
Abstract
We extend the estimates for maximal Fourier restriction operators proved by Müller et al. (Rev Mat Iberoam 35:693–702, 2019) and Ramos (Proc Am Math Soc 148:1131–1138, 2020) to the case of arbitrary convex curves in the plane, with constants uniform in the curve. The improvement over Müller, Ricci, and Wright and Ramos is given by the removal of the \({\mathcal {C}}^2\) regularity condition on the curve. This requires the choice of an appropriate measure for each curve, that is suggested by an affine invariant construction of Oberlin (Michigan Math J 51:13–26, 2003). As corollaries, we obtain a uniform Fourier restriction theorem for arbitrary convex curves and a result on the Lebesgue points of the Fourier transform on the curve.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The study of the restriction phenomena for the Fourier transform in \({\mathbb {R}}^n\) has been an active research topic in harmonic analysis over the last decades. The most common instance of it, a Fourier restriction estimate, comes in the form of the following inequality for every Schwartz function \(f \in {\mathcal {S}}({\mathbb {R}}^n)\)
where \(\widehat{f}\) is the Fourier transform of f, S a hypersurface with appropriate curvature properties, \(\nu \) a suitable measure on S, the exponents p and q vary in an appropriate range, and the constant \(C(p,q,S,\nu )\) is independent of f. The a priori estimate in the previous display guarantees the existence of a bounded restriction operator \({\mathcal {R}} :L^p({\mathbb {R}}^n) \rightarrow L^q(S,\nu )\) such that \({\mathcal {R}} f = \widehat{f}\) on S when \(f \in {\mathcal {S}}({\mathbb {R}}^n)\). Such Fourier restriction estimates were first studied by Fefferman and Stein who proved a result in any dimension ([11], pg. 28). This result was later improved by the celebrated Stein-Tomas method [26, 31] which focuses on the case \(q=2\). Since then, a huge mathematical effort has been put into studying the Fourier restriction phenomena leading to the development of many new techniques. Despite that, many problems for any arbitrary dimension \(n \ge 3\) are still open. For example, the question about sufficient conditions on the exponents p and q in order for a Fourier restriction estimate to hold true.
In fact, standard examples (constant functions, Knapp examples) in the case of the sphere \(S={\mathbb {S}}^{n-1}\) with the induced Borel measure \(\sigma \) provide necessary conditions on the range of exponents p and q in order for the inequality in the previous display to hold true, namely
where \(\frac{1}{p}+\frac{1}{p'}=1\). The main conjecture in the theory of Fourier restriction is that these conditions are sufficient too. We refer to the exposition of Tao in [30] for a description of the aforementioned standard examples. We point to the same reference also for a more exhaustive introduction to the research topic of Fourier restriction, as well as an overview of the results up to 2004.
In the case of a \({\mathcal {C}}^2\) convex curve \(\Gamma \) in the plane \({\mathbb {R}}^2\) the conditions on the exponents are also sufficient. Sharp estimates were proved first for the circle \({\mathbb {S}}^1\) by Zygmund in [33], and for more general curves by Carleson and Sjölin in [5] and Sjölin in [25]. In fact, in [25] Sjölin proved a uniform Fourier restriction result for such curves upon the choice of a specific measure \(\nu = \nu (\Gamma )\) on each curve. This is the so called affine arclength measure, encompassing the curvature properties of the \(\Gamma \). In the case of the circle, it coincides with the induced Borel measure \(\sigma \), thus proving the sharpness of the result of Sjölin.
In [18] Müller, Ricci, and Wright addressed a different feature of the Fourier restriction phenomena, namely the pointwise relation between \({\mathcal {R}}f\) and \(\widehat{f}\) for an arbitrary function \(f \in L^p({\mathbb {R}}^n)\). In the case of a \({\mathcal {C}}^2\) convex curve and a function \(f \in L^p({\mathbb {R}}^2)\), with \(1 \le p < 8/7\) they proved that \(\nu \)-almost every point of the curve is a Lebesgue point for \(\widehat{f}\). Moreover, they showed that the regularized value of \(\widehat{f}\) coincides with that of \({\mathcal {R}}f\) at \(\nu \)-almost every point of the curve. The main ingredient in their proof is given by the estimates for a certain maximal Fourier restriction operator \({\mathcal {M}}\) defined as follows. For every Schwartz function \(f \in {\mathcal {S}}({\mathbb {R}}^2)\) we define
where \(\chi _R\) is a bump function adapted to R normalized in \(L^1({\mathbb {R}}^2)\) and the supremum is taken over all rectangles R centred at the origin with sides parallel to the axes. Next, they use the estimate
where M is the classical two-parameter maximal operator and h is defined by \(\widehat{h} = \left|{\widehat{f}}\right|^2\). To obtain the desired result about the Lebesgue points for \(f \in L^p({\mathbb {R}}^2)\), they need to bound the norms of h by those of f. This forces to assume the additional condition \(p < 8/7\) on the exponent.
In [22] Ramos extended their result to the full range \(1 \le p < 4/3\) in the case of the circle \({\mathbb {S}}^1\). The improvement relies on the estimates he proved for a more general class of maximal Fourier restriction operators
where for every function g normalized in \(L^{\infty }({\mathbb {R}}^2)\) we define \({\mathcal {M}}_g\) as follows. For every Schwartz function \(f \in {\mathcal {S}}({\mathbb {R}}^2)\) we define
where the supremum is taken over all rectangles R centred at the origin with sides parallel to the axes. In particular, the freedom in the choice of g allows Ramos to bring the absolute value inside the integral defining the averages, thus bypassing the artificial limitation arising in Müller, Ricci, and Wright argument.
The line of investigation about the boundedness properties of maximal Fourier restriction operators initiated by Müller, Ricci, and Wright has been developed further in a series of papers that followed up. In [32] Vitturi studied estimates for a maximal Fourier restriction operator in the case of the sphere \({\mathbb {S}}^{n-1}\) in \({\mathbb {R}}^n\) for any arbitrary dimension \(n \ge 3\). The operator considered is of the form described in (1.1) with the supremum taken over averages on balls. Vitturi used the estimates on this operator to prove the analogue of the Lebesgue points property of \(\widehat{f}\) for every function \(f \in L^p({\mathbb {R}}^2)\) with \(1 \le p \le 8/7\). The range of exponents was later improved by Ramos in [22] to \(1 \le p \le 4/3\) considering maximal Fourier restriction operators of the form described in (1.2) with the supremum taken over averages on balls. It is worth noting that in the case of dimension \(n \ge 3\), due to the range of Stein-Tomas estimates, the endpoint \(p = 4/3\) is recovered, as opposed to the case of dimension \(n=2\).
In parallel, in [16] Kovač studied estimates for certain variational Fourier restriction operators in any arbitrary dimension \(n \ge 2\). These operators are defined by variation norms, rather than the \(L^\infty \) norm, on averages of the form of those appearing on the right hand side in (1.1) computed with respect to isotropic rescaling of an arbitrary measure \(\mu \). He developed an abstract method to upgrade Fourier restriction estimates with \(p<q\) to estimates for the variational Fourier restriction operators with the same exponents. As a consequence, he obtained a quantitative version of the qualitative result about the convergence of averages in Lebesgue points. Kovač provided sufficient conditions for the method to work. These conditions are expressed in terms of certain decay estimates on the gradient of \(\widehat{\mu }\). Together with Oliveira e Silva, he later improved over the sufficient conditions in [17].
Next, in [23] Ramos studied estimates for certain maximal Fourier restriction operators associated with an arbitrary measure \(\mu \) in the case of dimension \(n=2\) and \(n=3\). Once again, he considered operators of the form described in (1.2) with the supremum taken over averages computed with respect to isotropic rescaling of \(\mu \). Ramos provided sufficient conditions on the measure \(\mu \) to obtain estimates for the maximal Fourier restriction operators. These conditions are expressed in terms of the boundedness properties close to \(L^2({\mathbb {R}}^n)\) of the maximal function associated with \(\mu \). In particular, he recovered the case of the spherical measures that, in dimension \(n=2\) and \(n=3\), do not satisfy the sufficient conditions stated in [16, 17]. Since Kovač and Oliveira e Silva use stronger norms but weaker averages than Ramos, the results in [16, 17] and those in [22, 23] are not comparable, and we refer to those papers for an exposition of the connections between their results.
Finally, in [15] Jesurum studied estimates for a maximal Fourier restriction operator in the case of the moment curve \(\{ (t,\frac{1}{2}t^2, \dots , \frac{1}{n} t^n) :t \in {\mathbb {R}}\}\) in \({\mathbb {R}}^n\) for any arbitrary dimension \(n \ge 3\). The operator considered is of the form described in (1.2) with the supremum taken over averages on balls. Jesurum followed the argument of Drury in [10], where Drury proved Fourier restriction estimates for the moment curve in the full range \(1 \le p < (n^2+n+2)/(n^2+n)\), \(q = 2p'/(n^2+n)\). In particular, Jesurum recovered the analogue of the Lebesgue points property of \(\widehat{f}\) for every function \(f \in L^p({\mathbb {R}}^n)\) with p in the same range of exponents.
In fact, both Ramos in [23] and Jesurum in [15] considered also stronger maximal Fourier restriction operators. In particular, in the definition of these operators they substituted the supremum taken over \(L^1\) averages on balls with that over \(L^r\) averages for arbitrary \(r \ge 1\). By Hölder’s inequality, the operators are increasing in r. We refer to those papers for details about the estimates for these maximal Fourier restriction operators, as well as the analysis of the threshold values for \(r \ge 1\) in relation to such estimates.
In this paper, we are concerned with extending the results of Müller, Ricci, and Wright in [18] and Ramos in [22] to the case of arbitrary convex curves in the plane, uniformly in the curve. Such curves are the boundaries of non-empty open convex sets in \({\mathbb {R}}^2\). Passing from the case of the circle \({\mathbb {S}}^1\) to the case of an arbitrary \({\mathcal {C}}^2\) convex curve \(\Gamma \) is straight-forward upon the choice of the affine arclength measure on \(\Gamma \). We are going to introduce such measure in a moment. The main point of the paper is the removal of the \({\mathcal {C}}^2\) regularity condition on the curve. It goes through the choice of a suitable extension of the affine arclength measure, which was suggested by an affine invariant construction described by Oberlin in [21]. The desired extension of the results then follows the line of proof by Ramos up to the appropriate modifications.
We turn now to the description of two measures on an arbitrary convex curve \(\Gamma \) in the plane. We elaborate in more detail in Sect. 2 and Appendix A. A first measure \(\nu \) is built from the arclength parametrization such a curve always admits
where J is an interval in \({\mathbb {R}}\), possibly unbounded. Let m be the Lebesgue measure on J. The first and second derivatives \(z'\) and \(z''\) with respect to m are functions well-defined pointwise m-almost everywhere on J. We define a measure \(\nu \) on J by
With a slight abuse of notation we denote by \(\nu \) also its push-forward to \(\Gamma \) via the affine arclength parametrization z. In particular, when \(\Gamma \) is \({\mathcal {C}}^2\) the argument of the cubic root is well-defined everywhere in J and the measure \(\nu \) on \(\Gamma \) is called affine arclength measure. We extend the term to denote \(\nu \) in the general case of arbitrary convex curves.
We define a second measure \(\mu \) on \(\Gamma \) following Oberlin. Oberlin’s construction of the affine measures \(\{\mu _{n,\alpha } :\alpha \ge 0 \}\) on \({\mathbb {R}}^n\) is analogous to that of the Hausdorff measures. The only difference is that in the former we use rectangular parallelepipeds in \({\mathbb {R}}^n\) to cover sets while in the latter we use balls. This change guarantees the affine invariance of \(\mu _{n,\alpha }\), as well as it allows \(\mu _{n,\alpha }\) to be sensitive to the curvature properties of the set on which \(\mu _{n,\alpha }\) is evaluated. A general definition of \(\mu _{n,\alpha }\) can be found in [21]. Here, we restrict ourselves to the case \(n=2\), \(\alpha =2/3\) and we drop the subscripts from the notation of \(\mu \).
Definition 1.1
(Affine measure \(\mu \) on \({\mathbb {R}}^2\)) For every \(\delta > 0\) and every subset \(E \subseteq {\mathbb {R}}^2\) we define
where \(\left|{R}\right|\) is the Lebesgue measure of the rectangle R and \({\mathcal {R}}^\delta \) is the collection of all rectangles in \({\mathbb {R}}^2\) with diameter smaller than or equal to \(\delta \). Next, we define
Finally, we define the affine measure \(\mu \) on \({\mathbb {R}}^2\) to be the restriction of the outer measure \(\mu ^*\) on \({\mathbb {R}}^2\) to its Carathéodory measurable subsets of \({\mathbb {R}}^2\).
With a slight abuse of notation we denote by \(\mu \) also its restriction to the convex curve \(\Gamma \), as well as its push-forward to J via the inverse of the bijective function given by an arclength parametrization z for \(\Gamma \).
In [21] Oberlin proved that if the curve \(\Gamma \) is \({\mathcal {C}}^2\), then the affine measure \(\mu \) and the affine arclength measure \(\nu \) are comparable up to multiplicative constants uniform in the curve. The first observation of this paper is the extension of this property to the case of arbitrary convex curves.
Theorem 1.2
There exist constants \(0< A \le B < \infty \) such that for every convex curve \(\Gamma \) we have
where \(\mu , \nu \) are the measures on \(\Gamma \) defined above.
The second observation of this paper is the uniform extension of the boundedness properties of the maximal Fourier restriction operator defined in (1.2) to the case of arbitrary convex curves.
Theorem 1.3
Let \(1 \le p < 4/3\), \(q = p'/3\). There exists a constant \(C = C(p) < \infty \) such that for every function \(g \in L^{\infty }({\mathbb {R}}^2)\) normalized in \(L^{\infty }({\mathbb {R}}^2)\), every convex curve \(\Gamma \), and every Schwartz function \(f \in {\mathcal {S}}({\mathbb {R}}^2)\) we have
where \(\nu \) is the measure on \(\Gamma \) defined above.
We have two straight-forward corollaries. The first is a uniform Fourier restriction result for arbitrary convex curves.
Corollary 1.4
Let \(1 \le p < 4/3\), \(q = p'/3\). There exists a constant \(C = C(p) < \infty \) such that for every convex curve \(\Gamma \) and every Schwartz function \(f \in {\mathcal {S}}({\mathbb {R}}^2)\) we have
where \(\nu \) is the measure on \(\Gamma \) defined above.
The second is the extension of the result on Lebesgue points of \(\widehat{f}\) on the curve to the case of arbitrary convex curves.
Corollary 1.5
Let \(1 \le p < 4/3\). Let \(\Gamma \) be a convex curve and \(\nu \) the measure on \(\Gamma \) defined above. If \(f \in L^p({\mathbb {R}}^2)\), then \(\nu \)-almost every point of \(\Gamma \) is a Lebesgue point for \(\widehat{f}\). Moreover, the regularized value of \(\widehat{f}\) coincides with the one of \({\mathcal {R}}f\) at \(\nu \)-almost every point of \(\Gamma \).
The results stated in Theorem 1.3 and the corollaries highlight a strict relation between the following objects. On one hand, the affine arclength and Oberlin’s affine measures, sensitive to the curvature properties of the sets on which they are defined. On the other hand, uniform estimates for classical operators involving smooth enough submanifolds in \({\mathbb {R}}^n\), where the curvature properties of the submanifold play a significant role. Beyond Fourier restriction operators, it is the case of convolution operators, X-ray transforms, and Radon transforms. We conclude the Introduction briefly mentioning previous works pointing at the aforementioned relation in the analysis of all these operators [1,2,3,4, 6,7,8,9, 14, 19, 20, 28, 29]. We refer to these papers and the references therein for a more thorough exposition of the relation. Finally, we point out the work of Gressman in [12] on the generalization of the affine arclength measure to smooth enough submanifolds of any arbitrary dimension d in \({\mathbb {R}}^n\).
1.1 Guide to the paper
In Sect. 2 we introduce some notations, definitions, and previous results we clarify in Appendix A. In Sect. 3 we prove Theorem 1.2. In Sect. 4 we prove Theorem 1.3 and the corollaries.
2 Preliminaries
2.1 Notation
We introduce the following notations.
For every interval \(I \subseteq {\mathbb {R}}\) we denote by \(\Delta (I)\) the lower triangle associated with I defined by
For all vectors \(a,b \in {\mathbb {R}}^2 \setminus \{ (0,0) \}\) we denote by \(\theta (a,b) \in [0,2 \pi )\) the counterclockwise angle from a to b.
2.2 Real analysis
We recall a result about the metric density associated with the absolutely continuous part of a measure with respect to the Lebesgue measure.
Definition 2.1
Let \(x \in {\mathbb {R}}^n\). We say that a sequence \(\{ E_\varepsilon :\varepsilon > 0 \}\) shrinks to x nicely if it is a sequence of Borel sets in \({\mathbb {R}}^n\) and there is a number \(\alpha >0\) satisfying the following property. There is a sequence of balls \(\{ B(x,r_\varepsilon ) :\varepsilon > 0 \}\) with \(\lim _{\varepsilon \rightarrow 0} r_\varepsilon =0\), such that for every \(\varepsilon > 0\) we have \(E_\varepsilon \subseteq B(x,r_\varepsilon )\) and
Theorem 2.2
(Rudin [24], Theorem 7.14) For every \(x \in {\mathbb {R}}^n\) let \(\{ E_\varepsilon (x) :\varepsilon > 0 \}\) be a sequence that shrinks to x nicely. Let \(\mu \) be a Borel measure on \({\mathbb {R}}^n\). Let
be the decomposition of \(\mu \) into the absolutely continuous and singular parts with respect to the Lebesgue measure m in \({\mathbb {R}}^n\). Then, for m-almost every \(x \in {\mathbb {R}}^n\) we have
2.3 Convex curves
We introduce some auxiliary notations and definitions, and we recall some observations and properties for convex curves in the plane. They guarantee a formalization of the definition of the affine arclength measure \(\nu \) we gave in the Introduction. These properties are standard, but we were not able to find any clear reference for them. Therefore, for the sake of completeness we include the required proofs in Appendix A.
Definition 2.3
A set \(K \subseteq {\mathbb {R}}^n\) is convex if for all \(x,y \in K\), \(0 \le \lambda \le 1\) we have
A convex curve \(\Gamma \subseteq {\mathbb {R}}^2\) is the boundary \(\partial K\) of a non-empty open convex set \(K \subseteq {\mathbb {R}}^2\).
From now on, we restrict ourselves to compact convex curves. We extend the definitions and results to every non-compact convex curve \(\Gamma \) considering the sequence of compact convex curves
Theorem 2.4
Every compact convex curve \(\Gamma \) is rectifiable.
Therefore, a compact convex curve \(\Gamma \) admits an arclength parametrization
where \(\ell (\Gamma )\) is the length of the curve \(\Gamma \). Without loss of generality, we assume the parametrization to be counterclockwise. Moreover, we have an almost identical arclength parametrization defined by
With a slight abuse of notation, we denote both of the arclength parametrizations by z. The identification is harmless and involves a single point. At any time it will be made clear by the context which one is the appropriate choice of the arclength parametrization we are considering. A first instance of the feature just described appears in the following statement about the existence of well-defined left and right derivatives of the function z. Strictly speaking, we should define the left derivative \(\widetilde{z}'_l\) of \(\widetilde{z}\) on \(\widetilde{J}\), and the right derivative \(z'_r\) of z on J.
Theorem 2.5
The left and right derivatives \(z'_l\) and \(z'_r\) of z with respect to the Lebesgue measure m on J are well-defined functions from J to \({\mathbb {S}}^1\), and they coincide m-almost everywhere.
In fact, the functions \(z'_l\) and \(z'_r\) admit well-defined derivatives m-almost everywhere.
Theorem 2.6
The derivatives \(z''_l\) and \(z''_r\) of \(z'_l\) and \(z'_r\) with respect to the Lebesgue measure m on J are well-defined m-almost everywhere. They are functions from J to \({\mathbb {R}}^2\) and coincide m-almost everywhere.
Next, we define the Borel measure \(\sigma \) on J as follows. For all \(a,b \in J\), \(a \le b\) we define
We denote by \(\kappa \) the metric density associated with the absolutely continuous part of \(\sigma \) with respect to the Lebesgue measure m on J.
Theorem 2.7
The measure \(\sigma \) is positive. The function \(\kappa \) coincides m-almost everywhere with the functions \(\det \begin{pmatrix} z_l'&z_l'' \end{pmatrix}\) and \(\det \begin{pmatrix} z_r'&z_r'' \end{pmatrix}\).
Finally, we define the affine arclength measure \(\nu \) on J by
With a slight abuse of notation, we denote by \(\nu \) also its push-forward to \(\Gamma \) via the affine arclength parametrization z.
3 Proof of Theorem 1.2
We begin by stating and proving an auxiliary lemma about the qualitative relation between the affine measure \(\mu \) and the Lebesgue measure m on J.
Lemma 3.1
The measure \(\mu \) is absolutely continuous with respect to the Lebesgue measure m on J, namely for every subset \(E \subseteq J\) we have
In its proof, we need the following auxiliary definition.
Definition 3.2
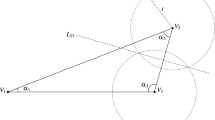
Let \(I \subseteq J\) be an interval. Let c and d be in the closure \(\bar{J}\) of J such that \(\bar{I}= [c,d]\). Assume that \(\sigma ((c,d)) \le \pi /2\). We define the rectangle R(I) over I to be the minimal rectangle containing z(I) as follows.
If \(z'\) is constant on the interior of I, then z(I) is a segment. The affine measure \(\mu \) of z(I) is zero, as z(I) can be covered by arbitrarily thin rectangles. We define R(I) to be the segment z(I) itself.
If \(z'\) is not constant on the interior of I, then we define R(I) to be the rectangle with two adjacent vertices in z(c) and z(d), and minimal width h(R(I)), see Fig. 1. The condition on \(z'\) guarantees that \(h(R(I)) > 0\). Moreover, let \(b(R(I)) = \left|{z(d)-z(c)}\right|\). Furthermore, let the point z(e) be in the intersection between z(I) and the side of the rectangle opposite to that connecting z(c) to z(d). Finally, let \(\phi \) and \(\psi \) be the angles defined by

The rectangle R(I) over the interval I
Proof of Lemma 3.1
Let \(E \subseteq J\) be such that \(m(E)=0\). We want to show that for every \(\rho > 0\) there exists a covering of z(E) by a collection of rectangles with bounded diameter such that the sum of their areas is bounded by \(\rho \).
By assumption, E has 1-dimensional Hausdorff measure zero. Therefore, for every \(\varepsilon >0\) there exists a covering of E by disjoint intervals \(\{ I_n = [c_n,d_n) :n \in {\mathbb {N}}\}\) of bounded lengths \(\ell _n=m(I_n) = \left|{d_n - c_n}\right|\) such that
Without loss of generality, up to splitting every interval into four subintervals, we can assume \(\sigma (I_n) \le \pi /2\).
The set z(E) can be covered by the family \(\{R_n :n \in {\mathbb {N}}\}\) of rectangles, where for every \(n \in {\mathbb {N}}\) we define \(R_n = R(I_n)\) to be the rectangle over the interval \(I_n\) as in Definition 3.2. The diameter of \(R_n\) is bounded from above by
By the definition of the length of a curve, see Definition A.6 in the Appendix, the sum in the previous display is bounded from above by \(\ell (z(I_n))\). Finally, since z is an arclength parametrization, we have that \(\ell (z(I_n)) = \ell _n\). Therefore, for every \(n \in {\mathbb {N}}\) the diameter of \(R_n\) is bounded from above.
Moreover, we claim that for every \(n \in {\mathbb {N}}\) we have
where \(h_n = h(R_n)\). In fact, for \(e_n\), \(\phi _n\), and \(\psi _n\) as in Definition 3.2 and Fig. 1 we have
Therefore, we have
where we used the definition of the length of a curve to dominate \(b_n = b(R_n)\) by \(\ell _n\) in the first inequality, the inequality in (3.2) in the second, Hölder’s inequality with the pair of exponents (3/2, 3) in the third, and the inequality in (3.1), the disjointness of \(I_n\), and the definition of \(\sigma \) in the fourth.
By taking \(\varepsilon \) arbitrarily small, we obtain the desired result. \(\square \)
Next, we prove the quantitative relation between the affine measure \(\mu \) and the affine arclength measure \(\nu \) stated in Theorem 1.2.
Proof of Theorem 1.2
Without loss of generality, up to splitting J into eight disjoint subintervals, we can assume \(\sigma (J) \le \pi /4\). It is enough to prove the desired comparability for every subset \(E \subseteq J\).
Part I: \(A \nu \le \mu \). Let R be a closed rectangle such that
where \([c,d] \subseteq J\). Let \(\Phi :\Delta ([c,d]) \rightarrow R+R\) be the function defined by
The determinant of its Jacobian is defined m-almost everywhere, and it is
Since the area of the subset \(R+R\) is \(4\left|{R}\right|\), we have
where \({{\,\textrm{d}\,}}z'\) is the distributional derivative of \(z'\), and \(z''\) is a function coinciding m-almost everywhere with \(z_l''\) and \(z_r''\).
For m-almost all \(t,u \in J\), \(t \le u\) we have
where in the second and in the third equality, as well as in the inequality we used
and in the inequality we also used
Therefore, there exists a constant \( C < \infty \) such that we have
where we used the definition of \(\nu \) in the first equality, Hölder’s inequality with the pair of exponents (3/2, 3) in the first inequality, we evaluated the first factor, which is independent of c and d, in the third equality, we used Fubini in the second inequality, and we used Theorem 2.7 and the chains of inequalities in (3.4) and (3.3) in the third inequality.
Now, let \(\{ R_n :n \in {\mathbb {N}}\}\) be a set of rectangles covering z(E) and define \(E_n \subseteq E\) by
Then \(\{ E_n :n \in {\mathbb {N}}\}\) is a covering of E, and we have
By taking the \(\liminf \) over all the possible coverings, we obtain the desired inequality.
Part II: \(\mu \le B \nu \). By Lemma 3.1, there exists a function \(\mu ' :J \rightarrow [0, \infty )\) defined m-almost everywhere such that for every measurable subset \(E \subseteq J\) we have
By Theorem 2.2, for m-almost every \(t \in J\) we have
As in the proof of Lemma 3.1, the limit is bounded from above by
By Theorem 2.2 and Theorem 2.7, we obtain the desired inequality. \(\square \)
4 Proofs of Theorem 1.3 and the corollaries
We begin with an auxiliary definition.
Definition 4.1
A measurable function a in \({\mathbb {R}}^n\) is a bump function if there exists a rectangular parallelepiped R centred at the origin with sides parallel to the axes such that
We denote by \({\mathcal {A}}_n\) the collection of bump functions on \({\mathbb {R}}^n\).
The convolution with such bump functions is pointwise bounded by the strong Hardy-Littlewood maximal function, uniformly in the rectangle.
Next, we state and prove an auxiliary lemma about the boundedness properties of the adjoint operator of a certain linearised maximal Fourier restriction operator.
Lemma 4.2
Let \(1\le r< 2\). There exists a constant \(C=C(r) < \infty \) such that the following property holds true.
For every convex curve \(\Gamma \) parametrized by arclength \(z: J \rightarrow \Gamma \subseteq {\mathbb {R}}^2\) and every collection \(\{ a_{z(t)} :t \in J \} \subseteq {\mathcal {A}}_2\) of bump functions such that, as a function in (t, x),
let \(S = S(\Gamma ,\{ a \})\) be the operator defined as follows. For every function \(f \in L^4(J,\nu )\) we define
Then, we have
Its proof relies on a lemma about the boundedness properties of an adjoint operator of a linearised maximal operator combined with a Fourier transform proved by Ramos.
Lemma 4.3
(Ramos [22], Lemma 1) Let \(n,k \ge 1\). There exists a constant \(C=C(n,k) < \infty \) such that the following property holds true.
For every collection
of convolution products of k bump functions such that, as function in (x, y),
let \(T = T(\{b_x \})\) be the operator defined as follows. For every function \(f \in L^2({\mathbb {R}}^n) \cap L^1({\mathbb {R}}^n)\) we define
Then, we have
Proof of Lemma 4.2
Without loss of generality, by the definition of \(\nu \), we restrict our attention to \(I \subseteq J\) where \(z'_l\) and \(z'_r\) coincide, and \(\kappa (t)\) is well-defined and strictly positive.
Following the idea of Carleson-Sjölin in [5] and Sjölin in [25], we rewrite the square of Sf via a two-dimensional integral
We change variables via the bijective function \(\Phi :\Delta (I) \rightarrow \Omega \subseteq {\mathbb {R}}^2\) defined by
and for \((s,t) \in \Delta (I)\) we define
By the definition of \(\nu \) and \(\Phi \), we obtain
Next, we prove by interpolation that for every \(1\le r\le 2\) there exists a constant \(C=C(r) < \infty \) such that we have
The case \(r=1\) follows from \(\left\Vert {\widehat{b}_x}\right\Vert _{L^\infty ({\mathbb {R}}^2)} \le C\). The case \(r=2\) follows from Lemma 4.3.
After that, to estimate the \(L^r({\mathbb {R}}^2)\) norm of F for \(1\le r<2\), we invert the change of variables \(\Phi \),
where we define \(\theta :I \rightarrow [0,2 \pi )\) by requiring
We split \(\Delta (I)\) in the four subsets defined as follows. For \(j \in \{1,2,3,4\}\) we define
and we observe that
We obtain the desired estimate by controlling the portions of the integral in (4.1) in the corresponding subsets separately.
Case I: \((s,t) \in \Delta _{1}\). We have
By the assumption on I made at the beginning of the proof, the function \(\Psi _1 :\Delta _{1} \rightarrow \widetilde{\Delta }_{1} \subseteq [0, 2 \pi )^2\) defined by
is bijective. Together with the change of variables via the function \(\Psi _1\), the inequality in (4.2) yields that the portion of the integral in (4.1) on \(\Delta _{1}\) is bounded from above by
By Hardy-Littlewood-Sobolev inequality, up to a multiplicative constant, the previous display is bounded from above by
where \(\widetilde{I} = \alpha (I)\) and \(\widetilde{\nu }\) is the push-forward to \(\widetilde{I}\) via \(\alpha \) of the measure \(\nu \) on I. We change variables via the inverse of the bijective function \(\alpha \) defined in (4.3). Up to a multiplicative constant, we obtain the desired estimate for the portion of the integral in (4.1) on \(\Delta _{1}\) by
Case II: \((s,t) \in \Delta _{2}\). For \(S_2(t)\) defined by
we have
By the assumption on I made at the beginning of the proof, the function \(\Psi _2 :\Delta _{2} \rightarrow \widetilde{\Delta }_{2} \subseteq [0, 2 \pi )^2\) defined by
is bijective. Since the function \(S_2\) is increasing then it is differentiable almost everywhere. Therefore, the function \(\Psi _2\) is approximately totally differentiable almost everywhere in its domain, see Theorem 1 and the following Example in [13]. Together with the change of variables via the function \(\Psi _2\), the inequality in (4.4) yields that the portion of the integral in (4.1) on \(\Delta _{2}\) is bounded from above by
where we used the result stated in Theorem 2 in [13] for changes of variables that are approximately totally differentiable almost everywhere.
As in Case I, we conclude by Hardy-Littlewood-Sobolev inequality and the change of variables via the inverse of the bijective function defined in (4.5).
Case III: \((s,t) \in \Delta _{3}\). For \(S_3(t)\) defined by
we have
We conclude as in Case II, with the change of variables via the bijective function \(\Psi _3 :\Delta _{3} \rightarrow \widetilde{\Delta }_{3} \subseteq [0, 2 \pi )^2\) defined by
Case IV: \((s,t) \in \Delta _{4}\). We have
We conclude as in Case I, with the change of variables via the bijective function \(\Psi _4 :\Delta _{4} \rightarrow \widetilde{\Delta }_{4} \subseteq [0, 2 \pi )^2\) defined by
\(\square \)
Next, we prove the boundedness of the maximal Fourier restriction operator uniformly in the convex curve stated in Theorem 1.3.
Proof of Theorem 1.3
The proof follows a standard argument that we repeat for the sake of completeness. Let \(g \in L^\infty ({\mathbb {R}}^2)\) be a function normalized in \(L^\infty ({\mathbb {R}}^2)\). Let R be a measurable function associating a point in \(\Gamma \) to a rectangle centred at the origin with sides parallel to the axes. We consider the linearised maximal Fourier restriction operator \({\mathcal {M}}_{g,R}\) defined as follows. For every Schwartz function \(f \in {\mathcal {S}}({\mathbb {R}}^2)\) we define
We aim at proving boundedness properties for \({\mathcal {M}}_{g,R}\) with constants independent of the linearising function R.
The operator is bounded from \(L^1({\mathbb {R}}^2)\) to \(L^\infty (J, \nu )\). To prove its boundedness properties near \(L^{4/3}({\mathbb {R}}^2)\), we introduce the bump function
and, by Plancherel, we rewrite
The adjoint operator \({\mathcal {M}}_{g,R}^*\) with respect to the \(L^1(J, \nu )\)-pairing is defined by
By Lemma 4.2, for \(1 \le r < 2\) we have
hence, for \(1 \le p < 4/3\) we have the desired result
where \(\left\Vert {\cdot }\right\Vert _{{{\,\textrm{op}\,}}}\) stands for the norm of the operator and \(p' = 2r'\). \(\square \)
Finally, we prove the corollaries.
Proof of Corollary 1.4
For every function \(f \in {\mathcal {S}}({\mathbb {R}}^2)\) we define the function g by
In particular, we have
Therefore, the function \({\mathcal {M}}_g \widehat{f}\) dominates the function \(\left|{\widehat{f}}\right|\), and the desired result follows from Theorem 1.3. \(\square \)
Proof of Corollary 1.5
The desired result holds true for every function \(f \in {\mathcal {S}}({\mathbb {R}}^2)\).
For \(1 \le p < 4/3\), the desired result for every function \(f \in L^p({\mathbb {R}}^2)\) follows from a standard approximation argument and the boundedness properties of the maximal operator stated in Theorem 1.3. \(\square \)
References
Bak, J.-G., Ham, S.: Restriction of the Fourier transform to some complex curves. J. Math. Anal. Appl. 409(2), 1107–1127 (2014)
Bak, J.-G., Oberlin, D.M., Seeger, A.: Restriction of Fourier transforms to curves. II. Some classes with vanishing torsion. J. Aust. Math. Soc. 85(1), 1–28 (2008)
Bak, J.-G., Oberlin, D.M., Seeger, A.: Restriction of Fourier transforms to curves and related oscillatory integrals. Am. J. Math. 131(2), 277–311 (2009)
Bak, J.-G., Oberlin, D.M., Seeger, A.: Restriction of Fourier transforms to curves: an endpoint estimate with affine arclength measure. J. Reine Angew. Math. 682, 167–205 (2013)
Carleson, L., Sjölin, P.: Oscillatory integrals and a multiplier problem for the disc. Studia Math. 44, 287–299 (1972) (errata insert)
Dendrinos, S., Stovall, B.: Uniform estimates for the X-ray transform restricted to polynomial curves. J. Funct. Anal. 262(12), 4986–5020 (2012)
Dendrinos, S., Stovall, B.: Uniform bounds for convolution and restricted X-ray transforms along degenerate curves. J. Funct. Anal. 268(3), 585–633 (2015)
Drury, S.W.: Degenerate curves and harmonic analysis. Math. Proc. Cambridge Philos. Soc. 108(1), 89–96 (1990)
Drury, S.W., Marshall, B.P.: Fourier restriction theorems for curves with affine and Euclidean arclengths. Math. Proc. Cambridge Philos. Soc. 97(1), 111–125 (1985)
Drury, S.W.: Restrictions of Fourier transforms to curves. Ann. Inst. Fourier (Grenoble) 35(1), 117–123 (1985)
Fefferman, C.: Inequalities for strongly singular convolution operators. Acta Math. 124, 9–36 (1970)
Gressman, P.T.: On the Oberlin affine curvature condition. Duke Math. J. 168(11), 2075–2126 (2019)
Hajłasz, P.: Change of variables formula under minimal assumptions. Colloq. Math. 64(1), 93–101 (1993)
Jesurum, M.: Fourier restriction to smooth enough curves. arXiv:2204.10257 (2022)
Jesurum, M.: Maximal operators and Fourier restriction on the moment curve. Proc. Am. Math. Soc. 150(9), 3863–3873 (2022)
Kovač, V.: Fourier restriction implies maximal and variational Fourier restriction. J. Funct. Anal. 277(10), 3355–3372 (2019)
Kovač, V., Oliveira e Silva, D.: A variational restriction theorem. Arch. Math. (Basel) 117(1), 65–78 (2021)
Müller, D., Ricci, F., Wright, J.: A maximal restriction theorem and Lebesgue points of functions in \(\cal{F} (L^p)\). Rev. Mat. Iberoam. 35(3), 693–702 (2019)
Oberlin, D.M.: Convolution with affine arclength measures in the plane. Proc. Am. Math. Soc. 127(12), 3591–3592 (1999)
Oberlin, D.M.: Fourier restriction for affine arclength measures in the plane. Proc. Am. Math. Soc. 129(11), 3303–3305 (2001)
Oberlin, D.M.: Affine dimension: measuring the vestiges of curvature. Michigan Math. J. 51(1), 13–26 (2003)
Ramos, J.P.G.: Maximal restriction estimates and the maximal function of the Fourier transform. Proc. Am. Math. Soc. 148(3), 1131–1138 (2020)
Ramos, J.P.G.: Low-dimensional maximal restriction principles for the Fourier transform. Indiana Univ. Math. J. 71(1), 339–357 (2022)
Rudin, W.: Real and complex analysis, 3rd edn. McGraw-Hill Book Co., New York (1987)
Sjölin, P.: Fourier multipliers and estimates of the Fourier transform of measures carried by smooth curves in \(R^{2}\). Studia Math. 51, 169–182 (1974)
Stein, E.M.: Harmonic analysis: real-variable methods, orthogonality, and oscillatory integrals, Princeton Mathematical Series, vol. 43, Princeton University Press, Princeton, NJ, With the assistance of Timothy S. Murphy, Monographs in Harmonic Analysis, III (1993)
Stein, E.M., Shakarchi, Rami: Real analysis, Princeton Lectures in Analysis, vol. 3, Princeton University Press, Princeton, NJ, Measure theory, integration, and Hilbert spaces (2005)
Stovall, B.: Uniform \(L^p\)-improving for weighted averages on curves. Anal. PDE 7(5), 1109–1136 (2014)
Stovall, B.: Uniform estimates for Fourier restriction to polynomial curves in \({\mathbb{R} }^d\). Am. J. Math. 138(2), 449–471 (2016)
Tao, T.: Some recent progress on the restriction conjecture, Fourier analysis and convexity, pp. 217–243. Appl. Numer. Harmon. Anal, Birkhäuser Boston, Boston, MA (2004)
Tomas, P.A.: A restriction theorem for the Fourier transform. Bull. Am. Math. Soc. 81, 477–478 (1975)
Vitturi, M.: A note on maximal Fourier restriction for spheres in all dimensions. Glas. Mat. Ser. III 57(77)(2), 313–319 (2022)
Zygmund, A.: On Fourier coefficients and transforms of functions of two variables. Studia Math. 50, 189–201 (1974)
Acknowledgements
The author gratefully acknowledges financial support by the CRC 1060 The Mathematics of Emergent Effects at the University of Bonn, funded through the Deutsche Forschungsgemeinschaft. He is also supported by the Basque Government through the BERC 2022-2025 program and by the Ministry of Science and Innovation: BCAM Severo Ochoa accreditation CEX2021-001142-S / MICIN / AEI / 10.13039/501100011033. The author is thankful to João Pedro G. Ramos, Christoph Thiele and Gennady Uraltsev for helpful discussion, comments and suggestions that improved the exposition of the material, and for their support. The author is also thankful to the anonymus referees for a list of suggestions that improved the exposition of the paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A. Compact convex curves
Appendix A. Compact convex curves
1.1 A.1. Proof of Theorem 2.4
First, for every compact convex curve \(\Gamma \) we define a continuous parametrization \(\gamma \) in Lemma A.5. We achieve this formalizing the following intuition, see Fig. 2. Let \(x_0\) be a point in the bounded open convex set \(K \subseteq {\mathbb {R}}^2\), whose boundary \(\partial K\) is \(\Gamma \). We parametrize \(\Gamma \) by \({\mathbb {S}}^1\) via the unique intersection between \(\Gamma \) and each positive half-line emanating from \(x_0\). Moreover, we choose to parametrize \({\mathbb {S}}^1\) by \([0,2\pi )\) counterclockwise, hence \(\Gamma \) too.

The intuitive parametrization of \(\Gamma =\partial K\)
After that, we prove the rectifiability of every compact convex curve \(\Gamma = \partial K\) claimed in Theorem 2.4. The main ingredient in the proof is the inequality between the perimeters of convex polygons A and B such that \(A \subseteq B\) stated in Lemma A.11.
We begin with the definition of the continuous parametrization \(\gamma \) for every compact convex curve \(\Gamma = \partial K\) outlined above. We first state and prove three auxiliary lemmata.
Lemma A.1
Let \(x \in K\), \(y \in \partial K\). For every \(0 < \lambda \le 1\) we have \(\lambda x + (1-\lambda )y \in K\).
Proof
Fix \(0< \lambda \le 1\). Since \(y \in \partial K\), there exists a sequence \(\{ y_n :n \in {\mathbb {N}}\} \subseteq K\) converging to y. Moreover, the sequence \(\{ x_n :n \in {\mathbb {N}}\}\) defined by
converges to x. Therefore, there exists N such that \(x_N \in K\), yielding
\(\square \)
Lemma A.2
Let \(x_0 \in K\). The function \(T=T(x_0)\) defined by
is well-defined. Moreover, for every \(e \in {\mathbb {S}}^1\) we have
Proof
Since K is open and bounded, for every \(e \in {\mathbb {S}}^1\) we have \(T(e) \in (0,\infty )\).
Next, by the definition of T(e), there exists an increasing sequence \(\{t_n :n \in {\mathbb {N}}\} \subseteq (0,\infty )\) converging to T(e). Therefore, the sequence \(\{ x_0+t_n e :n \in {\mathbb {N}}\} \subseteq K\) converges to \(x_0+T(e)e\). Since for \(T(e)<t< \infty \) the point \(x_0+te \in {\mathbb {R}}^2 \setminus K\), then \(x_0+T(e)e \in \partial K\).
To conclude, suppose there exists \(t >0\), \(t \ne T(e)\) such that \(x_0+te \in \partial K\).
If \(t< T(e)\), by Lemma A.1 we have \(x_0+te \in K\), yielding a contradiction with \(x_0+te \in \partial K\).
If \(t> T(e)\), the same argument yields a contradiction with \(x_0 +T(e)e \in \partial K\). \(\square \)
Lemma A.3
Let \(x_0 \in K\). For \(T=T(x_0)\) the function \(\tau = \tau (x_0)\) defined by
is well-defined and bijective
Proof
The function is well-defined by Lemma A.2.
Injective. Suppose there exist \(e_1,e_2 \in {\mathbb {S}}^1\), \(e_1 \ne e_2\) such that
If \(e_1 \ne -e_2\), they are two linearly independent vectors, hence \(T(e_1)=T(e_2)=0\), yielding a contradiction with \(T(e_1),T(e_2)>0\).
If \(e_1=-e_2\), then \(T(e_1)=-T(e_2)\). Since \(T(e_1)>0\), then \(T(e_2)<0\), yielding a contradiction with \(T(e_2)>0\).
Surjective. Let \(x \in \partial K\) and consider
Then \(x \in \partial K \cap \{ x_0+te :t \ge 0 \}\). By Lemma A.2, we have \(x = x_0+T(e)e\). \(\square \)
The remaining ingredient to define \(\gamma \) is the following collection of parametrizations of \({\mathbb {S}}^1\).
Definition A.4
Let \(e \in {\mathbb {S}}^1 \subseteq {\mathbb {R}}^2\). We define the the counterclockwise continuous parametrization \(\Theta = \Theta (e)\) of the circle \({\mathbb {S}}^1\) with starting point e by
In particular, for every \(x_1 \in \partial K\) let \(\Theta = \Theta (x_1)\) be the counterclockwise continuous parametrization of the circle \({\mathbb {S}}^1\) with starting point \(\tau ^{-1}(x_1) \in {\mathbb {S}}^1\).
Lemma A.5
Let \(x_0 \in K\), \(x_1 \in \Gamma = \partial K\). For \(\tau = \tau (x_0)\), \(\Theta = \Theta (x_1)\) the function \(\gamma = \gamma (x_0,x_1)\) defined by
is well-defined, bijective and continuous.
Proof
The function is well-defined and bijective by Lemma A.3 and the definition of \(\Theta \). The continuity of \(\gamma \) follows from that of \(\Theta \) and \(T \circ \Theta \).
It is enough to prove that the function \(T \circ \Theta \) is continuous. We argue by contradiction and we suppose that it has a discontinuity in \(\theta \). Let \(\{\theta _n :n \in {\mathbb {N}}\}\) be a sequence converging to \(\theta \) such that \(\{ T(\Theta (\theta _n)) :n \in {\mathbb {N}}\}\) does not converge to \(T(\Theta (\theta ))\). In particular, there exists \(\varepsilon > 0\) and a subsequence \(\{ \theta _n :n \in M \subseteq {\mathbb {N}}\} \subseteq \{\theta _n :n \in {\mathbb {N}}\}\) such that
Since K is compact, there exists a subsequence \(\{ \theta _n :n \in \widetilde{M} \subseteq M \} \subseteq \{\theta _n :n \in M \}\) such that the limit of \(\{ T(\Theta (\theta _n)) :n \in \widetilde{M} \}\) exists and is \(\widetilde{T} \ne T(\Theta (\theta ))\). We distinguish two cases.
Case I: \(\widetilde{T} > T(\Theta (\theta ))\). Fix t such that \(\widetilde{T}> t > T(\Theta (\theta ))\). The sequence
converges to \(x_0+t \Theta (\theta )\). Therefore, we have \(x_0+t \Theta (\theta ) \in K \cup \partial K\). Then, by the convexity of K and Lemma A.1, we have \(x_0+T(\Theta (\theta )) \Theta (\theta ) \in K\), yielding a contradiction with \(x_0+T(\Theta (\theta )) \Theta (\theta ) \in \partial K\).
Case II: \(T(\Theta (\theta )) > \widetilde{T}\). Fix t such that \( T(\Theta (\theta ))> t > \widetilde{T} \). The sequence
converges to \(x_0+t \Theta (\theta )\). Therefore, we have \(x_0+t \Theta (\theta ) \in {\mathbb {R}}^2 {\setminus } K\). However, by Lemma A.1, we have \(x_0+t \Theta (\theta ) \in K\), yielding a contradiction. \(\square \)
We continue with the proof that every compact convex curve \(\Gamma = \partial K\) is rectifiable. We first recall the definition of rectifiability.
Definition A.6
Let \(\gamma :I \rightarrow \Gamma \subseteq {\mathbb {R}}^2\) be a continuous parametrization of a curve, where \(I \subseteq {\mathbb {R}}\) is a bounded interval of either of the following forms
Let \(P=\{P_0,\dots ,P_k\}\) be a finite and strictly increasing collection of points in I, namely \(P_0< P_1< \dots < P_k\). Let \(\sigma _{\gamma (P)}\) be the polygonal curve given by the segments between \(\gamma (P_{i})\) and \(\gamma (P_{i+1})\). Let \(\ell (\sigma _{\gamma (P)})\) be the length of \(\sigma _{\gamma (P)}\) defined by
Let \({\mathcal {P}}\) be the set of all possible finite and strictly increasing collections of points in I. The curve \(\gamma (I)\) is rectifiable if
and we call \(\ell (\gamma (I))\) the length of \(\gamma (I)\).
Remark A.7
If \(I = [a,b]\), without loss of generality we consider only finite and strictly increasing collections \(\{P_0, \dots , P_k\}\) of points in I such that \(P_0 = a\), \(P_k = b\).
Now, for every parametrization \(\gamma :[0, 2 \pi ) \rightarrow \Gamma = \partial K\) we define the parametrization \(\widetilde{\gamma } :[0, 2 \pi ] \rightarrow \Gamma = \partial K\) by
In particular, for \(\widetilde{\gamma }\) we can apply the observation made in Remark A.7. Moreover, it is straight-forward to observe that \(\ell (\gamma ([0,2\pi ))) = \ell (\widetilde{\gamma }([0,2\pi ]))\). Therefore, with a slight abuse of notation, we denote by \(\gamma \) also \(\widetilde{\gamma }\).
Moreover, we introduce the auxiliary definition of convex hull we use in the remaining part of the Appendix.
Definition A.8
Let \(Q = \{ Q_1, \dots , Q_k \}\) be a finite collection of points in \({\mathbb {R}}^2\). The open convex hull \({{\,\textrm{ch}\,}}(Q)\) is defined by
Next, we state and prove three auxiliary lemmata.
Lemma A.9
Let \(x,y \in \Gamma = \partial K\), \(x \ne y\). Let \(\gamma =\gamma (x) :[0,2 \pi ] \rightarrow \Gamma = \partial K\) be the counterclockwise parametrization such that \(\gamma (0)=x\). Let \(s \in (0,2 \pi )\) be such that \(\gamma (s)=y\). Then the two pieces \(\gamma ((0,s))\) and \(\gamma ((s,2\pi ))\) of the curve \(\Gamma \) are in the closure of the distinct half-planes defined by the line l passing through x and y.

The open subsets A, B, C in Case II
Proof
Let \(x_0 \in K\). Let \(l_x\) be the half-line emanating from \(x_0 \) and passing through x, and \(l_y\) the half-line emanating from \(x_0\) and passing through y. We distinguish three cases.
Case I: \(s=\pi \). Then \(l_x,l_y \subseteq l\), and the statement is satisfied.
Case II: \(s<\pi \). In particular, \(x_0 \notin l\). Let \(H_0\) be the open half-plane such that \(\partial H_0 = l\) and \(x_0 \in H_0\). The piece \(\gamma ((0,s))\) of the curve \(\Gamma \) is in the section of the plane defined by the counterclockwise angle from \(l_x\) to \(l_y\). We claim that \(\gamma ((0,s)) \subseteq H_0^c\). We argue by contradiction and we suppose that there exists \(0<u<s\) such that \(\gamma (u)\) belongs to the open subset \(C = {{\,\textrm{ch}\,}}( x,y,x_0 ) \subseteq K\), see Fig. 3. Then \(\gamma (u) \in K\), yielding a contradiction with \(\gamma (u) \in \partial K\).
Let \(\Pi \) be the open section of the plane defined by the counterclockwise angle from \(l_y\) to \(l_x\). Let A and B be the connected open subsets of the plane such that \(A \cap B = \varnothing \), \(A \cup B = \Pi \cap ( H_0 \cup \partial H_0)^c\), \(x \in \partial A\) and \(y \in \partial B\), see Fig. 3. The piece \(\gamma ((s,2\pi ))\) of the curve \(\Gamma \) is in the set \(\Pi \). We claim that \(\gamma ((s,2\pi )) \subseteq H_0 \cup \partial H_0\). We argue by contradiction and we suppose that there exists \(s<u<2 \pi \) such that \(\gamma (u)\) belongs to either of the subsets A and B. Without loss of generality, we assume \(\gamma (u) \in A\). Then \(x \in {{\,\textrm{ch}\,}}( \gamma (u),y,x_0 ) \subseteq K\), yielding a contradiction with \(x \in \partial K\).
Case III: \(s >\pi \). We proceed as in Case II, switching the arguments for the two subcases. \(\square \)
Lemma A.10
Let \(\gamma :[0,2\pi ] \rightarrow \Gamma \subseteq {\mathbb {R}}^2 \) be a parametrization of a compact convex curve \(\Gamma \). Let \(P = \{ P_0, \dots , P_k \}\) be a finite and strictly increasing collection of points in \([0,2\pi ]\) such that \(P_0 = 0\), \(P_k = 2 \pi \). Then the open convex hull \({{\,\textrm{ch}\,}}(\gamma (P))\) is an open convex polygon, and \(\partial {{\,\textrm{ch}\,}}(\gamma (P)) = \sigma _{\gamma (P)}\).
Proof
Consider the segment between \(\gamma (P_j)\) and \(\gamma (P_{j+1})\). By Lemma A.9, all the points in \(\gamma (P)\) are in the same closed half-plane defined by the line passing through \(\gamma (P_j)\) and \(\gamma (P_{j+1})\). Therefore, the open convex hull \({{\,\textrm{ch}\,}}(\gamma (P) )\) is in the same closed half-plane, and the segment between \(\gamma (P_j)\) and \(\gamma (P_{j+1})\) belongs to the boundary \(\partial {{\,\textrm{ch}\,}}( \gamma (P) )\).
Lemma A.11
Let A, B be two convex polygons such that \(A \subseteq B\). Then
Proof
We prove the claim by induction on the number n of sides of \(\partial A\) that are not contained in \(\partial B\). If \(n=0\), then \(A=B\) and the desired inequality is satisfied.
Next, suppose that there are \(n \ge 1\) sides of \(\partial A\) that are not contained in \(\partial B\). We choose one, we draw the line l defined by it, and we let H be the closed half-plane defined by l containing A, see Fig. 4. Then \(C= B \cap H\) is a convex polygon and, by triangle inequality, we have
We observe that there are \(n-1\) sides of \(\partial A\) that are not contained in \(\partial C\). Therefore, by induction hypothesis, we obtain the desired inequality. \(\square \)

The inductive step
Proof of Theorem 2.4
Let B(0, R) be a ball centred at the origin with radius R containing K. Let \(\Delta \) be an equilateral triangle containing B(0, R).
By Lemma A.10, for every finite and strictly increasing collection \(P = \{P_0, \dots , P_k\}\) of points in \([0,2\pi ]\) such that \(P_0 = 0\), \(P_k = 2 \pi \) the open convex hull \({{\,\textrm{ch}\,}}( \gamma (P) )\) is an open convex polygon contained in \(\Delta \). Moreover, we have \(\sigma _{\gamma (P)}= \partial {{\,\textrm{ch}\,}}( \gamma (P) )\).
By Lemma A.11, we have
\(\square \)
Remark A.12
Let \(x_0 \in K\), \(x_1 \in \Gamma = \partial K\). Let \(\gamma = \gamma (x_0, x_1) :[0,2\pi ) \rightarrow \Gamma \) be the counterclockwise parametrization defined in Lemma A.5. Let \(z = z(x_1) :[0,\ell (\Gamma )) \rightarrow \Gamma \) be the counterclockwise affine arclength parametrization defined by
The function \(\gamma ^{-1}\circ z\) is strictly increasing, because both \(\gamma \) and z are counterclockwise parametrizations.
1.2 A.2. Proofs of Theorem 2.5, Theorem 2.6, and Theorem 2.7
We introduce two auxiliary functions \(\theta _l\) and \(\theta _r\) defined geometrically in every point of the convex curve \(\Gamma =\partial K\) by the minimal cone centred at the point and containing the convex set K. These functions are strictly related to the left and right derivatives of the arclength parametrization z of \(\Gamma \), and are helpful in proving the desired theorems.
Definition A.13
Let x be a point in \(\Gamma = \partial K\). The cone \(E_x\) is defined by

Two instances of \(E_x\)
See Fig. 5.
Lemma A.14
For every \(x \in \Gamma = \partial K\) we have \({\mathbb {S}}^1 {\setminus } E_x \ne \varnothing \).
Proof
We argue by contradiction and we suppose that \(E_x= {\mathbb {S}}^1\). We fix any arbitrary counterclockwise parametrization \(\Psi :[0, 2 \pi ) \rightarrow {\mathbb {S}}^1\) as in Definition A.4. Let \(y_1,y_2,y_3 \in \partial K\) be the points corresponding to the directions \(e_1 = \Psi (\pi /3)\), \( e_2 = \Psi (\pi )\), and \(e_3 = \Psi (5 \pi /3)\). Therefore, we have \(x \in {{\,\textrm{ch}\,}}(y_1,y_2,y_3) \subseteq K\), yielding a contradiction with \(x \in \partial K\). \(\square \)
The previous result guarantees that the following definition is meaningful. For every \(x \in \Gamma = \partial K\) let \(e_0 = e_0(x) \in {\mathbb {S}}^1 {\setminus } E_x\). Moreover, let \(\Phi = \Phi (e_0) :[0, 2 \pi ) \rightarrow {\mathbb {S}}^1\) be the counterclockwise parametrization of the circle with starting point \(e_0\) as in Definition A.4.
Lemma A.15
For every \(x \in \Gamma = \partial K\) we have that \(\Phi ^{-1}(E_x)\) is an interval with extremal points \(a,b \in [0,2\pi )\) satisfying
Proof
Let \(\theta _1, \theta _2 \in \Phi ^{-1} (E_x)\) such that \(\theta _1 < \theta _2\). We claim that for every \(\theta \in [0, 2 \pi )\), \(\theta _1< \theta < \theta _2\) we have \(e = \Phi (\theta ) \in E_x\).
By the definition of \(\Phi \), we have \(\theta _1 \ne 0\) and \(\theta _2 \ne 2 \pi \). Now, let \(e_1, e_2 \in {\mathbb {S}}^1\) be defined by
and let \(y_1,y_2 \in \partial K\) be defined by
We distinguish three cases.
Case I: \(\theta _2>\theta _1+\pi \). We have
yielding a contradiction with \(e_0 \notin E_x\).
Case II: \(\theta _2<\theta _1+\pi \). We have
hence \(\theta \in \Phi ^{-1}(E)\).
Case III: \(\theta _2=\theta _1+\pi \). By Case I, we have
Let \(y \in K\). It belongs to one of the two half-planes defined by the line through \(y_1,x,y_2\). Therefore, we have
and we reduce to Case II for the couples \((\theta _1,\widetilde{\theta })\) and \((\widetilde{\theta },\theta _2)\).
Therefore, \( \Phi ^{-1}(E_x)\) is an interval with extremal points \(a,b \in [0, 2 \pi )\). By Case I, we obtain the desired relation between a, b described in (A.1). \(\square \)
In particular, \(\Gamma = \partial K\) is contained in the closed section of the plane defined by the half-lines \(\{ x+t \Phi (a) :t \ge 0 \}\) and \(\{ x+t \Phi (b) :t \ge 0 \}\). Now, for every \(x \in \Gamma = \partial K\) let \(E_x\) be the cone as in Definition A.13 and let \(e_0(x) \in {\mathbb {S}}^1 {\setminus } E_x\). Next, let \(\Phi _{x} :[0, 2\pi ) \rightarrow {\mathbb {S}}^1\) be the counterclockwise parametrization of the circle with starting point in \(e_0(x)\) as in Definition A.4. After that, let \(x_1 \in \Gamma = \partial K\) and let the arclength parametrization \(z = z(x_1) :J \rightarrow \Gamma \) be defined as in Remark A.12. Then, we choose the counterclockwise parametrization of the circle \(\Upsilon = \Upsilon (x_1) :[0,2\pi ) \rightarrow {\mathbb {S}}^1\) with starting point
as in Definition A.4. Finally, we define the functions \(\theta _l :(0,\ell (\Gamma )] \rightarrow [0, 2 \pi )\) and \(\theta _r :[0,\ell (\Gamma )) \rightarrow [0,2 \pi )\) by
Lemma A.16
For all \(s,t \in (0,\ell (\Gamma ))\), \(s < t\) we have
Moreover, for every \(s \in (0,\ell (\Gamma ))\) we have
Proof
The first inequality in (A.2) follows from
The second inequality in (A.2) follows from Lemma A.15 and the definition of a counterclockwise parametrization of \({\mathbb {S}}^1\) in Definition A.4. The first and the third inequalities in (A.3) follow from the chain of inequalities in (A.4). \(\square \)
Lemma A.17
The functions \(\theta _l\) and \(\theta _r\) are increasing and have bounded variation. Moreover, they coincide m-almost everywhere.
Proof
By Lemma A.16, the functions \(\theta _l\) and \(\theta _r\) are increasing. Moreover, they take values in a bounded set, hence they have bounded variation.
Now, suppose that the functions \(\theta _l\) and \(\theta _r\) do not coincide m-almost everywhere. Therefore, there exists an uncountable collection \(X \subseteq (0,\ell (\Gamma ))\) of points such that for every \(x \in X\) we have
Hence, we have
yielding a contradiction with \(\theta _r([0,\ell (\Gamma )) \subseteq [0,2\pi )\). \(\square \)
Lemma A.18
Fix \(s \in J\) and consider the function \(\phi = \phi _s\) defined by
Then, the function \(\phi \) is increasing.
Proof
For all \(t, u \in J {\setminus } \{ s\}\), \(t < u\) we claim that
Let \(x_0 \in K\), \(x_1 \in \Gamma = \partial K\), and let \(\gamma = \gamma (x_0,x_1)\) and \(z = z(x_1)\) be the associated parametrizations as in Remark A.12. Moreover, we consider the points z(s), z(t), and z(u). By Remark A.12, we have
We distinguish three cases according to the relation between s, t, and u.
Case I: \(s< t < u\). We distinguish five additional subcases.
Case I.i. We assume
By Lemma A.15, the points z(t) and z(u) belong to distinct open half-planes defined by the line passing through z(s) and \(\gamma (\gamma ^{-1}(z(s))+\pi )\). Moreover, let \(e_0 \in {\mathbb {S}}^1\) be defined by
In particular, we have
By Lemma A.15, we have that \(-e_0\) belongs to the interior of \(E_{z(s)}\), hence we have \(e_0 \in {\mathbb {S}}^1 {\setminus } E_{z(s)}\). Let \(\Phi _{z(s)} :[0,2\pi ) \rightarrow {\mathbb {S}}^1\) be the counterclockwise parametrization of the circle with starting point in \(e_0\) as in Definition A.4. To prove the desired inequality in (A.5), it is enough to prove the inequality
To prove the desired inequality in (A.6), we argue by contradiction and we suppose that
Therefore, the points z(t) and z(u) belong to the same open half-plane defined by the line passing through z(s) and \(\gamma (\gamma ^{-1}(z(s))+\pi )\), yielding a contradiction.
Case I.ii. We assume
Let \(l_s\) and \(l_u\) be the half-lines emanating from \(x_0\) and passing through z(s) and z(u) respectively. Since the parametrization z is counterclockwise, the point z(t) belongs to the open section of the plane defined by the angle strictly smaller than \(\pi \) between \(l_s\) and \(l_u\). To prove the desired inequality in (A.5), we argue by contradiction and we suppose that \(\phi (u) < \phi (t)\). Let \(l'_u\) and \(l'_s\) be the half-lines emanating from z(s) and passing through z(u) and \(x_0\) respectively. Since \(\phi (u) < \phi (t)\), the point z(t) belongs to the open section of the plane defined by the angle strictly smaller than \(\pi \) between \(l'_u\) and \(l'_s\). Therefore, we obtain
yielding a contradiction with \(z(t) \in \Gamma = \partial K\).
Case I.iii. We assume
We argue by contradiction and we suppose that \(\phi (u) < \phi (t)\). Analogously to Case I.ii, we obtain
yielding a contradiction with \(z(u) \in \Gamma = \partial K\).
Case I.iv. We assume
The desired inequality in (A.5) follows from the fact that the parametrizations z, \(\gamma \), and \(\Upsilon \) are counterclockwise.
Case I.v. We assume
We prove the desired inequality in (A.5) analogously to Case I.iv.
Case II: \(t< u < s\). We distinguish five additional subcases and we prove the desired inequality in (A.5) analogously to Case I.
Case III: \(t< s < u\). We prove the desired inequality in (A.5) by Case I applied to \(\phi _t\) and Case II applied to \(\phi _u\). \(\square \)
Lemma A.19
The function \(\theta _r\) is right-continuous, and the function \(\theta _l\) is left-continuous.
Proof
We focus on the case of the function \(\theta _r\). The case of the function \(\theta _l\) is analogous.
We want to prove that for every \(s \in J\) we have
We fix \(s \in J\). By Lemma A.17, the limit is an infimum and it is enough to prove that for every \(\varepsilon > 0\) there exists \(t > s\) such that
By the definition of \(\theta _r\), there exists \(u \in J\), \(u > s\) such that
By Lemma A.9, the piece z((s, u)) of the curve \(\Gamma \) is in the closure of the half-plane defined by the line passing through z(s) and z(u). In particular, by the definition of \(\theta _r\) and \(\theta _l\), and Lemma A.18, for every \(t \in J\), \(s< t < u\) we have
We distinguish two cases.
Case I. We assume
Then, we have \(\theta _l(u) = \theta _r(s)\). By Lemma A.16, for every \(t \in J\), \(s< t < u\) we have
Case II. We assume
Then, we have \(\theta _l(u) > \theta _r(s)\). By Lemma A.15, there exists \(t \in J\), \(s< t < u\) such that
Together with the definition of \(\theta _r\), the inequalities in (A.7) and (A.8) yield
\(\square \)

The obtuse triangle \({{\,\textrm{ch}\,}}(z(s),z(t),y(s,t))\) shaded in blue and the associated right-triangle in black
We turn now to the derivatives \(z_l'\) and \(z_r'\) and their relation with the functions \(\theta _l\) and \(\theta _r\).
Proof of Theorem 2.5
In the proof that the derivatives are well-defined, we focus on the case of the right derivative \(z'_r\). The case of the left derivative \(z'_l\) is analogous.
We want to prove that for every \(s \in J\) the limit
is well-defined in \({\mathbb {S}}^1\).
We fix \(s \in J\), we choose \(\varepsilon >0\) such that \( s + \varepsilon \in J\). First, we consider the function \(\psi = \psi (s)\) defined by
By the definition of \(\theta _r\) and Lemma A.18, the following limit exists and we have
Moreover, by the definition of \(\theta _r\), for every \(\delta >0\) there exists \(t \in J\), \(t > s\) such that
Therefore, by Lemma A.18 we have
To conclude that \(z_r'\) is well-defined in \({\mathbb {S}}^1\), it is enough to prove that
By Lemma A.19, for \(\rho > 0\) small enough we have
For every \(t \in (s,s+\rho )\) let y(s, t) be the intersection between the half-line emanating from z(s) in the direction \(\Upsilon ^{-1}(\theta _r(s))\) and the half-line emanating from z(t) in the direction \(- \Upsilon ^{-1}(\theta _l(t))\). By the inequalities in (A.11), the arc z([s, t]) of the curve \(\Gamma \) is contained in the closure of the open convex hull \({{\,\textrm{ch}\,}}(z(s),z(t),y(s,t))\), which is an obtuse triangle. This obtuse triangle is contained in a right-triangle with the segment between z(s) and z(t) as hypotenuse and a cathetus on the half-line emanating from z(s) in the direction \(\Upsilon ^{-1}(\theta _r(s))\), see Fig. 6. By an argument analogous to that used to prove Theorem 2.4, we have
where \(t-s\) is the length of the arc z([s, t]) of the curve \(\Gamma \). Therefore, we have
Together with \(\left|{z(t)-z(s)}\right| \le t-s\), the inequality in the previous display yields the desired equality in (A.10).
In particular, by the equality in (A.9), we proved
Therefore, by Lemma A.17, the functions \(z'_l\) and \(z'_r\) coincide m-almost everywhere. \(\square \)
Finally, we recall a result about the differentiability of a function of bounded variation.
Theorem A.20
(Stein and Shakarchi [27], Theorem 3.4) Let \(a,b \in {\mathbb {R}}\). If F is of bounded variation on [a, b], then F is differentiable almost everywhere.
Proof of Theorem 2.6
By Lemma A.17, the functions \(\theta _l\) and \(\theta _r\) have bounded variation. By Theorem A.20, they admit derivatives \(\theta _l'\) and \(\theta _r'\) well-defined m-almost everywhere.
Moreover, by Lemma A.16, the function \(\theta _r - \theta _l\) is positive everywhere. By Lemma A.17, it has bounded variation and it is zero m-almost everywhere. By Theorem A.20, it admits a derivative m-almost everywhere, hence the derivative is zero m-almost everywhere. Therefore, the functions \(\theta '_l\) and \(\theta '_r\) coincide m-almost everywhere.
As we concluded in (A.12), we have
hence the functions \(z_l''\) and \(z_r''\) are well-defined m-almost everywhere by
In particular, they coincide m-almost everywhere. \(\square \)
Proof of Theorem 2.7
By Lemma A.16, the Borel measure \(\sigma \) on J defined in (2.1) is positive. Now, by the equalities in (A.12), for all \(a,b \in J\), \(a \le b\) we have
The metric density associated with the absolutely continuous part of \(\sigma \) with respect to the Lebesgue measure m on J is \(\kappa \).
Next, we define the Borel measure \(\sigma _r\) on J as follows. For all \(a,b \in J\), \(a \le b\) we define
The metric density associated with the absolutely continuous part of \(\sigma _r\) with respect to the Lebesgue measure m on J coincides m-almost everywhere with \(\theta _r'\).
For every \(b \in J\) we consider the sequence of sets \(\{ (b-\varepsilon , b] :\varepsilon > 0 \}\) that shrinks to b nicely as in Definition 2.1. On each of these sets, the Borel measure \(\sigma - \sigma _r\) is zero. By Theorem 2.2, the metric density associated with the absolutely continuous part of \(\sigma - \sigma _r\) with respect to the Lebesgue measure m on J is zero m-almost everywhere. Therefore, the functions \(\kappa \) and \(\theta '_r\) coincide m-almost everywhere. Analogously we prove that the functions \(\kappa \) and \(\theta '_l\) coincide m-almost everywhere. By Theorem 2.6 and the equalities in (A.13) and (A.14), for m-almost every \(t \in J\) we have
yielding the desired result. \(\square \)
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Fraccaroli, M. Uniform maximal Fourier restriction for convex curves. Annali di Matematica 203, 1643–1671 (2024). https://doi.org/10.1007/s10231-023-01417-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10231-023-01417-9