
Abstract
Results obtained from studies of the development of a device for non-invasive electrical stimulation of the phrenic nerve are presented. A block diagram of the device and schematics of key functional blocks are presented and the design of the device and the original software for its operation are described.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Artificial pulmonary ventilation (APV) is associated with a number of physiological complications, including ventilator-induced diaphragm dysfunction (VIDD). VIDD is the development of inspiratory weakness in patients connected to ventilators for long periods and is among the reasons for unsuccessful termination of respiratory support. The mechanisms of development of VIDD are associated with oxidative stress, proteolysis, and mitochondrial dysfunction, as well as passive overstretching of diaphragm fibers. Some 30–80% of patients in intensive care units require mechanical respiratory support. Mechanical ventilation for even 6–8 h leads to significant weakening of the diaphragm [1].
The clinical picture in this situation consists of an impairment to respiratory mechanics and patients being unable to breathe independent even when there is no other respiratory disorder. Atrophy of the diaphragm muscles during mechanical ventilation begins within 24 h, progresses rapidly, ad is accompanied by significant clinical consequences. VIDD is therefore an extremely relevant problem in modern medicine [2, 3].
Electrical stimulation of the phrenic nerve using invasive electrodes allows the condition of the diaphragm to be maintained by means of spasmodic contraction of the diaphragm muscles. However, widespread use of this method is limited by its risks, as well as the technical and environmental requirements of placing and maintaining invasive electrodes [4–6].
Non-invasive phrenic nerve stimulation is a promising alternative as a method of maintaining diaphragm function by overcoming these limitations [7–9].
The aim of the present report was to describe the principle of operation and design of an original device for non-invasive electrical stimulation of the phrenic nerve using electrodes applied to the neck.
Description of the device
Full-scale tests assessing the impact on the human phrenic nerve of application of the device for transcutaneous electrical stimulation of the diaphragm described in [10] showed that its stimulating signal lacks the necessary power. On the basis of the data from these tests, the following adjustments were made to the design of the device:
-
1.
an increase in the amplitude of the stimulation pulse current to 150 mA at a load of 2 kΩ;
-
2.
an increase in the number of stimulation channels to six to support determination of optimal electrode positions during electrical stimulation;
-
3.
the minimum possible duration of filling pulses was made 1 μsec with an accuracy of 0.5 μsec or better.
Structural diagram
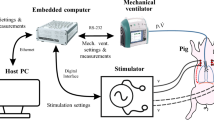
Based on the above requirements, a working prototype of a device for non-invasive stimulation of the phrenic nerve (hereinafter referred to as the device) was developed and constructed. The structural diagram of the device is shown in Fig. 1.

Block diagram of the device
Two independent AC/DC converters are used to provide all the supply voltages required for device operation. One power supply converts the 220 V input voltage into the ± 15 and + 5 V voltages required to operate the control elements and to generate pulses—the microcontroller (MCU), digital-to-analog converter (DAC), multiplexer, operational amplifiers, etc.). The second power supply outputs a voltage of up to 300 V as needed to generate the specified current through loads of 0–15 kΩ.
The device is controlled by an ARM family microcontroller type STM32F303CBT6. The MCU is clocked from a ZQ1 quartz resonator at 8 MHz; its own clock frequency is increased to 72 MHz using a phase-locked loop system. The MCU is programmed via a standard SWD interface using a specialized external programme. For ease of use, the microcontroller firmware can be updated via the USB interface. The MCU is also used to organize communication with a personal computer (PC) via the USB interface using a proprietary protocol. The USB interface circuits in this IC are protected from electrostatic discharges using a circuit design based on USBLC6-2SC6 protective diodes. The circuit also employs blocking capacitors to maintain the instantaneous voltage value in the power circuits at a constant level by blocking noise caused by the fact that the current consumption of the MCU is not constant over time.
A multiplexer allows selection of the direction (channel) for the current generated by the source controlled by the DAC. Thus, use of a multiplexer allows the device to be multichannel, with connections to several patients at the same time.
An electromagnetic relay provides mechanical switching of the output signal to each channel. This switching method increases device safety by ensuring that there are none of the leakage currents inherent in solid-state semiconductor relays.
Stimulation signal shape
The stimulation pulse sequence parameters generated by the PC are transmitted via USB to the MCU, which uses them to generate pulses using the AD5328BRUZ DAC, after which the signal is scaled to the required current values using a linear current source. The controlled current source circuit was constructed using an MC33274ADR2G op amp and a 2SC4106 output transistor with a feedback circuit connected to the emitter of the transistor such that the feedback voltage is proportional to the load current. The shunt resistor (16 Ω) was selected to ensure that the source can operate with loads of a wide range of resistances (0–15 kΩ). This generation method produces high-quality signals (no noise) with accuracy of no worse than ± 1 mA in setting the current through the load and no worse than 0.5 μsec for pulse duration.
This method supports generation of stimulation signals of complex shape (triangular, trapezoidal, sinusoidal) via changes in amplitude, period, duty cycle, and number of filling pulses (Fig. 2).

Stimulating signal shape
The voltages at the collector and emitter of the output transistor are “digitized” by the analog-to-digital converters (ADC) of the microcontroller and processed by software to identify open circuits in the load power supply. The operating channel is selected using 74HC4051PW multiplexers.
Operating modes are indicated using three LED installed on the device body: green, blue, and red. The green LED indicates connection to the power supply network and a personal computer, the blue indicates standalone operating mode, and the red shows that voltage is being generated in a channel.
Device operation is controlled using specialized software developed and installed on an external PC, which monitors functional state and provides visualization of stimulating signal shape.
The external appearance of the device is shown in Figs. 3 and 4.

Appearance of the device (front)

Appearance of the device (rear)
Software
The software is designed to configure all the amplitude and time parameters of the sequence of pulse series, to select the generation channel, to switch generation mode on and off, to signal breaks in the load power supply circuit, and to display information on the ongoing current through and voltage on the load and on the specified and ongoing load operating time. Settings are applied to a total of six parameters, divided into two groups: signal parameters (period, duty cycle, maximum amplitude) and filling pulse parameters (number of pulses, duty cycle, and pulse shape). When the signal period changes, the time between two points of identical amplitude, one in pulse n and the other in pulse n + 1 of the pulse sequence, changes. The “duty cycle” parameter of the signal provides adjustment of the ratio of pulse and pause within the period, while the “maximum amplitude” sets the amount of current supplied to the load. The “number of pulses” parameter determines the number of filling pulses in the signal. The “pulse shape” parameter sets the slope of the leading and falling edges of the signal pulse, supporting generation of triangular (“Pulse shape, % 1”), sinusoidal (“Pulse shape, % 50”), rectangular (“Pulse shape, % 100”), and trapezoidal shapes.
The working window of the program is shown in Fig. 5.

Device software interface
Conclusions
This study developed a device for non-invasive electrical stimulation of the phrenic nerve and software for its operation. The device minimizes the risk of complications in patients supported on ventilators and during procedures for the treatment of various respiratory diseases.
The device provides ample opportunities for selecting stimulation signal parameters, such that it can be used with success in collaborative development with specialists at the V. A. Almazov National Medical Research Center, Russian Ministry of Health, who developed the original Russian method for non-invasive electrical stimulation of the diaphragm.
References
Babaev MA, Bykov DB, Birg TM, Vyzhigina MA, Eremenko AA (2018) Ventilator-induced diaphragm dysfunction (review). obshch Reanimatol No 14(3):82–103
DiMarco, A. F., Kowalski, K. E., Geertman, R. T., and Hromyak, D. R., “Spinal cord stimulation: A new method to produce an effective cough in patients with spinal cord injury,” Am. J. Respir. Crit. Care Med., 173, No. 12, 1386 (2006).
Shehu I, Peli E (2008) Phrenic nerve stimulation. Eur J Anesth Suppl 42:186
DiMarco AF, Connors AF Jr., Kowalski KE (2004) Gas exchange during separate diaphragm and intercostal muscle breathing. J Appl Physiol 96(6):2120
DiMarco AF, Kowalski KE (2008) Effects of chronic electrical stimulation on paralyzed expiratory muscles. J Appl Physiol 104(6):1634
Karashurova ES, Karashurov ES (1993) Electrical stimulation of the diaphragm in patients with bronchial asthma. Ter Arkh 65(3):23
Dzyublik AYa, Stepanenko AV (1990) Electrical stimulation of respiratory muscles in the complex therapy of patients with chronic obstructive bronchitis. In: Russian], Gorbenko PP (eds) New Medical Technologies in the Prevention and Treatment of Respiratory Diseases, Collected Reports [in. Leningrad
Petrella RA (2018) Non-Invasive Picosecond Pulse System for Electrostimulation, Doctor of Philosophy (PhD). dissertation, Electrical/Computer Engineering, Old Dominion University
Safonov VA, Tarasova NN (2010) Electrical Stimulation of Respiration [in Russian. Science, Research Institute General Pathology and Pathophysiology, Russian Academy of Medical Sciences, Moscow
Li RV, Potrakhov NN, Ukhov AA, Shapovalov SV, Klyachkin LE, Bagraev NT, Malyarenko AM, Mazurok VA (2022) A device for transcutaneous stimulation of the diaphragm. meditsinsk Tekhn No 6(336):4–8
Acknowledgements
This study was supported by a grant from the Russian Science Foundation (project No. 22-25-20214).
This study was supported by a grant from the St. Petersburg Science Foundation in Accordance with Contract No. 15/2023 of April 14, 2022.
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated from Meditsinskaya Tekhnika, Vol. 57, No. 6, pp. 1–4, November-December, 2023.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Original article submitted September 29, 2023.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Li, R.V., Potrakhov, N.N., Ukhov, A.A. et al. A device for non-invasive electrical stimulation of the phrenic nerve. Biomed Eng 57, 367–370 (2024). https://doi.org/10.1007/s10527-024-10336-9
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10527-024-10336-9