
Abstract
In this article, we are interested in studying some dynamics aspects for the Armbruster Guckenheimer Kim galactic potential in a rotating reference frame. We introduce a non-integrability condition for this problem using Painlevé analysis. The equilibrium positions are given and their stability is studied. Furthermore, we prove the force resulting from the rotation of the reference frame can be used to stabilize the unstable maximum equilibrium positions. The periodic solutions near the equilibrium positions are constructed by applying Lyapunov method. The permitted region of motion is determined.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
One of the most important branches of Astrophysics is the galactic dynamics that has been developed in the last six decades or so,when most physicists and astronomers had a view of the physical world dominated by integrable or near-integrable systems (Contopoulos 2002). A large number of papers concerning the dynamics of galaxies has been appeared whose studied some dynamical aspects such as regular, chaotic behaviors of orbits, see, e.g.,(Caranicolas, 1989, 1990a, 1990b, 2000; Caranicolas and Innanen, 1991; Elipe et al., 1995; Calzeta and Hasi, 1993; Habib et al., 1997; Karanis and Caranicolas, 2001; Saito and Ichimura, 1979; Carlbeg and Innanen, 1987) and the existence of periodic orbits and their linear stability, see for instance (Alfaro et al., 2013; Llibre and Vidal, 2012, 2014; Llibre and Makhlouf, 2013; Llibre, 2002; Llibre et al., 2014; Llibre and Roberto, 2013). The Most of these studies include two types of models, one of them characterizes the global motion in galaxies, for example, the axially symmetric mass model that was utilized by Caranicolas (1996). The other type of these models describes the local galactic motion (i.e. near an equilibrium point) and it was made up of perturbed harmonic oscillators (Innanen 1985). It is well known that, in order to study the stellar orbits, the rotation of the galaxy must be taken into account (Zeeuw and Merritt 1983). In spite of, the elliptical galaxies rotate with small angular velocity, it is expected this will affect some of the dynamics aspects of the problem (see, e.g., Bertola and Capaccioli, 1975; Caranicolas and Barbanis, 1982; Illingworth, 1977).
In the present work, we consider the motion on the plane of rotation of a nearly axisymmetric galaxy which rotates with a constant angular velocity \(\omega \) around a fixed axis. Without loss of generality, we assume \(\omega \geq 0\) because \(\omega <0\) refers only to the rotation in opposite direction. This motion is described by the Hamiltonian
where the potential \(V\) here considered is given by
where \(a\) and \(b\) are free arbitrary parameters. This potential is known in literatures as the Armburster-Guckenheimer-Kim potential and it was introduced by Armbruster et al. (1989). It is a 2D-perturbed harmonic oscillator and it characterizes the local motion in the central area of a galaxy. This potential is obtained by expanding the global galactic potentials in a Taylor series near a stable equilibrium point (for more details, see, e.g., Pucacco et al., 2008; Caranicolas, 2002). The Armburster-Guckenheimer-Kim potential in a non-rotating reference frame was studied in many works (see, e.g., Llibre and Roberto, 2013; Habib et al., 1997; Kandrup, 2001; Kandrup and Novotny, 2004). Moreover, this potential is generic in its basic properties and convenient computationally due to a large number of computations could be performed.
Notice that the rotation of the reference frame leads to the presence of the term \(\omega (xp_{2}-yp_{1})\) which may also appear in various problems having different physical interpretations. For instance, the Hamiltonian (1) can be employed to describe the motion of a particle in the Euclidean plane under the action of Armbruster Guckenheimer Kim galactic potential in the presence of a constant magnetic field \(\omega \) perpendicular on the plane of the motion. The Hamilton equations are expressed as
where dots denote differentiation with respect to time. The Hamilton equations (3) admit the Jacobi integral:
where \(h\) is free parameter characterizing the value of Jacobi integral.
It is obvious, this problem has two degrees of freedom and so it is called integrable in the sense of Liouville-Arnold if it has one constant of the motion \(I_{2}\) besides the Jacobi integral (4) provided that they are linearly independent (i.e. the gradients vectors of \(I_{1}\) and \(I_{2}\) are independent in all points of the phase space except perhaps a set of zero measure) and in involution (i.e. \(\{I_{1},I_{2}\}=0\), where \(\{.,.\}\) denotes the Poisson brackets) (see, e.g., Abraham and Marsden, 1978; Arnold et al., 2006). Painlevé analysis, which relies on the analysis of singularities of the solution in the complex plane of time, is utilized to examine whether the problem under consideration is integrable or not. The Hamilton equations (3) are of Painlevé type if all movable singularities of its solutions are poles. This study can be made by using the ARS algorithm (see, e.g., Ablowitz et al., 1980; Bounits et al., 1982; Bountis, 1995; Tabor, 1988). This algorithm is briefly introduced in the Appendix to possess a self-sustaining paper. We will concentrate on the equilibrium points and study their stability as various qualitative properties of the dynamics can be concluded. Indeed, trapped and escape dynamics are regulated by the presence of critical points with special properties of stability. Furthermore, the presence of stable equilibrium point is significant in establishing self-consistent galaxy models from a given potential (Zeeuw and Merritt 1983). We will also focus on the effect of the angular velocity on the stability of the equilibrium points. We will also clarify the size of the regions of linear stability relies on the value of the angular velocity \(\omega \) and this will be graphically illustrated. The periodic, nearly equilibrium solutions of the problem under consideration will be studied by employing the Lyapunov method (Lyapunov 1956).
The present paper is organized as follows. In Sect. 2, we study the integrability of the problem using Painlevé approach. In Sect. 3, we find the equilibrium points. Next, in section 4, we study the stability of these equilibrium point using linear approximation. Section 5 contains the study of the periodic nearly equilibrium solutions using Lyapunov theorem. In Sect. 6, we determine the permitted regions. Finally, some concluding remarks are introduced.
2 Integrable cases
Indeed, in general, the Hamiltonian systems are non-integrable and integrable ones of them represent a rare exception. In this section, we aim to study the integrability of the present problem by using Painlevé analysis. The Hamilton equations (3) can be written in the form
Now, we apply the Painlevé analysis to (5) by following the ARS algorithm that is briefly introduced in Appendix A. The analysis begins with the leading order behavior. We look for the parameters in the leading order behavior of \(x(t)\) and \(y(t)\) in (5) by writing
where \(\alpha \), \(\beta \), \(p\) and \(q\) are constants to be evaluated. Inserting (6) into (5), we obtain the following pairs of leading order equations
From (7), the leading order behavior is given by \(p=q=-1\). Thus, the coefficients of \(\tau^{-3}\) in the two equations (7) are
Solving the two equations (8) and (9) for \(\alpha \) and \(\beta \), we have
where \(b+2a>0\). Thus, we have the following two leading order:
In order to find the resonances at which the required arbitrary constants appear, we put
where \(\sigma_{i}\) and \(r\) are constants. Inserting the expressions (11) in (5) and equating the coefficients of \(\tau^{r-3}\) in both sides, we obtain
where \(A_{1}\) and \(A_{2}\) are given by
The linear system (12) has non-trivial solutions if
Now, let us individually study each case. Taking into account (13)and considering case 1, (14)takes the form
As we know the complex resonances lead to the appearance of movable algebraic branch singularities which are not compatible with the integrability. Thus, the existence of such resonances proves the non-integrability of the problem. It is easy to prove that the resonances become complex if \(\frac{b}{a}\in{} ]{-}\infty ,-2[{}\cup{} ] \frac{18}{7},\infty {}[ \). Taking into account the condition \(b+2a>0\), the Hamilton equations (3) become non-integrable if \(\frac{b}{a}\in {}]\frac{18}{7},\infty {}[ \). We select certain values of \(\frac{b}{a}\in{} ]{-}2,\frac{18}{7}]\) that imply to an integer resonances. To avoid ambiguity, we summarize that in Table 1.
The same calculations corresponding to the case 2 give the same conditions on the two parameters \(a\), \(b\) as in Table 1. Therefore, we omit this case from our consideration. Now, we study the case in which \(b=2a\) in details and give the final results for the other cases \(b=0\) and \(b=-a\) without details as a result of their computations are similar to those in the case that will be studied.
Taking into account \(b=2a\), the resonances become −1, 1, 2 and 4. It is well known the resonance \(r=-1\) indicates to the free location of the singularity \(t_{0}\). To verify the presence of a sufficient number of arbitrary constants, let us assume
where \(m_{k}\) and \(n_{k}\) are constants. Inserting the expressions (16) into (5), and comparing the coefficients of powers of \(\tau \), we obtain
In order to have one of the two constants \(m_{1}\) or \(n_{1}\) be arbitrary, \(\omega \) must equal zero, i.e. \(\omega =0\). Thus the solution of (17) is \(m_{1}=-n_{1}\).
It is obvious the two equations in (18) are the same and thus, one of the two constants \(m_{2}\) or \(n_{2}\) is arbitrary. Consequently, we get
The solution of these equations is expressed as
It is easy to show that one of the two constants \(m_{4}\) or \(n_{4}\) is an arbitrary constant. Hence, the system (5) possesses the Painlevé property if \(\omega =0\), \(b=2a\). This gives the necessary conditions for the integrability and thus, the complementary integral must be constructed to guarantee the integrability. On another side, the problem is also integrable when \(b=0\) and \(b=-a\) in non-rotating frame i.e. \(\omega =0\) and they were introduced by Armbruster et al. (1989).
2.1 The integrable case \(\omega =0\), \(b=2a\)
It is clear that this integrable case corresponds the Armbruster Guckenheimer Kim galactic potential in non-rotating frame as a result of \(\omega =0\). The Hamiltonian (1) takes the form
This Hamiltonian is separable if the coordinates axes are rotated by angle \(\frac{\pi }{4}\), i.e., the new variables \((u,v,p_{u},p_{v})\) are given by
Inserting the transformation (23) into the Hamiltonian (22), we obtain
Consequently, the problem becomes separable and its integrals of motion are
where \(c_{1}\) and \(c_{2}\) are arbitrary constants. The general solution of the problem can be obtained by using the integrals of the motion (25). From the Hamilton equations corresponding the Hamiltonian (24), we have \(p_{u}=\dot{u}\), \(p_{v}=\dot{v}\). Inserting those in the integrals of motion (25) and separating the variables, we obtain
where \(u(0)=u_{0}\) and \(v(0)=v_{0}\) are admissible initial conditions. Depending on the values of the coefficients and chosen interval of motion, these integrals in (26) can be inverted, expressing in terms of Jacobi’s elliptic functions.
It should note that when \(\omega =0\) and \(b=-a\), the problem becomes separable in its coordinates. On another side, when \(\omega =0\) and \(b=0\), it is more suitable to use polar coordinates \((R,\varphi )\) which make \(\varphi \) cyclic variable and hence, the corresponding angular momentum represents the complementary integral which is called in literature as a cyclic integral. These two cases were previously discovered by Armbruster et al. (1989).
The following theorem summarizes the above results and the related results that were presented by Llibre and Roberto (2013)
Theorem 1
The Hamilton equations (3) corresponding to the Hamiltonian (1) with (2) are
-
(a)
non-integrable in a rotating references frame \(\omega \neq 0\) if \(\frac{b}{a}\in{} ]\frac{18}{7},\infty {}[ \).
-
(b)
non-integrable in a non-rotating references frame \(\omega =0\) (for more details, see Llibre and Roberto, 2013) except three cases (\(b=0\), \(b=-a\) and \(b=2a\)) in which the potential is separable.
As a result of non-integrability of the problem under consideration, we can derive some conclusions about its dynamics. For instance, the motion has a chaotic behavior, the trajectories of motion are irregular. Furthermore, it can be considered a perturbation of integrable systems near to them and thus it can be studied through various perturbations theories (see, e.g., Tabor, 1988).
3 Equilibrium points
The equilibrium positions of the system (1) can be determined by equating Hamilton equations (3) to zero. Thus, we have
Inserting (27) in (28), we get
The two equations (29) can be easily solved and the results are summarized in the following
Theorem 2
Let us consider the Hamilton equations (3) that are defined by the Hamiltonian (1), then there are at most nine equilibrium points. Moreover,
-
(i)
If \(\omega =1\) and \(b(2a+b)\neq 0\) or \(\omega \neq 1\) and \(a=b=0\), \(E_{1}=(0,0)\) is the unique equilibrium point.
-
(ii)
If \(\omega <1\), \(a>0\) or \(\omega >1\), \(a<0\), there are five Equilibrium points: \(E_{1}\), \(E_{2,3}=(0,\pm \sqrt{\frac{1-\omega ^{2}}{a}})\) and \(E_{4,5}=(\pm \sqrt{\frac{1-\omega^{2}}{a}}, 0)\).
-
(iii)
If \(\omega <1\), \(b>-2a\) or \(\omega >1\), \(b<-2a\) there are five equilibrium points: \(E_{1}\) and \(E_{6,7,8,9}=(\pm \sqrt{\frac{1- \omega^{2}}{b+2a}}, \pm \sqrt{\frac{1-\omega^{2}}{b+2a}})\).
Notice, the equilibrium positions are expressed as \((x,y)\) and the corresponding values of \(p_{1}\) and \(p_{2}\) can be directly calculated from equation (27). It is evident if \(\omega <1\), \(a>0\) or \(\omega >1\), \(a<0\) there is a limiting case when \(a\) tends to zero. If \(a\) tends to zero, the equilibrium points \(E_{2,3}\) blow up to infinity through the positive or negative \(Y\) axis depending on the sign of \(Y\)-component of \(E_{2,3}\) while the equilibrium positions \(E_{4,5}\) blow up to infinity through the positive or negative \(X\)-axis relying on the sign of the \(X-\)components of \(E_{4,5}\). If \(\omega <1\), \(b>-2a\) or \(\omega >1\), \(b<-2a\), there are limiting case when \(b\) tends to \(-2a\). If \(b\) tends to \(-2a\), the equilibrium positions \(E_{6,7,8,9}\) blow up to infinity through the one of the lines \(x=y\) or \(x=-y\) depending on the sign of the coordinates of the equilibrium position. If both \(a\) and \(b\) are zero, the dynamics of reduces to that of a linear system and can be effortlessly comprehended. On another hand, if \(a\) and \(b\) are not zero at the same time, the dynamics is more problematic due to the nonlinear terms make modifications the behavior of the system.
There are two approaches that can be used to describe the nature of the equilibrium points. On the one hand, their linear stability can be studied by computing the Jacobian matrix for the system (3). On the other hand, the equilibrium positions can be viewed as the critical point of the effective potential and thus, we can determine their natural. To obtain the effective potential for the problem, it is more suitable to rewrite the Hamiltonian (1) in terms of generalized velocity corresponding to the generalized coordinates instead of the conjugate momenta \(p_{1}\) and \(p_{2}\). Consequently, we have
The effective potential \(U\) is given by
Let us now start with the second approach as it also gives information about the trapping and the escape dynamics. Consequently, we can formulate the following theorem:
Theorem 3
For the Armbruster Guckenheimer Kim Hamiltonian (1) in rotating reference frame:
-
(i)
\(E_{1}\) is a minimum of the effective potential if \(\omega <1\) and a maximum if \(\omega >1\).
-
(ii)
The equilibrium points \(E_{2,3,4,5}\) are minimum of the effective potential if \(\omega >1\), \(a<0\), \(b<0\), maximum if \(\omega <1\), \(a>0\), \(b>0\) and saddle points if \(\ ab<0\).
-
(iii)
The equilibrium points \(E_{6,7,8,9}\) are minimum if \(\omega >1\), \(0< b<-2a\), \(a<0\), maximum if \(\omega <1\), \(-2a< b<0\), \(a>0\) and saddle points if \(b(2a+b)>0\).
Proof
The critical points for the effective potential (31) can be obtained by solving \(\frac{\partial U}{\partial x}=\frac{\partial U}{ \partial y}=0\). Notice, these equations give the same equations as in (29) and so, the critical points for the effective potential (31) are the equilibrium points that are listed in Theorem 2. Now, let us determine the character of the critical points by employing the Hessian matrix of the effective potential which is expressed as
where \(M\), \(N\) are given by
-
For \(E_{1}\), the Hessian matrix becomes
$$ \mathbf{H}_{1}=\left [ \textstyle\begin{array}{c@{\quad}c} 1-\omega^{2} & 0 \\ 0 & 1-\omega^{2} \end{array}\displaystyle \right ] , $$and therefore, the critical point \(E_{1}\) is maximum if \(\omega >1\) and minimum if \(\omega <1\).
In the following, we will take into account the conditions guaranteeing the existence of the equilibrium points as it illustrated in Theorem 2.
-
For \(E_{2,3,4,5}\), the Hessian matrix (32) reduces to
$$\begin{aligned} \begin{aligned} &\mathbf{H}_{2,3}=\left [ \textstyle\begin{array}{c@{\quad}c} -\frac{b}{a}(1-\omega^{2}) & 0 \\ 0 & -2(1-\omega^{2}) \end{array}\displaystyle \right ] , \\ &\mathbf{H}_{4,5}=\left [ \textstyle\begin{array}{c@{\quad}c} -2(1-\omega^{2}) & 0 \\ 0 & -\frac{b}{a}(1-\omega^{2}) \end{array}\displaystyle \right ] . \end{aligned} \end{aligned}$$(34)Using the two Hessian matrices \(\mathbf{H}_{2,3}\), \(\mathbf{H}_{4,5}\), we find the nature of the critical points \(E_{2,3,4,5}\) depends on the sign of \(ab\) and \(1-\omega^{2}\). If \(1>\omega \), \(a>0\) (these conditions refer to the existence of \(E_{2,3,4,5})\) and \(b>0\), the critical points are maximum, minimum if \(1<\omega \), \(a<0\) (these conditions indicate the existence of \(E_{2,3,4,5}\)), \(b<0\) and saddle points if \(ba<0\).
-
For \(E_{6,7,8,9}\), the Hessian matrix is
$$ \mathbf{H}_{6,7,8,9}=\left [ \textstyle\begin{array}{c@{\quad}c} -\frac{2a}{2a+b}(1-\omega^{2}) & -\frac{2(a+b)}{2a+b}(1-\omega^{2}) \\ -\frac{2(a+b)}{2a+b}(1-\omega^{2}) & -\frac{2a}{2a+b}(1-\omega^{2}) \end{array}\displaystyle \right ] \text{,} $$The determinant of Hessian matrix \(\mathbf{H}_{6,7,8,9}\) is \(-\frac{4b}{2a+b}\) \((1-\omega^{2})^{2}\) and thus, the critical points \(E_{6,7,8,9}\) are maximum if \(\omega <1\), \(b<0\), \(a>0\), \(2a+b>0\), minimum if \(\omega >1\), \(2a+b<0\), \(b>0\), \(a<0\) and saddle if \(b(b+2a)>0\).
□
It is evident that, in the case \(\omega =1\), no information can be deduced for the unique critical point \(E_{1}\) if \(b(b+2a)\neq 0\) due to the Hessian matrix becomes null matrix. Therefore, hereinafter, we will exclude from our consideration the case \(\omega =1\) because this situation needs a special treatment and it is out the scope of the paper.
The results that are contained in Theorems 2 and 3 are summarized and collected in Table 2. Furthermore, Fig. 1 illustrates and clarifies the character of the critical points for the effective potential (31) in the plane of the two parameters \(a\), \(b\).

Parameter plane with the bifurcation lines for the critical points of the effective potential: \(a=0\), \(b=0\), \(2a+b=0\)
4 Linear stability
It is well known that the linear stability for an equilibrium points \((x_{0}, y_{0})\) can be studied by using the eigenvalues of the Jacobian matrix associated to the Hamilton equations (3). The Jacobi matrix takes the form
where \(l_{1}\) and \(l_{2}\) are given by
It is easy to show the eigenvalues of Jacobi matrix (35) can be given by
where \(P\) and \(Q\) are given by
Indeed, the equilibrium point \((x_{0},y_{0})\) will be unstable if at least one of the corresponding eigenvalues (37) has a positive real part. On another side, this position will be stable in a linear approximation if all eigenvalues (37) are purely imaginary. Now, the stability of the equilibrium positions in each case mentioned above is investigated. Moreover, the linear stability gives the necessary condition for stability and sufficient for instability. This means, according to the theorem of Lyapunov (see, e.g., Chetaev, 1961), the equilibrium positions that are unstable in the linear approximation remain unstable when the nonlinear terms in system (3) is taken into account. On another side, the equilibrium positions that are stable in the linear approximation, in general, requires further analysis of nonlinear terms in (3).
Following Chetaev (1961), the equilibrium positions that are minimum for the effective potential (31) are stable. Therefore, we focus our attention on equilibrium positions characterizing the maximum critical points for the effective potential.
Theorem 3 provides us that the equilibrium position \(E_{1}\) is maximum critical point for the effective potential (31) if \(\omega <1 \) and the eigenvalues (37) corresponding to \(E_{1}\) are \(\pm (\omega -1)i\) and \(\pm (\omega +1)i\). Hence, \(E_{1}\) is linearly stable. For the equilibrium positions \(E_{2,3,4,5}\) that are maximum for the effective potential (31) if \(\omega <1\), \(b>0\) and \(a>0\), we have
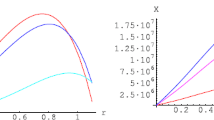
It is clear, these equilibrium points are linearly stable when all eigenvalues (37) are pure imaginary. This occurs when \(P_{1}^{2}-4Q_{1}^{2}>0\), \(P_{1}<0\) and \(Q_{1}>0\). Direct calculations give, \(P_{1}^{2}-4Q_{1}^{2}=\frac{32b}{a}(1-\omega^{2})^{2}\) and hence it is always positive since \(a>0\), \(b>0\). The inequality \(P_{1}<0\) implies \(0<\frac{b}{a}<\frac{-4+12\omega^{2}}{1-\omega^{2}}\) and thus, \(-4+12\omega^{2}\) must be positive. Therefore, we have \(\omega \in{} ]\frac{1}{\sqrt{3}},1[ \). After some manipulations, the inequality \(Q_{1}>0\) holds if \(0< b<\frac{2(1+\omega^{2})-4\omega \sqrt{2(1- \omega^{2})}}{1-\omega^{2}}a\). Thus, we can conclude the effect of the force appearing as a result of the rotation of the reference frame can act as a stabilizer for the unstable maximum equilibrium points in the present case. The boundaries of the region of the linear stability corresponding to \(E_{2,3,4,5}\) are delimited by two straight lines, in the plane \(ab\), one of them is \(b=0\) and another one is \(b=m_{1}( \omega )a\), where \(m_{1}(\omega )=\frac{2(1+\omega^{2})-4\omega \sqrt{2(1- \omega^{2})}}{1-\omega^{2}}\) represents the slop of the second straight line and it is a function of \(\omega \). Consequently, when the value of \(\omega \) increase (decrease), the size of region of linear stability increase (decrease) and this is clarified in Fig. 2. Moreover, when \(\omega \) is closed to 1, the region of linear stability cover the whole region where \(E_{2,3,4,5}\) are maximum see Fig. 2(c) while when \(\omega \) tends to \(\frac{1}{ \sqrt{3}}\), the region of linear stability is empty.

The regions of linear stability corresponding to the equilibrium positions \(E_{2,3,4,5}\) in the plane of the two parameters \(a\), \(b\)
In a similar way, we can prove the maximum equilibrium points \(E_{6,7,8,9}\) are linear stable if \(\omega \in{} ]\frac{1}{\sqrt{3}},1[\), \(\frac{\omega^{2}(3-4\omega ^{2})+\omega (1-\omega^{2})\sqrt{2(1-\omega^{2})}-1}{2\omega^{4}-2 \omega^{2}+1}a< b\), \(b>-2a\). Thus, the boundaries of the region of linear stability for those equilibrium points are delimited by the straight lines in the plane \(ab\). They are \(b=-2a\) and the another one is \(b=m_{2}(\omega )a\), where \(m_{2}(\omega )=\frac{\omega^{2}(3-4\omega^{2})+ \omega (1-\omega^{2})\sqrt{2(1-\omega^{2})}-1}{2\omega^{4}-2\omega^{2}+1}\) represents the slop of this line. It is evident the size of the region of linear stability depend on \(\omega \) due to the slop of the second line is a function of \(\omega \). It is more important to note if \(\omega \) increases (decreases) the size of region of linear stability corresponding to the maximum equilibrium points \(E_{6,7,8,9}\) increase(decrease). This is clarified in Fig. 3. Moreover, when the value of \(\omega \) tends to 1, the region of linear stability cover the whole region where those maximum equilibrium points exist and this is illustrated in Fig. 3(c). On the contrary, if \(\omega \) tends to \(\frac{1}{\sqrt{3}}\) the region of linear stability is empty. These results can be stated as the following:

The regions of linear stability corresponding to the equilibrium positions \(E_{6,7,8,9}\) in the plane of the two parameters \(a\), \(b\)
Theorem 4
\(E_{1}\) is linear stable maximum if and only if \(\omega <1\), \(E_{2,3,4,5}\) are linear stable maximum if only and only if \(\omega \in{} ]\frac{1}{\sqrt{3}},1[\), \(0< b<\frac{2(1+\omega^{2})-4\omega \sqrt{2(1- \omega^{2})}}{1-\omega^{2}}\) and \(E_{6,7,8,9}\) are also linear stable maximum if only and only if \(\omega \in{} ]\frac{1}{\sqrt{3}},1[\), \(\frac{\omega^{2}(3-4\omega^{2})+\omega (1-\omega^{2})\sqrt{2(1- \omega^{2})}-1}{2\omega^{4}-2\omega^{2}+1}a< b\), \(b>-2a\).
5 Periodic solution
Lyapunov (1956) presented a theorem that can be employed to construct periodic solutions about the equilibrium point of certain mechanical system. This theorem was previously applied in many problems see, e.g., Yehia (1977), El-Sabaa (1992). In the present section, we will apply this theorem to study the presence of the periodic solutions near the equilibrium points for the present problem. The equations of motion for the present problem can be expressed as
where \(U\) is the effective potential (31). These equations admit the Jacobi integral
Moreover, we assume the equilibrium points are \((x_{0},y_{0})\) which satisfy
where \(h_{0}\) is the value of the Jacobi integral (41) corresponding to the equilibrium points \((x_{0},~y_{0})\). It is evident that the first two equations in (42) characterize the equilibrium points. Let us put \(\ x=x_{0}+\xi ,~y=y_{0}+\eta \) in the equation (40), we obtain after some manipulations
where \(\alpha =U_{xy}(x_{0},y_{0})\), \(\beta =U_{xx}(x_{0},y_{0})\), \(\delta =U_{yy}(x_{0},y_{0})\). Performing the time transformation
to (40), we get
where \(\nu \) is an arbitrary parameter. We construct the periodic solutions of system (45) utilizing the Lyapunov theorem on holomorphic integral (Lyapunov 1956), and obtain them in the form of series in powers of the parameter \(\varepsilon \) which in the present case depend on \(h\). The solution sought becomes zero when \(\varepsilon =0\) and then \(h=h_{0}\). Let us assume
where \(h_{i}\) are constants while \(x_{i}\), \(y_{i}\) are \(T\)-periodic functions of \(t\) with period \(\nu \) that can be expressed as
Inserting the expressions (46) and (47) in (45) and taking into account the first approximation, we have
To achieve our aim, we seek solutions for (48) in the form
where \(a_{i}\) and \(b_{i}\) are free parameters. Inserting the expressions (49) in (48), we obtain the following
where \(A\) and \(B\) are free parameters while \(\nu_{0}\) is the frequency and it is given by
Now, let us classify the different values of the frequencies depending on the values of \(\omega \), \(\beta \), \(\delta \), \(\alpha \):
-
If \(\beta \delta -\alpha^{2}=U_{xx}(x_{0},y_{0})U_{yy}(x_{0},y_{0})-U _{xy}^{2}(x_{0},y_{0})>0\) (this means the effective potential has an extremal value at \((x_{0},y_{0})\)), we have two different frequencies when the inequality
$$ \omega^{2}>\frac{1}{4}\bigl[2\sqrt{\beta \delta - \alpha^{2}}-\beta - \delta \bigr] $$(52)holds. Consequently, each value of those frequencies corresponds to a family of periodic solutions relying on the parameter \(\varepsilon \). The condition (52) represents the condition for the stability of the equilibrium points \((x_{0},y_{0})\) as a result of the effective potential (31) has \((x_{0},y_{0})\) as minimum critical point.
-
If \(\beta \delta -\alpha^{2}=U_{xx}(x_{0},y_{0})U_{yy}(x_{0},y_{0})-U _{xy}^{2}(x_{0},y_{0})<0\), this indicates the point \((x_{0}, y_{0})\) represents a saddle point for effective potential (31). And so, there is a single one frequency obtained by the formula (51) with the plus sign.
Hence, there are two periodic solutions about the stable equilibrium point while there is one periodic solution near the equilibrium point characterizing a saddle point for the effective potential (31)
6 Permitted region of motion
The phase space of this problem is four dimensional due to it has two degrees of freedom. Taking into account the integral \(I_{1}:=H=h\), where \(H\) is given by (30), we can restrict our consideration to study the flow on the hypersurface
The projection of \(\varGamma_{h}\) on the position plane \((x,y)\) is the permitted region of motion and it is also called Hill’s region. Consequently, the region of possible motions is specified by
Notice that the curve \(h-\frac{1}{2}(1-\omega^{2})(x^{2}+y^{2})+ \frac{a}{4}(x^{2}+y^{2})^{2}+\frac{b}{2}x^{2}y^{2}=0\) which separates the position plane \((x,~y)\) into regions and it is named as zero velocity curve (ZVC). It is obvious that the radius of \(S^{1}\) in the first part of \(\varGamma_{h}\) is given by
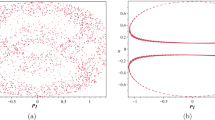
and also note that \(\varGamma_{h}\) is compact. It is evident when \(h>0\), \(\omega >1\), \(a>0\), \(b>0\), the permitted region of motion covers the whole position plane \((x,y)\). On the contrary, if \(h<0\), \(\omega <1\), \(a<0\), \(b<0\), the permitted region of motion is empty. The topological type of \(\varGamma_{h}\) varies only at the critical points of the Hamiltonian (see Milnor, 1970, Theorem 3.1, p. 12). Figure 4 illustrates different Hill’s regions for different values of the parameters \(h\), \(a\), \(\omega\) and \(b\). It is more suitable to note that the trajectories of the motion exist in these regions of possible motions.

Hill’s region for different values of the parameters \(\omega \), \(b\), \(a\) and \(h\), where shading are possible region of motion and the solid lines are the ZVCs
7 Conclusion
In the present paper, we have studied the dynamics of Armbruster Guckenheimer Kim galactic potential in a rotating reference frame. This problem has been proved to be non-integrable if \(\frac{b}{a}\in{} ] \frac{18}{7}, \infty {}[ \) using Painlevé analysis. Furthermore, we have pointed out it has Painlevé property in a non-rotating reference frame with certain conditions on the two parameters \(a\), \(b\) for which the separation of variable can be performed. The equilibrium points which also represent the critical points for the effective potential have been found. The stability of these equilibrium points has been studied and we have also proved the force appearing due to the rotation of a reference frame can be considered a stabilizer for maximum equilibrium points. In other words, the stabilization happens for certain value of the angular velocity \(\omega \) satisfying the condition \(\omega \in {}]\frac{1}{\sqrt{3}},1[\). The regions of linear stability have been graphically clarified in Figs. 2 and 3 and we have also illustrated that the size of the regions of linear stability becomes large or small depending on the value of the angular velocity is large or small, respectively. We have used the Jacobi integral to determine the permitted regions of motion. Finally, we have utilized the Lyapunov theorem (Lyapunov 1956) to construct the periodic solutions near the equilibrium points. Moreover, we have shown there are two periodic solutions near the stable equilibrium point and only one periodic solution near the saddle point of the effective potential of the problem.
References
Ablowitz, M.J., Ramani, A., Segur, H.: A connection between non-linear evaluation equations and ordinary differential equations of P-type. J. Math. Phys. 21, 715–721 (1980)
Abraham, R., Marsden, J.E.: Foundation of Mechanics. Benjamin, Reading (1978)
Alfaro, F., Llibre, J., Pérez-Chavela, E., Alfaro, F.: Periodic orbits for a class of galactic potentials. Astrophys. Space Sci. 344, 39–44 (2013)
Armbruster, D., Guckenheimer, J., Kim, S.: Chaotic dynamics in systems with square symmetry. Phys. Lett. A 140, 416–420 (1989)
Arnold, V.I., Kozlov, V., Neishtadt, A.: Dynamical system III. In: Mathematical Aspects of Classical and Celestial Mechanics, 3rd edn. Encyclopedia of Mathematical Science Springer, Berlin (2006)
Bertola, F., Capaccioli, M.: Dynamics of early type galaxies, I: the rotation curve of the elliptical galaxy NGC 4697. Astrophys. J. 200, 439–445 (1975)
Bounits, T., Segur, H., Vivaldi, F.: Integrable Hamiltonian systems and the Painlevé property. Phys. Rev. A 25, 1257–1264 (1982)
Bountis, T.: Investigating non-integrability and chaos in complex time. Physica D 86, 256–267 (1995)
Calzeta, E., Hasi, C.E.: Chaotic Friedmann-Roberston-Walker cosmology. Class. Quantum Gravity 10, 1825–1841 (1993)
Caranicolas, N.D.: A mapping for the study of the 1:1 resonance in a galactic type Hamiltonian. Celest. Mech. Dyn. Astron. 47, 87–96 (1989)
Caranicolas, N.D.: Exact periodic orbits and chaos in polynomial potentials. Astrophys. Space Sci. 167, 305–313 (1990a)
Caranicolas, N.D.: Global stochastically in a time-dependent galactic model. Astron. Astrophys. 227, 54–60 (1990b)
Caranicolas, N.D.: The structure of motion in a 4-component galaxy mass model. Astrophys. Space Sci. 246, 15–28 (1996)
Caranicolas, N.D.: Maps describing motion in strong bars. New Astron. 7, 397–402 (2000)
Caranicolas, N.D.: From global dynamical models to the Hènon-Heiles potential. Mech. Res. Commun. 29, 291–298 (2002)
Caranicolas, N., Barbanis, B.: Periodic orbits in nearly axisymmetric stellar systems. Astron. Astrophys. 114, 360–366 (1982)
Caranicolas, N.D., Innanen, K.A.: Chaos in a galaxy model with nucleus and bulge components. Astron. J. 102, 1343–1347 (1991)
Carlbeg, R.G., Innanen, K.A.: Galactic chaos and the circular at the sun. Astron. J. 94, 666–670 (1987)
Chetaev, N.G.: The Stability of Motion. Pergamon, New York (1961)
Contopoulos, G.: Order and Chaos in Dynamical Astronomy. Springer, Berlin (2002)
El-Sabaa, F.M.: About the periodic solutions of a rigid body in a central Newtonian field. Celest. Mech. Dyn. Astron. 55, 323–330 (1992)
Elipe, A., Miller, B., Vallejo, M.: Bifurcations in a non-symmetric cubic potential. Astron. Astrophys. 300, 722–725 (1995)
Habib, S., Kandrup, H.E., Mehon, M.E.: Chaos and noise in galactic potentials. Astron. J. 480, 155–166 (1997)
Illingworth, G.: Rotation in 13 elliptical galaxies. Astrophys. J. 218, 43–47 (1977)
Innanen, K.A.: The threshold of chaos for Henon-Heiles and related potentials. Astron. J. 90, 2377–2380 (1985)
Kandrup, H.E.: Energy relaxation in galaxies induced by an external environment and/or incoherent internal pulsations. Mon. Not. R. Astron. Soc. 323, 681–687 (2001)
Kandrup, H.E., Novotny, S.J.: Phase mixing in unperturbed and perturbed Hamiltonian systems. Celest. Mech. Dyn. Astron. 88, 1–35 (2004)
Karanis, G.I., Caranicolas, N.D.: Transition from regular motion to chaos in a logarithmic potential. Astron. Astrophys. 367, 443–448 (2001)
Llibre, J.: Averaging theory and limit cycles for quadratic systems. Rad. Math. 11, 215–228 (2002)
Llibre, J., Makhlouf, A.: Periodic orbits of the generalized Friedmann-Robertson-Walker Hamiltonian systems. Astrophys. Space Sci. 344, 45–50 (2013)
Llibre, J., Roberto, L.: Periodic orbits and non-integrability of Armbruster-Guckenheimer-Kim potential. Astrophys. Space Sci. 343, 69–74 (2013)
Llibre, J., Vidal, C.: Periodic orbits and non-integrability in a cosmological scalar field. J. Math. Phys. 53, 012702 (2012)
Llibre, J., Vidal, C.: New 1:1:1 periodic solution in 3-dimensional galactic-type Hamiltonian systems. Nonlinear Dyn. 78, 968–980 (2014)
Llibre, J., Paşca, D., Valls, C.: Periodic solutions of a galactic potential. Chaos Solitons Fractals 61, 38–43 (2014)
Lyapunov, A.M.: General Problem of Stability of Motion. Collected Works, vol. 2. Izd. Akad. Nauk SSSR, Moscow (1956)
Milnor, J.: Morse Theory. Annals of Mathematics Studies, vol. 51. Princeton Univ. Press, New Jersey (1970)
Pucacco, G., Boccaletti, D., Belmonte, C.: Quantitative predictions with detuned normal forms. Celest. Mech. Dyn. Astron. 102, 163–176 (2008)
Saito, N., Ichimura, A. In: Casati, Ford, J. (eds.) Stochastic Behaviour in Classical and Quantum Hamiltonian Systems. Springer, Berlin (1979)
Tabor, M.: Chaos and Integrability in Nonlinear Dynamics. Wiley, New York (1988)
Yehia, H.M.: On periodic, almost stationary motions of a rigid body about a fixed point. J. Appl. Math. Mech. 41, 556–558 (1977)
Zeeuw, T., Merritt, D.: Stellar orbits in a triaxial galaxy, I: orbits in the plane of rotation. Astrophys. J. 267, 571–595 (1983)
Acknowledgements
The author is very thankful to Professor Hamad M. Yehia for advising and his useful comments through my work on this article.
Author information
Authors and Affiliations
Corresponding author
Appendix A: Painlevé analysis
Appendix A: Painlevé analysis
The Painlevé property is based on the fact that the system of non-linear ordinary differential equations has singularities in the complex domain which are not detected from a direct inspection. These singularities depend on the initial conditions are named as movable singularities. The so-called Painlevé property conjectures that a system of differential equations is integrable when all these singularities are simple poles. This remarkable observation was first pointed out by the famous mathematician Sophia Kowalevski. She was able to approach the problem of a rigid body rotating around a fixed point finding out a new solution. Ablowitz et al. (1980) announced an algorithm (coined as ARS) capable of detecting particular cases satisfying the Painlevé property. This approach has been used to determine whether a non-linear system is integrable or not in a very systematic way (see, e.g., Bounits et al., 1982; Tabor, 1988; Bountis, 1995). Let us now briefly give the ARS algorithm.
1.1 ARS algorithm
Consider a system of ordinary differential equations of the form
where \(G_{i}\) are rational in the variables \(x_{i}\) and analytic in \(t\). The dynamical system is called of Painlevé type if all movable singularities of its solution is poles. Indeed, if the solution in the neighborhood of an arbitrary singularity \(t_{0}\) can be written as \((t-t_{0})^{p}\) where \(p\) is an integer determined from the leading order, the movable algebraic or logarithmic branch points as well as essential singularities are excluded. Thus, the necessary condition for the ODEs (A.1) possesses Painlevé property is that its solution can be expressed as a pure Laurent series with \(n-1\) arbitrary coefficients. This analysis can be preformed in three steps. They are:
1. Dominant behaviors
In this step, we seek to find the leading order behaviors of \(x_{i}\) in the form \(x_{i}=\alpha_{i}\tau^{p_{i}}\), where \(\tau =t-t _{0}\) and \(\alpha_{i}=\)constants. If all \(p_{i}\) are negative integer, the solution may corresponds to generic Laurent series. On another side, if any of \(p_{i}\) is a rational with special type, we will deal with weak Painlevé. In both cases the solution can be expressed in the form of Laurent series
where \(b_{ik}\) is constants.
2. Resonances
In this step we find the resonances which are defined as the value of the power at which arbitrary constants enter in the expansion of the solution near the singularity \(t_{0}\). We initiate by taking only into account the leading terms in the original equations, inserting
in (A.1) and collecting the linear terms in \(\sigma_{i}\) which we write as
where \(Q(r)\) is \(n\times n\) matrix. In order some of \(\sigma_{i}\) be arbitrary, the matrix \(Q(r)\) must be singular matrix i.e.,
Notice, \(r=-1\) must be a root for (A.5) and it indicates to the free location of the singularity \(t_{0}\). Moreover, any negative resonance will be ignored.
3. Constant of integration
In this step we investigate the existence of non-dominate logarithmic branch points. To preform this, we insert the following expression into the full system (A.1)
where \(r_{s}\) is the largest positive root of (A.5). At the resonance, one usually finds conditions named compatibility conditions that have to be satisfied in order to ensure the arbitrariness of the coefficients.
Finally, if the problem under consideration is of Painlevé type, the complete set of first integrals of motion must be constructed to insurance the integrability.
Rights and permissions
About this article

Cite this article
Elmandouh, A.A. On the dynamics of Armbruster Guckenheimer Kim galactic potential in a rotating reference frame. Astrophys Space Sci 361, 182 (2016). https://doi.org/10.1007/s10509-016-2770-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10509-016-2770-8