
Abstract
We give an a priori analysis of a semi-discrete discontinuous Galerkin scheme approximating solutions to a model of multiphase elastodynamics which involves an energy density depending not only on the strain but also the strain gradient. A key component in the analysis is the reduced relative entropy stability framework developed in Giesselmann (SIAM J Math Anal 46(5):3518–3539, 2014). The estimate we derive is optimal in the \(\hbox {L} _{\infty }(0,T;dG)\) norm for the strain and the \(\hbox {L} _{2}(0,T;dG)\) norm for the velocity, where dG is an appropriate mesh dependent \(\hbox {H} ^{1}\)-like space.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Our goal in this work is to introduce the reduced relative entropy technique as a methodology for deriving a priori error estimates to finite element approximations of a problem arising in elastodynamics. In particular, this work is concerned with providing a rigorous a priori error estimate for a semi (spatially) discrete discontinuous Galerkin scheme approximating the solution of a multiphase problem in nonlinear elasticity. We consider a model for shearing motions in an elastic bar undergoing phase transitions between phases corresponding to different (intervals of shear) strains. The model is based on the equations of nonlinear elastodynamics with a non-convex energy density regularized by an additional (quadratic) dependence of the energy density on the strain gradient. Such models are frequently called “second (deformation) gradient” models [20]. It should be noted that (due to the non-convexity of the energy) it is not immediately obvious what an appropriate stability theory is. A possible answer to this question was given in [16] where a modification of the relative entropy approach was presented, which uses the higher order regularizing terms in order to compensate for the non-convexity of the energy.
The relative entropy framework for hyperbolic conservation laws endowed with a convex entropy was introduced in [8, 12]. For systems of conservation laws describing (thermo)-mechanical processes the notion of (mathematical) entropy follows from the physical one [9]. The generalization of the relative entropy techniques to entropies which are quasi or polyconvex is by now standard and is discussed in detail in [9]. It should be noted, however, that the model considered in this study does not fall into this framework which requires us to build our analysis around the stability framework from [16].
Our analysis is based on deriving a space discrete version of the modified relative entropy framework from [16]. This enables us to derive an estimate for the difference of solutions to our semi-discrete scheme and a perturbed version thereof. We combine this stability framework with appropriate projection operators which enable us to show that the exact solution satisfies a perturbed version of the numerical scheme.
In order to be more precise let us introduce the equations under consideration: In one space dimension the equations of nonlinear elasticity read
where u is the strain, v is the velocity and \(W=W(u)\) is the energy density given by a constitutive relation. They can also be cast as a nonlinear wave equation for the deformation field y satisfying \(\partial _x y=u:\)
A priori estimates for continuous finite element and dG schemes approximating the wave equation can be found in [21, 24–26] for dG schemes for stationary elliptic and hyperbolic equations of elasticity. For (1.1) to describe multiphase behaviour the energy density W needs to be non-convex which makes (1.1) a problem of mixed hyperbolic-elliptic type. This leads to many problems concerning e.g. uniqueness of solutions to (1.1). To overcome the difficulties caused by the hyperbolic-elliptic structure either a kinetic relation [1, 22] needs to be introduced, or regularizations of (1.1) need to be considered. We will study the numerical approximation of systems arising from the second approach. In particular, we will study the following regularized problem which was considered in the following non-exhaustive list ([2, 13, 19, 23, 27, 28], e.g.):
where \(\mu \ge 0,\, \gamma >0\) are parameters which scale the strength of viscous and capillary effects. It should be noted that (1.2) is a physically meaningful model in itself, which also can be written in wave equation form
The numerical simulation of (1.3) and similar models, at hand and similar models, like the Navier–Stokes–Korteweg system, has received some attention in recent years (e.g., [4, 5, 11, 17, 20, 29]). Indeed it turned out that even obtaining stability of numerical solutions is not trivial. In this work we are interested in the case that \(\gamma \) is small, here it is expected that solutions of (1.2) display thin layers at phase boundaries. Thus, we advocate the use of discontinuous Galerkin (dG) finite element methods.
The remainder of the paper is organized as follows: after giving some basic definitions we study well-posedness of (1.2) and its associated energy in Sect. 2. In Sect. 3 we define the semi-discrete dG scheme and describe some immediate properties of the involved (discrete) operators. In Sect. 4 we derive a discrete version of the reduced relative entropy framework and derive a stability estimate for solutions of a perturbed version of the numerical scheme. Section 5 is devoted to the construction of projection operators. The aim is to show that the projection of the exact solution of (1.2) is a solution to a perturbed version of our dG scheme. In order to derive the projection operators we need to study the gradient operators used in the dG scheme in more detail. We combine the results of the preceding sections in Sect. 6 in order to derive an error estimate for our dG scheme. Finally in Sect. 7 we conduct some numerical benchmarking experiments.
2 Preliminaries, well-posedness and relative entropy
Given the standard Lebesgue space notation [7, 14] we begin by introducing the Sobolev spaces. Let \(\varOmega \subset \mathbb R \) then
which are equipped with norms and seminorms
respectively, where derivatives \(\mathrm {D}^{\alpha }\) are understood in a weak sense.
We also make use of the following notation for time dependent Sobolev (Bochner) spaces:
We define \(\hbox {H} ^{k}(\varOmega ) := \hbox {W} _{2}^{k}(\varOmega ).\) For any function space the subspace of functions with vanishing mean is denoted by subscript m.
We complement (1.2) with periodic boundary conditions. To make this obvious in the notation we consider (1.2) on \([0,T) \times S^1\) for some \(T>0\) where \(S^1\) denotes the flat circle, \(\text { i.e., }\) the interval [0, 1] with the endpoints being identified with each other. We also need an initial condition \(u(0,\cdot )=u_0\) for some \(u_0 : S^1 \rightarrow \mathbb {R}\) whose regularity we will specify later.
We assume \(W \in \hbox {C} ^{3}(\mathbb R, [0,\infty ))\) but make no assumption on the convexity of W. The standard application we have in mind is that W has a multi-well shape.
The well-posedness of (1.2) can be ensured using semi-group theory:
Proposition 1
(Well-posedness) Let \(k \in \mathbb N,\, k \ge 3\) and initial data \(u_0 \in \hbox {H} ^{k}(S^1), \, v_0 \in \hbox {H} ^{k-1}(S^1)\) with \(\int _{S^1}u_0 \,\mathrm {d}x= \int _{S^1} v_0 \,\mathrm {d}x=0\) and \(\mu ,\gamma >0\) be given. Let \(W \in \hbox {C} ^{k}(\mathbb R).\) Then, there exists some \(T>0\) such that the problem (1.2) has a unique strong solution (u, v) satisfying
with \(\int _{S^1}u(t,\cdot ) \,\mathrm {d}x= \int _{S^1} v(t,\cdot ) \,\mathrm {d}x=0\) for all \(0 \le t \le T.\)
In case \(k=3\) the solution exists for arbitrary times \(T>0\). This, indeed, relies on the compatibility of the model with the second law of thermodynamics, \(\text { i.e., }\) the following energy dissipation equality which is well-known.
Lemma 1
(Energy balance for (1.2)) Let \(T,\,\gamma >0\) and \(\mu \ge 0\) be given and let
be a strong solution of (1.2). Then, the following energy balance law holds in \((0,T) \times S^1:\)
Proof of Proposition 1
The result for \(k=3\) can be found in [16]. We will show the result for \(k=4\), the generalization to \(k \ge 5\) is straightforward. Note that by forming the x-derivative of (1.3) we obtain the following equation for \(u=\partial _{x}{y} \)
where \(\partial _x y\) is considered to be already given (from the result for \(k=3\)). With \(z= { (u, \partial _t u)}^{{\varvec{\intercal }}}\) this can be cast in abstract form as
Let us define the spaces
For every \(w \in X\) it holds that \(\partial _x w \in \hbox {H} ^{1}_m(S^1)\) such that, by Poincaré’s inequality,
define a scalar product and a norm on Y. The operator A is densely defined on Y with
The operator A induces a \(C^0\) semi-group on Y which can be seen analogously to the arguments in [2] using \(\{ \sin {2n \pi \cdot }, \cos {2n \pi \cdot } \, : \, n \in \mathbb N \}\) as a basis of X. Note that for all \(t \ge 0\) it holds that
due to our assumptions on the initial data and the fact that the wave equation (2.8) can be recast as conservation laws for \(\partial _x u, \partial _t u\). The semi-group induced by A is, in fact, contractive as any solution \((z_1,z_2)\) of
satisfies
Moreover, the map \(f : Y \rightarrow Y\) is locally Lipschitz continuous, as estimates for \(\left\| y\right\| _{\hbox {H} ^{2}(S^1)}\) are already known from the result for \(k=3\). Invoking [26, Thm. 5.8] we infer that it exists a maximal time of existence \(T_{m} \in (0,\infty ]\) and a unique strong solution \((z_1,z_2)\) of (2.8) with
Now that we have obtained \(z_1\) we may define some \({\tilde{y}}\) as the primitive of \(z_1\) with mean value zero. It is straightforward to check, by integrating (2.8), that \({\tilde{y}}\) indeed solves (1.3). As the solution of (1.3) is unique we have \(y = {\tilde{y}}\) which implies \(z_1 = \partial _x y.\) This induces the desired additional regularity of y.
The equations for higher spatial derivatives of y can be obtained analogously to (2.8) and the arguments can be modified in a straightforward fashion.
3 Semi-discrete dG scheme
We consider the approximation of (1.2) by a semi-discrete discontinuous Galerkin scheme. To define the scheme let us first introduce some standard notation: Let \(I:=[0,1]\) be the unit interval and choose \(0 = x_0 < x_1 < \dots < x_N = 1.\) We denote \(I_n=[x_n,x_{n+1}]\) to be the nth subinterval and let \(h_n:= x_{n+1}-x_n\) be its size. By \(\mathfrak {h}\) we denote the mesh-size function \(S^1 \rightarrow [0,\infty ).\), \(\text { i.e., }\) \(\mathfrak {h}|_{I_n}=h_n\) and \(h:= \max h_n.\) For the purposes of this work, we will assume that \(h N \le C\) for some \(C>0\). For \(q \ge 1\) let \(\mathbb P ^{q}(I)\) be the space of polynomials of degree less than or equal to q on I, then we denote
to be the usual space of piecewise qth order polynomials for functions over I. By
we denote the subspace of functions with vanishing mean. In addition we define jump and average operators by
We will also denote the \(\hbox {L} _{2}\) projection operator from \(L^2(S^1)\) to \(\mathbb V _q\) by \(P_q\).
We will examine semi-discrete numerical schemes which are based on the following reformulation of (1.2) using an auxiliary variable \(\tau \):
In the semi-discrete numerical scheme the quantities \( u_h, v_h \in \hbox {C} ^{1}([0,T),\mathbb V _q)\) and \( \tau _h \in \hbox {C} ^{0}([0,T),\mathbb V _q)\) are determined such that
given the initial conditions \(u_h(0,\cdot ) =P_q [u_0], v_h(0,\cdot )=P_q[v_0],\) where \(P_q\) is the \(\hbox {L} _{2}\) projection \(\hbox {L} _{2}(S^1) \rightarrow \mathbb V _q.\) In (3.5) \(G^\pm : \mathbb V _q \rightarrow \mathbb V _q\) denote discrete gradient operators and \(a_h^d: \mathbb V _q \times \mathbb V _q \rightarrow \mathbb R \) is a symmetric, bilinear form which is a consistent discretisation of the weak form of the Laplacian. We will describe our assumptions on \(a_h^d\) below. For any \(w \in \mathbb V _q\) the discrete gradients \(G^\pm [w]\) are defined by
where the periodic boundary conditions are accounted for by \([\![w]\!]_0\,{:=}\,w(x_N^-)-w(w_0^+).\)
In the sequel we will use the convention that \(C > 0\) denotes a generic constant which may depend on q, the ratio of concurrent cell sizes, \(\gamma \), W, but is independent of \({\mathfrak {h}}\) and the exact solution \(\left( {u,v}\right) \). We impose that the bilinear form \(a_h^d\) is coercive and stable with respect to the dG-norm, \(\text { i.e., }\) there exists a \(C>0\) such that for all \(w,{\tilde{w}} \in \mathbb V _q\)
where
A classical choice for \(a_h^d\) satisfying (3.7) is the interior penalty method
for some \(\sigma \gg 1,\) and \(\{\!\{\partial _xw \}\!\}_0\,{:=}\,\tfrac{1}{2} ( \partial _xw(x_N^-)+\partial _xw(x_0^+)).\) In addition, we need \(a_h^d\) to satisfy the following approximation property. For some \(w \in \hbox {H} ^{2}(S^1)\) let \(\mathfrak {P}[w]\) be the Riesz projection of w with respect to \(a_h^d\), \(\text { i.e., }\) the unique function in \(\mathbb V _q\) satisfying
We impose on \(a_h^d\) that for every \(w \in \hbox {H} ^{q+1}(S^1)\) we have
These conditions are also satisfied by the interior penalty method (3.9), see [10, Cor. 4.18, Thm. 4.25] and [6, Thms. 5.1,5.3].
Let us note some properties of the discrete gradient operators, which follow from [18, Prop. 4.4] and by standard inverse and trace inequalities
Lemma 2
(Properties of discrete gradients) The discrete gradients \(G^\pm \) have the following duality property:
The discrete gradients \(G^\pm \) have the following stability property: For all \(q \in \mathbb N \) there exists \(C>0\) independent of h such that
Proof
The proof of (3.12) follows immediately from the definition of \(G^\pm [\cdot ]\), indeed
The proof of (3.13) uses standard inverse inequalities. \(\square \)
Remark 1
(Discrete entropy inequality) Using the test functions \(\varPhi =\tau _h\), \(\varPsi =v_h\) and \(Z=\partial _t u_h\) in (3.5) and employing the duality (3.12) it is straightforward to see that our semi-discrete scheme satisfies the following entropy dissipation equality for \(0 < t <T\)
The reader may note that this is similar to the entropy dissipation equality obtained in the fully discrete case in [17]. However there are also differences: In [17] the authors required the dissipative term to be coercive (with respect to the dG-norm) and “central” discrete gradients were used instead of the one sided versions \(G^\pm \) here.
Remark 2
(\(\hbox {L} _{\infty }\) bound for \(u_h\)) As the numerical scheme dissipates discrete energy, \(a_h^d\) is coercive, see (3.7), \((\mathbb V _q , \Vert \cdot \Vert _{\hbox {dG}})\) is embedded in \((\hbox {L} _{\infty }(S^1),\Vert \cdot \Vert _{\hbox {L} _{\infty }})\) and the mean of \(u_h\) is constant in time we observe that \(\left\| u_h\right\| _{\hbox {L} _{\infty }(0,T;\hbox {L} _{\infty }(S^1))}\) is bounded in terms of the initial (discrete) energy.
Remark 3
(Choice of discrete operators) While the precise choices of “surface energy” and dissipation terms (on the discrete level) were somewhat arbitrary in [17] this is not the case here. Our analysis heavily relies on the fact that \(a_h^d\) is coercive on \(\mathbb V _q^m\) in order to infer an error estimate from the relative entropy estimate Corollary 1. We choose the same kind of gradient operators for discretising the viscous term in (3.5) as for the gradient in the continuity equation in order to simplify the estimates for the residual \(R_v\) in Proposition 3. Let us finally note that the roles of \(G^+\) and \(G^-\) in (3.5) could be interchanged.
Lemma 3
(Stability of the \(\hbox {L} _{2}\) projection) The \(P_q\) projection is stable with respect to the dG-seminorm.
Proof
Arguing similarly to the proof of [15, Lem4.6] we have for any \(w \in \hbox {H} ^{1}(\mathscr {T} ^{})\)
concluding the proof. \(\square \)
We are now in position to prove the existence of solutions to (3.5) for arbitrary long times:
Lemma 4
[Existence and uniqueness to the discrete scheme (3.5)] For given initial data \(u_h^0, v_h^0 \in \mathbb V _q\) the ODE system (3.5) has a unique solution \((u_h,v_h,\tau _h) \in \left( {\hbox {C} ^{1}((0,\infty ),\mathbb V _q)}\right) ^3\).
Proof
To some \(w_h \in \mathbb V _q\) let \(\varDelta _h w_h\) denote the unique element of \(\mathbb V _q\) satisfying
Using this notation we may remove \(\tau _h\) from (3.5) and rewrite it as
This can be written in more abstract form as
with
Note that \(f: (\mathbb V _q)^2 \rightarrow (\mathbb V _q)^2\) is continuous, due to inverse estimates and stability of projection operators. As \(\mathbb V _q\) is finite dimensional we do not need to choose a norm on \(\mathbb V _q.\) From Remark 1, the coercivity of \(a_h^d\) (3.7) and the fact that the mean value of \(u_h\) does not change over time we infer that z(t) remains in some bounded set \( K \subset (\mathbb V _q)^2\) (depending on the initial data) as long as a classical solution exists. Note that this conclusion does not require any growth assumptions on W. Note also that K can be chosen such that for any initial data \( z^0 \in K\) solutions remain in K. For any \(z \in (\mathbb V _q)^2\) we have that
with
Thus, the regularity of W implies that \(\mathrm {D}f(z) \) is a uniformly bounded operator for all \(z \in K.\) Thus, Picard–Lindelöf’s theorem implies that for any initial data \(z^0 \in K\) there is a local solution to (3.5) with a minimal time of existence bounded uniformly from below.
Let us now assume that initial data \(z^0 \in (\mathbb V _q)^2\) are given and there is a maximal finite interval of existence \([0,T_m)\) with \(T_m < \infty \) of the associated solution. Let K be the set of elements in \((\mathbb V _q)^2\) with energy smaller or equal to the energy of the initial data. Then the solution can be evaluated on an increasing sequence of times \((t_i)_{i \in \mathbb N}\) with
Then, there is some i such that the difference between \(T_m\) and \(t_i\) is smaller that the minimal time of existence of solutions for (3.5) with initial data in K. Thus, we can extend the solution on \([0,T_m)\) by the solution with “initial” data \((t_i,z(t_i))\) which is a contradiction to the maximality of \(T_m.\) \(\square \)
4 The discrete relative entropy framework
The stability analysis of (nonlinear systems of) hyperbolic conservation laws is based on the relative entropy framework, which transfers the knowledge about the energy dissipation inequality into estimates for differences of solutions. This framework cannot be used here directly as W, and therefore the whole energy, is not convex. It was shown in [16], however, that the higher order regularization terms in (1.2) make it possible to consider only part of the relative entropy and thereby obtain stability results. In this section we will employ the fact that our semi-discrete scheme (3.5) satisfies a discrete energy inequality, see Remark 1, in order to obtain a discrete version of the results in [16].
Definition 1
(Discrete reduced relative entropy) For tuples \((u_h,v_h,\tau _h)\) and \(({\tilde{u}}_h,{\tilde{v}}_h,{\tilde{\tau }}_h) \in \hbox {C} ^{0}([0,T],\mathbb V _q)^3 \) we define the reduced relative entropy between them as
Lemma 5
(Discrete reduced relative entropy rate) Let \((u_h,v_h,\tau _h)\) be a solution of (3.5) and let
be a solution of the following perturbed problem
S for some \(R_u,R_v,R_\tau \in \hbox {C} ^{0}([0,T),\mathbb V _q).\) Then the rate (of change) of the discrete reduced relative entropy satisfies
Remark 4
(Impact of different residuals) If we consider applying Gronwall’s Lemma to (4.3) we observe that the residual \(R_u\) is more problematic than \(R_v,R_\tau \) as it is multiplied by \(\tau _h - \tau _h\) which is not controlled by the reduced relative entropy. While it is possible to replace this term using (3.5)\(_3\) and (4.2)\(_3\) this would in turn introduce a term \(a_h^d(u_h - {\tilde{u}}_h,R_u)\), which includes derivatives of \(R_u\). Therefore, our projections in Section 6 will be constructed such that \(R_u=0\). The discrete relative entropy rate in this case is considered in more detail in the subsequent corollary.
Corollary 1
(Estimate of reduced relative entropy) Let the conditions of Lemma 5 be satisfied with \(R_u=0.\) Let \({\tilde{u}}_h\) be bounded in \(\hbox {L} _{\infty }(0,T;\hbox {W} _{\infty }^{1}( S^1))\) and satisfy
Then, there exists a constant \(C{>}0\) depending only on \(\gamma ,T, u_0, v_0, \left\| {\tilde{u}}_h\right\| _{\hbox {L} _{\infty }(0,T;\hbox {W} _{\infty }^{1}(S^1))}\) such that for \(0 \le t \le T\)
Therefore, Gronwall’s Lemma implies (for \(0 \le t \le T\))
Proof
Upon using \(R_u=0\), (3.12) and Young’s inequality on the assertion of Lemma 5 we obtain
Because of Lemma 2, (4.6) implies
Using the stability of the \(\hbox {L} _{2}\) projection with respect to the dG-norm we get
For the second inequality in (4.8) we have used the fact that
because \(\left\| W\right\| _{\hbox {W} _{\infty }^{3}[-M,M]}\) is bounded for
The assertion of the Lemma follows from (4.8) as
due to (4.4). \(\square \)
Remark 5
(Parameter dependence) Note that the constant M in (4.10) depends on \(\gamma .\) In particular, due to (2.7) and Remark 1,
where \(C_P\) is the Sobolev embedding constant apearing when the \(\hbox {L} _{\infty }\) norm is estimated by the \(\hbox {H} ^{1}\) semi-norm for functions with mean value zero. This, induces a subtle dependence of C in (4.5) on \(\gamma \) which is intertwined with the growth behaviour of W and its derivatives. To make this more precise later let us define
There is an additional \(\gamma \) dependence of the constant C in the statement of Corollary 1 which enters when
is estimated by \(C \eta _R.\) Taking (4.11)–(4.13) into account we find that
This dependence is inherited by all the constants C in the subsequent results.
For clarity, we will explicitly give the dependence for the potential \(W(u)=(u^2-1)^2\) which will be the subject of numerical investigations in Sect. 7. It holds that
for small \(\gamma .\)
Note that if the second derivative of W is globally bounded then \(k(\gamma )\) is, in fact, independent of \(\gamma \).
In case the reader takes special interest in the sharp interface case \(\gamma \rightarrow 0\) we like to state the following result which shows that the previous estimate can also be obtained in a more uniform-in-\(\gamma \) version. However, in that case, the stability constant sensitively depends on \(\mu \).
Corollary 2
(Estimate of modified relative entropy) Let the assumptions of Lemma 5 be satisfied with \(R_u=0.\) Let \(|W''|\) be uniformly bounded. Then, there exists a constant \(C>0\) depending only on \(\mu ,T, u_0, v_0, \left\| W''\right\| _{\hbox {L} _{\infty }(\mathbb R)}\) such that for \(0 \le t \le T\)
satisfies
Therefore, Gronwall’s Lemma implies (for \(0 \le t \le T\))
Proof
Starting from (4.3) with \(R_u=0\) and \(|W''|\) uniformly bounded we find
In addition, because of (3.5)\(_1\) and (4.2)\(_1\), it holds
Adding (4.16) and (4.17) we obtain
which proves (4.14) and (4.15) follows by Gronwall’s inequality. \(\square \)
Remark 6
[Parameter dependence of the constant in (4.15)]
-
1.
Note that the constant C in (4.15) scales like \(1/\mu \) for \(\mu \rightarrow 0.\)
-
2.
If we would not assume that \(\left| W''\right| \) is globally bounded, we would obtain that the constant C in the statement of Corollary 2 is bounded by \(k^2(\gamma )/\mu \) where we have used notation from Remark 5.
Proof of Lemma 5
A direct computation shows
Using \(Z=\partial _t (u_h - {\tilde{u}}_h)\) and \(\varPsi =v_h - {\tilde{v}}_h\) in (3.5) and (4.2) we infer from (4.19) that
Using \(\varPhi =(\tau _h- {\tilde{\tau }}_h)\) as a test function in (3.5) and (4.2) and employing (3.12) we obtain
As \(( \partial _t u_h - \partial _t {\tilde{u}}_h) \in \mathbb V _q\) for each \(0 \le t \le T\) we may replace \((W'(u_h) -W'({\tilde{u}}_h))\) by its \(\hbox {L} _{2}\) projection \(P_q [W'(u_h) -W'({\tilde{u}}_h)]\) in (4.19). Upon using \(\varPhi = P_q [W'(u_h) -W'({\tilde{u}}_h)]-R_\tau \) in (3.5) and (4.2) we obtain the assertion of the Lemma from (4.21).
5 Projections and perturbed equations
Let (u, v) be a strong solution of (1.2), see Proposition 1. We aim at determining projections of (u, v) and \(\tau := W'(u) - \gamma \partial _{xx}u \) so that these projections form a perturbed solution of (3.5) such that there is no residual in the first equation and the residuals in the other equations are of optimal order.
It is important to appropriately account for the highest order derivative, as such, we project u by the Riesz projection, defined in (3.10). Let us note that due to the linearity of the definition of the Riesz projection we have
Since our aim is ensuring that the projections satisfy (3.5)\(_1\) exactly, this already determines the discrete gradient of the projection of v. Before we can focus on the projection of v we need to investigate the kernel and range of the gradient operators \(G^\pm \). To this end we need to introduce some notation: By \(l_k\in \mathbb P ^{k}(-1,1)\) we denote the k-th Legendre polynomial on \((-1,1)\) and by \(l_k^n\) its transformation to the interval \(I_n\), \(\text { i.e., }\)
Let us gather the key properties of the Legendre polynomials which we will employ in the sequel:
Proposition 2
(Properties of the Legendre polynomials [3]) The transformed Legendre polynomials \(l_k^n\) have the following properties
Let us point out the following convention in our notation for the subsequent calculations: Superscripts will usually refer to the element/interval/vertex under consideration while subscripts refer to the polynomial degree. The only exception is \(h_n\) denoting the length of the nth interval.
Lemma 6
(The kernel of \(G^\pm \)) The kernel of each of the operators \(G^\pm : \mathbb V _q \rightarrow \mathbb V _q\) defined in (3.6) is one dimensional and consists of the functions which are constant everywhere. The range of \(G^\pm \) is \(\mathbb V _q^m.\)
Proof
We will give the proof for the kernel of \(G^+,\) the modifications for \(G^-\) are straightforward. Consider \(\varPhi \in \mathbb V _q\) with \(G^+[\varPhi ]=0.\) Let us fix some n and define \(\varPsi \in \mathbb V _q\) by
we find, as \(\partial _x(\varPhi |_{I_n}) \in \mathbb P ^{q-1}(I_n),\)
As n was arbitrary we obtain that \(\varPhi \) is continuous. The continuity of \(\varPhi \) implies
Therefore, \(\varPhi \) is continuous and constant in each interval. Thus, \(\varPhi \) is globally constant and the assertion for the kernel is proven. We infer from the result for the kernel that the range of \(G^\pm \) has codimension 1. The proof is concluded by the observation
which implies that the range of \(G^\pm \) is a subset of \(\mathbb V _q^m.\) \(\square \)
Remark 7
(Properties of one sided gradients) The properties of \(G^\pm \) asserted in Lemma 6 distinguish them from the “central” discrete gradients used in [17] which may have 2-dimensional kernels.
Our next aim is to show the following discrete Poincaré inequality:
Lemma 7
(Discrete Poincaré inequality) There exists a constant \(C>0\) independent of h such that
Proof
For each interval \(I_n\) let \(D_n\) denote the map
Since \(\ker {D_n}\) is trivial, as it consists of functions which are constant and orthogonal to constant functions, we have that \(D_n\) is invertible. Comparing \(D_n\) to the analogous map on \((-1,1),\) instead of \(I_n,\) we obtain that \(\Vert D_n^{-1}\Vert _2 =\mathcal {O}( h_n)\), where \(\left\| \cdot \right\| _2\) denotes the Euclidean matrix norm. Let us now write the functions under consideration as linear combinations of transformed Legendre polynomials in each interval

with real numbers \((g^n_r)_{r=0,\dots ,q}^{n=0,\dots ,N-1}\), \((a^n_r)_{r=0,\dots ,q}^{n=0,\dots ,N-1}\), \((b^n_r)_{r=0,\dots ,q-1}^{n=0,\dots ,N-1}.\) Let \(\chi ^n\) denote the characteristic function of \(I_n\). Then we have by definition of \(G^-\)
as \(\partial _x \varPhi \) is orthogonal to \(l^n_q\) and \((l^n_r -l^n_q)(x_{n+1}^-)=0,\) and
because \(l^n_q(x_{n+1}^-)=1.\) This implies
From (5.9)\(_1\) we infer
For \(\mathbf {a}^n={(a_1^n,\dots ,a_q^n)}^{{\varvec{\intercal }}},\) \(\mathbf {g}^n= {(g_0^n,\dots ,g_{q}^n)}^{{\varvec{\intercal }}},\) and \(\mathbf {b}^n={(b_0^n,\dots ,b_{q-1}^n)}^{{\varvec{\intercal }}}\) we have \(\left\| \mathbf {b}^n\right\| \le C \left\| \mathbf {g}^n\right\| \) and \(\mathbf {b}^n = D_n \mathbf {a}^n\) such that
as \(\Vert D_n^{-1}\Vert _2 =\mathcal {O}(h_n)\).
From (5.9)\(_2\) we infer
with \(c^n = \mathcal {O}(h_n (\left\| \mathbf {g}^n\right\| + \left\| \mathbf {g}^{n+1}\right\| ))\) for each n due to (5.11). As \(\varPhi \in \mathbb V _q^m\) we have \(\sum _{n=0}^{N-1} a_0^n =0.\) Therefore, \(\tilde{ \mathbf {a}} ={(a^0_0,\dots , a^{N-1}_0)}^{{\varvec{\intercal }}}\) and \(\mathbf {c} ={(c^0, \dots , c^{N-1})}^{{\varvec{\intercal }}}\) satisfy
where we used Jensen’s inequality, the definition of \(c^n\) and Cauchy-Schwarz inequality. Combining the preceding estimates we conclude
where we have used that hN is bounded. \(\square \)
Definition 2
(Projection Q) For \(q \in \mathbb N \) we define \( S_q^\pm : \hbox {C} ^{0}(S^1) \rightarrow \mathbb V _q \) by
We also define \(Q: \hbox {C} ^{1}(S^1) \rightarrow \mathbb V _q \) by
Note that Q[w] is well-defined by (5.15) due to Lemma 6 and the fact that \(\int _{S^1} \mathfrak {P}[\partial _xw] \,\mathrm {d}x=\int _{S^1} \partial _x w\,\mathrm {d}x =0\) as w is periodic.
Lemma 8
(Properties of the projection operator Q) The projection operators from Definition 2 satisfy the following estimates: There exists a \(C>0,\) independent of h, such that for every \(w \in \hbox {H} ^{q+3}(S^1)\)
Proof
The first assertion follows from the fact that \(S_q^\pm \) is exact for functions in \(\mathbb V _q.\) We obtain the second assertion as follows: Let \(\mathbb U {:=} \{ \varPsi \in \mathbb V _q : \left\| \varPsi \right\| _{\hbox {L} _{2}(S^1)}=1\},\) then
because of the properties of \(\mathfrak {P},\) see (3.11), Q, (3.12) and \(P_q\) as \(\hbox {C} ^{q+2}(S^1) \subset \hbox {H} ^{q+3}(S^1).\) The third assertion is a consequence of the second and Lemma 7. \(\square \)
Definition 3
(Projection R) Let \(\tau \in \hbox {C} ^{0}([0,T],\hbox {H} ^{1}(S^1))\) and \(u \in \hbox {C} ^{0}([0,T],\hbox {H} ^{3}(S^1))\) be related by \(\tau = W'(u)-\gamma \partial _{xx} u.\) Then, the projection \(R[\tau ] \in \hbox {C} ^{0}([0,T],\mathbb V _q)\) is defined by
Lemma 9
(Perturbed equations) Let (u, v) be a strong solution of (1.2) and \(\tau {:=}W'(u)-\gamma \partial _{xx} u.\) Then, the projections \((\mathfrak {P}[u],Q[v],R[\tau ])\) satisfy
with
Proof
The first equation in (5.18) is a direct consequence of the definition of Q[v] in Definition 2. The second equation in (5.18) follows from
and the duality (3.12). The third equation follows from the definition of \(R[\tau ] \) in Definition 3. \(\square \)
Lemma 10
(Coercivity of \(G^-\) ) There exists a constant \(C>0\) only depending on q such that for every \(w \in \mathbb V _q\)
Proof
Let us use
in (3.6). Upon noting \(\partial _x w|_{I_n} \perp l^n_q\) and \(\varPsi (x_{n+1}^-) = \frac{[\![w]\!]_{n+1}}{h_n+h_{n+1}}\) we obtain
It remains to determine a bound for \(\left\| \varPsi \right\| _{\hbox {L} _{2}}\). Let \(\{ y_k\}_{k=0}^{q}\) denote Gauss-Radau points on \([-1,1]\) and \(\{ y_k^n\}_{k=0}^{q}\) their image under the map
such that \(y^n_0 =x_{n+1}\). By \(\omega _k\) we denote the weights of Gauss-Radau quadrature. Due to the exactness of Gauss-Radau quadrature for polynomials of degree 2q and the properties of Legendre polynomials, see Proposition 2, we find
Summing over n implies that
Combining (5.21) and (5.23) gives the desired result, as
\(\square \)
6 Main result
This section is devoted to the proof of the main result of this work, which reads as follows:
Theorem 1
(Reduced relative entropy error estimate) Let the exact solution (u, v) of (1.2) satisfy
and let \(W \in \hbox {C} ^{q+3}(\mathbb R,[0,\infty )).\) Then there exists \(C>0\) independent of h, but depending on \(q,T,\gamma , \left\| u\right\| _{\hbox {L} _{\infty }(0,T; \hbox {W} _{\infty }^{1}(S^1))}\) such that
Theorem 1 is a direct consequence of the subsequent proposition, the estimates (3.11)\(_1\) and (5.16) and Lemma 10.
Proposition 3
(Discrete stability estimate) Under the assumptions of Theorem 1 there exists \(C>0\) independent of h, but depending on \(q,T,\gamma , \left\| u\right\| _{\hbox {L} _{\infty }(0,T; \hbox {W} _{\infty }^{1}(S^1))}\) such that
Proof
As the subsequent estimates are uniform in time (on [0, T]) we omit the time dependency. In order to see that Corollary 1 can be applied to (5.18) we need \(\mathfrak {P}[u]\) to be bounded in \(\hbox {L} _{\infty }(0,T;\hbox {W} _{\infty }^{1}(S^1)).\) This follows from (3.11) and our assumptions on u. In particular, we may use the fact that \(\left\| W\right\| _{\hbox {W} _{\infty }^{3}}\) is bounded on \([-M,M]\) with \(M:= \max \{\left\| \mathfrak {P}[u]\right\| _{\hbox {L} _{\infty }},\left\| u_h\right\| _{\hbox {L} _{\infty }}\}.\)
As we can apply Corollary 1 and Lemma 10 it remains to estimate \(\eta _R(0)\), \(\left\| R_v\right\| _{\hbox {L} _{2}([0,T]\times S^1)} \) and \(\left\| R_\tau \right\| _{\hbox {L} _{2}([0,T]\times S^1)}.\) It holds
by the properties of \(P_q, \mathfrak {P}, Q\) and \(\hbox {C} ^{q+2}(S^1) \subset \hbox {H} ^{q+2}(S^1)\subset \hbox {C} ^{q+1}(S^1).\)
As \(|W''|\) is bounded on the interval of interest
To estimate \(R_v\) we decompose it as \(R_v = -R_v^1 + R_v^2+R_v^3\) with
The estimate \(\left\| R_v^1\right\| _{\hbox {L} _{2}(S^1)}\le C h^{q+1} \left\| \partial _t v\right\| _{\hbox {C} ^{q+2}(S^1)} \) follows from \(\partial _t Q[v]=Q[\partial _t v]\), (5.16)\(_3\), the stability of \(P_q,\) and our assumptions on v. Before we consider \(R_v^2\) let us recall \(\mathbb U {:=} \{\varPsi \in \mathbb V _q : \left\| \varPsi \right\| _{\hbox {L} _{2}(S^1)}=1\}\) and note that
by definition of \(\mathfrak {P}[u].\) As
we find, due to (3.12), and inverse and trace inequalities, see [10, Lemmas1.44,1.46],
Finally we compute, using (3.12), and inverse and trace inequalities again:
In the last step we used (5.16)\(_1\) and (3.11). Combining Corollary 1 with (6.4)–(6.8) we obtain the assertion of this Proposition. \(\square \)
Remark 8
(Parameter depenence) Note that the constant C in the statement of Theorem 1 behaves like \(\exp (\frac{k(\gamma )^2}{\gamma } T).\) This is a consequence of Remark 5 and the use of Gronwall’s lemma.
Remark 9
(Viscosity) Note that we need \(\mu >0\) only in order to guarantee existence of sufficiently regular solutions for small times. If for \(\mu =0\) the exact solution is sufficiently regular, all our estimates also hold true in this case.
Using the stability induced by Corollary 2 and the estimates for the residuals derived in the proof of Theorem 1 we have the following estimate with constants independent of \(\gamma .\) This result should not be understood as an estimate in the case \(\gamma =0\) but as a uniform estimate in the sharp interface limit case \(\gamma \rightarrow 0.\)
Theorem 2
(Modified entropy error estimate) Let the assumptions of Theorem 1 be satisfied and let \(|W''|\) be uniformly bounded. Then, there exists \(C>0\) independent of h, but depending on \(q,T,\mu \) such that
Remark 10
(Parameter depenence) Note that the constant C in the statement of Theorem 2 behaves like \(\exp (\frac{1}{\mu } T).\) If \(|W''|\) was not uniformly bounded it would behave like \(\exp (\frac{k(\gamma )^2}{\mu } T).\) Both statements are consequences of Remark 6 and the use of Gronwall’s lemma.
Remark 11
(Multiple space dimensions) The only difficulty in extending the analysis presented here to the multi-dimensional version of the problem investigated in [16] is to construct multi-dimensional discrete gradients with one dimensional kernel. We need this to be able to find a projection of v which is of optimal order. It should be noted though, that the aforementioned model is physically inadmissible, and probably the multi-dimensional model which should be studied in the future is the Navier–Stokes–Korteweg model.
7 Numerical experiments
In this section we conduct some numerical benchmarking.
Definition 4
(Estimated order of convergence) Given two sequences a(i) and \(h(i)\searrow 0\), we define estimated order of convergence (\(\hbox {EOC}\)) to be the local slope of the \(\log a(i)\) vs. \(\log h(i)\) curve, i.e.,
In this test we benchmark the numerical algorithm presented in Sect. 3 against a steady state solution of the regularised elastodynamics system (1.2) on the domain \(\varOmega = [-1,1]\).
We take the double well
then a steady state solution to the regularised elastodynamics system is given by
For the implementation we are using natural boundary conditions, that is
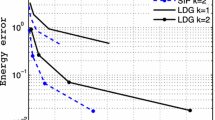
rather than periodic. The temporal discretisation is a perturbation of a 2nd order Crank–Nicolson method (see [17, §4] for details). Note that this temporal discretisation satisfies a fully discrete version of the entropy dissipation equality given in Remark 1. Tables 1, 2 and 3 detail three experiments aimed at testing the convergence properties for the scheme using piecewise discontinuous elements of various orders (\(p=1\) in Table 1, \(p=2\) in Table 2 and \(p=3\) in Table 3).
References
Abeyaratne, R., Knowles, J.K.: Kinetic relations and the propagation of phase boundaries in solids. Arch. Rational Mech. Anal. 114(2), 119–154 (1991). doi:10.1007/BF00375400
Andrews, G., Ball, J.M.: Asymptotic behaviour and changes of phase in one-dimensional nonlinear viscoelasticity. J. Differ. Equ. 44(2), 306–341 (1982). doi:10.1016/0022-0396(82)90019-5. Special issue dedicated to J. P. LaSalle
Arfken, G., Weber, H.: Mathematical Methods For Physicists International Student Edition. Elsevier Science (2005). http://books.google.de/books?id=tNtijk2iBSMC
Braack, M., Prohl, A.: Stable discretization of a diffuse interface model for liquid-vapor flows with surface tension. ESAIM: Math. Modell. Numer. Anal. 47, 401–420 (2013). doi:10.1051/m2an/2012032. http://www.esaim-m2an.org/article/S0764583X12000325
Chalons, C., LeFloch, P.G.: High-order entropy-conservative schemes and kinetic relations for van der Waals fluids. J. Comput. Phys. 168(1), 184–206 (2001). doi:10.1006/jcph.2000.6690
Chen, Z., Chen, H.: Pointwise error estimates of discontinuous galerkin methods with penalty for second-order elliptic problems. SIAM Journal on Numerical Analysis 42(3), 1146–1166 (2005). http://www.jstor.org/stable/4101072
Ciarlet, P.G.: The Finite Element Method for Elliptic Problems, vol. 4. Studies in Mathematics and its Applications. North-Holland Publishing Co., Amsterdam (1978)
Dafermos, C.M.: The second law of thermodynamics and stability. Arch. Rational Mech. Anal. 70(2), 167–179 (1979). doi:10.1007/BF00250353
Dafermos, C.M.: Hyperbolic Conservation Laws in Continuum Physics. Grundlehren der Mathematischen Wissenschaften, vol. 325, 3rd edn. Springer, Berlin (2010). doi:10.1007/978-3-642-04048-1
Di Pietro, D.A., Ern, A.: Mathematical Aspects of Discontinuous Galerkin Methods. Mathématiques & Applications (Berlin) [Mathematics & Applications], vol. 69. Springer, Heidelberg (2012). doi:10.1007/978-3-642-22980-0
Diehl, D.: Higher order schemes for simulation of compressible liquid-vapor flows with phase change. Ph.D. thesis, Universität Freiburg (2007). http://www.freidok.uni-freiburg.de/volltexte/3762/
DiPerna, R.J.: Uniqueness of solutions to hyperbolic conservation laws. Indiana Univ. Math. J. 28(1), 137–188 (1979). doi:10.1512/iumj.1979.28.28011
Engel, P., Viorel, A., Rohde, C.: A low-order approximation for viscous-capillary phase transition dynamics. Port. Math. 70(4), 319–344 (2014). doi:10.4171/PM/1937
Evans, L.C.: Partial Differential Equations, Graduate Studies in Mathematics, vol. 19. American Mathematical Society, Providence (1998)
Georgoulis, E.H., Lakkis, O., Virtanen, J.M.: A posteriori error control for discontinuous Galerkin methods for parabolic problems. SIAM J. Numer. Anal. 49(2), 427–458 (2011). doi:10.1137/080722461
Giesselmann, J.: A relative entropy approach to convergence of a low order approximation to a nonlinear elasticity model with viscosity and capillarity. SIAM J. Math. Anal. 46(5), 3518–3539 (2014). doi:10.1137/140951710
Giesselmann, J., Makridakis, C., Pryer, T.: Energy consistent discontinuous Galerkin methods for the Navier-Stokes-Korteweg system. Math. Comput. 83(289), 2071–2099 (2014). doi:10.1090/S0025-5718-2014-02792-0
Giesselmann, J., Pryer, T.: Reduced relative entropy techniques for aposteriori analysis of multiphase problems in elastodynamics. Submitted–tech report available on ArXiV (2014)
Hayes, B.T., Lefloch, P.G.: Nonclassical shocks and kinetic relations: strictly hyperbolic systems. SIAM J. Math. Anal 31(5), 941–991 (2000). doi:10.1137/S0036141097319826 (electronic)
Jamet, D., Torres, D., Brackbill, J.: On the theory and computation of surface tension: the elimination of parasitic currents through energy conservation in the second-gradient method. J. Comput. Phys 182, 262–276 (2002)
Karakashian, O., Makridakis, C.: Convergence of a continuous Galerkin method with mesh modification for nonlinear wave equations. Math. Comput. 74(249), 85–102 (2005). doi:10.1090/S0025-5718-04-01654-0
LeFloch, P.G.: Hyperbolic Systems of Conservation Laws. Lectures in Mathematics ETH Zürich. Birkhäuser Verlag, Basel (2002). doi:10.1007/978-3-0348-8150-0. The theory of classical and nonclassical shock waves
LeFloch, P.G., Thanh, M.D.: Non-classical Riemann solvers and kinetic relations. II. An hyperbolic-elliptic model of phase-transition dynamics. Proc. Roy. Soc. Edinb. Sect. A 132(1), 181–219 (2002). doi:10.1017/S030821050000158X
Makridakis, C.G.: Finite element approximations of nonlinear elastic waves. Math. Comput. 61(204), 569–594 (1993). doi:10.2307/2153241
Ortner, C., Süli, E.: Discontinuous Galerkin finite element approximation of nonlinear second-order elliptic and hyperbolic systems. SIAM J. Numer. Anal. 45(4), 1370–1397 (2007). doi:10.1137/06067119X
Pavel, N.H.: Nonlinear Evolution Operators and Semigroups. Lecture Notes in Mathematics, vol. 1260. Springer-Verlag, Berlin (1987)
Slemrod, M.: Admissibility criteria for propagating phase boundaries in a van der Waals fluid. Arch. Rational Mech. Anal. 81(4), 301–315 (1983). doi:10.1007/BF00250857
Slemrod, M.: Dynamic phase transitions in a van der Waals fluid. J. Differ. Equ. 52(1), 1–23 (1984). doi:10.1016/0022-0396(84)90130-X
Tian, L., Xu, Y., Kuerten, J.G.M., Van der Vegt, J.J.W.: A local discontinuous galerkin method for the propagation of phase transition in solids and fluids. J. Sci. Comp. 59(3), 688–720 (2014). doi:10.1007/s10915-013-9778-9
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Ralf Hiptmair.
J.G. was partially supported by the German Research Foundation (DFG) via SFB TRR 75 ‘Tropfendynamische Prozesse unter extremen Umgebungsbedingungen’. T.P. was partially supported by the EPSRC grant EP/H024018/1 and an LMS travel grant 41214.
Rights and permissions
About this article

Cite this article
Giesselmann, J., Pryer, T. Reduced relative entropy techniques for a priori analysis of multiphase problems in elastodynamics. Bit Numer Math 56, 99–127 (2016). https://doi.org/10.1007/s10543-015-0560-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10543-015-0560-2
Keywords
- Discontinuous Galerkin finite element method
- A priori error analysis
- Multiphase elastodynamics
- Relative entropy
- Reduced relative entropy