
Abstract
This paper provides a review of the consensus problem as one of the most challenging issues in the distributed control of the multi-agent systems (MASs). In this survey, firstly, the consensus algorithms for the agents with the single-integrator, double-integrator and high-order dynamic models were collected from various research works, and the convergence condition for each of these algorithms was explained. Secondly, all the consensus-related problems such as those in the sampled-data consensus, quantized consensus, random-network consensus, leader–follower consensus, finite-time consensus, bipartite consensus, group consensus/cluster consensus, and the scaled consensus were analyzed and compared with each other. Thirdly, we focused on the common control techniques used for the consensus problems in the presence of disturbance and divided all these control methods into two categories: robust control and adaptive control. Finally, we reviewed the most prevalent consensus applications in the MASs, including the subjects of rendezvous, formation control, axial alignment and the wireless sensor networks.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Multi-agent system (MAS) or distributed artificial intelligence is an approach in which groups of agents work together to accomplish a mission or perform a task. Usually, the kinds of duties assigned to MASs are those that cannot be accomplished by a single agent, or they are such that the cost and the difficulty of employing a single complex agent for performing them are greater than using groups of simpler agents (Zhu et al. 2012). In order to perform the assigned missions accurately and successfully, the agents have to communicate, cooperate and coordinate with one another, and engage in bilateral negotiations; exactly like the daily interactions of human beings in a society. The main idea of MASs was originally inspired by the biological behaviors of animals in nature; such as the movement and migration patterns of fish, birds, etc. (Partridge 1984).
By using a MAS instead of a single-agent one, the following advantages are gained: (1) complicated and dangerous missions can be undertaken, (2) cost of performing a task can be reduced, (3) parallel processing can be implemented, (4) stability can be achieved and error reduced, (5) a MAS is scalable, and most importantly, (6) since no single element is responsible for thinking and decision-making in a MAS (in other words, decision-making is distributed), the system can continue functioning even if a part of it is disabled. Selecting a control architecture for a MAS depends on the abilities of each agent for group work and also on the performance of the whole system. The control architectures for MASs can be divided into three groups: reactive, deliberative, and hybrid (Ismail and Sariff 2018; Olfati-Saber 2006).
Reactive control, which is also known as decentralized control, is founded on the notion of perception-reaction, in which each agent surveys its surrounding environment via its sensors and, based on the gathered information, cooperates with other agents. For interacting with other agents, high-level communication is not necessary. Glorennec (Glorennec 1996) has described the collaboration between agents with fuzzy logic techniques, for the purpose of obstacle avoidance.
Consensus means the interaction between groups of agents in a team, via sensors or a communication network, to reach an agreement on a common value or state (Olfati-Saber and Shamma 2005; Schenato and Gamba 2007; Olfati-Saber et al. 2006). In the last decade, the subject of consensus in MASs has been investigated and explored by numerous researchers. The theoretical studies on the subject of consensus can be divided into three categories. In the first category, mainly, the biological mechanisms of wildlife have been simulated and the collective behaviors of animals in nature have been modeled. In 1987, inspired by the flocking behaviors of birds, fishes and other types of fauna in nature, Reynolds (Reynolds 1987) presented his computer model, known as Boid. Based on the Boid model, Vicsek et al. (1995) proposed a minimal model that described the phase transition of self-driven particles by a novel type of dynamics. The second group of studies is focused on the preliminary stages of theoretical research. Jadbabaie et al. (2003) applied graph and matrix theories to present a theoretical description of consensus in the Vicsek model. The properties of the Laplacian matrix were used to analyze the problem of consensus in first-order MASs in 2004 (Olfati-Saber and Murray 2004). Also, the relationship between algebraic graph connection, convergence rate, and maximum threshold of time-delay tolerance in consensus problems was investigated. Ren and Beard (2005) explored the subject of consensus in second-order MASs and highlighted the importance of the topology of interaction between agents, including the directed spanning tree, for attaining asymptotic agreement. By introducing the Laplacian matrix, consensus problems have entered the theoretical analysis phase (Li and Tan 2019) and since then, the graph theory has become an important tool for the theoretical analysis of consensus problems. The third category of studies is concerned with the analysis of consensus models, designing consensus protocols, and the subjects of convergence, equilibrium and various applications of consensus.
In this paper, we have conducted a survey of consensus topics and reviewed the research activities on the following types of consensus: sampled-data consensus, quantized consensus, consensus in random networks, leader–follower consensus, finite-time consensus, bipartite consensus, group consensus/cluster consensus, and scaled consensus.
The preliminaries of consensus, such as the graph theory and the matrix theory, have been described in Sect. 2. The dynamic models and the protocols of consensus have been fully described in Sect. 3. The issues related to consensus and its control aspects have been explored in Sects. 4 and 5, respectively. The applications of consensus have been reviewed in Sect. 6, and the conclusion has been presented in Sect. 7.
2 Preliminaries
A graph comprises a set of non-empty vertices (nodes) and a set of edges. A graph is represented by the notation \(G = (V,E)\), where \(V\) indicates a set of vertices and \(E\) denotes a set of edges. Graphs are used to model the interrelationship between the agents in a MAS (West 1996; Bollobás 2013; Bondy and Murty 1976). In this regard, each vertex stands for an agent and each edge represents the relationship and the interaction between two agents. Therefore, for a MAS consisting of n agents, the corresponding graph (directed or undirected) will be in the form of \(G = (V,E)\), where \(V = \{ 1,2,3,...,n\}\) and \(E \subseteq V \times V\). An edge represented as \((i,j) \in E\) means that agent j has a relationship with and access to agent i and can receive information from i and interact with it; it also means that agent i is a neighbor for agent j. The set of neighbors of apex i can be represented as follows:
For any arbitrary graph, the number of edges \(l\) is indicated by the set of \(l = \{ 1,...,n(n - 1)/2\}\). Graph G is called a complete graph when each vertex in it is connected to every other vertex via an edge. Thus, the number of edges is equal to \(l = n(n - 1)/2\) and, by convention, it is represented as \(K_{n}\). The neighborhood matrix of \(A = [a_{ij} ] \in R^{n \times n}\) for graph \(G = (V,E)\) is defined as (Anderson and Morley 1985):
By using Eq. (2), we express the Laplacian matrix of \(L = [\ell_{ij} ] \in R^{n \times n}\), where
The Laplacian matrix is a symmetric matrix, and it satisfies the following condition:
3 Consensus dynamics
Information exchange is an integral part of MASs; especially, when consensus is involved. During an exchange of information, each agent updates the state of its current information based on the information it receives from its neighbors. Before introducing the consensus algorithms and protocols, it is necessary to model each agent of a MAS by means of dynamic structures and to present a specific consensus algorithm for that agent. For this purpose, based on the type of application and the required precision considered for a consensus problem, different models such as the single-integrator model, double-integrator model and the high-order model can be used (Hu 2012). In all the presented models, the considered MAS is assumed to include n agents. Each agent is assumed to be equivalent to a node, and the connection between any two nodes is considered as an edge. The relevant relations in each of these models have been stated and explained in the following subsections.
3.1 The single-integrator dynamic model
This model is the simplest model for describing the movement of agents and it is the simplified form of the kinematic model for omnidirectional mobile robots (with Swedish wheels (Campion et al. 1996). This model has been extensively employed in the cooperative control problems related to MASs (e.g., consensus and formation control). It only uses two variables of velocity and position, with the following relationship between them (Campion et al. 1996; Adibzadeh et al. 2020):
where \(q_{i}\) denotes the position of mobile robot \(i\) and \(u_{i}\) indicates its control input velocity. In practice, the position and the velocity of each agent are determined by means of complementary filter (Euston et al. 2008). For example, in Dong et al. (2016), the position and the velocity of each quadrotor are obtained based on GPS sensors and accelerometers, and these data are exchanged with neighboring agents via the Zigbee network.
These systems are called single-integrator, because their transfer function expressed in the Laplace domain is in the following form, and its input and output are separated from each other by a single-integrator function (Ren et al. 2008).
For this dynamic model, we consider the following consensus algorithm (Queiroz et al. 2019):
where \(a_{ij}\) is the \((i,j)\) entry in the weighted neighborhood matrix. By combining Eqs. (5) and (7), the following matrix form can be obtained:
where \(q = [q_{1}^{T} ,...,q_{2}^{T} ]^{T}\), \(L_{n} (t) \in R^{n \times n}\) is the asymmetric Laplacian matrix at time \(t\), and \(\otimes\) indicates the Kronecker product.
Consensus will be achieved and converged when, for all the initial information states (i.e., \(q_{i} (0)\)) and for all values of \(i,j = 1,2,...,n\), the following condition holds:
3.2 The double-integrator dynamic model
The motion equations of some vehicles are modeled with double-integrator dynamic models. Contrary to the consensus problems in the single-integrator dynamic model, in which all the information states converge to constant and identical values, sometimes we need to get some information states converge to one constant value and the remaining information states to another constant value; in this case, we have to use double-integrator dynamic models. It should be mentioned that the extension of consensus algorithm from the single-integrator dynamic model to the double-integrator dynamic model will be nontrivial (Ferrari-Trecate et al. 2009). The double-integrator model is one of the simplest dynamic models for omnidirectional mobile robots, and its equations of motion are as follows:
where, \(q_{i}\) is the information state of agent \(i\), \(v_{i}\) is the first derivative of the information state of agent \(i\), and \(u_{i}\) is its control input acceleration. In a special case, if the information state of each agent is assumed as its spatial position, then the double-integrator dynamic model will consider that agent as a point mass and assign an acceleration to it. Also, \(q_{i}\), \(v_{i}\) and \(u_{i}\) will be the position, velocity and acceleration control inputs of agent \(i\), respectively.
The transfer function of the above system in the Laplace domain is \(G_{i} (s) = \frac{1}{{s^{2} }}I_{m}\), and it has an additional integrator relative to the former model; which justifies its designation (Ren and Atkins 2007; Zhu et al. 2009; Ren et al. 2007a). Ever since the advent of control theory, the double-integrator control system has attracted a great deal of attention and is now a symbol of the controllers that achieve minimum execution time and minimum fuel consumption (Xie and Wang 2007).
The consensus algorithm for this dynamic model is expressed as (Ren and Beard 2008a)
where \(a_{ij}\) is the \((i,j)\) entry in the weighted neighborhood matrix, and \(\gamma\) is the value of positive gain.
Consensus will be achieved and converged when, for all the initial information states (i.e., \(q_{i} (0)\)) and their first derivative (i.e., \(v_{i} (0)\)) and for all values of \(i,j = 1,2,...,n\), the following conditions hold:
3.3 The high-order dynamic model
Contrary to the abovementioned dynamic models, all of which were simple linear models, in this section, the modeling of system agents by nonlinear kinematics and dynamics has been addressed. Actually, there are many systems (e.g., the dynamics of helicopters and car-like robots) that cannot be modeled via first-order kinematics and double-integrator dynamics. Compared to the previous models, the transfer function of these systems, in the Laplace domain, will be of higher orders (Ren et al. 2006, 2007b).
Consider the following information states with the \(l\) th-order dynamics as
where \(x_{i}^{(k)} \in R,k \in \{ 0,1,...,l - 1\}\) is the kth-order state vector for agent \(i\), \(u_{i}\) is the control input, and \(x_{i}^{(k)}\) is the kth derivative of \(x_{i}\). For the above dynamic model, a consensus algorithm is considered as (He and Cao 2011)
where \(k_{ij} > 0,\gamma_{k} ,g_{ii} \equiv 0\), and \(g_{ij}\) indicates the direction of information transmission between agents. If information is transmitted from agent j to agent i, \(g_{ij}\) will have a value of 1; otherwise it will be zero.
Consensus will be achieved among all n agents, and they will agree over a specific state value, when the following relation is established (Xiao and Wang 2007):
High-order dynamic model is an extension of the single-integrator and double-integrator dynamic models. For example, by inserting the values of \(l = 1\) and \(l = 2\) into the equations of this section, the equations of the single-integrator and double-integrator dynamic models will be obtained, respectively.
By combining Eqs. (14) and (15), the following matrix form can be obtained (Zuo et al. 2017):
where \(\Gamma = \left[ {\begin{array}{*{20}c} {0_{n} } & {I_{n} } & {0_{n} } & \cdots & {0_{n} } \\ {0_{n} } & {0_{n} } & {I_{n} } & \cdots & {0_{n} } \\ \vdots & \vdots & \vdots & \vdots & \vdots \\ {0_{n} } & {0_{n} } & {0_{n} } & \cdots & {I_{n} } \\ { - \gamma_{0} L} & { - \gamma_{1} L} & { - \gamma_{2} L} & \cdots & { - \gamma_{L - 1} L} \\ \end{array} } \right]\) and also \(L = [l_{ij} ]\), in which \(l_{ii} = \sum\nolimits_{j \ne i} {g_{ij} k_{ij} }\) and \(l_{ii} = - g_{ij} k_{ij} ,\forall i \ne j\).
The consensus algorithms and models developed during 1987–2007 have been listed in Table 1.
4 Consensus topologies
In this section, we reviewe the consensus-related subjects and problems investigated in recent years. Figures 1 and 2 show the number of papers written between the years of 2000–2020 about various types of consensus, such as sampled-data consensus, quantized consensus, consensus in random networks, leader–follower consensus, finite-time consensus, bipartite consensus, group consensus/cluster consensus, and scaled consensus in Google Scholar and Scopus, respectively.

Source: scientific papers with mentioned keywords on MASs field indexed by Google Scholar until August 2020
Comparing the fractions of research works conducted on different types of consensus in MASs in the last two decades.

Source: scientific papers with mentioned keywords on MASs field indexed by Scopus
Comparing the fractions of research works conducted on different types of consensus in MASs in the last two decades.
4.1 Sampled-data consensus
In general, the goal of consensus is to design appropriate protocols in the presence of communication restrictions and switching network topologies (Li et al. 2014). In the majority of early research works conducted on the subject of consensus, it has been assumed that agents are able to exchange their information via communication channels of unlimited capacity. However, the reality is something else; and the communication channels can only transmit a limited quantity of data bits (Li et al. 2014). To solve this problem, it is usually assumed that 1) the agents in a MAS only communicate with their neighbors, and 2) the information about the states of the agents is only conveyed at specific time instances. On this basis, if, at any instance, all the agents attempt to transmit their state-related information simultaneously, the sampling will be called the “synchronous sampling”. Also, when, at any instance, each agent receives the state-related information from just a few of its neighbors, the sampling will be called the “asynchronous sampling”.
Qin et al. (2010) studied the sampled-data consensus problem for MASs with double-integrator dynamics and under fixed and dynamic network topologies. Contrary to most former research works, which are based on the spectral analysis of system matrix, in this paper, they presented a novel graphical method for illustrating network topologies and the associated digraph of the transformed system matrix. Their scheme also provides a better intuition for understanding the second-order consensus algorithm.
The problem of sampled-data consensus in MASs with time-varying characteristics was recently explored and, later on, by employing the decoupling method, the considered consensus problem was turned into a simultaneous stability problem in linear time-varying sampled-data systems (Zhang et al. 2020).
Sun et al. (2020) have recently investigated the sampled-data consensus of MASs with switching jointly connected topologies. Contrary to other works on this subject, which consider no positive real part eigenvalues for system matrixes, their proposed method does not include such an assumption. Also, they have used the time-varying Lyapunov function approach to describe the state characteristics of agents.
In the cited cases and in most of the research works published so far, the control signals have been considered as piecewise constant signals. Recently, a novel algorithm has been employed in Barkai et al. (2021) to investigate the consensus problem for the time-varying topologies under the spatial and temporal communication constraints. This algorithm is based on the emulating technique, and the authors have demonstrated that by using the analog architecture, the complexity of the controllers can be reduced to a large extent. A summary of the research works conducted on the sampled-data consensus has been presented in Table 2.
4.2 Quantized consensus
Due to the bandwidth constraints in the communication between agents, data should not only be sampled, but also quantized before they are transmitted (Chen et al. 2013).
Ma et al. (2018) studied the quantized consensus in continuous-time general linear MASs. By employing an input-to-state stability Lyapunov function, he developed a distributed protocol and solved the quantized consensus problem for the considered system. It should be mentioned that the above distributed protocol includes a state estimator and a dynamic quantizer, and it has been designed by means of sampled and quantized data (according to Fig. 4). Also, a quantized distributed load balancing scheme, subjected to maximum load capacity constraint, has been presented in Gravelle and Martínez (2014) for the purpose of converging to the desired state.
In general, the efforts of different research works to develop quantized consensus algorithms can be divided into two sections (Censi and Murray 2009):
-
Communication section
Load balancing is one of the subjects brought up in this section. The basic notion of load balancing is to achieve proper distribution of task over the agents (Kashyap et al. 2007). In this respect, communication bottlenecks can occur at three different locations: (a) at a sender, (b) at a receiver, and (c) in the network. Fig. 3 shows the different cases of communication bottlenecks (Chowdhury et al. 2011).
Fig. 3 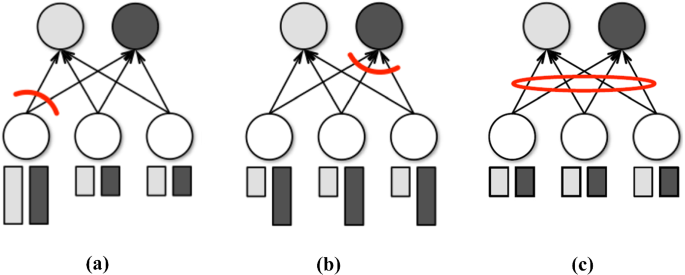
Communication bottlenecks can occur at three different locations: a at a sender, b at a receiver, and c in the network (Chowdhury et al. 2011)
Based on the capabilities of agents, Kashyap et al. (Kashyap et al. 2007) divided the load balancing algorithms into two classes: dimension exchange, and diffusion; which respectively indicate the ability of exchanging data with one neighboring agent or all neighboring agents. Also, by considering a group of distributed averaging algorithms they termed “quantized gossip algorithms”, they presented load-balancing algorithms based on local information, and verified the convergence of these algorithms by using the concepts of the Markov-chain theory.
The consensus problem for linear and Lipschitz nonlinear MASs with quantized communication between agents was investigated in Zhang et al. (2016). In this work, for reducing the communication load, an event-triggered control strategy was proposed for linear MASs.
-
Updating section
Reaching consensus in MASs with communication constraints by means of a connected weighted graph has been explored in Lavaei and Murray (2011). In this work, the communication between agents has been considered as random, and also it has been assumed that in every round of updating, only one pair of agents update their states. In this updating process, each time, one edge of the weighted graph is chosen, in proportion to its weight, and the values on its end apexes are updated based on the quantized data being exchanged. It has also been demonstrated that the above quantized consensus can be achieved by means of a quantized stochastic gossip algorithm.

As is observed in Fig. 4 (Ma et al. 2018), in consensus problems with communication constraints, the acts of data sampling and data quantization are dependent on each other. For example, (Chen et al. 2013) has dealt with the quantized consensus of second-order continuous-time MASs with a directed topology via sampled data and has satisfied the necessary and sufficient conditions for reaching consensus.

Using data sampling and quantization in consensus problems with communication constraints; \(x_{j} (t)\) indicates the state of agent j, \(x_{j} (t_{k}^{j} )\) denotes the state of agent j sampled with communication time sequence \(t_{k}^{j}\), \(s_{j} (k)\) is quantizer output, and \(\hat{x}_{j}^{i} (t)\) represents the estimation of the state of agent j by agent i (Ma et al. 2018)
In another research, Li et al. ( 2018) have examined the effects of quantization, sampled data and general Markov interaction links on consensus networks and with agents having continuous-time general linear dynamics.
By using a first-order recursive channel filter and employing a directed network, a dynamic quantized consensus protocol has been designed in Rong et al. 2021a. Also in this research, by assuming limited memory capacity, an increment PI-based protocol has been presented; which is a special case of the mentioned first-order recursive filter. Then, by means of the deigned protocols, the authors have provided the necessary conditions for the asymptotic consensus. An overall review of the research works on the quantized consensus can be observed in Table 3.
4.3 Consensus in random networks
Although extensive research has been conducted on the subject of consensus in definite networks, few research works exist on consensus in random networks. Fortunately, in recent years, researcher have got interested in using random variables in the consensus problem; in which the network topology or the parameters of consensus algorithm randomly vary with time. These random hypotheses have provided the best conditions for delving into practical situations in the real world. Although the subject of consensus in random networks has not been thoroughly investigated, certain areas of this field have attracted the attention of researchers in recent years. The use of randomized gossip algorithms in a network with fixed topology has been explored in Boyd et al. (2006). In this work, each agent randomly choses one of its neighboring agents, at a time, and exchanges its information with that agent only.
Consensus reaching using the random graph model of Erdos–Renyi was investigated in Erdős and Rényi (1960). In this work, two agents of a MAS could communicate with each other independently and with a fixed probability of \(p\). The results of this research were later extended to directed and weighted networks in Huang and Manton (2009). The issue of the dependency of the MASs on a specific topology has been investigated by Shang (2010). He proved that the agents in a MAS can achieve convergence by performing random walks in a directed network and discrete environment. In other words, a consensus is accomplished when the random walk of each agent is an ergodic Markov chain.
In (Tahbaz-Salehi and Jadbabaie 2008), it was shown how a problem of consensus seeking over a network can be reduced to a problem of the ergodicity of a sequence of matrixes. The achieved results provided the necessary and sufficient condition for reaching consensus in the entire random network. Interval consensus in discrete-time MASs over random networks was explored in Fu et al. (2020). Yi et al. (2014) examined the effect of random communication delays among the agents in second-order MASs and also presented a novel consensus algorithm.
Abaid and Porfiri (2010) employed a counting argument to compute a statistical state matrix for describing the distributed average process. They used the spectral properties of this matrix to obtain a closed-form expression in the consensus convergence factor and also to create the necessary and sufficient condition for getting the mean square consentability and maximizing the convergence speed of the average protocol. Then, for showing the consequences of randomly choosing the neighbors during the implementation of consensus protocol, they analyzed the factor of convergence for an nth-order fixed directed network.
4.4 Leader–follower consensus
The three major control strategies are the behavioral structure, virtual structure, and the leader–follower structure. The leader–follower structure has recently been used in consensus control. In this structure, some of the agents in a MAS are considered as leaders, and the rest of the agents act as followers. The leaders are responsible for guiding the followers, so that the whole system achieves consensus. The leaders could function autonomously, or be controlled by an external system. With just one leader agent in a system, if noise or internal disturbances arise, the leader may be disabled and, as a result, the mission of the system would be scrapped. The performance of consensus networks with just one leader agent is always improved by adding extra leaders (Consolini et al. 2008). Considering the different characteristics of leaders, the leader–follower consensus methods can be divided into real-leader and virtual-leader approaches.
The research works in the area of leader–follower consensus can be divided into two groups. The first group of studies deals with the controllability of leader–follower MASs. The second group explores the procedures and the criteria for choosing the leaders from among the agents in MASs. Leaders should be selected in such a way that the controllability, optimal performance, and the formation control of a system are guaranteed. Consensus control for leader–follower MASs with the triggering mechanisms has been presented in Zhang et al. (2021).
For optimally controlling the leaders in the MASs and getting them to reach consensus, different control strategies are used, including the prescribed performance control (PPC). For the first time in 2019, Chen and Dimarogonas (2019) presented a new approach based on the PPC for controlling the consensus in the leader–follower MASs. Contrary to the previous approaches in which the PPC law was applied to all the agents, in this research, the PPC law was applied to the leaders only. The other differentiating aspect of this research was related to the number of leaders in a MAS. Prior to this research, all the PPC-based leader–follower consensus approaches involved just one leader agent, which was considered as a reference for the other agents. By considering multiple leaders, Chen and Dimarogonas designed their control strategy such that it is able to get the whole system to consensus under the prescribed performance bounds. Another type of multi-leader strategy in a system can be found in Shang and Ye (2017). In this research, Shang studied the presence of multiple leaders in the problem of fixed-time group consensus. For this purpose, he divided a MAS into several subgroups, and for each of them, he assigned multiple leaders that could communicate with the agents in the other subgroups.
Goldin et al. (Goldin and Raisch 2010)( revealed that the controllability of an entire MAS via an external control input only depends on the controlling of follower agents by leader agents. They also obtained the necessary and sufficient conditions for controlling the follower agents. Wu et al. (2018) studied the problem of consensus tracking control for leader–follower MASs subjected to actuator faults and disorders. The stable leader–follower \(H_{\infty }\) consensus of heterogeneous MASs with denial of service (DoS) attacks was examined in Zhang and Feng (2021) by considering the severity of various attacks. Also, a new switched system model was presented for attack modeling. It was demonstrated that the problem of designing a consensus protocol can be converted into two static output feedback control (SOF) problems. It was also shown that by solving some linear matrix inequalities, and without knowing the probability of an attack, the achievements of the SOF controller can be determined.
Patterson et al. (Patterson et al. 2016) investigated the optimal selection of leaders in consensus networks under two conditions. In the first case, they assumed that the data measured by the leader agents contain noise, and that these agents do not convey consistent information; as a result, the agents are not able to keep their formation. They called this condition “noisy formation dynamics”. In the second case, they presumed that all the leader agents share the same information, and they named this condition “consensus dynamics”. In these conditions, network topology and the selection of a set of leaders determine the convergence rate of consensus. From among the leader agents in a MAS, Patterson selected a set of maximum k leaders for which the convergence rate is maximized.
Using a lower triangular model, a new method was presented in Zhang et al. (2015) for solving the leader–follower consensus problem in time-varying MASs with homogeneous agents. The leader–follower coordination and consensus protocols over a random switching network were studied in He et al. (2016) by considering numerical constraints. In this work, the leader agents have dynamic states and reach consensus only by interacting among themselves, while the followers interact with the leaders and with the other agents. Table 4 has summarized the research works surveyed in this section along with the extra details.
4.5 Finite-time consensus
The convergence within a finite-time interval in the consensus problems can be generally divided into the following categories (Colunga et al. 2018):
-
Finite-time convergence
-
Fixed-time convergence
-
Predefined-time convergence
In the finite-time convergence, the agents with any arbitrary initial values agree on a consistent state, only within a finite time interval. The convergence of the MASs under these conditions is technically called the “finite-time consensus”. In case the time intervals are limited, and they have been assigned an upper bound which is independent of the initial conditions of the agents, we will have a fixed-time convergence. It is almost impossible to find a straightforward relationship between the convergence time and the protocol parameters in each of the two mentioned consensus categories (i.e., finite-time/fixed-time consensus), especially when there are real-time constraints. One solution for this problem is to use the predefined-time convergence. In this approach, the exact time of reaching a consensus by the agents is a priori parameter in the consensus protocol; which, like the previously mentioned consensuses, is independent of the initial conditions of the agents. Based on what was said, the fixed-time consensus and the predefined-time consensus can be considered as a special case of the finite-time consensus. Therefore, we are going to focus on and review the works carried out on the finite-time consensus.
The advantages of finite-time control methods, such as faster transient response, higher precision, faster convergence and better disturbance rejection, have recently attracted the attention of more researchers to finite-time control. In analyzing the consensus problems, the convergence rate is considered an important performance index for consensus protocols. In other words, consensus algorithms depend on the rate of convergence. In this respect, many researchers are after more suitable communication topologies in order to attain higher convergence speeds. Han et al. (2017a) have presented finite-time consensus for second-order MASs. Also, finite-time consensus and a collision avoidance control algorithm for autonomous unmanned vehicles (AUVs) have been presented in Li and Wang (2013).
Presently, most of the developed consensus algorithms are asymptotic in nature. This means that they reach an optimal convergence rate in infinite time and, as a result, the states of the agents in a system cannot coincide with each other in finite time (Klotz et al. 2014). This is while many of the practical control systems need exact convergence time and fast response in order to dynamically move toward the system’s equilibrium point or to reach a tracking error of zero at finite time. It has been revealed that if the eigenvalues of the Laplacian graph matrix, known as algebraic connectivity, are arranged from the smallest to the largest, then the second eigenvalue in that sequence will indicate the rate of consensus convergence under the protocol expressed in Olfati-Saber and Murray (2004).
Using the properties of the minimal polynomial of the weighted matrix, Sundaram and Hadjicostis (Sundaram and Hadjicostis 2007) presented a finite-time consensus algorithm for discrete-time systems. Also, CortéS (2006) proposed two finite-time consensus protocols for continuous-time MASs. In (Wang and Hong 2008), finite-time consensus algorithms were developed for multi-agent networks with second-order dynamics. For theoretical analysis of these systems, they have used the Lyapunov function, properties of homogeneity, and graph theory. Based on the homogeneous theory, finite-time leader–follower consensus controllers have been presented for second-order MASs with constrained control inputs (Lu et al. 2013; Zhiqiang et al. 2015). Fu et al. (2017) presented a new class of finite-time consensus controller with only one saturated function for second-order MASs subjected to input saturation. They evaluated both the leader-based strategy and the strategy without an agent leader.
The major methods used for studying finite-time consensus can be divided into two groups. One group has employed the homogeneous theory, and the other is based on the Lyapunov function and determining the consensus time boundaries (Li and Tan 2019). The homogeneous theory has three steps. The first step deals with proving the asymptotic stability of the consensus problem by using the Lyapunov function and combining it with the Barbalat’s Lemma. The second step involves the proving of the finite-time local stability of the consensus problem by means of the homogeneous theory. And the third step tries to combine the first two steps to achieve global stability. Table 5 shows a survey of the research works conducted on the finite-time consensus problem between the years of 2006 and 2021.
4.6 Bipartite consensus
MASs are based on the cooperation of groups of agents with one another to achieve a certain state. Nevertheless, in some cases, the agents of a system have to compete with each other. Some examples of this behavior can be found in the rivalries that exists in markets or social networks, the repulsion among electrical charges, and the deterrence effect in a neural network or genetic regulatory network; in which the agents engage in non-cooperative or antagonistic interactions with some of the neighboring agents (Valcher and Misra 2014; Hu 2014). This is also true in consensus. In this case, the agents will reach an agreement on a specific value without cooperating with one another. According to what was stated in Sect. 1, the cooperation/competition between agents can be modeled by signed weighted (directed or undirected) graphs; with the difference that the weighted values of edges will be positive in cooperative interactions and negative in competitive ones.
With the increase in the scale of systems and their complexity, it would be difficult to reach a single equilibrium point with conventional control schemes. For this purpose, some researchers, in addition to the notion of complete consensus, have brought up new concepts such as scaled consensus, group consensus, and bipartite consensus.
-
Complete consensus All the agents will converge to a common value.
-
Scaled consensus The agents will reach assigned proportions, rather than a common value.
-
Group consensus The agents will be divided into different groups/sub-networks, and each group will converge to a different value.
-
Bipartite consensus All the agents will converge to a value of the same size (amplitude) but different sign (Hu 2014). It can be considered as a special case of scaled consensus (Sun et al. 2019).
Altafini (2012) developed bipartite consensus for networks with antagonistic interactions between agents and presented a new concept called “agreed upon dissensus”. He also demonstrated that by applying distributed Laplacian-like control and assuming a structurally balanced communication topology, the agents will achieve bipartite consensus; i.e., all the agents will reach final states of the same size but with opposite signs.
The main notion of structural balance theory, which is rooted in psychological studies, is that in a structurally balanced graph, either there is no negative link, or that its total number of apexes can be subdivided into two sections so that all the communications within each section are of positive type, and any communication between these two sections is of negative type. This condition obviously means that there is no loop in the graph with an odd number of negative edges (Cartwright and Harary 1956).
Later on, by generalizing the theory of structural balance and reducing the constraints, Davis (1967) introduced the weak structural balance and showed that a signed graph has a weak structural balance (i.e., it can be clustered) if it doesn’t contain a loop with exactly one negative edge. In this case, it is proven that the total number of graph apexes can be partitioned into two or several sections so that all the communications between the elements of each section are of positive type, and any communication between two elements from two different sections is of negative type.
It can be demonstrated that bipartite consensus is achieved when its graph has a spanning tree and it also enjoys structural balance (Tian et al. 2018). For attaining consensus, it is highly important to properly define the neighborhood consensus error (Zhang and Chen 2014). Also, the problem of bipartite consensus in high-order MASs with directed and undirected communication topologies has been presented in Valcher and Misra (2014). Recently, a new continuous-time dynamic model based on the patterns of amity and enmity has been developed in Shang 2020a, which presents a social balance solution for the finite-time consensus with two and four factions. In another research (Qin et al. 2016), based on the low-gain feedback approach, the authors have investigated the distributed feedback control for achieving semi-global bipartite consensus in a group of homogeneous generic linear agents with input saturation, and under directed topology.
In the cited papers and in many other research works on the bipartite consensus, the disturbance effects have been ignored. This is because the presence of any disturbance or uncertainty in the models adds certain peculiar complexities to the bipartite consensus problem. Nevertheless, Ding et al. (2021) were able to solve the second-order bipartite consensus problem for a networked robotic system in the presence of the time-varying delayed communication and external disturbances. Also, in Rong et al. 2021b, the bipartite consensus problem and the antagonistic interactions and deterministic disturbances were investigated in the general linear networks. For checking more papers on this subject, please refer to Table 6.
4.7 Cluster consensus/Group consensus
Cluster analysis (clustering) is a process through which a set of objects can be partitioned into separate groups. Each group is called a cluster (Vermunt and Magidson 2002). The members of a cluster, based on their inherent characteristics, are very alike; but the clusters have the least similarity between them.
In practice, for various reasons, sometimes the agents need to be classified into separate groups, each of which is called a cluster. In this case, each cluster can be considered as a separate system. Each of these clusters may then converge to a different constant value, and the movements of clusters may not coincide with each other (Qin and Yu 2013). In other words, each cluster forms a complete consensus, whose equilibrium point doesn’t have to adapt to that of the other clusters.
Qin and Yu (2013) studied the problem of cluster consensus (group consensus (Ma et al. 2016)) for MASs by modeling each agent with generic linear agent dynamics, which is a generalization of the integral dynamics model, under fixed and switching interaction topologies. Then, by relying on the concepts of graph theory, matrix analysis theory, Lyapunov stability theory, and pinning control techniques, they showed that there is no correlation between the cluster consensus behavior and the magnitude of couplings among agents and acyclic partitioning.
A new type of cluster consensus for MASs with different subgroups was explored in Chen et al. (2011), and based on the Markov chain and non-negative matrix analysis, two cluster consensus criteria were presented for discrete-time systems with fixed and switching topologies. This paper can be considered as an answer to the two questions of how to determine the clusters and how to guarantee consensus in MASs.
Zhan and Li (2017) studied the problem of cluster consensus in MASs with weighted cooperative-competitive interactions. For this purpose, they divided the interactions among agents into three classes: interactive, balanced, and unbalanced. This research showed that, in contrast to the first two classes, reaching an agreement in cluster consensus with unbalanced interactions between agents requires the implementation of input control on specific pinned agents; a process which is called “pinning control”.
Due to the presence of intentional and unintentional errors in MASs, confronting the adversarial agents in such systems becomes highly important. This type of consensus has been named “flexible cluster consensus”. In this regard, a new concept of robust network known as “r-robust” is introduced. In this proposed algorithm, Zhang and Sundaram (2012) have considered no initial knowledge of network topology and adversarial agents. By exploiting this concept, Shang (2020b) studied the problem of flexible cluster consensus in continuous-time, discrete-time, and switched MASs and obtained the sufficient conditions for consensus in all three scenarios.
The notion of cluster-delay consensus was first presented in Ma et al. (2016). In this type of consensus, all the agents in similar clusters reach an identical consensus, and at the same time, two agents in different clusters achieve delayed consensus. This concept was then used in the first-order MASs with first-order nonlinear dynamics, under directed topology. Also, by applying the graph theory, matrix theory and the Lyapunov stability theory, a control protocol was presented for cluster-delay consensus. Table 7 shows a summary of the research work regarding the group consensus problem.
4.8 Scaled consensus
In scaled consensus, contrary to complete consensus, the agents will reach assigned proportions, rather than a common value.
The scaled consensus of second-order nonlinear MASs with time-varying delays has been investigated in Zhang et al. (2019), using the directed graph. The major difference of this paper with most other research works is that the time-varying delays have been incorporated into both the network communications and the dynamics of agents. In 2017, based on the work in Roy (2015), Wang (2017) studied the scaled consensus of agents with single-integrator dynamics, and by considering output saturation, under the topologies of undirected graph and strongly connected graph. He was also able to attain the necessary and sufficient conditions for consensus convergence by applying the Lyapunov function.
Most of the research works in the area of scaled consensus have studied MASs with homogeneous agents, and very few papers have focused on the scaled consensus of heterogeneous agents; while the agents with varied dynamics are involved in more practical applications.
Convergence rate is an important parameter in the design of consensus protocols. Linear systems can only achieve asymptotic convergence, and usually there is no guarantee for reaching consensus in a finite time (Mesbahi and Egerstedt 2010); while in reality, and according to system theory, it is necessary to have controllers that can reach consensus in the least possible time. In addition to facilitating faster consensus, these controllers will also improve the rejection of disturbances and will make MASs more robust to uncertainties (Bhat and Bernstein 2000; Wang and Xiao 2010).
Shang (2018) studied finite-time scaled consensus control based on linear iterations and graph theory for discrete-time MAS. In another research (Shang 2019), he has examined the problem of scaled consensus for MASs comprising continuous-time and discrete-time subgroups. The main objective was to create a systematic framework for dealing with convergence in switched MASs. This work can be divided into three parts. In the first part, he has presented scaled consensus protocols with three different rates for asymptotic convergence, fixed-time convergence, and finite-time convergence. In the second part, by using the Lyapunov function and the graph theory, he has obtained the settling time in scaled consensus protocols with fixed-time and finite-time convergence rates. In the third part, he has introduced the problem of scaled formation control and presented a solution for it.
By surveying most of the research papers published on the subject of consensus, it can be concluded that scaled consensus is a generalization for the problems of bipartite consensus, signed consensus, complete (standard) consensus, and cluster consensus. In other words, if MASs are divided into distinct subsystems, and each subsystem converges to a different common value, then they can be grouped as complete consensus or cluster consensus problems; and in case a specific scale is used, they can be classified as bipartite consensus or signed consensus problems (Shang 2019).
5 Anti-disturbance consensus control strategies
The problem of disturbance rejection in control systems has been investigated for 40 years from different aspects. Disturbances, including external disturbances and system uncertainties (Wang et al. 2016), are always present in all real systems and have destructive effects on their performance (Yu et al. 2017). Thus, it is essential to study and examine the problem of consensus in the presence of various disturbances. The control approaches to deal with disturbances in the consensus problem can be divided into two categories: robust control, and adaptive control.
Different methods and techniques such as the output regulation theory, neural networks, and fuzzy logic have been employed in robust and adaptive controllers; with each approach having its own particular advantages and drawbacks (Wang et al. 2016).
In another division, and from the perspective of single disturbed systems, the anti-disturbance control techniques can be divided into two groups (Yu et al. 2017):
-
1)
Feedback control these methods improve system performance by suppressing the disturbances. The infinity norm (\(H_{\infty }\)) control, robust adaptive control, and variable structure control are the control methods in this group.
-
2)
Feedforward control These methods estimate the amount of disturbance through inspection, and compensate it at the right time. This group includes the disturbance-observer-based control and the active disturbance rejection control.
Selecting a type of controller for dealing with disturbances depends on the type of disturbance and the application of the system.
5.1 Robust consensus control
Robust control emphasizes the stability and robustness of a control system against fluctuations and uncertainties. The aim of robust control design is to create a control system in which the variations of system conditions have the least effect on system output. In other words, the increased reliability of a control system and especially, its effective performance or stability in the presence of uncertain agents, un-modeled dynamics, or disruptive factors such as disturbance and unwanted inputs are the most important objectives pursued in the designing of a robust controller. There are different methods for designing robust controllers, including the H∞, H2, combination of H∞ + H2, and the μ-synthesis approaches. Ao and Jia (2018) claimed that the performance of H∞ + H2 together has not been evaluated in MASs. It should be mentioned that the notion of robustness is not an absolute concept, and that every controller structure is robust to some extent. Hence, many of the known control methods such as proportional-integral-derivative (PID) control, sliding mode control (SMC) and backstepping control enjoy a certain degree of robustness.
The proportions of using PID, sliding-mode, H2/ H∞ and backstepping robust controllers have been compared in Figs. 5 and 6. As is observed, in the consensus problem, the backstepping control has been employed more frequently than the PID and the SMCs. The reason is the simple and the step-by-step design process of this technique. Also, the backstepping method does not suffer from the chattering phenomenon as does the sliding mode approach. This control method is extensively used in various nonlinear systems.

Source scientific papers with mentioned keywords on MASs field indexed by Google Scholar until August 2020
Comparing the proportions of using PID, sliding-mode, backstepping, and H2/ H∞ robust controllers in the consensus problem of MASs in the last two decades.

Source scientific papers with mentioned keywords on MASs field indexed by Scopus
Comparing the proportions of using PID, sliding-mode, backstepping, and H2/ H∞ robust controllers in the consensus problem of MASs in the last two decades.
5.1.1 \(\user2{ H}_{2} /\user2{ H}_{{\infty \user2{ }}}\)consensus control
Numerous research works were conducted on the subject of H2/ H∞ control, especially in the 1990s (Ao and Jia 2018). For example, Runolfsson (1990) presented a novel method for analyzing the problem of infinite-time risk-sensitive linear quadratic Gaussian (LQG) control and described its relation to the H∞ control approach. In another research (Bernstein and Haddad 1989), the design of LQG controller was explored along with the H∞-disturbance attenuation and a new approach based on three coupled Riccati equations was presented.
Lin et al. (2008) studied the robust H∞ consensus for single-integrator MASs of agents with fixed and switching topologies subjected to external disturbances and model uncertainties, in the presence/absence of time delays. Subsequently, they were able to establish the conditions that guaranteed the convergence of all agents to consensus, while achieving satisfactory H∞ performance over fixed and switching topologies.
The problem of H∞ consensus in continuous-time MASs with linear dynamics and relative output measurements was examined in Zhao et al. (2012). Also, a new observer-type consensus protocol was presented for dealing with H∞ consensus performance, and it was demonstrated that the problem of H∞ consensus in continuous-time MASs with linear dynamics will be solved if, and only if, the coupling strength of the present protocol belongs to the performance region of the closed-loop system’s H∞ consensus.
By exploiting tools such as Lyapunov stability analysis and the algebraic graph theory, Wang et al. (2013) investigated the H∞ consensus in a group of closed-loop linear MASs by using a strongly-connected directed graph. They revealed that the distributed H∞ consensus is achieved by properly designing the considered protocol.
5.1.2 Sliding mode consensus control
As a robust controller, the SMC has demonstrated a good performance against structural and non-structural uncertainties. The main advantages of SMC are its insensitivity to external disturbances, robustness against system uncertainties, system stability guarantees, quick dynamic response, and easy implementation (Edwards and Spurgeon 2002).
In a system managed by the SMC, the transferring of system states is basically accomplished in two steps: designing a switching control law, and designing an equivalent control law. In the first step, switching control is used for transferring the states of a system to a specific sliding surface. And in the second step, the staying of system states on the sliding surface is guaranteed by means of equivalent control (Edwards and Spurgeon 2002).
SMC has two advantages. The first is that by choosing an appropriate sliding function, the desired dynamic behavior of a system can be assured. The second is that a system’s closed-loop response is not at all sensitive to uncertainties (model parameters, disturbances, and nonlinearity). Thus, from a practical viewpoint, nonlinear processes can be managed by SMC, in the presence of disturbance and model uncertainties.
In the last decade, many researchers got interested in applying the fuzzy logic in the control of nonlinear and uncertain systems. Guo et al. (2013) presented a robust controller based on adaptive fuzzy SMC; and the aim of using the fuzzy logic was to attenuate the chattering produced by the SMC approach. By combining the fuzzy SMC with the consensus control based on graph theory, Chang et al. (2011) were able to present a new formation control strategy. They applied this control scheme on MASs with single-integrator dynamics, in the presence of uncertainties; and system stability was confirmed by means of Lyapunov theory.
Recently, new results have been reported by Zhang et al. (2018) on the SMC for Takagi–Sugeno fuzzy MASs. Their research can be divided into three main sections. In the first section, a new method was presented for T-S fuzzy MASs. In the second section, a fuzzy-based dynamical SMC was designed with the goal of attenuating the external disturbances. And in the third section, the proposed approach was compared with nonlinearity-feedback controllers.
An indirect adaptive fuzzy SMC method was presented by Wang et al. (2001). They designed this controller for a class of nonlinear systems by using the notion of SMC and the Lyapunov approach. Their findings showed that in the presence of unknown disturbances, controller performance will improve by using adaptive fuzzy logic alongside the SMC. For the first time, an arbitrary-order single input–single output (SISO) sliding controller with finite-time convergence was introduced in Yi et al. (2005). Although the presented technique did not exhibit satisfactory performance for large-scale underactuated systems. The problem of robust scaled consensus control for MASs with networked linear coupling dynamics, and exposed to external disturbances, was investigated in Zhao et al. (2017) by applying the new distributed H∞ sliding mode-based control approach. The proposed technique is an extension of the traditional H∞ SMC which has been used to solve the problem of robust scaled consensus under directed switching topologies.
5.1.3 Backstepping consensus control
Similar to the SMC, the backstepping control is also one of the robust control methods used to manage multi-agent or nonlinear systems subjected to external disturbances. This technique was developed by Ioannou and Kokotovic during the 1990s for designing stable controllers for a group of nonlinear systems (Ioannou and Kokotovic 1985). By modifying the previous research works in Morse et al.1991 and (Diego et al. 1995), Ezal et al. (2000) presented a locally optimal and robust backstepping controller in 2000; which had strong global stability properties. In designing the proposed controller, they considered three major objectives: local optimization, global inverse optimality, and global-disturbance attenuation.
A consensus tracking control approach has been presented in Shang et al. (2018) for high-order nonlinear MASs. The proposed method has two major differences with consensus tracking problems studied in other research works. The first difference is related to the modeling of agents. Each follower agent has been modeled by means of a non-strict feedback system. As to the second difference, the consensus tracking controller has been designed by combining an adaptive neural network with backstepping techniques. Lu et al. (2019) explored the adaptive consensus tracking control of uncertain nonlinear MASs with predefined accuracy. In this paper, asymptotic consensus has been reached by considering new notions of Lyapunov function. Also, it has been shown that synchronization error asymptotically converges to a predefined distance.
The consensus problem for a group of leader–follower high-order nonlinear MASs subjected to mismatched disturbances has been studied in Wang et al. (2017). Also, it has been assumed that the agents are exposed to fast time-varying types of disturbances; because they are more common than the slow time-varying types. Then, a combination of backstepping and generalized proportional integral observer techniques has been used to solve the consensus problem.
The problem of finite-time leader–follower consensus of agents in the presence of external disturbances was investigated in He et al. (2017), in which the follower agents were modeled by means of Euler–Lagrange systems. A virtual error was considered for each follower agent; and the considered distributed control was designed in the context of backstepping techniques and by considering the relationship between the errors of leader/follower agents and the virtual errors.
5.1.4 PID consensus control
Due to its simple and easy-to-understand structure, compared to more advanced controllers, the PID controller is extensively used in various industries. PID controllers perform satisfactorily in controlling many of the processes that have first- or second-order dynamics and whose operating ranges are not too large (Deshpande 1989); and presently, more than 95% of all industrial controllers are still PID types (Åström and Hägglund 1995). Although this controller has three parameters, many techniques have been proposed in the last several decades, and since the presentation of the Ziggler-Nicholes method, for finding the optimal values of these parameters. In this regard, the use of phase margin, gain, and frequency response is not suitable for severely nonlinear and time-variant processes; and also the modified forms of these parameters don’t yield good results for processes with vast operating ranges (Chu and Teng 1999). Different techniques have been proposed for designing PID controllers adaptively and obtaining their parameters online via process identification, neural network and fuzzy logic methods.
A containment control method of PIn-type in continuous- and discrete-time domains has been presented in Cheng et al. (2015) for MASs with dynamic leaders. It should be mentioned that the value of n in In indicates the integral order in the proposed algorithm; which, in the general case, can be expanded as PIn−mDm. The presented approach is only applicable to systems with integrator dynamics or first-order integrator dynamics and cannot be used in high-order MASs.
Contrary to most former research works in which a PID controller has been employed to deal with the consensus of agents with first- and second-order dynamics, a robust distributed PID controller has been presented in Shi and Yang (2018) for high-order linear MASs. This controller has been designed based on the notion of “edge agreement protocol”, and its performance in the presence of external disturbances has been verified. The edge agreement protocol is a new concept in consensus studies; in which node dynamics are transformed to edge dynamics.
Nguyen has also used the “edge dynamics” approach in his paper to develop a distributed consensus controller for linear MASs with multi-input multi-output agents under undirected communication topologies. Also, by exploiting two optimal design methods at local and global levels, he designed a distributed stable controller. Then, by expanding his technique, he was able to present a reduced-order distributed consensus controller for MASs with linear dynamics (Nguyen 2016).
5.2 Adaptive consensus
The years of 1960s constituted the most important period for the development of control theory, and especially, the adaptive control. The state space methods and the Lyapunov stability theory were introduced in this period. In 1966, Parks employed the Lyapunov design strategy to redesign the adaptation rules based on the MIT law, which had been used in model-reference adaptive control. Although his approach could only be applied to a special class of LTI systems, it opened a new door to precise proof of stability in more general adaptive control systems (Parks 1966). In 1970s, model-reference adaptive control schemes based on the Lyapunov design were presented and analyzed. In the early part of 1979, researchers concluded that the designs presented in 1970s will lead to system instability in the presence of low disturbances. This prompted the researchers to examine the causes of instabilities and to find ways to overcome them. In the middle of 1980s, new designs were proposed and analyzed. These designs formed the basis of what is now known as “robust adaptive control”. The difference between adaptive control and robust control is that in the adaptive control, we don’t need to know the working range of a system or the parameter errors. In other words, in a robust control scheme, a system is only stable within a specific operating range. Adaptive control is divided into direct and indirect methods; and most research works today are focused on direct adaptive control.
A traditional adaptive control method for reaching consensus in the presence of uncertainties has been used in Cheng et al. (2008). Lengthy and involved computations, regression matrix analysis, and the assumption of linearity-in-parameters are some of the inherent drawbacks of traditional adaptive approaches. In order to deal with such problems, more researchers started to use neural networks in system control; because of their universal approximation capabilities. For example, the use of adaptive controllers along with neural networks to achieve consensus in MASs by assuming linearity-in-parameters was evaluated in Polycarpou and Ioannou (1991) for the first time.
The projection technique is another common approach used in the adaptive consensus. The projection-based consensus has been explored in Shang 2020c for the MASs that are under the directed networks with state constraints. It was also demonstrated that the resilient constrained consensus in the robust networks can only be achieved when the constraint sets are convex and share a non-empty overlap.
The problem of consensus in the presence of disturbances and with agents of uncertain nonlinear dynamics has been investigated in Hou et al. (2009) by employing stable control techniques and neural networks. Chen et al. (2014) applied the radial basis function neural network and the Lyapunov–Krasovskii function for the consensus control of nonlinear MASs with uncertain dynamics and time-delayed dynamics, respectively.
The use of adaptive control in the distributed consensus of nonlinear fractional-order MASs with directed topologies was first presented in 2016 (Gong 2016). In this work, by employing the Mittag–Leffler stability concept and the direct fractional Lyapunov method, the consensus problem was solved for MASs with a totally-connected topology.
6 Applications of consensus
In recent years, the notion of consensus has been explored in different applications, including UAVs, underwater vehicles, traffic control, wireless sensor networks (WSNs), and economic decisions. For example, a consensus-based algorithm with leader–follower control structure has been designed in Hu et al. (2017) for the collision avoidance of multiple UAVs flying in 3D space. In the rest of this section, the consensus schemes most frequently used in MASs have been briefly reviewed.
6.1 Rendezvous
Rendezvous refers to the meeting between two or several agents at a specific time and location; which is planned through negotiation between these agents. Rendezvous is also very common in the world of animals. For example, migrating animals need to meet one another in order to share information about food sources; they should also be able to find one another during the mating season; and many more examples. So, rendezvous is an inherent need in MASs. Consensus algorithms are used in the negotiations between agents in order to guarantee system stability in the presence of environmental disturbances such as noise and wind (Ren and Beard 2008b).
Usually, in research works, the navigation problems and difficulties of agents in their natural environment are ignored, and it is assumed that an agent always finds and reaches its target destination. Thus, an agent can be considered as a model point that can move arbitrarily in free space. Lin et al. ( 2003) have considered distributed strategies in which sequences of stop-and-go maneuvers (Ando et al. 1999) are performed to guide each agent toward a specified rendezvous location. A stop-and-go maneuver is carried out within a time interval in two steps. The first step, which is called the sensing period, includes fixed lengths during which an agent remains stationary and motionless. The second step, which is known as the maneuvering period, consists of variable lengths during which an agent moves from its current position toward the next point and becomes stationary again.
Figure 7 illustrates a simple coordination framework for the rendezvous problem in MASs. This framework includes a control section, and by relying on distributed consensus algorithms, it guarantees the access of all agents to a specified target such as the time or location of a rendezvous. Based on the output of the control section, each agent uses a local control law to obtain the time or location of rendezvous. The application of Fig. 7 has been described in Kingston et al. (2005), in which several UAVs are simultaneously controlled up to a radar detection boundary.

A simple coordination framework for rendezvous in MASs
6.2 Formation control
Formation control is an important problem in the coordination and management of a group of agents. The agents in a MAS, while sustaining their positions and relative orientations, should follow a predefined path in order to reach a specific point (i.e., destination). In formation control problems, we need to focus on many issues, such as formation stability, the ability to control different patterns during formation, and formation safety and uncertainty. There are other issues that relate to the design of controllers for agents formation. These subjects include the geometric shape of formation, formation reconfiguration, formation follow up, and also determining the duties of each agent within the formation (Oh et al. 2015).
For controlling the formation of a group of agents, depending on the considered scenarios, different control topologies can be adopted. One or more leaders may exist in this group; and the other agents may follow this/these leader(s) in a special way. Each agent has a certain ability in exploring and detecting the environment with its sensors and in computing and processing of collected data. In some cases, and depending on the type of application considered, the agents could also have limited relationship with each other. However, in general, it is impossible for each agent to acquire comprehensive information about its surroundings and the existing conditions. Therefore, a controller design for each robot should be based on local information (Han et al. 2017b). If the system has no assigned leader, then the agents should interact with their neighboring agents and share their information in order to reach the target goal.
In formation control, each agent knows about the final geometrical shape of the formation; but its position should be determined through negotiation between agents. The turning point in solving the problem is to determine the central point of formation. For this purpose, each agent proposes a certain point, and then a consensus algorithm is used to get to the final focal point. In (Li et al. 2019), the formation control of a group of mobile robots has been investigated, and the formation center has been determined by applying a consensus algorithm.
Figure 8 shows a formation control problem for a MAS under a special topology (for the initial conditions of agents and the consensus-based control algorithm, please refer to Huang (2017)).

a Rendezvous, b axial alignment, and c formation control in MASs for a specific topology d (Huang 2017)
6.3 Axial alignment
In axial alignment implementation, several mobile robots collectively align their final positions along a set line. Anggraeni et al. (2019) investigated the fixed-time axial alignment problem for a group of mobile robots by adopting a second-order dynamic model and the leader–follower strategy. For this purpose, they considered six virtual follower agents and one leader agent. Axial alignment for four mobile robots (with a control algorithm based on prescribed consensus law) was explored in Huang (2017).
In axial alignment, the basic consensus algorithm can be expressed as
where \(\delta_{i}\) is a fixed preset vector and \(\Delta_{ij} = \delta_{i} - \delta_{j}\) is the desired separation distance. By applying the stated control algorithm, and under the prescribed communication topology, and by considering \(\delta_{1} = \left[ {\begin{array}{*{20}c} 0 \\ 0 \\ \end{array} } \right]\), \(\delta_{2} = \left[ {\begin{array}{*{20}c} 0 \\ {0.4} \\ \end{array} } \right]\), \(\delta_{3} = \left[ {\begin{array}{*{20}c} 0 \\ {0.8} \\ \end{array} } \right]\) and \(\delta_{4} = \left[ {\begin{array}{*{20}c} 0 \\ {1.2} \\ \end{array} } \right]\), the axial alignment of Fig. 8 will be obtained.
6.4 Wireless sensor networks
A sensor network comprises a large number of sensor nodes, from a few sensors to several hundred sensors. These sensors are dispersed in a vast region to collect the desired information from that environment. The locations for placing the sensor nodes are not necessarily determined and specified in advance. This enables us to leave these sensors in dangerous and inaccessible sites.
Prasanna and Rao (Han et al. 2017b) have divided the applications of WSNs into eight different categories, the most important of which are military or border surveillance, environmental applications, and medical applications. The subject of coverage in sensor networks has recently attracted a lot of attention. Coverage is generally defined as the manner and extent of scanning an environment by sensors. Coverage control is used in different applications such as search and rescue missions during natural disasters, harvesting of agricultural products, cleanup of contaminated sites, etc. (Yick et al. 2008; Puccinelli and Haenggi 2005).
The most importconclant challenges regarding the WSNs are: coverage and deployment, scalability, service quality, network size, computing power, productivity, and security (Hill et al. 2000). Among these, security is the main concern in WSNs.
In (Prasanna and Rao 2231), the different types of attacks on WSNs have been classified as follows:
-
Common attacks includes eavesdropping, message modification, and message replay.
-
DoS (Wood and Stankovic 2002) includes node collaboration, jamming attack, and exhaustion of power.
-
Node compromise an external attacker gains access to the information of a sensor node.
-
Impersonation a node impersonates the identity of another node(s) and uses it to attack the system.
-
Protocol-specific includes various types of attacks against routing protocols.
The aim of the average consensus protocol is to converge the values of all the nodes in a network to the mean value of data measured by the initial nodes. Average consensus has various applications. The calculation of distributed mean consensus in WSNs has been explored in Cardei and Wu (2004); and for this purpose, a completely distributed algorithm has been presented, which is able to average the data measured in the network itself.
7 Conclusion and future works
During the last several years, the subject of consensus in multi-agent systems has attracted a lot of attention. Consensus means agreeing on a specific state or value; and since in studying the subject of consensus, graph theory is usually used to model the multi-agent systems, the graph theory and various types of dynamic models for agents, including the single-integrator, double-integrator, and high-order models, have been described in this paper. We have conducted a survey of consensus topics and reviewed the research activities, especially those carried out in the last decade, on the following types of consensus: sampled-data consensus, quantized consensus, consensus in random networks, leader–follower consensus, finite-time consensus, bipartite consensus, group consensus/cluster consensus, and scaled consensus.
At the start of each section, we have tried to present a brief history of the subject, before classifying and reviewing the related works and research endeavors, especially those undertaken in the last decade. At the end, we have discussed the major applications of consensus, including the problems of rendezvous, formation control, axial alignment, and wireless sensor networks, and presented the simulations performed in different papers.
In spite of the extensive research works on consensus, still there are many unresolved challenges and issues. On the one hand, most of the research efforts in this field are focused on the theoretical studies and the results of the developments and innovations in this area are mainly verified through simulation and less attention is paid to hardware implementation. While in the actual implementation of a multi-agent system, different factors such as the sensor noises and time-delays, communication interferences, and the external disturbances will adversely affect the system and disrupt its operation. On the other hand, because of the high complexity of some subjects, either they have been totally ignored by the researchers or seldom explored even in the theoretical studies. Some of these more complex topics include the secure consensus, robust consensus, predefined-time consensus, finite-time pinning consensus, and the subjects related to the deception attacks. There seems to be a deep void in the studies related to the mentioned research themes and especially the high-order nonlinear heterogeneous networks with the switching topology and in the presence of delay and noise. Hopefully, more researchers will attempt to study the stated subjects in their future works, and we will witness the actual implementation of consensus in the real-world applications.
References
Abaid N, Porfiri M (2010) Consensus over numerosity-constrained random networks. IEEE Trans Automat Contr 56(3):649–654
Adibzadeh A, Suratgar AA, Menhaj MB, Zamani M (2020) Constrained optimal consensus in multi-agent systems with single-and double-integrator dynamics. Int J Control 93(3):575–587
Altafini C (2012) Consensus problems on networks with antagonistic interactions. IEEE Trans Automat Contr 58(4):935–946
Anderson WN Jr, Morley TD (1985) Eigenvalues of the Laplacian of a graph. Linear Multilinear Algebr 18(2):141–145
Ando H, Oasa Y, Suzuki I, Yamashita M (1999) Distributed memoryless point convergence algorithm for mobile robots with limited visibility. IEEE Trans Robot Autom 15(5):818–828
Anggraeni P, Candra WA, Defoort M, Djemai M (2019) “Experimental implementation of fixed-time leader-follower axial alignment tracking,” in 2019 International Conference on Mechatronics, Robotics and Systems Engineering (MoRSE), pp. 86–91
Ao Y, Jia Y (2018) Distributed H 2/H infinity consensus control and iterative approach for multi-agent systems with directed graph. IEEE Int Conf Big Data Smart Comput (BigComp) 2018:141–146
Åström KJ, Hägglund T (1995) PID controllers: theory, design, and tuning, vol 2. Instrument society of America Research Triangle Park, NC
Barkai G, Mirkin L, Zelazo D (2021) On sampled-data consensus: divide and concur. IEEE Control Syst Lett. https://doi.org/10.1109/LCSYS.2021.3074589
Bernstein DS, Haddad WM (1989) LQG control with an H_infinity performance bound: a Riccati equation approach. IEEE Trans Autom Control 34(3):293–305
Bhat SP, Bernstein DS (2000) Finite-time stability of continuous autonomous systems. SIAM J Control Optim 38(3):751–766
Bollobás B (2013) Modern graph theory, vol 184. Springer, New York
Bondy JA, Murty USR (1976) Graph theory with applications, vol 290. Macmillan, London
Boyd S, Ghosh A, Prabhakar B, Shah D (2006) Randomized gossip algorithms. IEEE Trans Inf Theory 52(6):2508–2530
Campion G, Bastin G, Dandrea-Novel B (1996) Structural properties and classification of kinematic and dynamic models of wheeled mobile robots. IEEE Trans Robot Autom 12(1):47–62
Cardei M, Wu J (2004) Coverage in wireless sensor networks. Handb Sens Netw 21:201–202
Cartwright D, Harary F (1956) Structural balance: a generalization of Heider’s theory. Psychol Rev 63(5):277
Censi A, Murray RM (2009) Real-valued average consensus over noisy quantized channels. Am Control Conf 2009:4361–4366
Chang Y-H, Chang C-W, Chen C-L, Tao C-W (2011) Fuzzy sliding-mode formation control for multirobot systems: design and implementation. IEEE Trans Syst Man Cybern Part B 42(2):444–457
Chen Y, Lü J, Han F, Yu X (2011) On the cluster consensus of discrete-time multi-agent systems. Syst Control Lett 60(7):517–523
Chen W, Li X, Jiao LC (2013) Quantized consensus of second-order continuous-time multi-agent systems with a directed topology via sampled data. Automatica 49(7):2236–2242
Chen CLP, Wen G-X, Liu Y-J, Wang F-Y (2014) Adaptive consensus control for a class of nonlinear multiagent time-delay systems using neural networks. IEEE Trans Neural Networks Learn Syst 25(6):1217–1226
Chen F, Dimarogonas DV (2019) Consensus control for leader-follower multi-agent systems under prescribed performance guarantees in 2019 IEEE 58th Conference on Decision and Control (CDC), pp 4785–4790
Cheng L, Wang Y, Ren W, Hou Z-G, Tan M (2015) Containment control of multiagent systems with dynamic leaders based on a $ PI^{n} $-type approach. IEEE Trans Cybern 46(12):3004–3017
Cheng L, Hou Z-G, Tan M (2008) Decentralized adaptive consensus control for multi-manipulator system with uncertain dynamics in 2008 IEEE International Conference on Systems, Man and Cybernetics pp 2712–2717
Chowdhury M, Zaharia M, Ma J, Jordan MI, Stoica I (2011) Managing data transfers in computer clusters with orchestra. ACM SIGCOMM Comput Commun Rev 41(4):98–109
Chu S-Y, Teng C-C (1999) Tuning of PID controllers based on gain and phase margin specifications using fuzzy neural network. Fuzzy Sets Syst 101(1):21–30
Colunga JA, Vázquez CR, Becerra HM, Gómez-Gutiérrez D (2018) Predefined-time consensus of nonlinear first-order systems using a time base generator. Math Probl Eng 2018:1–11
Consolini L, Morbidi F, Prattichizzo D, Tosques M (2008) Leader–follower formation control of nonholonomic mobile robots with input constraints. Automatica 44(5):1343–1349
CortéS J (2006) Finite-time convergent gradient flows with applications to network consensus. Automatica 42(11):1993–2000
Davis JA (1967) Clustering and structural balance in graphs. Hum Relations 20(2):181–187
De Queiroz M, Cai X, Feemster M (2019) Formation control of multi-agent systems: a graph rigidity approach. Wiley, Hoboken
Deshpande PB (1989) Multivariable process control. Instrument Society of America. Research Triangle Park, NC, U.S.A
Diego S, Krstic´ M, Kanellakopoulos I, Kokotovic´ PV (1995) Nonlinear and adaptive control design. Wiley, New York
Ding T-F, Ge M-F, Xiong C-H, Park JH, Li M (2021) Second-order bipartite consensus for networked robotic systems with quantized-data interactions and time-varying transmission delays. ISA Trans 108:178–187
Dong X, Zhou Y, Ren Z, Zhong Y (2016) Time-varying formation control for unmanned aerial vehicles with switching interaction topologies. Control Eng Pract 46:26–36
Dong G, Li H, Ma H, Lu R (2020) Finite-time consensus tracking neural network FTC of multi-agent systems. IEEE Trans Neural Netw Learn Syst 32(2):653–662
Edwards C, Spurgeon SK (2002) Dynamic sliding mode control and output feedback. In: Sliding mode control in engineering, 1st edn. CRC Press, New York
Erdős P, Rényi A (1960) On the evolution of random graphs. Publ Math Inst Hung Acad Sci 5(1):17–60
Euston M, Coote P, Mahony R, Kim J, Hamel T (2008) A complementary filter for attitude estimation of a fixed-wing UAV. IEEE/RSJ Int Conf Intell Robots Syst 2008:340–345
Ezal K, Pan Z, Kokotovic PV (2000) Locally optimal and robust backstepping design. IEEE Trans Automat Contr 45(2):260–271
Ferrari-Trecate G, Galbusera L, Marciandi MPE, Scattolini R (2009) Model predictive control schemes for consensus in multi-agent systems with single-and double-integrator dynamics. IEEE Trans Automat Contr 54(11):2560–2572
Fu J, Wen G, Yu W, Ding Z (2017) Finite-time consensus for second-order multi-agent systems with input saturation. IEEE Circuits Syst II Express Briefs 65(11):1758–1762
Fu W, Qin J, Wu J, Zheng WX, Kang Y (2020) Interval consensus over random networks. Automatica 111:108603
Glorennec PY (1996) Fuzzy logic-based navigation for an autonomous robot. IFAC Proc 29(4):45–49
Goldin D, Raisch J (2010) Controllability of second order leader-follower systems. IFAC Proc 43(19):233–238
Gong P (2016) Distributed consensus of non-linear fractional-order multi-agent systems with directed topologies. IET Control Theory Appl 10(18):2515–2525
Gravelle E, Martínez S (2014) Quantized distributed load balancing with capacity constraints in 53rd IEEE Conference on Decision and Control, pp 3866–3871
Guo J, Li L, Li K, Wang R (2013) An adaptive fuzzy-sliding lateral control strategy of automated vehicles based on vision navigation. Veh Syst Dyn 51(10):1502–1517
Han T, Guan Z-H, Liao R-Q, Chen J, Chi M, He D-X (2017a) Distributed finite-time formation tracking control of multi-agent systems via FTSMC approach. IET Control Theory Appl 11(15):2585–2590
Han T, Guan Z-H, Chi M, Hu B, Li T, Zhang X-H (2017b) Multi-formation control of nonlinear leader-following multi-agent systems. ISA Trans 69:140–147
Hatano Y, Mesbahi M (2005) Agreement over random networks. IEEE Trans Automat Contr 50(11):1867–1872
He W, Cao J (2011) Consensus control for high-order multi-agent systems. IET Control Theory Appl 5(1):231–238
He W, Zhang B, Han Q-L, Qian F, Kurths J, Cao J (2016) Leader-following consensus of nonlinear multiagent systems with stochastic sampling. IEEE Trans Cybern 47(2):327–338
He W, Xu C, Han Q-L, Qian F, Lang Z (2017) Finite-time $\mathcal L _ 2 $ leader-follower consensus of networked Euler-Lagrange systems with external disturbances. IEEE Trans Syst Man Cybern Syst 48(11):1920–1928
Hill J, Szewczyk R, Woo A, Hollar S, Culler D, Pister K (2000) System architecture directions for networked sensors. ACM Sigplan Not 35(11):93–104
Hou Z-G, Cheng L, Tan M (2009) Decentralized robust adaptive control for the multiagent system consensus problem using neural networks. IEEE Trans. Syst. Man Cybern. Part B 39(3):636–647
Hu G (2012) Robust consensus tracking of a class of second-order multi-agent dynamic systems. Syst Control Lett 61(1):134–142
Hu J (2014) Bipartite consensus control of multiagent systems on coopetition networks. Abstract Appl Anal 2014:1–9
Hu J, Li S, Zhao C et al (2017) Finite-time consensus for multi UAV system with collision avoidance. IEEE Int Conf Unmanned Syst (ICUS) 2017:517–522
Huang Z (2017) Consensus control of multiple-quadcopter systems under communication delays
Huang M, Manton JH (2009) Stochastic consensus seeking with noisy and directed inter-agent communication: fixed and randomly varying topologies. IEEE Trans Automat Contr 55(1):235–241
Ioannou P, Kokotovic P (1985) Decentralized adaptive control of interconnected systems with reduced-order models. Automatica 21(4):401–412
Ismail ZH and Sariff N (2018) A survey and analysis of cooperative multi-agent robot systems: challenges and directions in Applications of Mobile Robots IntechOpen
Jadbabaie A, Lin J, Morse AS (2003) Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans Automat Contr 48(6):988–1001
Kashyap A, Başar T, Srikant R (2007) Quantized consensus. Automatica 43(7):1192–1203
Kingston DB, Ren W, and Beard RW (2005) Consensus algorithms are input-to-state stable,” in Proceedings of the 2005, American Control Conference, 2005, pp 1686–1690
Klotz JR, Kan Z, Shea JM, Pasiliao EL, Dixon WE (2014) Asymptotic synchronization of a leader-follower network of uncertain Euler-Lagrange systems. IEEE Trans Control Netw Syst 2(2):174–182
Lafferriere G, Williams A, Caughman J, Veerman JJP (2005) Decentralized control of vehicle formations. Syst Control Lett 54(9):899–910
Lavaei J, Murray RM (2011) Quantized consensus by means of gossip algorithm. IEEE Trans Automat Contr 57(1):19–32
Li M, Deng F (2021) Cluster consensus of nonlinear multi-agent systems with Markovian switching topologies and communication noises. ISA Trans 116:113–120
Li Y, Tan C (2019) A survey of the consensus for multi-agent systems. Syst Sci Control Eng 7(1):468–482
Li S, Wang X (2013) Finite-time consensus and collision avoidance control algorithms for multiple AUVs. Automatica 49(11):3359–3367
Li D, Liu Q, Wang X, Yin Z (2014) Quantized consensus over directed networks with switching topologies. Syst Control Lett 65:13–22
Li X, Chen MZQ, Su H (2018) Quantized consensus of multi-agent networks with sampled data and Markovian interaction links. IEEE Trans Cybern 49(5):1816–1825
Li D, Ge SS, He W, Ma G, Xie L (2019) Multilayer formation control of multi-agent systems. Automatica 109:108558
Li X, Yu Z, Li Z, Wu N (2021) Group consensus via pinning control for a class of heterogeneous multi-agent systems with input constraints. Inf Sci (ny) 542:247–262
Liang S, Wang F, Liu Z, Chen Z (2021) Necessary and sufficient conditions for leader-follower consensus of discrete-time multiagent systems with smart leader. IEEE Trans Syst Man Cybern Syst. https://doi.org/10.1109/TSMC.2021.3055578
Lin P, Jia Y, Li L (2008) Distributed robust H∞ consensus control in directed networks of agents with time-delay. Syst Control Lett 57(8):643–653
Lin J, Morse AS, Anderson BDO (2003) The multi-agent rendezvous problem,” in 42nd IEEE International Conference on Decision and Control (IEEE Cat. No. 03CH37475), vol 2, pp 1508–1513
Liu X, He S, Lu P, Liu H, Du C (2021) Finite-time consensus for multi-agent systems with nonlinear dynamics under Euler digraph via pinning control. Int J Syst Sci 52(8):1664–1674
Lu X, Chen S, Lü J (2013) Finite-time tracking for double-integrator multi-agent systems with bounded control input. IET Control Theory Appl 7(11):1562–1573
Lu K, Liu Z, Lai G, Chen CLP, Zhang Y (2019) Adaptive consensus tracking control of uncertain nonlinear multiagent systems with predefined accuracy. IEEE Trans Cybern. https://doi.org/10.1109/TCYB.2019.2933436.
Ma Z, Wang Y, Li X (2016) Cluster-delay consensus in first-order multi-agent systems with nonlinear dynamics. Nonlinear Dyn 83(3):1303–1310
Ma J, Ji H, Sun D, Feng G (2018) An approach to quantized consensus of continuous-time linear multi-agent systems. Automatica 91:98–104
Mesbahi M, Egerstedt M (2010) Graph theoretic methods in multiagent networks, vol 33. Princeton University Press, Princeton
Moreau L (2005) Stability of multiagent systems with time-dependent communication links. IEEE Trans Automat Contr 50(2):169–182
Morse AS, Kanellakopoulos I, Kokotovi PV, Morse AS (1991) Systematic design of adaptive controllers for feedback linearizable systems. IEEE Trans Automat Contr 36(11):1241–1253
Nguyen DH (2016) Reduced-order distributed consensus controller design via edge dynamics. IEEE Trans Automat Contr 62(1):475–480
Oh K-K, Park M-C, Ahn H-S (2015) A survey of multi-agent formation control. Automatica 53:424–440
Olfati-Saber R (2006) Flocking for multi-agent dynamic systems: algorithms and theory. IEEE Trans Automat Contr 51(3):401–420
Olfati-Saber R, Murray RM (2004) Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans Automat Contr 49(9):1520–1533
Olfati-Saber R, Shamma JS (2005) Consensus filters for sensor networks and distributed sensor fusion in Proceedings of the 44th IEEE Conference on Decision and Control pp 6698–6703
Olfati-Saber R, Franco E, Frazzoli E, Shamma JS (2006) Belief consensus and distributed hypothesis testing in sensor networks. In: Antsaklis PJ, Tabuada P (eds) Networked embedded sensing and control. Lecture notes in control and information science, vol 331. Springer, Berlin, Heidelberg
Parks P (1966) Liapunov redesign of model reference adaptive control systems. IEEE Trans Automat Contr 11(3):362–367
Partridge BL (1984) The chorus-line hypothesis of maneuver in avian flocks. Nature 309(6):344–345
Patterson S, McGlohon N, Dyagilev K (2016) Optimal k-leader selection for coherence and convergence rate in one-dimensional networks. IEEE Trans Control Netw Syst 4(3):523–532
Polycarpou MM, Ioannou PA (1991) Identification and control of nonlinear systems using neural network models: design and stability analysis University of Southern Calif
Prasanna S, Rao S (2012) An overview of wireless sensor networks applications and security. Int. J. Soft Comput. Eng. (IJSCE) 2231:2307
Puccinelli D, Haenggi M (2005) Wireless sensor networks: applications and challenges of ubiquitous sensing. IEEE Circuits Syst Mag 5(3):19–31
Qin J, Yu C (2013) Cluster consensus control of generic linear multi-agent systems under directed topology with acyclic partition. Automatica 49(9):2898–2905
Qin J, Fu W, Zheng WX, Gao H (2016) On the bipartite consensus for generic linear multiagent systems with input saturation. IEEE Trans Cybern 47(8):1948–1958
Qin J, Zheng WX, Gao H (2010) Sampled-data consensus for multiple agents with discrete second-order dynamics,” in 49th IEEE Conference on Decision and Control (CDC), pp 1391–1396
Ren W, Atkins E (2007) Distributed multi-vehicle coordinated control via local information exchange. Int J Robust Nonlinear Control IFAC-Affiliated J 17(10–11):1002–1033
Ren W, Beard RW (2005) Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Trans Automat Contr 50(5):655–661
Ren W, Beard RW (2008) Distributed consensus in multi-vehicle cooperative control, vol 27. Springer, London
Ren W, Beard RW, Atkins EM (2007a) Information consensus in multivehicle cooperative control. IEEE Control Syst Mag 27(2):71–82
Ren W, Moore KL, Chen Y (2007b) High-order and model reference consensus algorithms in cooperative control of multivehicle systems. ASME J Dyn Syst Measure Control 129(5):678–688
Ren W, Chao H, Bourgeous W, Sorensen N, Chen Y (2008) Experimental validation of consensus algorithms for multivehicle cooperative control. IEEE Trans Control Syst Technol 16(4):745–752
Ren W, Beard RW (2008) Consensus algorithms for double-integrator dynamics. In: Distributed consensus in multi-vehicle cooperative control. Communications and control engineering. Springer, London
Ren W, Moore K, Chen Y (2006) High-order consensus algorithms in cooperative vehicle systems in 2006 IEEE International Conference on Networking, Sensing and Control pp 457–462
Reynolds CW (1987) “Flocks, herds and schools: a distributed behavioral model,” in Proceedings of the 14th annual conference on Computer graphics and interactive techniques pp 25–34
Rong L, Su P, Gao H, Xu S (2021a) Distributed quantized consensus with recursive channel filters over directed networks. IEEE Trans Circuits Syst II Express Briefs. https://doi.org/10.1109/TCSII.2021.3099875
Rong L, Liu X, Jiang G-P, Xu S (2021b) Observer-based multiagent bipartite consensus with deterministic disturbances and antagonistic interactions. IEEE Trans Cybern. https://doi.org/10.1109/TCYB.2021.3087645
Roy S (2015) Scaled consensus. Automatica 51:259–262
Runolfsson T (1990) “Stationary risk-sensitive LQG control and its relation to LQG and H-infinity control,” in 29th IEEE Conference on Decision and Control pp 1018–1023
Schenato L, Gamba G (2007) A distributed consensus protocol for clock synchronization in wireless sensor network in 2007 46th IEEE Conference on Decision and Control, pp 2289–2294
Shang Y (2010) Multi-agent coordination in directed moving neighbourhood random networks. Chin Phys B 19(7):70201
Shang Y (2018) Finite-time scaled consensus in discrete-time networks of agents. Asian J Control 20(6):2351–2356
Shang Y (2019) Scaled consensus of switched multi-agent systems. IMA J Math Control Inf 36(2):639–657
Shang Y (2020a) On the structural balance dynamics under perceived sentiment. Bull Iran Math Soc 46(3):717–724
Shang Y (2020) Resilient consensus in multi-agent systems with state constraints. Automatica 122:109288
Shang L, Cai M (2021) Adaptive practical fast finite-time consensus protocols for high-order nonlinear multi-agent systems with full state constraints. IEEE Access. https://doi.org/10.1109/ACCESS.2021.3085843
Shang Y, Ye Y (2017) Fixed-time group tracking control with unknown inherent nonlinear dynamics. IEEE Access 5:12833–12842
Shang Y (2020) Resilient cluster consensus of multiagent systems IEEE Trans Syst Man Cybern Syst
Shang Y, Chen B, Lin C (2018) Consensus tracking control for distributed nonlinear multiagent systems via adaptive neural backstepping approach. IEEE Trans Syst Man Cybern Syst 50(7):2436–2444
Shi C-X, Yang G-H (2018) Robust consensus control for a class of multi-agent systems via distributed PID algorithm and weighted edge dynamics. Appl Math Comput 316:73–88
Sun Y, Ji Z, Qi Q, Ma H (2019) Bipartite consensus of multi-agent systems with intermittent interaction. IEEE Access 7:130300–130311
Sun J, Wang Z, Rong N (2020) Sampled-data consensus of multiagent systems with switching jointly connected topologies via time-varying Lyapunov function approach. Int J Robust Nonlinear Control 30(14):5369–5385
Sundaram S, Hadjicostis CN (2007) Finite-time distributed consensus in graphs with time-invariant topologies. Am Control Conf 2007:711–716
Tahbaz-Salehi A, Jadbabaie A (2008) A necessary and sufficient condition for consensus over random networks. IEEE Trans Automat Contr 53(3):791–795
Tanner HG, Jadbabaie A and Pappas GJ (2003) Flocking in fixed and switching networks. IEEE Transactions on Automatic Control 52(5):863–868,
Tian L, Ji Z, Hou T, Liu K (2018) Bipartite consensus on coopetition networks with time-varying delays. IEEE Access 6:10169–10178
Valcher ME, Misra P (2014) On the consensus and bipartite consensus in high-order multi-agent dynamical systems with antagonistic interactions. Syst Control Lett 66:94–103
Vermunt JK, Magidson J (2002) Latent class cluster analysis. Appl Latent Cl Anal 11(89–106):60
Vicsek T, Czirók A, Ben-Jacob E, Cohen I, Shochet O (1995) Novel type of phase transition in a system of self-driven particles. Phys Rev Lett 75(6):1226
Wang Q (2017) Scaled consensus of multi-agent systems with output saturation. J Franklin Inst 354(14):6190–6199
Wang X, Hong Y (2008) Finite-time consensus for multi-agent networks with second-order agent dynamics. IFAC Proc 41(2):15185–15190
Wang L, Xiao F (2010) Finite-time consensus problems for networks of dynamic agents. IEEE Trans Automat Contr 55(4):950–955
Wang J, Rad AB, Chan PT (2001) Indirect adaptive fuzzy sliding mode control: Part I: fuzzy switching. Fuzzy Sets Syst 122(1):21–30
Wang J, Duan Z, Li Z, Wen G (2013) Distributed H∞ and H 2 consensus control in directed networks. IET Control Theory Appl 8(3):193–201
Wang X, Li S, Yu X, Yang J (2016) Distributed active anti-disturbance consensus for leader-follower higher-order multi-agent systems with mismatched disturbances. IEEE Trans Automat Contr 62(11):5795–5801
Wang X, Li S, Chen MZQ (2017) Composite backstepping consensus algorithms of leader–follower higher-order nonlinear multiagent systems subject to mismatched disturbances. IEEE Trans Cybern 48(6):1935–1946
West DB (1996) Introduction to graph theory, vol 2. Prentice hall Upper Saddle River, NJ
Wood AD, Stankovic JA (2002) Denial of service in sensor networks. Computer 35(10):54–62
Wu Y, Wang Z, Ding S, Zhang H (2018) Leader–follower consensus of multi-agent systems in directed networks with actuator faults. Neurocomputing 275:1177–1185
Xiao F, Wang L (2007) Consensus problems for high-dimensional multi-agent systems. IET Control Theory Appl 1(3):830–837
Xie G, Wang L (2007) Consensus control for a class of networks of dynamic agents. Int J Robust Nonlinear Control IFAC-Affil J 17(10–11):941–959
Yi J, Wang W, Zhao D, Liu X (2005) Cascade sliding-mode controller for large-scale underactuated systems. IEEE/RSJ Int Conf Intell Robots Syst 2005:301–306
Yi J-W, Wang Y-W, Xiao J-W (2014) Consensus in Markovian jump second-order multi-agent systems with random communication delay. IET Control Theory Appl 8(16):1666–1675
Yick J, Mukherjee B, Ghosal D (2008) Wireless sensor network survey. Comput Netw 52(12):2292–2330
Yu W, Wang H, Hong H, Wen G (2017) Distributed cooperative anti-disturbance control of multi-agent systems: an overview. Sci China Inf Sci 60(11):110202
Zhan J, Li X (2017) Cluster consensus in networks of agents with weighted cooperative–competitive interactions. IEEE Trans Circuits Syst II Express Briefs 65(2):241–245
Zhang H, Chen J (2014) Bipartite consensus of linear multi-agent systems over signed digraphs: an output feedback control approach. IFAC Proc 47(3):4681–4686
Zhang H, Sundaram S (2012) Robustness of information diffusion algorithms to locally bounded adversaries. Am Control Conf (ACC) 2012:5855–5861
Zhang X, Liu L, Feng G (2015) Leader–follower consensus of time-varying nonlinear multi-agent systems. Automatica 52:8–14
Zhang Z, Zhang L, Hao F, Wang L (2016) Leader-following consensus for linear and Lipschitz nonlinear multiagent systems with quantized communication. IEEE Trans Cybern 47(8):1970–1982
Zhang Z, Shi Y, Zhang Z, Yan W (2018) New results on sliding-mode control for Takagi-Sugeno fuzzy multiagent systems. IEEE Trans Cybern 49(5):1592–1604
Zhang Z, Chen S, Su H (2019) Scaled consensus of second-order nonlinear multiagent systems with time-varying delays via aperiodically intermittent control. IEEE Trans Cybern 50:3503
Zhang J, Zhang H, Sun S, Gao Z (2021) Leader-follower consensus control for linear multi-agent systems by fully distributed edge-event-triggered adaptive strategies. Inf Sci (ny) 555:314–338
Zhang D, Feng G (2021) A new switched system approach to leader-follower consensus of heterogeneous linear multiagent systems with dos attack. IEEE Trans Syst Man Cybern Syst 51(2):1258–1266
Zhang W, Tang Y, Han Q-L, Liu Y (2020) Sampled-data consensus of linear time-varying multiagent networks with time-varying topologies. IEEE Trans Cybern. https://doi.org/10.1109/TCYB.2020.2977720
Zhao Y, Duan Z, Wen G, Chen G (2012) Distributed H∞ consensus of multi-agent systems: a performance region-based approach. Int J Control 85(3):332–341
Zhao L, Jia Y, Yu J, Du J (2017) H∞ sliding mode based scaled consensus control for linear multi-agent systems with disturbances. Appl Math Comput 292:375–389
Zhao H, Peng L, Yu H (2022) Quantized model-free adaptive iterative learning bipartite consensus tracking for unknown nonlinear multi-agent systems. Appl Math Comput 412:126582
Zhiqiang Z, Zhicheng Z, Yijing W (2015) Finite-time consensus of double integrator multi-agent systems subject to input saturation in 2015 34th Chinese Control Conference (CCC), 2015, pp 7280–7284
Zhu J, Tian Y-P, Kuang J (2009) On the general consensus protocol of multi-agent systems with double-integrator dynamics. Linear Algebra Appl 431(5–7):701–715
Zhu J, Lu J, Yu X (2012) Flocking of multi-agent non-holonomic systems with proximity graphs. C IEEE Trans Circuits Syst I Regul Pap 60(1):199–210
Zuo Z, Tian B, Defoort M, Ding Z (2017) Fixed-time consensus tracking for multiagent systems with high-order integrator dynamics. IEEE Trans Automat Contr 63(2):563–570
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Amirkhani, A., Barshooi, A.H. Consensus in multi-agent systems: a review. Artif Intell Rev 55, 3897–3935 (2022). https://doi.org/10.1007/s10462-021-10097-x
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10462-021-10097-x