
Abstract
The Indian Regional Navigation Satellite System (IRNSS), which is being developed for positioning services in and around India, is the latest addition to the global family of satellite-based navigation systems. As IRNSS only shares the L5-frequency with GPS, the European Galileo, and the Japanese Quasi-Zenith Satellite System (QZSS), it has at least at present a limited interoperability with the existing systems. Noting that the L5-frequency capability is under development even for GPS, this contribution assesses the interoperability of the IRNSS L5-signal with the GPS, Galileo, and QZSS L5/E5a-signals for positioning and navigation using real data collected in Perth, Australia. First, the noise characteristic of the IRNSS L5-signal and its comparison with that of the GPS, Galileo, and QZSS L1/E1- and L5/E5a-signals is presented. Then, the L5-observables of combined systems (formed from IRNSS, GPS, Galileo, and QZSS) are assessed for real-time kinematic positioning using the standard LAMBDA method and for instantaneous attitude determination using the constrained LAMBDA method. The results show that the IRNSS L5-signal has comparable noise characteristics as that of the other L5/E5a-signals. For single-frequency carrier phase-based positioning and navigation, the results show better ambiguity resolution performance of L5/E5a-only processing than that of L1/E1-only processing.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
The Indian Regional Navigation Satellite System (IRNSS) is the latest addition to the global family of satellite-based navigation systems. It is a regional system being developed by India for positioning services in and around India. The IRNSS will consist of three geosynchronous orbit (GEO) satellites and four inclined geosynchronous orbit (IGSO) satellites transmitting navigation signals in both the L5-band and the lower S-band, delivering an open standard positioning service (SPS) with a binary phase-shift key [BPSK(1)] modulation and a restricted/authorized service (RS) with a binary offset carrier [BOC(5,2)] modulation (ISRO 2014). The current constellation consists of two IGSO (IRNSS-1A/I1 and IRNSS-1B/I2) satellites and one GEO (IRNSS-1C/I3) satellite, which was only launched recently and is not yet transmitting navigation signals. Analyses in this contribution are based on the L5-observables of I1 and I2 tracked by Javad receivers at Curtin University, Perth, Australia, using a development firmware version (Javad 2014).
As the IRNSS only shares the L5-frequency with GPS, the European Galileo, and the Japanese Quasi-Zenith Satellite System (QZSS), IRNSS has a limited interoperability with these existing systems. Furthermore, the L5/E5a-frequency capability is currently under development even for GPS. Hence, only a few studies on L5/E5a-signal analyses have been reported in the literature. Noise characteristics of the GPS-L5- and Galileo-E5a-signals using a geometry-free approach have been reported in de Bakker et al. (2012). An analysis of precise point positioning using GPS-L5-signals has been reported in Tegedor and Øvstedal (2014). At the time of writing (December 2014), all GPS Block IIF satellites were transmitting L5-signals, except G3, which was launched only recently. Three of the four Galileo In-Orbit Validation (IOV) satellites and one of the two full operational capability (FOC) satellites were transmitting E5a-signals, while J1, the only satellite of QZSS, is transmitting a L5-signal. Furthermore, only two Indian GAGAN satellites of four satellite-based augmentation systems (SBASs) satellites visible in the Western Australian region are transmitting L5-signals. Since the receivers used for this study were not enabled to track SBAS satellites, we focus on GPS, Galileo, QZSS, and IRNSS L5/E5a-signals. Moreover, the ranging observables of SBAS satellites are known to be more noisy than those of the other systems due to the narrow-band transmission (Nadarajah and Teunissen 2014).
Since the IRNSS satellites are a new addition to the family of navigation satellites and their signal description (ISRO 2014) was not available until recently, few studies on IRNSS have been reported in the literature. Apart from simulation-based studies (Sekar et al. 2012; Rethika et al. 2013; Rao 2013), the characterization and identification of IRNSS signals using real data from a 30-m high-gain antenna are reported in Thoelert et al. (2014). We assess the interoperability of the IRNSS L5-signal with the GPS, Galileo, and QZSS L5/E5a-signals for positioning and navigation. First, the noise characteristics of the IRNSS L5-signal and its comparison with that of the GPS, Galileo, and QZSS L1/E1- and L5/E5a-signals are presented. Using the least-squares variance component estimation method (Teunissen and Amiri-Simkooei 2008), it is shown that the noise characteristics of the IRNSS L5-signal are comparable with that of the other systems. Furthermore, the study also reveals that the L5/E5a code observables are less noisy than that of L1/E1 confirming higher received power and better signal design of L5/E5a (GPSD 2013, EU 2010, JAXA 2012, ISRO 2014).
Following the noise analysis, the performances of the L5-observables of combined systems, formed from IRNSS, GPS, Galileo, and QZSS, are assessed for instantaneous attitude determination using the constrained LAMBDA (C-LAMBDA) method (Teunissen 2010, Nadarajah et al. 2014b), as well as for real-time kinematic (RTK) positioning using the standard LAMBDA method. Since identical receivers were used in this study, inter-system biases (ISBs) (Odijk et al. 2012) among common frequency observables from different systems did not need to be explicitly modeled (Odijk and Teunissen 2013; Nadarajah et al. 2013). Hence, inter-system double differencing with a single pivot satellite for all systems, giving a higher level of redundancy than system-specific double differencing, is used. The results show that for single-frequency carrier phase-based positioning and navigation, a better ambiguity resolution performance is obtained with L5/E5a-only processing than with L1/E1-only processing.
Measurement campaign
The analyses are based on data collected from three GNSS stations (CUAA, CUBB, and SPA7) at Curtin University (Fig. 1) on December 6, 2014. All three stations are equipped with JAVAD TRE_G3TH_8 receivers and connected to TRM 59800.00 SCIS antennas tracking all systems except SBAS using a development firmware version (3.6.1b1-36-e202-local November 14, 2014) (Javad 2014). RINEX observations and navigation messages were extracted from JAVAD binary data using a modified version of the CONVBIN utility from the RTKLib open-source software package (Takasu 2007). For all satellites except the Galileo satellites, broadcast ephemeris data are used. For the Galileo satellites, precise orbit and clock products provided as a part of the international GNSS service multi-GNSS experiment (IGS-MGEX) campaign (Montenbruck et al. 2013) are used as receivers did not record broadcast ephemeris data for E18 during the period considered.

IRNSS L5-enabled GNSS stations at Curtin University comprise of JAVAD TRE_G3TH_8 receivers connected to TRM 59800.00 SCIS antennas. Top CUAA–CUBB. Bottom CUAA–SPA7
As shown in the skyplots of Fig. 2, the data include L5-observations from seven GPS Block IIF satellites (G1, G6, G9, G24, G25, G27, and G30), E5a-observables from three Galileo IOV satellites (E11, E12, and E19) and one Galileo FOC satellites (E18), L5-observables from two IRNSS satellites (I1 and I2), and L5-observables from QZSS satellite J1. As the current IRNSS satellites are in the western side of the proposed full IRNSS constellation, the Western Australian region currently has poor IRNSS satellite visibility with satellite elevation only going up to 30°. However, with upcoming launches of the IRNSS satellites for the eastern side of the proposed constellation, the Asia–Pacific region will have a better IRNSS satellite visibility. Figure 3 depicts satellite altitudes indicating near-circular orbits for all except QZSS satellite (J1), which is in a highly elliptical orbit (HEO), and the first Galileo FOC satellite (E18). The recent anomalous launch of E18 together with its twin Galileo FOC satellite resulted in an elongated orbit. Despite the non-nominal orbit, it is shown in the following sections that E18 (the first of two Galileo FOC satellites) can already be used for positioning and navigation.

Skyplot of GPS Block IIF, Galileo, QZSS, and IRNSS satellites with L5/E5a-signals observed at Perth, Australia, on December 6, 2014, with 0° elevation cutoff. Top GPS Block IIF. Bottom Galileo (cyan), QZSS (red), IRNSS (magenta)

Altitude of visible GPS, Galileo, QZSS, and IRNSS satellites with L5/E5a-signals tracked by JAVAD TRE_G3T_8 DELTA receiver connected to TRM59800.00 antenna at Perth, Australia, on December 6, 2014, with 0° elevation cutoff
Figure 4 shows the number of visible satellites with L5/E5a-signals and PDOP values for 10° elevation cutoff. The PDOP values are provided for only a brief period since L5/E5a-only standard positioning requires at least \(3 + N_{\text{s}}\) satellites, where \(N_{\text{s}}\) is the number of satellite systems with at least one satellite.

Satellite visibility (number of satellites and PDOP) of GPS Block II, Galileo, QZSS, and IRNSS satellites with L5/E5a-signals tracked by JAVAD TRE_G3T DELTA receiver connected to TRM59800.00 antenna at Perth, Australia, on December 6, 2014, with 10° elevation cutoff. PDOP values are provided only for the epochs with enough satellites for L5/E5a-only standard positioning
Characteristics of L5/E5a-observables
This section presents the noise characteristic of L5/E5a-observables based on observed carrier-to-noise-density ratio (C/N0) and using analyses with least-squares variance component estimation method (Teunissen and Amiri-Simkooei 2008). Figure 5 depicts the observed C/N0 of L1/E1- and L5/E5a-signals. The GPS L5-signal, transmitted in a radio band dedicated for aviation safety services, has two codes (I5 and Q5) including a data-free channel (Q5), has higher transmission power than that of L1-signal, and has ten times higher chipping rate than that of C/A-signal (GPSD 2013). Hence, the L5-signal has better tracking noise performance than L1-signal.

Carrier-to-noise-density ratio (C/N0) for GPS, Galileo, QZSS, and IRNSS tracked by JAVAD TRE_G3T_8 DELTA receiver connected to TRM59800.00 antenna at Perth, Australia, on December 6, 2014. Top L1/E1-signal. Bottom L5/E5a-signal
Galileo E1-signal with a composite binary offset carrier (CBOC) modulation is expected to have better tracking noise performance compared to GPS L1-signal with the binary phase-shift keying (BPSK). Similarly, Galileo E5a-signal with an alternative BOC (AltBOC) modulation is expected to have a similar tracking noise performance as the new GPS L5-signal. After recent power anomaly in the fourth IOV satellite (FM4 or E20), however, the power on all of the IOV satellites has been reduced by 1.5 dB and E20 has only been transmitting E1-signal (Langley 2014). Hence, Galileo IOV signals have less C/N0 than expected. QZSS L1- and L5-signals have similar signal structures as the GPS counterparts and, hence, have similar tracking noise performance. IRNSS L5-signal has similar tracking noise performance as the other systems for lower elevation angles as observed in Perth, Australia.
Next, the noise characteristics of L5/E5a-observables are assessed using the observations from the short-baseline CUAA–CUBB (Fig. 1) with least-squares variance component estimation method. Since the differential atmospheric delays are absent for such a short baseline, the undifferenced least-squared residuals of the L1- and L5-observables are obtained for the geometry-fixed model with known receiver coordinates. Figure 6 shows the squared values of the stated residuals of the GPS L5- and IRNSS L5-code observables as functions of the satellite elevation. An elevation dependency of the stated residuals, whereby the magnitude of the residuals decreases as the elevation increases, can be seen.

Squared values of the undifferenced least-squared residuals of the L5-signal as function of the satellite elevation. Top GPS L5. Bottom IRNSS L5
To capture the aforementioned elevation dependency of the observables, we adopt the exponential elevation-weighting model (Euler and Goad 1991), where the standard deviation of the undifferenced observable ς is written as
with θ being the elevation angle (in degrees) of the corresponding satellite, and \(\sigma_{{\varsigma_{0} }}\) as the zenith-referenced standard deviation of the undifferenced observable ς.
The zenith-referenced standard deviations of the L1/E1- and L5/E5a-code observables are presented in Table 1. It is observed that while the zenith-referenced standard deviation is almost the same for different systems, the quality of the L5/E5a-code observables generally outperforms that of the L1/E1-code observables in the sense of delivering smaller standard deviations. This observation agrees well with signal characterization based on observed C/N0 in Fig. 5. However, the estimated zenith-referenced standard deviations of both L1/E1- and L5/E5a-phase observables have the same value, which is 1 mm, regardless of the system.
Performance of attitude determination and positioning
This section presents the performance of L5/E5a-only positioning comparing with that of L1/E1-only positioning. As the satellites with L5/E5a-signals are under development, L5/E5a-standard positioning is only available for a fraction of the period considered (Fig. 4). Hence, two distinct data intervals, whereby we have seven combined L5/E5a-signal-enabled satellites visible, are considered for L5/E5a-positioning analyses (Table 2). Since IRNSS satellites do not have signals in the L1/E1-band, L1-observations of GPS Block IIR satellites, namely G10, G11, and G13, are included in the L1/E1-positioning satellite set for a fair comparison of positioning performance between L1/E1 and L5/E5a. These GPS satellites are chosen such that both L1/E1- and L5/E5a-positioning satellite sets have similar satellite geometry (Figs. 7, 8).

Skyplot GPS (green), Galileo (cyan), QZSS (red), and IRNSS (magenta) satellites during the period considered for positioning performance. Top L1/E1 satellite set. Bottom L5/E5a satellite set

PDOP values
Note that the first interval includes Galileo satellite E18, which is in a non-nominal orbit, and I1, which is the first of two current operational IRNSS satellites, while the second interval includes both operational IRNSS satellites (I1 and I2). In the following, the results of attitude determination and RTK positioning based on data at the rate of 1 Hz for the periods indicated in Table 2 consisting of about 6000 epochs are discussed. Since such a small sample size in a short period is possible with current constellations, the results of this contribution should be considered as an indicative first-hand assessment, but not as a fully fledged statistical analysis.
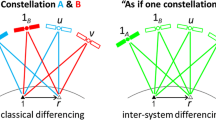
Since the baselines considered in this contribution consist of identical receiver–antenna pairs and the ISBs among common frequency observables from the receivers of the same type are known to be zero (Odijk et al. 2012; Odijk and Teunissen 2013), inter-system double differencing is used (Nadarajah et al. 2013; Nadarajah and Teunissen 2014, see for detailed formulation). This tightly combined observation model uses a single pivot satellite for all systems and yields a higher level of redundancy compared to system-specific double differencing. Note that the PDOP values in Fig. 8 correspond to tightly combined inter-system double differencing and differ from PDOP values depicted in Fig. 4, which are based on standard positioning estimating receiver clock per system in addition to position components.
For attitude determination, the baseline CUAA–CUBB with known baseline length is considered. Table 3 summarizes empirical instantaneous single-frequency ambiguity resolution success rates of L1/E1- and L5/E5a-processing. Here, the true ambiguities are computed using known antenna coordinates in WGS84 since the antennas used are part of Curtin’s permanent stations. The higher instantaneous ambiguity resolution success rate for L5/E5a-processing using the standard LAMBDA method (Teunissen 1995) compared to L1/E1-processing is due to perceived better tracking noise performance of L5/E5a-signals (Fig. 5; Table 1). The use of known baseline length information in C-LAMBDA method (Teunissen 2006, 2010) yields instantaneous attitude determination using even L1/E1-observables from the subset of all available satellites as chosen in Table 2. Figure 9 depicts the attitude angular time series, while Table 4 summarizes empirical angular standard deviations for both float and fixed solutions. The better float estimation accuracy for L5/E5a-processing reflects the better tracking noise performance of the L5/E5a-code observables (Table 1).

Attitude angular time series based on single-frequency epoch-by-epoch processing of static baseline CUAA–CUBB. Top two ambiguity float solution. Bottom two ambiguity fixed solution
For RTK positioning, the short-baseline CUAA–SPA7 (Fig. 1) is considered with atmosphere-fixed model estimating only baseline components and ambiguities (Nadarajah et al. 2014a). Figure 10 depicts the position time series, while Table 5 summarizes empirical position standard deviations for both float and fixed solutions demonstrating the benefit of ambiguity fixing. The empirical instantaneous single-frequency ambiguity resolution success rates of L1/E1- and L5/E5a-processing are 74 and 96 %, respectively. The apparent outperformance of L5/E5a-processing in terms of ambiguity resolution and float estimation is due to better tracking noise performance of L5/E5a-signals (Fig. 5; Table 1).

Baseline component time series based on single-frequency epoch-by-epoch processing of static baseline CUAA–SPA7. Top three ambiguity float solution. Bottom three ambiguity fixed solution
Summary and conclusions
We presented an initial assessment of IRNSS L5-signal together with GPS, Galileo, and QZSS L5/E5a-signals for positioning and navigation. First, the noise characteristics of L5/E5a-signals were assessed based on observed carrier-to-noise-density ratio and variance component estimation indicating precise L5/E5a-code observables compared to L1/E1-code observables due to higher received power and better signal modulation. Furthermore, it has been observed that the performance of IRNSS L5-signal is comparable to that of L5/E5a-signals of other systems. With limited L5/E5a-capable satellite availability from current GNSS constellations, our analyses of L5/E5a-only attitude determination and RTK positioning indicated the superior performance of L5/E5a-only processing especially in terms of instantaneous ambiguity resolution compared to that of L1/E1-only processing. It was also demonstrated that recently deployed L5/E5a-capable satellites such as the first Galileo FOC satellite with non-nominal orbit and first two IRNSS satellites have already been contributing to positioning and navigation. The full potential of L5/E5a-based positioning and navigation is, however, yet to be explored with the fully operational GPS L5-capability and the completion of other systems including Galileo, QZSS, and IRNSS in coming years. With the promising performance of L5/E5a-only processing, the development of L5/E5a-only receivers replacing current L1/E1-only low-cost receivers offering better positioning performance can be foreseeable.
References
de Bakker PF, Tiberius CCJM, van der Marel H, van Bree RJP (2012) Short and zero baseline analysis of GPS L1 C/A, L5Q, GIOVE E1B, and E5aQ signals. GPS Solut 16:53–64
EU (2010) European GNSS (Galileo) open service: signal in space interface control document, Issue 1, Revision 1, European Union, Sep 2010
Euler H-J, Goad C (1991) On optimal filtering of GPS dual frequency observations without using orbit information. J Geod 65:130–143
GPSD (2013) Navstar GPS space segment/navigation user segment interfaces, Revision F (IS-GPS-200H:24-Sep-2013), global positioning system directorate
ISRO (2014). Indian regional navigation satellite system: signal in space ICD for standard positioning service, Version 1.0, ISRO Satellite Centre, Jun 2014
Javad (2014) Javad Delta multi-GNSS receiver. Personal communication, Dec 2014
JAXA (2012) Interface specification for QZSS, Japan Aerospace Exploration Agency
Langley RB (2014) ESA discusses Galileo satellite power loss, upcoming launch. http://gpsworld.com/esa-discusses-galileo-satellite-power-loss-upcoming-launch/, Aug 2014. Online; accessed: 06 Jan 2015
Montenbruck O, Steigenberger P, Khachikyan R, Weber R, Langley R, Mervart L, and Hugentobler U (2013) IGS-MGEX: preparing the ground for multi-constellation GNSS science, proceedings 4th international colloquium scientific and fundamental aspects of the galileo programme, Prague, Czech Republic, 4–6 Dec 2013, ESA-European GNSS Agency, pp 1–8
Nadarajah N, Teunissen PJG (2014) Instantaneous GPS/Galileo/QZSS/SBAS attitude determination: a single-frequency (L1/E1) robustness analysis under constrained environments. Navigation 61(1):65–75
Nadarajah N, Teunissen PJG, Raziq N (2013) Instantaneous GPS–Galileo attitude determination: single-frequency performance in satellite-deprived environments. IEEE Trans Veh Technol 62(7):2963–2976
Nadarajah N, Teunissen PJG, Sleewaegen J-M, Montenbruck O (2014a) The mixed-receiver BeiDou inter-satellite-type bias and its impact on RTK positioning. GPS Solut. doi:10.1007/s10291-014-0392-6
Nadarajah N, Teunissen PJG, Raziq N (2014b) Instantaneous BeiDou–GPS attitude determination: a performance analysis. Adv Space Res 54(5):851–862
Odijk D, Teunissen PJG (2013) Characterization of between-receiver GPS-Galileo inter-system biases and their effect on mixed ambiguity resolution. GPS Solut 17(4):521–533
Odijk D, Teunissen PJG, Huisman L (2012) First results of mixed GPS + GIOVE single-frequency RTK in Australia. J Spat Sci 57(1):3–18
Rao VG (2013) Proposed LOS fast TTFF signal design for IRNSS, PhD thesis, University of Calgary
Rethika T, Mishra S, Nirmala S, Rathnakara SC, Ganeshan AS (2013) Single frequency ionospheric error correction using coefficients generated from regional ionospheric data for IRNSS. Indian J Radio Space Phys 42(3):125–130
Sekar S, Sengupta S, and Bandyopadhyay K (2012) Spectral compatibility of BOC(5,2) modulation with existing GNSS signals, PLANS-2012 IEEE/ION, Myrtle Beach, SC, Apr 2012, pp 886–890
Takasu T (2007) RTKLIB: An open source program package for GNSS positioning, available online: www.rtklib.com
Tegedor J, Øvstedal O (2014) Triple carrier precise point positioning (PPP) using GPS L5. Surv Rev 46(337):288–297
Teunissen PJG (1995) The least-squares ambiguity decorrelation adjustment: a method for fast GPS integer ambiguity estimation. J Geod 70:65–82
Teunissen PJG (2006) The LAMBDA method for the GNSS compass. Artif Satell 41(3):89–103
Teunissen PJG (2010) Integer least-squares theory for the GNSS compass. J Geod 84(7):433–447
Teunissen PJG, Amiri-Simkooei A (2008) Least-squares variance component estimation. J Geod 82:65–82
Thoelert S, Montenbruck O, Meurer M (2014) IRNSS-1a: signal and clock characterization of the Indian regional navigation system. GPS Solut 18(1):147–152
Acknowledgments
This work has been executed as part of the Positioning Program Project 1.01 “New carrier phase processing strategies for achieving precise and reliable multi-satellite, multi-frequency GNSS/RNSS positioning in Australia” of the Cooperative Research Centre for Spatial Information (CRC-SI). The third author P. J. G. Teunissen is the recipient of an Australian Research Council Federation Fellowship (Project Number FF0883188). A development version of firmware for JAVAD receivers was kindly provided by JAVAD GNSS Inc. All this support is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Nadarajah, N., Khodabandeh, A. & Teunissen, P.J.G. Assessing the IRNSS L5-signal in combination with GPS, Galileo, and QZSS L5/E5a-signals for positioning and navigation. GPS Solut 20, 289–297 (2016). https://doi.org/10.1007/s10291-015-0450-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-015-0450-8