
Abstract
We propose a method to account for the Earth oblateness effect in preliminary orbit determination of satellites in low orbits with radar observations. This method is an improvement of the one described in Gronchi et al. (Mon Not R Astron Soc 451(2):1883–1891, 2015b), which uses a pure Keplerian dynamical model. Since the effect of the Earth oblateness is strong at low altitudes, its inclusion in the model can sensibly improve the initial orbit, giving a better starting guess for differential corrections and increasing the chances to obtain their convergence. The input set consists of two tracks of radar observations, each one composed of at least four observations taken during the same pass of the satellite. A single observation gives the topocentric position of the satellite, where the range is very accurate, while the line-of-sight direction is poorly determined. From these data, we can compute by a polynomial fit the values of the range and range rate at the mean epochs of the two tracks. In order to obtain a preliminary orbit, we wish to compute the angular velocity, which is the rate of change of the line of sight. In the same spirit of Gronchi et al. (Mon Not R Astron Soc 451(2):1883–1891, 2015b), we also wish to correct the values of the angular measurements, so that they fit the selected dynamical model if the same holds for the radial distance and velocity. The selected model is a perturbed Keplerian dynamics, where the only perturbation included is the secular effect of the \(J_2\) term of the geopotential.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The growth in the number of space debris orbiting the Earth has increased the interest for the studies of new orbit computation methods, for example Farnocchia et al. (2010), Gronchi et al. (2015a), and of the dynamical properties of Earth satellites, for example Celletti and Galeş (2018), Daquin et al. (2016), Rosengren and Scheeres (2013). Correlating short arcs of observations that belong to the same object and initial orbit determination (IOD) are of crucial importance for surveillance of the current population of space debris. In the case of optical measurements, this problem has been addressed by many authors using different techniques (see, e.g., Siminski et al. 2014 and references therein). On the other hand, only a few methods have been proposed for the case of radar observations (Vananti et al. 2017). In this paper, we investigate an IOD method that is conceived to compute orbits of Earth satellites at low altitudes (LEO) with radar observations.
Let us assume that each radar measurement at epoch t is composed of a precise value of the range \(\rho \) (with standard deviation in the order of meters) and poorly determined values of the topocentric right ascension \(\alpha \) and declination \(\delta \) (with standard deviation for example of 0.2 degrees). The available data are radar tracks of the form
where \(\Delta t=t_{i+1}-t_{i}\) is usually a few seconds and \(m\ge 4\). Given a radar track, we can derive the vector
where \(\bar{\alpha }, \bar{\delta }\) are the mean values while \(\rho , \dot{\rho }\) can be obtained through a cubic fit because the measurements of the range are more precise.
We describe the osculating two-body orbit of the satellite by spherical coordinates (also known as attributable coordinates)
Therefore, given the data in (2), to compute an orbit, we need the values of \(\dot{\alpha }, \dot{\delta }\), which are the unknowns of our orbit determination problem. We want to correlate two radar attributables at two different epochs corrected for the aberration of light,
where c is the speed of light, to determine the values of \(\dot{\alpha }_{1}\), \(\dot{\alpha }_{2}\), \(\dot{\delta }_{1}\), \(\dot{\delta }_{2}\) and compute a preliminary orbit (see Milani and Gronchi 2010).
Assuming that the motion is Keplerian, Taff and Hall (1977) and more recently Farnocchia et al. (2010) proposed to use the conservation of the angular momentum vector and energy to write a polynomial system which is quadratic in the unknowns. Gronchi et al. (2015b) have recently improved this method by allowing for the correction of the values of \(\bar{\alpha }\), \(\bar{\delta }\). For this purpose, they introduce the quantities \({\Delta {\alpha }}\), \(\Delta \delta \), which are unknown small deviations from the mean values \(\bar{\alpha }\), \(\bar{\delta }\):
The deviations \({\Delta {\alpha }}\), \(\Delta \delta \) are called infinitesimal angles. Moreover, in place of the unknowns \(\dot{\alpha },\dot{\delta }\) they use the variables
which are the components of the topocentric velocity of the satellite orthogonal to the line of sight. The orbit at time \({\bar{t}}-\rho /c\) is completely determined by the modified attributable coordinates
We extend the algorithm introduced in Gronchi et al. (2015b), where a two-body approximation is employed, by considering the secular effect of the \(J_{2}\) term of the geopotential in the dynamical model. The Earth oblateness has been already considered by Farnocchia et al. (2010) for the computation of preliminary orbits but without introducing corrections to the angles. Their IOD method is iterative, and at each iteration, the problem has the same algebraic structure as the unperturbed one.
We want to determine the values of the eight unknowns \(({\Delta {\alpha }}_{1},\Delta \delta _{1},\xi _{1},\zeta _{1})\) and \(({\Delta {\alpha }}_{2},\Delta \delta _{2},\xi _{2},\zeta _{2})\) at \({\tilde{t}}_1\), \({\tilde{t}}_2\) from the input dataset:
using the Keplerian integrals evolution, the equations of motion projected onto the line of sight and a suitable version of Lambert’s equation.
2 Notation
Let us denote by \(\mathbf{e}^\rho \) the unit vector corresponding to the line of sight, and by \(\mathbf{q}\) the geocentric position of the observer. Then, the geocentric position of the observed body is
where \(\rho \) is the range. Using as angular coordinates the topocentric right ascension \(\alpha \) and declination \(\delta \) in an equatorial reference frame (e.g., J2000), we have
We introduce the unit vectors
The set \(\{\mathbf{e}^\rho ,\mathbf{e}^\alpha ,\mathbf{e}^\delta \}\) is an orthonormal system. Denoting by \(\dot{\mathbf{r}}\) the geocentric velocity of the satellite, we have
We will use the following different sets of coordinates for the orbits:
that are, respectively, Keplerian, Cartesian, attributable and modified attributable coordinates. Note that the Keplerian elements in (14) have their usual meaning and \(\ell \) denotes the mean anomaly.
We also consider the coordinate changes
and the composite transformation
from \({\mathscr {E}}_\mathrm{kep}\) to \({\mathscr {E}}_\mathrm{att}^*\).
3 The equations of motion
Let us consider Newton’s equation
for the motion of a point mass in the Earth gravity field where the force function U is truncated at the \(J_2\)-term that is
Here, \(r=|\mathbf{r}|\) is the geocentric distance, \(R_\oplus \) is the equatorial radius of the Earth and \(P_2\) is the Legendre polynomial of second degree
The problem defined by Eq. (20) is non-integrable (see Celletti and Negrini 1981). If we average out the short period term in (20), we obtain an integrable system (see Roy 2004) given by
with \(p=a(1-e^2)\) the parameter of the two-body trajectory and \(n=\sqrt{\mu /a^3}\) the mean motion. Note that in the dynamics defined by (23), the elements a, e, I remain constant while the ascending node \(\Omega \), the argument of perigee \(\omega \) and the mean anomaly \(\ell \) change uniformly with time. Equation (23) can be written shortly as
In the following, we shall assume that the observed body is moving according to the integrable dynamics defined by Eqs. (23), (24), and we shall call oblateness effect (or \(J_2\) effect) the deviation from the pure Keplerian motion which is defined by these equations.
To solve our problem, we express the equations of motion in terms of the coordinates \({\mathscr {E}}_\mathrm{att}^*\). First, we write Eq. (24) in Cartesian coordinates \({\mathscr {E}}_\mathrm{car} = (\mathbf{r},\dot{\mathbf{r}})\). We obtain
where
is the transformed vector field. From the expression above, we obtain the acceleration \(\ddot{\mathbf{r}}\) as a function of \({{\mathscr {E}}}_\mathrm{car}\) along the solutions of (25):
As done in Gronchi et al. (2015b) for the pure Keplerian dynamics, we project the perturbed equation of motion (27) along the line of sight \(\mathbf{e}^\rho \) and obtain the equation
with
where \(\eta = \sqrt{\dot{\alpha }^2\cos ^2\delta + \dot{\delta }^2}\) is the proper motion.
Equation (29) can be expressed as a function of the unknown variables \((\Delta \alpha ,\Delta \delta ,\xi ,\zeta )\) using the expressions of \(\mathbf{r},\dot{\mathbf{r}}\) given in (9), (13).
4 The \(J_2\) effect on the two-body integrals
We recall the expressions of the conserved quantities in the Keplerian dynamics, i.e., the angular momentum \(\mathbf{c}\), the energy \(\mathcal {E}\) and the Laplace–Lenz vector \(\mathbf{L}\), as a function of \(\mathbf{r},\dot{\mathbf{r}}\). These quantities can be read as functions of the attributable coordinates \({\mathscr {E}}_\mathrm{att}\) using (9), (13) and
We have
where

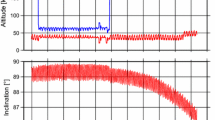
According to the secular effect of the \(J_2\) term [see Eq. (23)], the shape of the conic and its inclination remain unchanged between two epochs \({\tilde{t}}_1\), \({\tilde{t}}_2\). The directions of the angular momentum (\(\hat{\mathbf{c}}\)), line of nodes (\(\hat{\mathbf{n}}\)) and Laplace–Lenz vector (\(\mathbf{L}\)), by contrast, are rotated due to the secular variations \(\Delta \Omega \), \(\Delta \omega \) accumulated by \(\Omega \), \(\omega \) during the time interval \({\tilde{t}}_2-{\tilde{t}}_1\)
Including the \(J_2\) effect in the dynamics, the angular momentum and the Laplace–Lenz vectors are not conserved anymore. However, the following relations hold:
where
Here, we denote by \(R_{\hat{\mathbf{v}}}(\varphi )\) the rotation matrix defined by the rotation of an angle \(\varphi \) around the axis of the unit vector \(\hat{\mathbf{v}}\). Then, the unit vectors \({\hat{\mathbf{z}}}\), \({\hat{\mathbf{c}}}_i\), \(i=1,2\), are given by
Moreover, using Eq. (23), the angular variations \(\Delta \Omega \) and \(\Delta \omega \) are obtained as
where \({\tilde{t}}_1\), \({\tilde{t}}_2\) are the epochs corrected by aberration. We display the \(J_2\) effect on the two-body integrals in Fig. 1.
Remark 1
We can also write
and
with
5 Lambert’s theorem with the \(J_2\) effect
Let us denote by \(\mathcal {L}\) the expression defining Lambert’s equation. In the dynamics given by (23), the mean motion evolves linearly; thus, Lambert’s equation can be written as
with \({\tilde{n}}\) given by the last equation in (23). Moreover, \(k\in \mathbb {N}\) is the number of revolutions in the time interval \([{\tilde{t}}_1,{\tilde{t}}_2]\). The angles \(\beta \), \(\gamma \) are defined by
where \(0\le \beta -\gamma \le 2\pi \) and \(r_1\), \(r_2\) are the distances from the center of force. In (47), the distance
is the length of the chord joining the two positions of the body at epochs \({\tilde{t}}_1\), \({\tilde{t}}_2\) after rotating the osculating ellipse at epoch \({\tilde{t}}_1\) so that it overlaps with the osculating ellipse at epoch \({\tilde{t}}_2\). The rotation \({\tilde{R}}\) is given explicitly by
with \({\tilde{R}}_1\) and \({\tilde{R}}_2\) the transformations from the selected equatorial reference frame to the orbital reference frame at the epochs \({\tilde{t}}_1\) and \({\tilde{t}}_2\), respectively:
where
are the directions of the lines of nodes. For a fixed number of revolutions k, we have four different choices for the pairs \((\beta , \gamma )\) (see Appendix A1 in Gronchi et al. 2015b, for the details).
6 Linkage
We wish to link two sets of radar data of the form (2), with mean epochs \(\bar{t}_i\), \(i=1,2\), and compute one (or more) preliminary orbits. In the following, we use labels 1, 2 for the quantities introduced in the previous sections, according to the epoch. Moreover, let us define \(\varvec{v}_2 =\mathbf{e}^\rho _2\times \mathbf{q}_2\).
Taking into account the \(J_2\) effect, we consider the following system:
of eight equations in the eight unknowns \((\mathbf{X},\,\varvec{\Delta })\), with
Note that the unknowns are divided into two sets so that \(\varvec{\Delta }\) is the vector of infinitesimal angles.
In Gronchi et al. (2015a, b), because the motion is assumed Keplerian, \(\mathbf{X}(\varvec{\Delta })\) is obtained explicitly from the conservation of the angular momentum and energy. The remaining equations are solved for \(\varvec{\Delta }\) using an iterative scheme. In our method, we also separate system (53) into two subsystems which can be solved by a double-iterative scheme. We search for solutions of equation
where
and \(\mathbf{X}(\varvec{\Delta })\) is implicitly defined by the relation
where
Newton–Raphson method is used to compute \(\varvec{\Delta }\) from the iterative formula
Here, taking advantage of the assumed smallness of the solutions \(\varvec{\Delta }\), we consider \(\varvec{\Delta }=\mathbf{0}\) as starting guess. At each iteration for \(\varvec{\Delta }\), we apply the Newton–Raphson method to obtain \(\mathbf{X}(\varvec{\Delta })\) from system (57). Precisely, for \(\varvec{\Delta }=\varvec{\Delta }_h\), we compute \(\mathbf{X}^{(h)} = \mathbf{X}(\varvec{\Delta }_h)\) from the iterative formula
where
For \(h=0\) the starting guess \(\mathbf{X}_0\) is computed from the interpolated values of \(\delta ,\dot{\alpha },\dot{\delta },\rho \) through Equations (6), while for \(h>0\) we set \(\mathbf{X}_0=\mathbf{X}^{(h-1)}\).
Remark 2
Equation (57) is not polynomial in \(\mathbf{X}\), unlike the corresponding equations in Gronchi et al. (2015b).
7 Computing \(\mathbf{X}\), \({\varvec{\Delta }}\)
The algorithm to compute the vectors \(\mathbf{X}\), \(\varvec{\Delta }\) that satisfy Eq. (53) consists of two nested Newton–Raphson methods. Starting from \(\varvec{\Delta }_0=\mathbf{0}\), we determine the vector \(\mathbf{X}^{(0)}\) such that \(\mathbf{J}(\mathbf{X}^{(0)},\varvec{\Delta }_0)=\mathbf{0}\), by applying the Newton–Raphson formula (60), wherein \(\mathcal{J}(\mathbf{X})=\mathbf{J}(\mathbf{X},\varvec{\Delta }_0)\). Then, after computing the number of revolutions k required in Lambert’s equation (46), by
where n is the mean motion and \(\left\lfloor x\right\rfloor \) denotes the integer part of x, we make the first iteration of the outer Newton–Raphson method through Eq. (59), wherein \(\mathcal{G}(\varvec{\Delta }_0)=\mathbf{G}(\mathbf{X}^{(0)},\varvec{\Delta }_0)\). The iterations in \(\varvec{\Delta }\) are carried out until for some \(h\ge 1\) the magnitude of the difference \(\varvec{\Delta }_h-\varvec{\Delta }_{h-1}\) is smaller than a suitable tolerance. Finally, \(\mathbf{X}^{(h)}\) is obtained by the iterative formula (60), and the solution of (53) is given by the pair of vectors \(\mathbf{X}^{(h)},\varvec{\Delta }_h\).
In Eq. (55), the components of the vector \(\mathbf{G}(\mathbf{X},\varvec{\Delta })\) are similar to the ones of the corresponding vector in Gronchi et al. (2015b). However, the following differences occur:
-
(i)
in place of the angular momentum conservation law, we have Eq. (36);
-
(ii)
in \(\mathcal {K}\) at epochs \({\tilde{t}}_1\), \({\tilde{t}}_2\), the term \(\tilde{\mathbf{y}}\cdot \mathbf{e}^\rho \) replaces the radial component of the Keplerian force, i.e., \(-\mu \mathbf{r}\cdot \mathbf{e}^\rho /|\mathbf{r}|^3\);
-
(iii)
in place of the Laplace–Lenz conservation law, we have Eq. (38);
-
(iv)
in \(\mathcal {L}\), the quantity \({\tilde{n}}\) takes a different expression from the mean motion n, coming from the dynamical model (23). Moreover, the length of the chord is computed in a different way; see (48).
To search for the values of \(\varvec{\Delta }\) that solve Eq. (55), we have to compute the first derivatives of \(\mathcal{G}(\varvec{\Delta })\) with respect to \(\varvec{\Delta }\), appearing in (59), that is
From the implicit function theorem applied to Eq. (57), we have
Since these computations are similar to the ones reported in Gronchi et al. (2015b, Sect. 7), we describe below only the differences coming from the adopted dynamical model.
7.1 The derivatives of \(R_c\mathbf{c}_1-\mathbf{c}_2\), \(\mathcal {E}_1-\mathcal {E}_2\)
The derivatives of \(R_c\mathbf{c}_1-\mathbf{c}_2\) with respect to a component x of the vectors \(\mathbf{X}\), \(\varvec{\Delta }\) can be written as
We have
where
and the expressions of \(\frac{\partial {\dot{\Omega }_1}}{\partial x}\) are reported in “Appendix C”.
Considering the angular momentum, we get
The derivatives with respect to \(\varvec{\Delta }\) are computed through the intermediate variables \(\mathbf{e}^\rho _i\), \(\mathbf{e}^\alpha _i\), \(\mathbf{e}^\delta _i\), \(i=1,2\). After introducing the vector
we can write
with
where \(O_3\), \(I_3\) denote the \(3\,\times \,3\) zero and identity matrix, respectively. Note that \(S(\mathbf{a})\) is the skew-symmetric matrix associated with a vector \(\mathbf{a}=(a_1,a_2,a_3)^\mathrm{T}\) by
that is
Concerning the energy, we haveFootnote 1
Finally, the derivatives \(\frac{\partial \mathbf{E}_i}{\partial ({\Delta {\alpha }}_i,\Delta \delta _i)}\), \(i=1,2\), can be found in Gronchi et al. (2015b, Sect. 7.2).
7.2 The derivatives of \((R_L\mathbf{L}_1-\mathbf{L}_2)\cdot {\varvec{v}_2}\), \(\mathcal {L}\)
The derivative of \(R_L\) with respect to a component x of the vectors \(\mathbf{X}\), \(\varvec{\Delta }\) is obtained from Eq. (44) as
where we have used that \(R_1\) is an orthogonal matrix. A similar expression can be written for \({\tilde{R}}\) starting from (49). The rotation matrices in (39), (50), (51) are represented by means of Euler–Rodrigues formula (see Gallego and Yezzi 2015)
where \(I_3\) is the identity matrix and \(S({\hat{\mathbf{v}}})\) is the skew-symmetric matrix associated with the unit vector \({\hat{\mathbf{v}}} = (v_1,v_2,v_3)^\mathrm{T}\). Then, we have
where
and
The derivatives of \({\hat{\mathbf{v}}}\) are obtained from (41), (52) and using \(\frac{\partial \Phi ^{-1}}{\partial x}\), which is given in “Appendix B”. Note that
and \(\frac{\partial (\dot{\Omega }_1,\dot{\omega }_1)}{\partial x}\) are reported in “Appendix C”.
Regarding Laplace–Lenz conservation law, the derivatives of \(\mathbf{L}_1\cdot {\varvec{v}_2}\), \(\mathbf{L}_2\cdot {\varvec{v}_2}\) are provided in Gronchi et al. (2015b, Sections 7.1, 7.3).
For Lambert’s equation, we have
The derivatives of \({\tilde{n}}_1\) are computed from (23) as shown in “Appendix C”. Moreover,Footnote 2
where the positive sign holds for \(0<\beta ,\gamma <\pi \). The quantities \(\Gamma _\pm =(\Gamma _+\), \(\Gamma _-)\) are defined as in Gronchi et al. (2015b, Sect. 7.1), where d is replaced by \(d_L\), so that
where
and
7.3 The derivatives of \(\mathcal {K}_1\), \(\mathcal {K}_2\)
The value of \(\ddot{\rho }\) is required in the equation of motion (94) at the two epochs \({\tilde{t}}_1\), \({\tilde{t}}_2\). The quantity \(\ddot{\rho }\) is regarded as a constant whose value is updated by means of Eq. (94) at each iteration of Newton–Raphson method for computing \(\varvec{\Delta }\). Note that in this way the values taken by \(\mathcal {K}_1\), \(\mathcal {K}_2\) are always identically 0.
Since \(\mathcal {K}\) depends on quantities that are referred to the same epoch, we will drop the subscript i.
We need to compute:
From the equation
we obtain
with
In (96), we made a little abuse of notation: \(\mathbf{e}^\rho \) stands for both a function of \((\alpha ,\delta )\) and \(({\Delta {\alpha }},\Delta \delta )\).
Then, we introduce \(\mathbf{y}^*\), i.e., the vector \(\tilde{\mathbf{y}}\) (see 27) as a function of the coordinates \({\mathscr {E}}_\mathrm{att}^*\):
Denoting by \({x}_{(k)}\) the k-th component of x (where x can be here either a vector or a map), we can write
Their derivatives are given by
where
with
and
The expressions of
are reported in “Appendices A, B, C”.
8 Numerical tests
We show some numerical tests with two simulated objects whose orbital elements at some epoch are defined in Table 1. For the selected orbits, the perturbation due to the \(J_2\) is dominant if we assume a small area-to-mass ratio of the two objects (see Montenbruck and Gill 2000, Figure 3.1). Moreover, the \(J_2\) effect will be stronger for object 2 because of the smaller values of the inclination and semi-major axis.
A two-body propagation with the \(J_2\) effect (Eq. 23) is used to generate pairs of radar tracks at epochs \({\tilde{t}}_1\), \({\tilde{t}}_2\) of four observations each taken at time intervals of \(10\,{\hbox {s}}\); see (1). Then, we add to \(\rho \), \(\alpha \), \(\delta \) a Gaussian error with zero mean and the standard deviation (rms) shown in Table 2. In Cases 1, 3, a small error is added to \(\rho \),Footnote 3 while in Cases 2, 4 a significant noise affects both the angles and the range. For each object, we consider two pairs of radar tracks, separated by a different number of revolutions k. The interpolated data that we get after adding the noise to the simulated observations are given in Tables 3, 4 for object 1 and Tables 5, 6 for object 2. Note that also the values of \(\dot{\alpha }\), \(\dot{\delta }\) are shown because they are needed to initialize the unknown variables \(\xi \), \(\zeta \).
Tables 7 and 8 report the absolute errors in each orbital element of objects 1, 2 at epoch \({\tilde{t}}_1\). For both objects, the new method, here referred to as IA-\(J_2\), is able to correct the errors in \(\alpha \), \(\delta \) and to recover the Keplerian elements of the known orbits with a satisfactory level of accuracy. Note that the performance of the new method is only slightly affected by the increase of the noise level in \(\rho \) (Cases 2, 4).
We have also compared IA-\(J_2\) to the method IAQ proposed in Gronchi et al. (2015b) which does not take into account the effect of the \(J_2\) term of the geopotential. The advantage of IA-\(J_2\) over IAQ becomes evident when the time interval between two radar tracks increases. Table 8 shows that by taking two radar tracks of object 1 separated by 13 revolutions, the method IAQ does not find a good orbit, while IA-\(J_2\) is able to determine very accurate values of the orbital elements. Also, IAQ does not work with two radar tracks of object 2 separated by 8 revolutions, while IA-\(J_2\) keeps the errors small. Finally, the corrections to the angles \(\alpha \), \(\delta \) computed by the method IA-\(J_2\) are shown in Tables 9 and 10.
9 Conclusions
We propose a new method to compute preliminary orbits of Earth satellites taking into account the Earth oblateness. The method attempts to link together two radar tracks, which may be separated by several revolutions. It consists in solving system (53) by a double-iterative scheme to determine the corrections of \(\alpha \), \(\delta \) and the angular velocity. Numerical tests show that this IOD method works also in the presence of a significant noise level on the range and the angles. Future work will be to include the effect of the atmospheric drag and perform large-scale tests on LEO objects with real observations.
Notes
There is a typo in the equation for \(\frac{\partial \mathcal {E}_1}{\partial \mathbf{X}}\) reported in Gronchi et al. (2015b, Sect. 7.1)
There is a typo in the corresponding formulae in Gronchi et al. (2015b, Sections 7.1, 7.3).
Note that even if the rms of \(\rho \) was 0, the interpolated values of \(\rho \), \(\dot{\rho }\) at time \({\tilde{t}}_1\) would not be exact in general.
References
Broucke, R.A.: On the Matrizant of the Two-Body Problem. Astron. Astrophys. 6, 173–182 (1970)
Celletti, A., Galeş, C.: Dynamics of Resonances and Equilibria of Low Earth Objects. SIAM J. Appl. Dyn. Syst. 17(1), 203–235 (2018)
Celletti, A., Negrini, P.: Non-integrability of the problem of motion around an oblate planet. Celest. Mech. Dyn. Astron. 61(3), 253–260 (1981)
Daquin, J., Rosengren, A.J., Alessi, E.M., Deleflie, F., Valsecchi, G.B., Rossi, A.: The dynamical structure of the MEO region: long-term stability, chaos, and transport. Celest. Mech. Dyn. Astron. 124(4), 335–366 (2016)
Farnocchia, D., Tommei, G., Milani, A., Rossi, A.: Innovative methods of correlation and orbit determination for space debris. Celest. Mech. Dyn. Astron. 107(1–2), 169–185 (2010)
Gallego, G., Yezzi, A.: A Compact Formula for the Derivative of a 3-D Rotation in Exponential Coordinates. J. Math. Imaging Vis. 51(3), 378–384 (2015)
Gronchi, G.F., Baù, G., Marò, S.: Orbit determination with the two-body integrals. III. Celest. Mech. Dyn. Astron. 123(2), 105–122 (2015a)
Gronchi, G.F., Dimare, L., Bracali Cioci, D., Ma, H.: On the computation of preliminary orbits for Earth satellites with radar observations. Mon. Not. R. Astron. Soc. 451(2), 1883–1891 (2015b)
Milani, A., Gronchi, G.F.: Theory of Orbit Determination. Cambridge University Press, New York (2010)
Montenbruck, O., Gill, E.: Satellite Orbits—Models, Methods and Applications, 1st edn. Springer, The Netherlands (2000)
Rosengren, A.J., Scheeres, D.J.: Long-term dynamics of high area-to-mass ratio objects in high-Earth orbit. Adv. Space Res. 52(8), 1545–1560 (2013)
Roy, A.E.: Orbital Motion, 4th edn. CRC Press, Boca Raton (2004)
Siminski, J.A., Montenbruck, O., Fiedler, H., Schildknecht, T.: Short-arc tracklet association for geostationary objects. Adv. Space Res. 53(8), 1184–1194 (2014)
Taff, L.G., Hall, D.L.: The use of angles and angular rates. I: Initial Orbit Determination. Celest. Mech. Dyn. Astron. 16(4), 481–488 (1977)
Vananti, A., Schildknecht, T., Siminski, J.A., Jilete, B., Flohrer, T.: Tracklet–tracklet correlation method for radar and angle observations. In: Flohrer, T., Schmitz, F. (eds.) Proceedings of the 7th European Conference on Space Debris, Darmstadt, Germany, 18–21 April 2017, ESA Space Debris Office (2017)
Acknowledgements
This work is partially supported by the Marie Curie Initial Training Network Stardust, FP7-PEOPLE-2012-ITN, Grant Agreement 317185.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Appendices
Appendix A
The Jacobian matrix of the Cartesian coordinates \({\mathscr {E}}_\mathrm{car}\) with respect to the Keplerian elements \({\mathscr {E}}_\mathrm{kep}\) (see Eqs. 14, 15) can be obtained from Table 2 in Broucke (1970) by setting \(t=0\) in the expressions of \(\frac{\partial \phi _1}{\partial a}\) and noting that \(\frac{\partial \phi _1}{\partial \ell }\) = \(\frac{\partial \phi _1}{\partial M_0}\), where \(M_0\) denotes the mean anomaly at epoch in Broucke (1970).
Let us adopt here and in “Appendix B” the same notation explained in Section 7.3 to refer to the component of a vector and a map. The derivatives \(\frac{\partial ^2\phi _{1(i)}}{\partial {\mathscr {E}}_\mathrm{kep}^2}\), \(i=4,5,6\), are given by:
where \(k=i-3\), and the quantities \(\dot{X}\), \(\dot{Y}\), \(\dot{L}\), \(\dot{M}\), \(\mathbf{P}\), \(\mathbf{Q}\), \(\mathbf{R}\) are defined in Broucke (1970). We have
and
Finally, the derivatives of \(\dot{X}\), \(\dot{Y}\), r that appear in the previous expressions can be found in Broucke (1970, Table 1).
Appendix B
Let us introduce the coordinate change from \({\mathscr {E}}_\mathrm{att}^*\) to \({\mathscr {E}}_\mathrm{car}\) as the composite transformation
Then, we have
where (\(k=1,2,3\))
with
Appendix C
We can write
where
Rights and permissions
About this article

Cite this article
Ma, H., Baù, G., Bracali Cioci, D. et al. Preliminary orbits with line-of-sight correction for LEO satellites observed with radar. Celest Mech Dyn Astr 130, 70 (2018). https://doi.org/10.1007/s10569-018-9867-z
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10569-018-9867-z