construct a total of 6 unit bivectors out of them.Footnote 8 The key point is to note that their respective wedge products follow a structure similar to the one of the Poisson brackets of the angular momentum and eccentricity vectors \({ (\textbf{L}, \textbf{D}) }\). For example, one has
This motivates then the correspondences
Similarly, we are led to defining the bivector
along with a \(\nabla _{v}\) operator following the same pattern
Milankovitch Eqs. (4) then becomeFootnote 9
i.e. a “rotation in bivector space.” This equation has a first integral, \({ \textrm{d}(v \cdot v) / \textrm{d}t = 0 }\), associated with the conserved quantity
The two terms in this equation are conserved independently, in agreement with, e.g. Eq. (17) of Tremaine et al. (2009).
Appendix D: Solution of the spinorial equations
Substituting Eq. (18) into the spinorial equations of motion (17) yields
Applying Eqs. (D20) to Eqs. (19), one gets
i.e. both the total angular momentum and its projection on the rotation axis are conserved. Using this, Eqs. (D20) become a set of linear differential equations with an antisymmetric matrix. It results in purely imaginary eigenvalues, i.e. the solution is oscillatory. After picking up a particular reference frame like in Sect. 3, the equations of motion simplify to
using the abbreviations from Eq. (22). These equations can be immediately integrated to give Eqs. (20).
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Deme, B., Fouvry, JB. Milankovitch equations with spinors. Celest Mech Dyn Astron 135, 47 (2023). https://doi.org/10.1007/s10569-023-10162-3
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10569-023-10162-3