
Abstract
This paper is devoted to explore the convolution quadrature based on a class of two-point Hermite collocation methods. Incorporating derivatives into the numerical scheme enhances the accuracy while preserving stability, which is confirmed by the convergence analysis for the discretization of the initial value problem. Moreover, we employ the resulting quadrature to evaluate a class of highly oscillatory integrals. The frequency-explicit convergence analysis demonstrates that the proposed convolution quadrature surpasses existing convolution quadratures, achieving the highest convergence rate with respect to the oscillation among them. Numerical experiments involving convolution integrals with smooth, weakly singular, and highly oscillatory Bessel kernels illustrate the reliability and efficiency of the proposed convolution quadrature.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
We are concerned with the calculation of the convolution integral (CI)
where T is a positive real number, g(t) is a given function, and f(t) represents the convolution kernel. CI (1.1) frequently arises in the time-domain boundary integral equation, fractional differential equation and Volterra integral equation. Its numerical evaluation has attracted a number of attentions during the past several decades. When the kernel function is given, conventional quadrature rules, such as Gauss and Clenshaw-Curtis quadratures, can be employed (see [23] and references therein). In order to make use of the convolution structure, orthogonal polynomial convolution matrices were developed using the convolution of Chebyshev polynomials in [27]. This led to a class of spectral approximations to convolution integrals. However, if the Laplace transform of the kernel function is known analytically, then the convolution quadrature (CQ) becomes a prevalent approach, as evidenced by Lubich’s pioneer work in [14, 15] and the recent successful applications of CQ in the computational practice (see [2, 3, 12, 21] and references therein).
Let \(F(\lambda )\) denote the Laplace transform of f(t). Then \(F(\lambda )\) and f(t) satisfy
We further suppose that \(F(\lambda )\) is analytic in the half-plane \(\textrm{Re}(\lambda )\ge \sigma \) and is bounded by \(M|\lambda |^{-\mu }\) for all \(\lambda \in \varGamma ,\) where M is a constant and \(\mu >0,\) and \(\varGamma :=\sigma +\textrm{i}{\mathbb {R}}.\) Substituting Eq. (1.2) into CI (1.1) results in
It is easy to get that \(y(t)=\int _0^t\textrm{e}^{\lambda \tau }g(t-\tau )d\tau \) satisfies the following initial value problem (IVP) for the ordinary differential equation (ODE)
In [14], the linear multistep formula was employed to solve IVP (1.4). With the help of the fast Fourier transform, quadrature weights were efficiently computed, which led to the well-known linear multistep convolution quadrature (LMCQ). Incorporating correction terms allows LMCQ to compute CI (1.1) with a convergence rate matching that of the underlying linear multistep formula. As the stability of the ODE solver for IVP (1.4) significantly affects the convergence of the corresponding CQ, the prevalent LMCQ is founded on low-order backward difference formulae (BDFCQ). In order to obtain a stable and high-order CQ, Runge–Kutta method was employed in the discretization of IVP (1.4), which led to the Runge–Kutta convolution quadrature (RKCQ) (see [17]). Theoretical and numerical evidences indicated RKCQs with Radau IIA points outperformed LMCQ due to their A-stable properties [22]. Building upon LMCQ and RKCQ, extensive research on CQ has been conducted, encompassing techniques such as variable time stepping, locally supported basis functions, and correction techniques for nonsmooth initial data (see [6, 8, 13]).
CQ also demonstrates the ability to efficiently solve highly oscillatory problems, a property first identified by Lubich in [16], where a system of highly oscillatory Volterra integral equations arising in the time-dependent Schrödinger equation was solved by LMCQ. In addition, in [18], BDFCQ for CI (1.1) with a highly oscillatory Bessel function \(f(t)=J_m(\omega t)\) was studied. It was observed that BDFCQ exhibited the remarkable property that the larger the oscillation parameter \(\omega ,\) the better the approximation. The theoretical analysis indicated errors computed by BDFCQ decayed in terms of the inverse power of \(\omega .\) However, it should be noted that BDFCQ’s asymptotic convergence order with respect to \(\omega \) was limited to \({\mathscr {O}}(\omega ^{-\frac{3}{2}})\) (see [18, Figures 1-3]). In fact, in Sect. 4, we find that RKCQ also converges as quickly as \(\omega ^{-\frac{3}{2}}\) when \(f(t)=J_m(\omega t).\)
The current paper aims to study an extension of CQs for CI (1.1). The proposed approach is developed by incorporating the two-point Hermite interpolation into the design of the ODE solver, which is motivated by the research on Filon-type quadrature for highly oscillatory integrals (see [7, 25]). We find the application of derivatives of g(t) significantly enhances the convergence order of the resulting CQ with respect to both the stepsize and oscillation. When faced with the computation of highly oscillatory integrals, the proposed CQ can surpass the convergence order of \({\mathscr {O}}(\omega ^{-\frac{3}{2}}),\) a limitation observed in existing CQs. The remaining part is organized as follows. Section 2 introduces the construction of the modified CQ, while Sect. 3 presents its convergence analysis with respect to the stepsize. The proposed CQ’s application to calculation of a class of highly oscillatory integrals is evaluated in Sect. 4, along with its convergence analysis with respect to the oscillation parameter. Some remarks are concluded in Sect. 5.
2 Formulation
In this section we construct CQ that uses the two-point k-order Hermite collocation method (TPHC-k) for solving IVP (1.4). Let us commence with the development of this class of ODE solvers. In fact, differentiating both sides of IVP (1.4) k times yields
where \(t\in [0,T].\) It is obvious that \(y^{(l)}(0)\) with \(1\le l\le k+1\) is determined by \(y^{(l)}(0)=\sum _{j=0}^{l-1}\lambda ^{j}g^{(l-1-j)}(0).\) We then evenly divide the interval [0, T] into N subintervals, resulting in an equispaced grid \({\mathscr {X}}_N:=\{t_n:=nh,n=0,1,\ldots ,N\}\) with the stepsize \(h = T/N.\) Next, we define the piecewise polynomial space by
where \(C^{k}([0,T])\) comprises functions with \(k-\)order continuous derivatives over the interval [0, T], and \(v|_{[t_n,t_{n+1}]}\in \pi _{2k+1}\) indicates v is a polynomial with its degree not exceeding \(2k+1\) over the subinterval \([t_n,t_{n+1}].\) Let \(H_{2k+1}(t)\) belong to \(S_k({\mathscr {X}}_N)\) and satisfy IVP (2.1) at nodes \(t_1,t_2,\ldots ,t_N.\) Straightforward computation yields
where \(n=0,1,\ldots ,N-1.\) Let us now proceed to define the Hermite fundamental polynomials \(a_i(\tau )\) and \(b_j(\tau )\) with \(i,j=0,1,\ldots ,k\) over [0, 1] as follows:
-
\(a_i(\tau )\) and \(b_j(\tau )\) are polynomials of degree \(2k+1;\)
-
\(a_i^{(l)}(0)=\delta _{i,l},a_i^{(l)}(1)=0,~i, l=0,1,\ldots ,k;\)
-
\(b_j^{(m)}(0)=0,b_j^{(m)}(1)=\delta _{j,m},~j, m=0,1,\ldots ,k.\)
Here \(\delta _{i,j}\) denotes the Kronecker delta function. Employing the local Hermite fundamental polynomials, we rewrite \(H_{2k+1}(t)\) over the subinterval \([t_n,t_{n+1}]\) by
where \(y_n^j=H_{2k+1}^{(j)}(t_n)\) for \(j=0,1,\ldots ,k.\) Inserting Eq. (2.3) into Eq. (2.2) gives the following collocation equation
where \(\alpha _j = a_j^{(k+1)}(1),~\beta _j = b_j^{(k+1)}(1)\) and \(g_{n+1}^{j}=g^{(j)}(t_{n+1})\) for \(j=0,1,\ldots ,k.\) Define
Then the TPHC-k solution for IVP (2.1) can be obtained through the following iterative procedure:
once the matrix \({\textbf{A}}-\lambda {\textbf{E}}_{k+1}\) is invertible. Actually, the determinant of \({\textbf{A}}-\lambda {\textbf{E}}_{k+1}\) is calculated by
Define the first associated polynomial for TPHC-k by \(\varDelta _{1,k}(z)=\sum _{j=0}^k\beta _jz^j-z^{k+1}.\) For real parts of \(h\lambda \) sufficiently close to zero, the following condition guarantees the invertibility of \({\textbf{A}}-\lambda {\textbf{E}}_{k+1}.\)
Condition 1
The real parts of the roots of TPHC-k’s first associated polynomials are all positive.
Through direct computation, we present the first associated polynomials for TPHC-ks with \(k=1,2,3,4\) in Table 1. Furthermore, roots of these first associated polynomials, computed directly in Matlab, are presented in Table 2, which indicates that TPHC-ks with \(k=1,2,3,4\) satisfy Condition 1.
Conversely, let’s establish the recurrence of \(y_n^0\) and \(y_{n+1}^0\) by examining the last equation in Eq. (2.4). Noting that \( y_n^j=\lambda ^{j}y_n^0+\sum _{i=0}^{j-1}\lambda ^i g_n^{j-1-i}, \) we have
or equivalently,
Denote the second associated polynomial for TPHC-k by \(\varDelta _{2,k}(z)=\sum _{j=0}^k\alpha _jz^j.\) In Table 3, we list the second associated polynomials for TPHC-ks with \(k=1,2,3,4.\)
TPHC-k is said to be stable at \(h\lambda \) if the inequality \(\left| \frac{\varDelta _{2,k}(h\lambda )}{\varDelta _{1,k}(h\lambda )}\right| <1\) is satisfied. In order to enable the resulting CQ to solve hyperbolic-type problems, the following condition must be satisfied to ensure the A-stability of TPHC-k.
Condition 2
For \(\textrm{Re}(z)\le 0,\) the absolute value of the ratio \(\frac{\varDelta _{2,k}(z)}{\varDelta _{1,k}(z)}\) is strictly less than 1, except when \(\left| \frac{\varDelta _{2,k}(z)}{\varDelta _{1,k}(z)}\right| =1\) for \(z=1.\)
In Fig. 1, we plot the stability domains of TPHC-ks with \(k=1,2,3,4.\) We compute \(\frac{\varDelta _{2,k}(z)}{\varDelta _{1,k}(z)}\) with \(\textrm{Re}(z)\in [-4,0]\) and \(\textrm{Im}(z)\in [-3,3].\) If \(\left| \frac{\varDelta _{2,k}(z)}{\varDelta _{1,k}(z)}\right| < 1,\) a black dot is placed at z. It can be shown that this inequality is satisfied for all values of z except for \(z = 0.\) Actually, a direct calculation results in \(\left| \frac{\varDelta _{2,k}(0)}{\varDelta _{1,k}(0)}\right| =1\) for \(k=1,2,3,4.\) On the other hand, it can be easily seen that \(\frac{\varDelta _{2,k}(z)}{\varDelta _{1,k}(z)}\) decays as \(|z|\rightarrow \infty .\) We can therefore conclude TPHC-ks with \(k=1,2,3,4\) are A-stable.

Stability domains of TPHC-k
Prior to constructing the convolution quadrature, we introduce the following function class:
Definition 2.1
Suppose the function g is \(m-\)times differentiable over [0, T]. Then it is in the class \({\mathscr {A}}(m)\) if it satisfies \(g(0)=g'(0)=\cdots =g^{(m)}(0)=0.\) Particularly, g is in \({\mathscr {A}}(-1)\) if \(g(0)\ne 0.\)
Assuming \(g\in {\mathscr {A}}(2k+1),\) we multiply both sides of Eq. (2.5) by \(\zeta ^n\) for \(n\ge 0,\) following the methodology in [14], and obtain by summation
where
Letting \(\delta (\zeta )=({\textbf{A}}+{\textbf{B}}\zeta ),\) we can compute
Then we investigate the invertibility of \(\delta (\zeta ) - \lambda {\textbf{E}}_{k+1}\) in the case of \(|\zeta |< 1\) and \(\textrm{Re}(h\lambda )\le 0.\) To proceed, in addition to satisfying Conditions 1 and 2, we will assume the following condition holds.
Condition 3
The real parts of the eigenvalues of the matrix \(h{\textbf{A}}\) arising from TPHC-k are all positive.
This condition can also be verified by a series of calculations. The eigenvalues of \(h{\textbf{A}}\) with an arbitrary h for the first TPHC-ks are presented in Table 4, where we can see TPHC-ks with \(k=1,2,3,4\) satisfy Condition 3. It is also noteworthy that the real parts of the eigenvalues of the matrix \({\textbf{A}}\) are all positive and grow as quickly as \(h^{-1}\) when h approaches zero.
Direct calculation results in
Let \(\varLambda \) denote the last row of \({\textbf{B}}\) and \({\textbf{e}}_{k+1}\) denote the \((k+1)\times 1\) vector \((0~,~\ldots ~,~0~,~1)^T.\) Then we have \({\textbf{B}}={\textbf{e}}_{k+1}\varLambda .\) As a result, it follows that
Direct computation leads to \(\varLambda ({\textbf{A}}-\lambda {\textbf{E}}_{k+1})^{-1} {\textbf{e}}_{k+1}=\frac{\varDelta _{2,k}(h\lambda )}{\varDelta _{1,k}(h\lambda )}.\) Therefore, under Condition 2, for sufficiently large j and small h, we obtain \(\Vert (({\textbf{A}}-\lambda {\textbf{E}}_{k+1})^{-1}{\textbf{B}})^{j}\Vert <1\) for \(\textrm{Re}(\lambda )\le 0\) and \(\lambda \ne 0.\) On the other hand, since the non-zero eigenvalue of \({\textbf{A}}^{-1}{\textbf{B}}\) is \(-1,\) we conclude that \(\delta (\zeta )\) is invertible when \(|\zeta |< 1.\) Subsequently, \(\delta (\zeta ) - \lambda {\textbf{E}}_{k+1}\) is invertible for any \(\lambda \) with a non-positive real part, given that \(|\zeta |< 1.\) This implies that all the real parts of the eigenvalues of \(\delta (\zeta )\) are positive when \(|\zeta |< 1.\) With the help of Cauchy’s integral formula [9], we have
Suppose that \(F(\delta (\zeta )) = \sum _{j=0}^{\infty }{\textbf{W}}_j(h)\zeta ^j,\) where the expansion coefficients \({\textbf{W}}_j(h)\) can be computed by
for some positive number \(\rho \) satisfying \(\rho <1.\) By exploiting the \(2\pi \)-periodicity of the integrand and utilizing the composite trapezoidal rule, we obtain the following:
In this paper, we utilize a tolerance \(\epsilon =10^{-16},\) \(\rho = \epsilon ^{\frac{1}{L}},\) \(L=10N,\) and the summations are implemented using the fast Fourier transform (see [15]). Evaluating these quadrature weights incurs a computational cost comparable to that of classical RKCQs and BDFCQs. In summary, the k-order Hermite convolution quadrature (HCQ-k) \(I[f,g]_{h,k}^{n+1}\) for CQ (1.1) is defined by
with the \(1\times (k+1)\) vector \({\textbf{e}}_1 = \left( \begin{array}{cccc} 1 ,&{} 0 ,&{} \cdots ,&{} 0 \\ \end{array} \right) .\)
3 Convergence Analysis
In this section, we present the error analysis as \(h\rightarrow 0\) for HCQ-k by assuming that \(g\in {\mathscr {A}}(2k+1)\) in CI (1.1) and quadrature weights are accurate.
Let us rewrite IVP (2.1) with the help of two-point k-order Hermite interpolation of y(t). For \(t\in [t_n,t_{n+1}],\) we compute
where the remainder equals
\({\hat{\xi }}_n(\tau )\in [t_n,t_{n+1}],\tau \in [0,1].\) Inserting Eq. (3.1) into IVP (2.1) results in
with \(\xi _n={\hat{\xi }}_n(1),\)
Let \(\epsilon _n^j:=y^{(j)}(t_n)-y_n^j.\) It follows from Eqs. (2.5) and (3.2) that
Direct computation yields
or equivalently,
The above equation holds under Condition 1 and for sufficiently small values of h. Letting
we have by a series of calculations
In the remaining part, we let C denote various constants which are independent of \(\lambda ,\) h, and \(\omega \) for simplicity. It is noted that Condition 1 implies \(1/\varDelta _{1,k}(z)\) is bounded in the case of \(\textrm{Re}(z)\le 0\) and approaches zero as \(|z|\rightarrow \infty .\) Furthermore, Condition 2 ensures that Q(z) remains bounded in the neighborhood of \(z=0\) and becomes strictly less than 1 as z moves away from 0 in the left complex plane. As a result, for sufficiently small r and \(|z|\le r,\) we have \(\sum _{l=0}^{n}|Q^{n-l}(z)|\le C(n+1).\) On the other hand, for \(|z|\ge r\) and sufficiently small real part of z, we have \(\sum _{l=0}^{n}|Q^{n-l}(z)|\) converges. We are now in a position to derive the convergence property of HCQ-k.
Theorem 3.1
Suppose that Conditions 1–3 are satisfied and \(g\in {\mathscr {A}}(2k+1)\cap C^{2k+3}([0,T]).\) Then for any \(t_{n+1}\in {\mathscr {X}}_N,\) the quadrature error of HCQ-k satisfies:
Proof
With the representation for the collocation error of TPHC-k established, our remaining work is to evaluate the integration of \(F(\lambda )\epsilon _{n+1}^0\) over \(\varGamma .\) To begin with, we show that
As a result, for any \(\lambda \in \varGamma ,\) \(y^{(2k+2)}(t)\) is bounded on [0, T] if \(|\lambda |\le 1,\) while \(|y^{(2k+2)}(t)|\) decays as quickly as \(|\lambda |^{-1}\) in the case of \(|\lambda |\ge 1\) and \(|\lambda |\rightarrow \infty .\)
Straightforward computation reveals that
where \(M_{max}:=\{|M_0|,|M_1|,\ldots ,|M_{n}|\}.\) We proceed by dividing the integration path into the following two parts:
and conduct the analysis separately. For \(\lambda \in \varGamma _1,\) we find \(F(\lambda ),M_{max},\frac{1}{|\varDelta _{1,k}(h\lambda )|}\) and \(h\sum _{l=0}^{n}|Q(h\lambda )|^{l}\) are bounded by a constant independent of \(\lambda \) and h. As a result, it follows
For \(\lambda \in \varGamma _2,\) we obtain both \(\frac{1}{|\varDelta _{1,k}(h\lambda )|}\) and \(\sum _{l=0}^{n}|Q(h\lambda )|^{l}\) are bounded by a constant independent of \(\lambda \) and h. In addition, \(|F(\lambda )M_{max}|\) decays as quickly as \(|\lambda |^{-\mu -1}.\) Hence, we get
To conclude, we have \( |(f*g)(t_{n+1})-I[f,g]_{h,k}^{n+1}|\le Ch^{2k+1}. \) This completes the proof. \(\square \)
If the condition \(g\in {\mathscr {A}}(2k+1)\) does not hold, the proposed convolution quadrature cannot attain the theoretical convergence rate given in the above theorem. In order to enhance the convergence of HCQ-k, we begin by solving the linear system
and obtain the modified weights \({\hat{w}}_{n,j}.\) Then we denote the k-order modified Hermite convolution quadrature (MHCQ-k) \(\widehat{I[f,g]}_{h,k}^{n+1}\) as
Then for any sufficiently smooth g(t), we can express it as
It is obvious that MHCQ-k is exact for \(\sum _{l=0}^{2k+1}\frac{g^{(l)}(0)}{l!}t^l.\) On the other hand, since \(g(t)-\sum _{l=0}^{2k+1}\frac{g^{(l)}(0)}{l!}t^l \in {\mathscr {A}}(2k+1),\) we conclude that the convergence rate of MHCQ-k coincides with that in Theorem 3.1.
To validate the theoretical estimates presented above, we conduct a series of numerical experiments involving CIs with smooth and weakly singular kernels. In the following numerical experiments, the absolute error (AE) is calculated as the maximum of the difference between the approximation and the one computed by Matlab’s built-in function “quadgk” with sufficiently small subintervals.
Firstly, we consider the smooth kernel with g(t) falling in \({\mathscr {A}}(-1),\)
Table 5 presents AEs computed by MHCQs and their corresponding convergence orders. The convergence rates observed in Table 5 for MHCQ-ks with \(k=1,2,3\) are 3, 5, 7, respectively, which is consistent with the theoretical estimates established in Theorem 3.1.
A surge of research in fractional calculus has emerged over the past few decades, with CQ establishing itself as a prominent approach for efficiently computing fractional derivatives and integrals (see [1]). Let us consider the numerical approximation to the following Riemann–Liouville fractional integrals by MHCQs,
Again, we find \(\cos (\tau ^2+1) \in {\mathscr {A}}(-1).\) We apply MHCQ-ks with \(k=1,2,3\) to numerical calculation of CI (3.8), and computed results are given in Table 6. It can be seen that MCHQs demonstrate their capability to approximate the Riemann–Liouville fractional integral with the convergence order of \(2k+1\), and the fractional order of \(-1/3\) does not affect the computational accuracy.
4 Application to a Highly Oscillatory Problem
This section focuses on the application of MHCQ-k to solving highly oscillatory problems arising in the single layer potential equation for acoustic scattering from the half-plane. In fact, through the polar coordinate transformation and spatial Fourier transform, this class of potential equations can be transformed into a Volterra integral equation
During the past two decades, numerical solutions to Eq. (4.1) have been studied by a number of authors (see [4, 5, 11, 26]). When dealing with large values of \(\omega ,\) it becomes unavoidable to compute the following highly oscillatory integrals of convolution-type that arise in the discretization method
Studies on the calculation of highly oscillatory integrals attract a number of attentions during the past two decades. Theoretical and numerical evidences have verified that efficient approaches, such as Filon-type [7, 25] and Levin-type quadratures [10, 20, 24], are able to compute high-order approximations to highly oscillatory integrals as the oscillation parameter \(\omega \) enlarges. We find MHCQs exhibit properties similar to those of existing Filon-type and Levin-type quadratures. MHCQs are particularly advantageous in situations where the Laplace transform of the oscillatory kernel can be easily obtained or computed efficiently.
Oberseving that the Laplace transform of \(J_{m}(\omega t)\) is given by
we discover that it exhibits non-analyticity at \(\pm \omega \textrm{i}.\) Meanwhile, it is found that \(F(\lambda )\) slightly increase as \(\lambda \) varies along \(\varGamma \) from \(\lambda =\sigma -\omega \textrm{i}\) to \(\lambda =\sigma +\omega \textrm{i}.\) For \(|\kappa |\ge \omega ,\) the magnitude \(|F(\lambda )|\) with \(\lambda =\sigma \pm \kappa \textrm{i}\) decays as quickly as \(|\lambda |^{-m-1}.\) This suggests that we should partition the integration curve along the oscillation parameter \(\omega \) in the analysis of MHCQs.
Let us shift our focus to the reformulation of MHCQ-k. Suppose that \({\hat{g}}(t)\in S_k({\mathscr {X}}_N)\) and satisfies the interpolation condition \({\hat{g}}^{(l)}(t_n)=g^{(l)}(t_n)\) with \(l=0,\ldots ,k\) and \(n=0,\ldots ,N.\) Given that \(H_{2k+1}'(t)-\lambda H_{2k+1}(t)-{\hat{g}}(t) \in S_k({\mathscr {X}}_N)\) also satisfies the aforementioned interpolation conditions, we deduce that \(H_{2k+1}'(t)-\lambda H_{2k+1}(t)={\hat{g}}(t).\) This implies \(H_{2k+1}(t)=\int _0^t\textrm{e}^{\lambda (t-s)}{\hat{g}}(s)ds\) and
Letting \(\varPhi _0(\tau )=g(t_{n+1}-\tau )-{\hat{g}}(t_{n+1}-\tau ),\) with the help of the property of the Bessel function [19, p. 222]
we repeatedly utilize integration by parts and get
where \( \varPhi _{r+1}(\tau )=\varPhi _{r}'(\tau )-\frac{(m+r+1)\left( \varPhi _{r}(\tau )-\varPhi _{r}(0)\right) }{\tau }. \) Noting that
we have \(\varPhi _{r}(t_j)=0,\) which implies
Then we are in the position to get the following frequency-explicit estimation for MHCQs applied to the calculation of CI (4.2).
Theorem 4.1
Suppose that Conditions 1–3 are satisfied and \(g\in {\mathscr {A}}(2k+1)\cap C^{2k+3}([0,T]).\) Then for any \(t_{n+1}\in {\mathscr {X}}_N\) and sufficiently large \(h\omega ,\) it follows
Proof
We begin by considering the asymptotic property of the integral
Inserting the Laplace transform of \(J_{m+k+1}(\omega \tau )\) into the above integral leads to
As a result, we have using integration by parts
As is done in the proof of Theorem 3.1, it follows that
Divide the integration path into the following three parts:
Then for \(\lambda \in {\hat{\varGamma }}_1,\) since \(|M_{max}|\) and \(h\sum _{l=0}^{n}|Q^{n-l}(h\lambda )|\) are bounded by a constant independent of \(\lambda ,h,\omega ,\) we have
where the variable transformation \(\lambda = \omega \theta \) is employed. For \(\lambda \in {\hat{\varGamma }}_2,\) since \(M_{max}\le C|\lambda |^{-1},\) and \(\sum _{l=0}^{n}|Q^{n-l}(h\lambda )|\) converges, we obtain
where we utilize the fact that \(\left| \frac{1}{\sqrt{\theta ^2+1} (\sqrt{\theta ^2+1}+\theta )^{m+k+1}}\right| \) is bounded. For \(\lambda \in {\hat{\varGamma }}_3,\) it is noted that \(\frac{|h\lambda |^{k+1}}{|\varDelta _{1,k}(h\lambda )|}\) is bounded for arbitrary h and \(\lambda ,\) \(M_{max}\le C|\lambda |^{-1},\) and \(\sum _{l=0}^{n}|Q^{n-l}(h\lambda )|\) converges, which implies
As a result, we have
Noting the relation between \(\varPhi _0^{(r)}(\tau )\) and \(\varPhi _{r}(\tau ),\) we find \(\int _0^{t_{n+1}}J_{m+k+1}(\omega \tau )\varPhi _{k+1}(\tau )d\tau \) consists of the moments
On the other hand, utilizing the integration by parts indicates
Therefore, repeated application of the above integration by parts yields the following expression for the given integral at \(t=t_{n+1}\)
Following the same approach as in the proof of Eq. (4.5), we derive
This completes the proof. \(\square \)
Equation (4.4) implies as \(\omega \) increases and h is fixed, the quadrature error converges as quickly as \(\omega ^{-k-2}.\) Meanwhile, in the case of \(\omega \gg 1,\) reducing the step size will, correspondingly, lead to a decrease in quadrature errors.
Now let us test MHCQs for highly oscillatory integrals and examine the asymptotic property of the quadrature error as \(\omega \) increases. Consider the calculation of the following highly oscillatory integral,
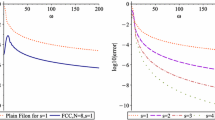
We uniformly divide [0, 1] into 5 subintervals and apply MHCQs, BDFCQ and RKCQ to numerically compute CI (4.6). For BDFCQ, we utilize the second-order backward difference formula to solve IVP (1.4). In contrast, for RKCQ, we employ 3-stage Runge–Kutta method to solve IVP (1.4). AEs computed using MHCQ-1, MHCQ-2, RKCQ and BDFCQ are presented in Table 7, with \(\omega \) being a variable parameter. As this table demonstrates, AEs of all CQs exhibit a common decaying trend as the value of \(\omega \) increases. Among the methods considered, MHCQs provide the most accurate approximations. To examine the asymptotic behavior of AEs, we present AEs multiplied by their corresponding orders in Figs. 2 and 3. The nearly horizontal lines in these figures suggest that the asymptotic orders of MHCQ-1, MHCQ-2, RKCQ and BDFCQ are \({\mathscr {O}}(\omega ^{-3}),\) \({\mathscr {O}}(\omega ^{-4}),\) \({\mathscr {O}}(\omega ^{-3/2}),\) and \({\mathscr {O}}(\omega ^{-3/2}),\) respectively. Therefore, MHCQs demonstrate superior efficiency in solving highly oscillatory problems compared to existing CQs.
Next, we examine the influence of stepsize on AEs in the case of the high oscillation. Let \(\textrm{Err}_N^{\omega }\) represent AEs computed by MHCQ-1 using N nodes. In Fig. 4, we show the ratios \(\textrm{Ratio}_{8}^{16}:=\frac{\textrm{Err}_{16}^{\omega }}{\textrm{Err}_{8}^{\omega }}\) and \(\textrm{Ratio}_{16}^{32}:= \frac{\textrm{Err}_{32}^{\omega }}{\textrm{Err}_{16}^{\omega }}\) for varying values of \(\omega \) between 1000 and 3000. The observed oscillation of the ratios around 1/4 suggests that the convergence order of MHCQ-1 with respect to the stepsize is approximately 2. It’s worth noting that this convergence property is only observed in the case of the high oscillation. If the condition \(h\omega \approx 1\) is met, the convergence order will be irregular.

Asymptotic convergence rates of MHCQ-1 (left) and MHCQ-2 (right) for CI (4.6)

Asymptotic convergence rates of RKCQ (left) and BDFCQ (right) for CI (4.6)

The ratio of AEs computed using MHCQ-1 for CI (4.6)
We conclude this section by presenting a numerical example that demonstrates the application of MHCQs to solve the first-kind Volterra integral equation (4.1) with \(a(t)=t\textrm{e}^{-t}.\) We employ the direct-Filon method (DF) introduced by [26], BDFCQ and MHCQs to solve this integral equation, and list AEs at \(t=1\) in Fig. 5. It is evident that MHCQs exhibit superior performance compared to the other two approaches in solving highly oscillatory integral equations.

Absolute errors of various CQs for Volterra integral equation (4.1) as \(\omega \) increases
5 Final remarks
What we have seen from the above is the proposed CQ using the Hermite collocation method is able to efficiently compute CI (1.1) when correction terms are incorporated into the numerical formula. Moreover, it adopts the same block structure as its Runge-Kutta counterpart, and both methods attain high convergence orders as the step size decreases. However, it is crucial to highlight that MHCQs demonstrate the highest convergence rate among existing CQs for calculating highly oscillatory integrals. Therefore, we can speculate that MHCQs hold immense potential for numerical solutions of highly oscillatory problems.
References
Banjai, L., López-Fernández, M.: Efficient high order algorithms for fractional integrals and fractional differential equations. Numer. Math. 141(2), 289–317 (2019)
Banjai, L., Lubich, C., Nick, J.: Time-dependent acoustic scattering from generalized impedance boundary conditions via boundary elements and convolution quadrature. IMA J. Numer. Anal. 42(1), 1–26 (2022)
Banjai, L., Sayas, F.: Integral Equation Methods for Evolutionary PDE: A Convolution Quadrature Approach. Springer Nature (2022)
Brunner, H., Davies, P.J., Duncan, D.B.: Discontinuous Galerkin approximations for Volterra integral equations of the first kind. IMA J. Numer. Anal. 29(4), 856–881 (2009)
Davies, P.J., Duncan, D.B.: Stability and convergence of collocation schemes for retarded potential integral equations. SIAM J. Numer. Anal. 42(3), 1167–1188 (2004)
Davies, P.J., Duncan, D.B.: Convolution spline approximations for time domain boundary integral equations. J. Integral Equ. Appl. 26(3), 369–410 (2014)
Iserles, A., Nørsett, S.P.: Efficient quadrature of highly oscillatory integrals using derivatives. Proc. R. Soc. A Math. Physi. Eng. Sci. 461(2005), 1383–1399 (2005)
Jin, B., Li, B., Zhou, Z.: Correction of high-order BDF convolution quadrature for fractional evolution equations. SIAM J. Sci. Comput. 39(6), A3129–A3152 (2017)
Lang, S.: Complex Analysis. Springer, Berlin (2003)
Levin, D.: Procedures for computing one- and two-dimensional integrals of functions with rapid irregular oscillations. Math. Comput. 38(158), 531–538 (1982)
Li, B., Xiang, S., Liu, G.: Laplace transforms for evaluation of Volterra integral equation of the first kind with highly oscillatory kernel. Comput. Appl. Math. 38, 1–18 (2019)
Li, B., Ma, S.: Exponential convolution quadrature for nonlinear subdiffusion equations with nonsmooth initial data. SIAM J. Numer. Anal. 60(2), 503–528 (2022)
López-Fernández, M., Sauter, S.: Generalized convolution quadrature based on Runge–Kutta methods. Numer. Math. 133(4), 743–779 (2016)
Lubich, C.: Convolution quadrature and discretized operational calculus. I. Numerische Mathematik 52(2), 129–145 (1988)
Lubich, C.: Convolution quadrature and discretized operational calculus. II. Numerische Mathematik 52(4), 413–425 (1988)
Lubich, C.: On convolution quadrature and Hille-Phillips operational calculus. Appl. Numer. Math. 9(3–5), 187–199 (1992)
Lubich, C., Ostermann, A.: Runge–Kutta methods for parabolic equations and convolution quadrature. Math. Comput. 60(201), 105–131 (1993)
Ma, J., Liu, H.: On the convolution quadrature rule for integral transforms with oscillatory Bessel kernels. Symmetry 10(7), 239 (2018)
Olver, F., Lozier, D., Boisvert, R., Clark, C.: NIST Handbook of Mathematical Functions. Cambridge University Press, Cambridge (2010)
Olver, S.: Moment-free numerical integration of highly oscillatory functions. IMA J. Numer. Anal. 26(2), 213–227 (2006)
Sayas, F.: Retarded Potentials and Time Domain Boundary Integral Equation: A Road Map. Springer, Berlin (2016)
Schädle, A., López-Fernández, M., Lubich, C.: Fast and oblivious convolution quadrature. SIAM J. Sci. Comput. 28(2), 421–438 (2006)
Trefethen, L.N.: Approximation Theorey and Approximation Practice. SIAM, Philadelphia (2013)
Wang, Y., Xiang, S.: Fast and stable augmented Levin methods for highly oscillatory and singular integrals. Math. Comput. 91, 1893–1923 (2022)
Xiang, S., Wang, H.: Fast integration of highly oscillatory integrals with exotic oscillators. Math. Comput. 79(270), 829–844 (2009)
Xiang, S., Brunner, H.: Efficient methods for Volterra integral equations with highly oscillatory Bessel kernels. BIT Numer. Math. 53(1), 241–263 (2013)
Xu, K., Loureiro, F.: Spectral approximation of convoution operators. SIAM J. Sci. Comput. 40(4), A2336–A2355 (2018)
Acknowledgements
We express our sincere gratitude to anonymous reviewers for their insightful comments, which significantly enhanced the quality of our paper. J. Ma’s work was partly supported by National Natural Science Foundation of China (No. 11901133) and Science and Technology Foundation of Guizhou Province (No. QKHJC[2020]1Y014).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Communicated by Stefano De Marchi.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ren, H., Ma, J. & Liu, H. A convolution quadrature using derivatives and its application. Bit Numer Math 64, 8 (2024). https://doi.org/10.1007/s10543-024-01009-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10543-024-01009-w