
Abstract
We study the geodesic distance induced by right-invariant metrics on the group \({\text {Diff}}_\text {c}(\mathcal {M})\) of compactly supported diffeomorphisms of a manifold \(\mathcal {M}\) and show that it vanishes for the critical Sobolev norms \(W^{s,n/s}\), where n is the dimension of \(\mathcal {M}\) and \(s\in (0,1)\). This completes the proof that the geodesic distance induced by \(W^{s,p}\) vanishes if \(sp\le n\) and \(s<1\), and is positive otherwise. The proof is achieved by combining the techniques of two recent papers—(Jerrard and Maor in Ann Glob Anal Geom 55(4):631–656, 2019) by the authors, which treated the subcritical case, and Bauer et al. (Vanishing distance phenomena and the geometric approach to SQG, 2018. arXiv:1805.04401), which treated the critical one-dimensional case.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction, preliminaries and main result
The geometry of different diffeomorphism groups (e.g., compactly supported, symplectic, volume-preserving) with respect to various right-invariant metrics has a long history (see, e.g., [3, 5, 7, 9]). One of the basic questions about these geometries is whether the geodesic distance induced by a given norm on the associated Lie algebra of the group actually generates a metric space structure on the group. This may fail if two distinct diffeomorphisms can be connected with paths of arbitrary short lengths.
In this paper, we complete the full characterization of this vanishing geodesic distance phenomenon on the group of compactly supported diffeomorphisms of a manifold, with respect to Sobolev norms \(W^{s,p}\) on its Lie algebra of vector fields. This study started in [9] and continued in [1, 2], where (among other results) the threshold \(s=1/p\) between positive and vanishing geodesic distance was identified for one-dimensional manifolds. In a recent paper [3], it was shown that the geodesic distance vanishes in this critical space, completing the characterization in the one-dimensional case. Virtually simultaneously with [3], in [8] the authors identified the critical space in the n-dimensional case, namely \(s=\min (n/p,1)\), leaving the case \(sp= n\), \(s<1\) open. In this paper, we combine the techniques of [3, 8] to show that the geodesic distance vanishes in this case, thus completing the classification of vanishing geodesic distance phenomenon for compactly supported diffeomorphisms.
Setting Let \((\mathcal {M},\mathfrak {g})\) be a Riemannian manifold of bounded geometry; that is, \((\mathcal {M},\mathfrak {g})\) has a positive injectivity radius and all the covariant derivatives of the curvature are bounded: \(\Vert \nabla ^i R\Vert _\mathfrak {g}< C_i\) for \(i\ge 0\). We denote by \({\text {Diff}}_\text {c}(\mathcal {M})\) the group of compactly supported diffeomorphisms of \(\mathcal {M}\), that is the diffeomorphisms \(\varphi \) for which the closure of \(\{\varphi (x)\ne x\}\) is compact, and by \(\Gamma _\mathrm{c}(T\mathcal {M})\) the Lie algebra of compactly supported vector fields on \(\mathcal {M}\), the tangent space of \({\text {Diff}}_\text {c}(\mathcal {M})\) at the identity.
Given a norm \(\Vert \cdot \Vert _A\) on \(\Gamma _\mathrm{c}(T\mathcal {M})\), the length of a smooth path \(\varphi :[0,1]\rightarrow {\text {Diff}}_\text {c}(\mathcal {M})\) is defined by
Note that from the vector fields \(\{u_t\}_{t\in [0,1]}\), and the initial condition \(\varphi _0\), the path \(\varphi \) can be recovered via standard ODE theory.
The above formula for lengths induces the geodesic distance between \(\varphi _0,\varphi _1\in {\text {Diff}}_\text {c}(\mathcal {M})\) in a standard way by
Note that \({\text {dist}}_A\) forms a semi-metric on \({\text {Diff}}_\text {c}(\mathcal {M})\); that is, it satisfies the triangle inequality but may fail to be positive. This paper is concerned exactly with this phenomenon—for which Sobolev norms (defined below) the geodesic distance induces a metric space structure on \({\text {Diff}}_\text {c}(\mathcal {M})\).
\({\text {dist}}_A\) is, in fact, the geodesic distance of the right-invariant Finsler metric on \({\text {Diff}}_\text {c}(\mathcal {M})\) induced by \(\Vert \cdot \Vert _{A}\), which is defined as
for every \(\varphi \in {\text {Diff}}_\text {c}(\mathcal {M})\) and \(X\in T_\varphi {\text {Diff}}_\text {c}(\mathcal {M})\). If \(\Vert \cdot \Vert _A\) is induced by an inner product, it defines a Riemannian metric on \({\text {Diff}}_\text {c}(\mathcal {M})\) in a similar manner; many well-known PDEs are, in fact, the geodesic equations of such Riemannian metrics. See [1] for more details. The right invariance is inherited by \({\text {dist}}_A\), as summarized in the following lemma:
Lemma 1.1
(Right invariance) For \(\psi ,\varphi _0,\varphi _1\in {\text {Diff}}_\text {c}(\mathcal {M})\), we have
In particular,
and
Proof
See [8, Lemma 2.1]. \(\square \)
In this paper, we are interested in fractional Sobolev \(W^{s,p}\)-norms defined as follows:
Definition 1.2
For \(0<s<1\) and \(1\le p<\infty \), the \(W^{s,p}\)-norm of a function \(f\in L^p(\mathbb {R}^n)\) is given by
Given a Riemannian manifold \((\mathcal {M},\mathfrak {g})\) of bounded geometry, this norm can be extended to \(\Gamma _\mathrm{c}(T\mathcal {M})\) using a trivialization by normal coordinate patches on \(\mathcal {M}\) (see [2, Section 2.2] for details). We will denote the induced geodesic distance on \({\text {Diff}}_\mathrm{c}(\mathcal {M})\) by \({\text {dist}}_{s,p}\). Different choices of charts result in equivalent metrics, and therefore the question of vanishing geodesic distance is independent of these choices.
Instead of using Definition 1.2 directly, we will bound the \(W^{s,p}\)-norm using the following interpolation inequalities:
Proposition 1.3
(fractional Gagliardo–Nirenberg interpolation inequalities) Assume that \(1<p<\infty \). For every \(f\in W^{1,p}(\mathbb {R}^n)\) and \(s\in (0,1)\),
and
For a proof, see [4, Corollary 3.2]. These are the only properties of the \(W^{s,p}\)-norm that will be used in this paper.
Main results The main result of this paper is the following:
Theorem 1.4
Let \((\mathcal {M},\mathfrak {g})\) be an n-dimensional Riemannian manifold of bounded geometry, and \(p\in (n,\infty )\). Then, \({\text {dist}}_{n/p,p}(\varphi _0,\varphi _1)= 0\) whenever \(\varphi _0,\varphi _1\) belong to the same path-connected component of \({\text {Diff}}_\text {c}(\mathcal {M})\).
Combining this result with previous results, which are summed up in [8, Theorem 2.4], we obtain the following full characterization of the vanishing geodesic distance phenomenon on compactly supported diffeomorphism groups:
Theorem 1.5
Let \((\mathcal {M},\mathfrak {g})\) be an n-dimensional Riemannian manifold of bounded geometry. Then, for any \(p\in [1,\infty )\), the induced \(W^{s,p}\)-geodesic distance vanishes on any path-connected component of \({\text {Diff}}_\text {c}(\mathcal {M})\) if \(sp\le n\) and \(s<1\) and is strictly positive otherwise.
When \(s>n/p\), then the Sobolev embedding \(W^{s,p}\subset L^\infty \) implies that for every path \(\{\varphi _t\}_{t\in [0,1]}\) between \(\varphi _0,\varphi _1\in {\text {Diff}}_\text {c}(\mathcal {M})\), and every \(x\in \mathcal {M}\),
hence, it is impossible to transport even a single point at a low cost. On the other hand, when \(sp \le n\), one expects to be able to transport small volumes over large distances at a small cost, using vector fields \(u_t\) with \(\Vert u_t\Vert _\infty \approx 1\) but \(\Vert u_t\Vert _{s,p}\ll 1\). Indeed, such vector fields are at the heart of all vanishing geodesic distance constructions on \({\text {Diff}}_\text {c}(\mathcal {M})\) [1, 3, 8, 9].
The main difficulty in proving Theorem 1.4, compared with the subcritical case \(s<\min \left\{ n/p,1\right\} \) proved in [8], is that such vector fields are quite rigid in the critical case \(sp=n\). In the subcritical case, on the other hand, any function \(f\in W^{s,p}(\mathbb {R}^n)\) can be rescaled \(f_\lambda (x) := f( x/\lambda )\) with \(\lambda \ll 1\) to obtain a function with the same \(L^\infty \)-norm but arbitrary small \(W^{s,p}\)-norm. This rigidity in the critical case makes it difficult to control the endpoint of a path \(\varphi _t\) starting at \(\varphi _0\) and flowing along a vector field \(u_t\) with these properties, and therefore it is difficult to construct arbitrary short paths between two fixed diffeomorphisms \(\varphi _0,\varphi _1\).
In [3], this problem is circumvented by using the notion of displacement energy defined in [5]. As described in the next section, they show that the geodesic distance vanishes if there exists an open set with zero displacement energy—that is, if it is possible to transport the set so it does not intersect itself, for an arbitrary small cost.Footnote 1 This enabled them to prove Theorem 1.4 in the one-dimensional case. In this paper, we combine this approach of using the displacement energy with the ideas used in [8] to construct short paths in the subcritical case, to prove the vanishing of the geodesic distance in the critical case in every dimension.
The condition \(s<1\) in Theorem 1.4 is related to change, rather than transportation, of volumes. That is, when \(s\ge 1\) the \(W^{s,p}\)-norm detects any volume change, whereas when \(s<1\) it is possible to have significant volume changes at a small cost, provided that no point moves very far. When \(n>1\), this plays an important role in constructing short paths, as will be clear from the proof.
Theorem 1.4 is stronger than the main theorem of [8], as the latter proves vanishing geodesic distance only in the subcritical case. Moreover, the proof of Theorem 1.4 is significantly shorter, due to the fact that it is no longer needed to control the endpoints of the short paths considered. On the other hand, the proof of [8], being more direct, has the advantage of showing explicitly how two diffeomorphisms can be connected with arbitrary short paths, so in some sense it is more revealing or instructive.
2 Displacement energy
Definition 2.1
The displacement energy of a set \({V}\subset \mathcal {M}\) with respect to the \(W^{s,p}\)-induced geodesic distance is defined by
In this section, we use [3, Theorem 1] (see also [10, Remark 7], both generalize results of [5]), to show that the \(W^{s,p}\)-geodesic distance vanishes if and only if there exists an open set \({V}\subset \mathcal {M}\) with \(E({V}) = 0\).
We start with the following lemma (which is almost identical to Step 2 in the proof of [3, Theorem 2]):
Lemma 2.2
For every \(s\in (0,1)\) and \(p\in [1,\infty )\) and for every \(\varphi \in {\text {Diff}}_\text {c}(\mathcal {M})\), the left multiplication operator \(L_\varphi : {\text {Diff}}_\text {c}(\mathcal {M})\rightarrow {\text {Diff}}_\text {c}(\mathcal {M})\), \(L_\varphi (\psi ) = \varphi \circ \psi \) is smooth and Lipschitz with respect to \({\text {dist}}_{s,p}\).
Proof
The smoothness of \(L_\varphi \) is obvious. We now prove that it is Lipschitz. First, let \(X\in \Gamma _\mathrm{c}(T\mathcal {M})\). Then,
for some \(C_\varphi >0\), by the continuity of multiplications and compositions, see Theorems 4.2.2 and 4.3.2 in [11]. Now, let \(\psi _0,\psi _1 \in {\text {Diff}}_\text {c}(\mathcal {M})\), and let \(\Psi :[0,1]\rightarrow {\text {Diff}}_\text {c}(\mathcal {M})\) be a path between them. Then, \(\varphi \circ \Psi \) is a path between \(\varphi \circ \psi _0\) and \(\varphi \circ \psi _1\), and
Taking the infimum on \(\Psi \), we obtain
which completes the proof. \(\square \)
Denote by \({\text {Diff}}_0(\mathcal {M})\) the connected component of the identity, i.e., all diffeomorphisms in \({\text {Diff}}_\text {c}(\mathcal {M})\) for which there exists a curve between them and \({\text {Id}}\). \({\text {Diff}}_0(\mathcal {M})\) is a simple group [6]. This fact, together with Lemma 2.2, and the fact that \({\text {Diff}}_\text {c}({V})\) is non-Abelian for any open V, implies that the following corollary of [3, Theorem 1] holds:
Proposition 2.3
There exists \(\varphi \in {\text {Diff}}_0(\mathcal {M})\), \(\varphi \ne {\text {Id}}\), such that \({\text {dist}}_{s,p}({\text {Id}},\varphi ) = 0\) if any only if there exists an open set V such that \(E({V})=0\). If such \(\varphi \) exists, then \({\text {dist}}_{s,p}\) is identically zero on \({\text {Diff}}_0(\mathcal {M})\).
3 Proof of Theorem 1.4
The case \(n=1\), \(p=2\) was proved in [3, Theorem 2]. Their proof holds for every \(p>1\), so here we prove for the case \(n>1\). It is enough to prove the result for \(\mathbb {R}^n\)—indeed, for a general manifold of bounded geometry \((\mathcal {M},\mathfrak {g})\), one can embed the following \(\mathbb {R}^n\) construction into a single coordinate chart, used in the definition of the induced \(W^{s,p}\)-geodesic distance on \(\mathcal {M}\).
Since we will often split \(\mathbb {R}^n = \mathbb {R}\times \mathbb {R}^{n-1}\), it is convenient to write \(m=n-1\). We will denote the standard coordinates on \(\mathbb {R}^n\) by (x, y), where \(x\in \mathbb {R}\) and \(y\in \mathbb {R}^m\).
In the following lemma, we construct functions \(\xi _k\in W^{n/p,p}(\mathbb {R}^n)\), with \(\Vert \xi _k\Vert _\infty = 1\) and \(\Vert \xi _k\Vert _{n/p,p}\rightarrow 0\), for \(p>n\). That is, we bound the capacity of small balls in the critical Sobolev space \(W^{n/p,p}(\mathbb {R}^n)\).
Lemma 3.1
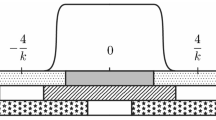
Let \(sp= n>1\), \(s<1\), and let \((\lambda _k)_{k\in \mathbb {N}}\) be a sequence of positive numbers, \(\lambda _k\ll e^{-k^p}\). Then, there exists a sequence \((\xi _k)_{k\in \mathbb {N}}\) of functions \(\xi _k:\mathbb {R}^n\rightarrow [0,1]\) such that
-
1.
\(\xi _k\equiv 1\) on \([-\lambda _k,\lambda _k]^n\)
-
2.
\({\text {supp}}\xi _k \subset [-1,1]^n\)
-
3.
\(k^{n-1}\Vert \xi _k\Vert _{s,p} \rightarrow 0\).
Proof
Let \(r_k = \sqrt{n}\lambda _k\), so that \([-\lambda _k,\lambda _k]^n\) is contained in a ball of radius \(r_k\). Consider the function
Then,
and \(|d\xi _k|\le C \log (1/r_k)^{-1}/|x|\) for \(|x|\in (r_k,1)\), and therefore
Hence,
Therefore, by Proposition 1.3, we have
Note that the above calculation is not optimal (one expects to be able to obtain \(\Vert \xi _k\Vert _{{n/p},p}^p\approx \log (1/\lambda _k)^{1-p}\)), but this simple construction is sufficient for our purposes.
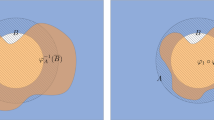
General strategy of the proof We now proceed to the proof of Theorem 1.4. We prove it using Proposition 2.3: We show that there exists an open set \(U\subset \mathbb {R}^n\) whose displacement energy with respect to the \(W^{n/p,p}\) norm is zero. That is, we show that there exists a sequence \(\Phi _k\in {\text {Diff}}_\text {c}(\mathbb {R}^n)\) such that \(\Phi _k(U) \cap U= \emptyset \) and \({\text {dist}}_{s,p} ({\text {Id}},\Phi _k) \rightarrow 0\). Specifically, we show this for the open set \(U=(0,1)^n\). In the rest of this section, we construct these diffeomorphisms \(\Phi _k\).
A sketch of the construction of the diffeomorphisms\( \Phi _k\) Fix \(k\in \mathbb {N}\). We consider \((0,1)^m\) as a union of sets \(L_I\), \(I=1,\ldots 2^m\), each \(L_I\) is a union of \(\approx k^m\) disjoint cubes of diameter \(\approx 1/k\). The main part of the proof consists of constructing diffeomorphisms \(\Phi _k^I = (\phi _k^I(x,y) ,y)\), which satisfy
We then have that \(\Phi _k = \Phi _k^{{2^m}} \circ \ldots \circ \Phi _k^1\) is the desired map. The construction of \(\Phi _k^I\) is carried out in three stages:
where \(\Psi _I\) and \(\Theta _I\) (whose dependence of k is omitted in order to simplify the notation) are as follows:
-
1.
\(\Psi _I(x,y) = (x,\psi _I(x,y)) \) squeezes each cube in \(L_I\) to diameter \(\lambda _k \ll e^{-k^p}\). Since \(s<1\), this can be obtained at a small cost.
-
2.
\(\Theta _I(x,y) = (\theta _I(x,y) ,y)\) satisfies \(\theta _I(0,y) = 1\) whenever y is in one of the squeezed cubes. Since \(sp=n\), such a transport is possible at a low cost, but only if the volume of the transported points at every time is small enough; this is the reason for the squeezing stage. \(\theta _I\) is constructed (roughly) by flowing along translations of the vector field \(u_t(x,y) = \xi _k(x-t,y)\), where \(\xi _k\) are the maps constructed in Lemma 3.1.
This scheme of splitting–squeezing–transporting–expanding is similar to the constructions in [8]. Since here we do not need to control the endpoint of the flow (just to transport \((0,1)^n\) away from itself), the transporting stage \(\Theta _I\) is much simpler compared to [8]. On the other hand, the squeezing stage is somewhat more elaborate: In order for the norm of \(\xi _k\) to be small, its support, which is a cube of diameter \(\lambda _k\), needs to be small enough; in the subcritical case, it is enough to have \(\lambda _k\) decay faster than any polynomial (in [8], it is \(\lambda _k \approx k^{-\log k}\)), whereas here, in the critical case, we should have \(\lambda _k \ll e^{-k^p}\), in view of Lemma 3.1. Using the same squeezing strategy (i.e., same flow) as in [8] for \(\lambda _k \ll e^{-k^p}\) results in a path from \({\text {Id}}\) to a squeezing diffeomorphism \(\Psi _I\) whose length is unbounded when \(k\rightarrow \infty \) (as shown below), and so we need to alter this path in order to show that \({\text {dist}}({\text {Id}},\Psi _I)\) tends to zero.
A detailed construction of the diffeomorphisms\(\Phi _k\) We now construct \(\Phi _k\) in full detail and prove that \({\text {dist}}_{s,p} ({\text {Id}},\Phi _k) \rightarrow 0\). Henceforth, all limits and asymptotic notations such as o(1) are with respect to the limit \(k\rightarrow \infty \).
Step I: splitting the cube into strips Fix \(k\in \mathbb {N}\). We partition the lattice \(\frac{1}{k}\mathbb {Z}^m \subset \mathbb {R}^m\) into \(2^m\) copies of \(\frac{2}{k}\mathbb {Z}^m\):
where \(\{e_i\}_{i=1}^m\) is the standard basis of \(\mathbb {R}^m\). We index the different lattices as \(Z_I\), \(I\in \mathbb {Z}_2^m\), ordered by
Sometimes we will denote the indices by \(1,\ldots , 2^m\) according to this order. For each \(I\in \mathbb {Z}^m_2\), denote
Note that \(\cup L_I = [0,1]^m\). For \(y\in \mathbb {R}^m\), we will write
when a unique such point exists (such as when \(y\in L_I\)).
Step II: squeezing the strips Fix \(1\le I \le 2^m\). We also fix an auxiliary constant \(\beta \in (0,1-s)\). We now construct a diffeomorphism \(\Psi _I\in {\text {Diff}}_\text {c}(\mathbb {R}^n)\), \(\Psi _I(x,y) = (x,\psi _I(x,y))\), with
such that
for every \(x\in [0,1]\) and \(y\in L_I\), and with
In particular, for every \(x\in [0,1]\),
We construct the squeezing in two stages \(\Psi _I = \Psi _I^2 \circ \Psi _I^1\). We show the construction for \(I=1\); for \(I\ne 1\), the construction is obtained by translating the \(I=1\) case.
We start by constructing \(\Psi _1^1\). Let \(u\in C_\mathrm{c}^\infty ((-1,1)^m;\mathbb {R}^m)\), such that \(u(y) = -y\) for \(y\in [-1/2,1/2]^m\), and extend it to a \(2\mathbb {Z}^m\)-periodic function on \(\mathbb {R}^m\). Let \(\chi \in C_\mathrm{c}^\infty (\mathbb {R}^n)\) such that \(\chi \equiv 1\) on \([0,1]^n\). Define \(u_k^1(x,y) := \frac{\eta _k}{k} u(ky)\chi (x,y)\), where \(\eta _k\gg 1\) will be fixed below. In particular, \(u_k^1(x,y) = -\eta _k (y-[y]_1)\) for \(x\in [0,1]\) and \(y\in L_1\).
Note that
Therefore, by Proposition 1.3, we have
where the last equality holds if we choose \(\eta _k = k^\beta \ll k^{1-s}\) (recall that \(\beta <1-s\)).
Let \(\psi ^1(t,x,y)\) be the solution of
Define \(\psi ^1_1(x,y) := \psi ^1(1,x,y)\), and \(\Psi ^1_1(x,y) := (x,\psi ^1_1(x,y))\). A direct calculation shows that for \((x,y)\in [0,1]\times [-1/2k, 1/2k]^m\), \(\psi ^1_1(x,y) = y e^{-\eta _k}\), so by periodicity and the fact that \(\chi \equiv 1\) on \([0,1]^n\),
for every \(x\in [0,1]\) and \(y\in L_1\). Denote, for \(x\in [0,1]\),
\(\bar{L}_1\) is independent of x and consists of \(\approx k^m\) cubes of diameter \({\approx \exp (-\eta _k)/k} \ll \exp (-k^\beta )\). Also, note that (3.5) implies that
Note that we cannot choose \(\eta _k\) to be large enough such that \(\bar{L}_1\) consists of cubes of diameter \(\ll \exp (-k^p)\), which is our ultimate goal here; indeed, this would require \(\eta _k \approx k^p \gg k^{1-s}\), which violates (3.5). However, once we squeeze \(L_1\) into \(\bar{L}_1\), we can start a new squeezing stage that only squeezes \(\bar{L}_1\). That is, instead of having a vector field u that satisfies \(u(x,y) = -\alpha (y-[y]_1)\) for \(y\in L_1\) (where \(\alpha >0\) is a constant), we only need this to hold for \(y\in \bar{L}_1\). Since \(\bar{L}_1\) is much smaller than \(L_I\), we can have a much larger squeeze factor \(\alpha \), while keeping the norm of u small. This second squeezing stage is described below.
We denote the second squeezing stage by \(\Psi ^2_1 = (x,\psi _1^2(x,y))\). Again, we define \(\psi _1^2(x,y) = \psi ^2(1,x,y)\), where \(\psi ^2(t,x,y)\) is the solution of
for \(u_k^2(x,y)\) that satisfies \(u_k^2(x,y) = -\alpha _k(y-[y]_1)\) for \(x\in [0,1]\), \(y\in \bar{L}_1\), and \(\alpha _k\gg 1\) that will be fixed below. Since \(\bar{L}_1\) consists of cubes of diameter \(\ll \exp (-k^\beta )\), we can choose \(u_k^2\) such that
Choosing \(\alpha _k = \exp (\beta k ^\beta )\), we obtain, since \(\beta <1-s\), that
In particular, we have that
It follows that \(\psi _1^2(x,\cdot )\) squeezes \(\bar{L}_1\) by a factor of \(\exp (-\alpha _k) = \exp (-\exp (\beta k^\beta ))\), that is
for every \(x\in [0,1]\) and \(y\in \bar{L}_1\). Therefore, \(\Psi _1 = \Psi _1^2 \circ \Psi _1^1\) squeezes \(L_1\) such that (3.2)–(3.3) hold, with \(\lambda _k = \exp (-\exp (\beta k^\beta )- k^\beta )/2k\). By Lemma 1.1, we have
as required.
Step III: Flowing the squeezed strips Recall that by (3.4), \(\lambda _k \ll e^{-k^p}\) is the width of the squeezed strips \(\widetilde{L}_{I}\) defined by (3.4), and let \(\xi _k\) be the function associated with \(\lambda _k\) as defined in Lemma 3.1. Define
and
Note thatFootnote 2
Let \(\theta _I(t,x,y)\) be the solution of
and define \(\Theta _I(t,x,y) = (\theta _I(t,x,y),y)\). Denote \(\theta _I(x,y) := \theta _I(1,x,y)\) and \(\Theta _I(x,y) := \Theta _I(1,x,y)\).
Note that for \(y\in \widetilde{L}_{I}\), we have \(\xi _k^I(0,y) \ge 1\), and therefore \(\theta _I(t,0,y) \ge t\). Since \(\theta _I(t,x',y) > \theta _I(t,x,y)\) whenever \(x'>x\), we have that
Note also that since \(\xi _k\ge 0\), we have that
Finally, (3.8) implies that
Step IV: conclusion of the proof Now, define
Note that \(\Phi _k\) and \(\Phi _k^I\) only change the x coordinates; therefore, we write
Estimates (3.1) and (3.11) together with Lemma 1.1 imply that
We now claim that \(\Phi _k({U}) \cap {U} = \emptyset \). This will complete the proof as it shows that the displacement energy of U is zero, since \(\Phi _k({U}) \cap {U} = \emptyset \) implies that \(E(U) \le {\text {dist}}_{s,p}({{\text {Id}},}\Phi _k)\) and the right-hand side tends to zero.
Let \((x,y)\in {U}\). In particular, \(y\in L_I\) for some I. Therefore, \(\psi _I(x,y) \in \widetilde{L}_{I}\), and therefore, since \(x>0\), we have from (3.9)–(3.10) that
hence \(\Phi _k(x,y) \notin {U}\), hence \(\Phi _k(U) \cap U = \emptyset \).
Notes
Similar observations (in the context of contactomophorisms) also appear in [10].
The right-hand side inequality in (3.8) is the reason we need \(\lambda _k\) to be so small, which is achieved by the two-stage squeezing. In the subcritical case \(sp<n\), the \(W^{s,p}\)-capacity of small balls is much smaller, and hence \(\lambda _k\) can be larger (that is, the results of Lemma 3.1 hold for larger values of \(\lambda _k\)), and then the one-stage squeezing used in [8] suffices.
References
Bauer, M., Bruveris, M., Harms, P., Michor, P.W.: Geodesic distance for right invariant Sobolev metrics of fractional order on the diffeomorphism group. Ann. Global Anal. Geom. 44(1), 5–21 (2013)
Bauer, M., Bruveris, M., Michor, P.W.: Geodesic distance for right invariant Sobolev metrics of fractional order on the diffeomorphism group II. Ann. Global Anal. Geom. 44(4), 361–368 (2013)
Bauer, M., Harms, P., Preston, S.C.: Vanishing distance phenomena and the geometric approach to SQG (2018). arXiv:1805.04401
Brezis, H., Mironescu, P.: Gagliardo–Nirenberg, composition and products in fractional Sobolev spaces. J. Evol. Equ. 1(4), 387–404 (2001)
Eliashberg, Y., Polterovich, L.: Bi-invariant metrics on the group of Hamiltonian diffeomorphisms. Internat. J. Math. 04(05), 727–738 (1993)
Epstein, D.B.A.: The simplicity of certain groups of homeomorphisms. Compos. Math. 22(2), 165–173 (1970). (eng)
Eliashberg, Y., Ratiu, T.: The diameter of the symplectomorphism group is infinite. Invent. Math. 103(2), 327–340 (1991)
Jerrard, R.L., Maor, C.: Vanishing geodesic distance for right-invariant Sobolev metrics on diffeomorphism groups. Ann. Global Anal. Geom. 55(4), 631–656 (2019)
Michor, P.W., Mumford, D.: Vanishing geodesic distance on spaces of submanifolds and diffeomorphisms. Doc. Math. 10, 217–245 (2005)
Shelukhin, E.: The Hofer norm of a contactomorphism. J. Symplectic Geom. 15(4), 1173–1208 (2017)
Triebel, H.: Theory of Function Spaces II, Monographs in Mathematics, vol. 84. Birkhäuser, Basel (1992)
Acknowledgements
We are grateful to Martin Bauer, Philipp Harms and Stephen Preston for introducing us their paper and the notion of displacement energy. This work was partially supported by the Natural Sciences and Engineering Research Council of Canada under operating Grant 261955.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Jerrard, R.L., Maor, C. Geodesic distance for right-invariant metrics on diffeomorphism groups: critical Sobolev exponents. Ann Glob Anal Geom 56, 351–360 (2019). https://doi.org/10.1007/s10455-019-09670-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10455-019-09670-z