
Abstract
This paper studied about gait pattern changing of the constructed quadruped robot system using pulse-type hardware neural networks (P-HNN). We constructed the 20 cm in size prototype quadruped robot system. Quadruped robot system consisted of mechanical components and electrical components. The mechanical components consisted of four legs, body frames and four servo motors. Quadruped animal-like locomotion could realize by only four servo motors using link mechanisms to each leg. The electrical components consisted of P-HNN, power supply circuit, control board and battery. P-HNN was constructed by analog discrete circuits which could mount on top of the quadruped robot. As a result, constructed P-HNN could output the locomotion rhythms which were necessary to generate the gait pattern of the quadruped robot. P-HNN could output the locomotion rhythms without using software programs or analog digital converter. In addition, P-HNN could change the locomotion rhythms by inputting the trigger pulse to the P-HNN. Our constructed quadruped robot system could perform the locomotion without using external devices.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
A Japanese robot scientist learned about a necessity of resolving a lot of problems from 2011 Tohoku earthquake and a tsunami. For example, an advanced moving system which could locomote on the uneven surface or autonomous control system which could return in the case of communication is intercepted. In these extreme situations, many types of the crawler-type or the wheel-type robot had been used. However, a human is doing the dangerous work because some robot was difficult to locomote on the uneven surface. Therefore, some researchers are studying about the multi-legged robot [1–3]. Most of the multi-legged robots were bio-inspired by the structure and the feature of living organisms to realize the excellent functions [4, 5]. Especially, the autonomous operation of the living organisms can be realized by small size biological neural networks. Therefore, some advanced studies on artificial neural networks have been applied to the robot control [6–10]. In biological neural networks, oscillatory patterns of electrical activity are a ubiquitous feature. Living organisms use several oscillatory patterns of electrical activity to realize several functions, for example, heart rhythms, movements, swallowing and so on [11, 12]. To clarify the oscillatory patterns of living organisms, synchronization phenomena of coupled neuron models have attracted our attention. Based on the synchronization phenomena, several researchers have studied about central pattern generators (CPG) for locomotion control of multi-legged robots [6–8].
We are studying about pulse-type hardware neural networks (P-HNN) for the purpose of implementation of autonomous control to the robot system without using computer programs. Living organisms have been highly autonomous controlled by the biological neural networks. Therefore, we mimic the biological neural networks by hardware model. Previously, we constructed the quadruped robot system which could locomote using locomotion rhythms generated by P-HNN [13]. However, the quadruped robot could not locomote straight because of the lack of strength of the leg. In addition, we input the external trigger pulse to the P-HNN using waveform generator to change the locomotion rhythms.
In this paper, we will propose the new quadruped robot system. Firstly, mechanical components of the quadruped robot were shown. Secondly, we will show the electrical components of P-HNN. Thirdly, we will discuss simulation results and measurement results of locomotion rhythms which were generated by using P-HNN. Finally, we will show the locomotion of our quadruped robot system.
2 General instructions
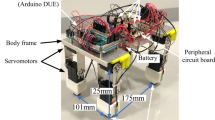
We construct the new quadruped robot system which is 140, 170 and 200 mm width, length, and height in size (Fig. 1). Quadruped robot system consists of mechanical components and electrical components. The mechanical components consisted of four legs, body frames and four servo motors. The electrical components consisted of P-HNN, power supply circuit, control board and battery. The electrical components could mount on top of the quadruped robot.

Constructed quadruped robot system
3 Mechanical components of the quadruped robot
The legs and body frames of the quadruped robot were made from aluminum base alloy 5052. The mechanical parts were machined by the computerized numerical control (CNC) machining system. Quadruped animal-like locomotion could realize by only four servo motors using link mechanisms to each leg. In this paper, we used the servomotor HSR-8498HB (Hitec Multiplex Japan) because the maximum torque was enough to actuate our quadruped robot. The previous quadruped robot system could not locomote straight because of the lack of strength of the leg [13]. Therefore, we add the strength to the leg in proposal quadruped robot system. The previous leg was fixed to one side of the servomotor. The new leg was fixed to both sides of the servomotor.
Figure 2 shows the example of the movements of link mechanism and leg. Two sets of the four-link mechanism are jointed to realize the movement of the leg. In the case of rotational angle θ of the servomotor is 70°–110°, the leg will move backward. On the other hand, in the case of θ of the servomotor is 110°–70°, the leg will move forward. Therefore, changing the rotational angle θ of servomotor, footstep of the legs could be realized. The trajectory of the red solid circle was shown by solid line. The trajectory shows that the leg can back through the air after kick the ground. As a result, constructed quadruped robot needs only four servomotors to locomote using link mechanism.

Movements of link mechanism and leg
4 Electrical components of the quadruped robot
The electrical components of the quadruped robot consist by P-HNN, power supply circuit, control bode and battery. P-HNN consists of cell body models, excitatory synaptic models and inhibitory synaptic models. In this section, we will show the circuit diagrams of cell body models and synaptic models.
4.1 Basic elements of the pulse-type hardware neural networks
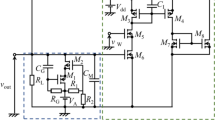
Figure 3 shows the circuit diagram of the cell body model. The cell body model consists of a voltage control-type negative resistance, an equivalent inductance, resistor R1, R2 and membrane capacitor C M. The voltage control-type negative resistance circuit with equivalent inductance consists of the n-channel MOSFET M 1, the p-channel MOSFET M 2, the voltage source V A, the leak resistor R L, the resistor R G and the capacitor C G. The cell body model has negative resistance property which changes with time like a biological neuron and enables the generation of a continuous pulse waveform v M by a self-excited oscillation and a separately excited oscillation. Moreover, the cell body model can switch between both oscillations by changing V A. The separately excited oscillation occurs by direct-current voltage stimulus or inputting the output voltage of synaptic model v S. The circuit parameters of the cell body model were as follows: C G = 4.7 μF, C M = 470 nF, R G = 680 kΩ, R L = 10 kΩ, R 1 = 15 kΩ, R 2 = 20 kΩ. The voltage source V A = 3.5 V. We used the BSS83 and BSH205 for M 1 and M 2, respectively.

Basic circuit diagram of cell body model
Figure 4 shows the circuit diagram of the synaptic model. Figure 4a shows the excitatory synaptic model and Fig. 4b shows the inhibitory synaptic model, respectively. The synaptic model has the spatio-temporal summation characteristics similar to those of living organisms. Synaptic model outputs the output voltage v S by spatio-temporal summate the output voltage of cell body model v M. The spatial summation characteristics are realized by the adder. Adder includes an inverting amplifier using an operational amplifier. The temporal summation characteristics are realized by the operational amplifier RC integrator.

Basic circuit diagram of synaptic model
The inhibitory synaptic model is obtained by reversing the output of the excitatory synaptic model. Figure 4 shows one input but in the P-HNN we use multi-inputs including excitatory inputs and inhibitory inputs. All circuit parameters of the synaptic model were set as a resistor as 1 MΩ and capacitor as 1 pF. We used the RC4558D for the operational amplifier.
4.2 Pulse-type hardware neural networks
The synchronization phenomena of the cell body model change by the connection of the synaptic model. The cell body model connected by excitatory synaptic model cause the in-phase synchronization. The cell body model connected by inhibitory synaptic model cause the antiphase synchronization. (For more detail, see [13, 14]). In this section, we construct the P-HNN using cell body models and synaptic models.
Figure 5 shows the connection diagram of the P-HNN. In Fig. 5, big open circles indicate cell body model, small open circles indicate excitatory synaptic model and small solid circles indicate inhibitory synaptic model, respectively. P-HNN consisted of 8 cell body models, 4 excitatory synaptic models and 16 inhibitory synaptic models. 4 set of excitatory inhibitory coupled cell body model generates the locomotion rhythms of legs (left fore limb, right fore limb, right hind limb, and left hind limb).

Connection diagram of the pulse-type hardware neural networks
Figure 6 shows the relative phase difference of quadruped patterns with walk and trot. In this figure, each limb indicates left fore limb (LF), the right fore limb (RF), the right hind limb (RH), and the left hind limb (LH), respectively. In addition, the reference of the relative phase difference is LF (0°). The quadruped locomotion patterns are regarded as different modes of coordination of the limb. Therefore, it is considered that quadruped locomotion pattern transitions arise from changing cooperation of the P-HNN that controls the inter limb coordination.

Relative phase difference of quadruped patterns
4.3 Simulation results of P-HNN
Figures 7 and 8 show the simulation result of P-HNN. The locomotion rhythm is shown in Fig. 7 is the basic locomotion rhythm of the quadruped robot “Walk”. The trigger pulse (v 1, v 2, v 3 and v 4) was inputted as the timing of “Walk”. The locomotion rhythm is shown in Fig. 8. is “Gallop”. The trigger pulse (v 1, v 2, v 3 and v 4) was inputted as the timing of “Gallop”. It is shown that our constructed P-HNN could output the locomotion rhythm according to the inputted trigger pulse timing using synchronization phenomena. In this paper, we input the trigger pulse such as a resetting pulse. Therefore, the gait patterns change suddenly after the trigger pulse inputs. Our P-HNN could generate gait patterns such as walk, pace, trot, bound and gallop [14]. As a result, constructed P-HNN could output various oscillatory patterns without using computer programs.

Simulation of locomotion rhythm (external trigger pulse as “Walk”)

Simulation of locomotion rhythm (external trigger pulse as “Gallop”)
4.4 Measured results of P-HNN
Figure 9 shows the constructed P-HNN by using surface-mounted component. Circuit size is 113 mm in length and 108 mm in width. The connection of each component is same with Fig. 5. Microcontroller 12F510 was added on the circuit board to generate the trigger pulses. Therefore, gait pattern can be changing without using an external device such as waveform generator [13].

Constructed P-HNN
Figure 10 shows the constructed power supply circuit. The power supply circuit can generate ±12 V for operational amplifier RC4558D using DC–DC converter MIWI06-24D12. The voltage source V A for cell body model generated by using three-terminal regulator LM317T.

Power supply circuit and control board
We connected the electric components such as shown in Fig. 11.

Block diagram of the electric components
Figures 12 and 13 show the example of the generated locomotion rhythm by using constructed P-HNN. Figure 12 is locomotion rhythm of walk and Fig. 13 is locomotion rhythm of Gallop, respectively.

Example of the locomotion rhythm (Walk)

Example of the locomotion rhythm (Gallop)
Figure 14 shows the example of the locomotion of the quadruped robot. The locomotion rhythm generated by P-HNN was walk (Fig. 14a) and gallop (Fig. 14b). This figure shows that constructed quadruped robot could locomote such as quadruped animal. As a result, quadruped robot could locomote by using the generated locomotion rhythms by using P-HNN. In addition, P-HNN could change the locomotion rhythms by inputting the trigger pulse to the P-HNN. The locomotion speed of the quadruped robot was 192 mm/min (walk) while that of the previous model was 342 mm/min (walk). However, the previous model could not locomote straight were proposal model can locomote straight. In addition, proposal model could perform the locomotion without using external devices such as waveform generator.

Example of locomotion of the quadruped robot
5 Conclusion
In this paper, we had discussed pulse-type hardware neural networks which can generate the locomotion rhythms of quadruped robot. As a result, we developed the following conclusions.
-
1.
Constructed quadruped robot needs only 4 servo motors to locomote by using link mechanism.
-
2.
Constructed pulse-type hardware neural networks could output various oscillatory patterns without using any computer programs.
-
3.
Quadruped robot could switch the locomotion by inputting external input to the pulse-type hardware neural networks.
In the future, we add the sensor to our quadruped robot system.
References
Fujita M, Kitano H (1998) Development of an autonomous quadruped robot for robot entertainment. Auton Robots (Kluwer Academic Publishers) 5:7–18
Mcghh RB, Iswandhi GI (1979) Adaptive Locomotion of a Multilegged Robot over Rough Terrain. IEEE Trans Syst Man Cybern 9(2):176–182
Raibert M, Blankespoor K, Nelson G, Playter R, BigDog Team (2008) BigDog, the rough-terrain quadruped robot. In: Proceedings of the 17th world congress. The International Federation of Automatic Control, pp 10822–10825
Habib MK, Watanabe K, Izumi K (2007) Biomimetics robots: from bio-inspiration to implementation. In: Proceedings of the 33rd Annual Conference of the IEEE Industrial Electronics Society, pp 143–148
Habib MK (2011) Biomimetcs: innovations and robotics. Int J Mechatron Manuf Syst 4(2):113–134
Kimura H, Fukuoka Y, Konaga K (2001) Adaptive dynamic walking of a quadruped robot using a neural system model. Adv Robot (Taylor & Francis) 15:859–878
Fukuoka Y, Kimura H, Cohen AH (2003) Adaptive dynamic walking of a quadruped robot on irregular terrain based on biological concepts. Int J Robot Res 22(3–4):187–202
Ijspeert AJ (2008) ‘Central pattern generators for locomotion control in animals and robots’: a review. Neural Netw 21(4):642–653
Schilling M, Hoinville T, Schmitz J, Cruse H (2013) Walknet, a bio-inspired controller for hexapod walking. Biol Cybern 107(4):397–419
Schilling M, Paskarbeit J, Hüffmeier A, Schneider A, Schmitz J, Cruse H (2013) A hexapod walker using a heterarchical architecture for action selection. Front Comput Neurosci 7:126. doi:10.3389/fncom.2013.00126
Delcomyn F (1980) Neural basis of rhythmic behavior in animals. Science 210:492–498
Michael AA (2002) The handbook of brain theory and neural networks, 2nd edn. MIT Press, Cambridge
Saito Ken, Ikeda Yuki, Takato Minami, Sekine Yoshifumi, Uchikoba Fumio (2015) Development of quadruped robot with locomotion rhythm generator using pulse-type hardware neural networks. Artif Life Robot 20(4):366–371
Saito K, Saeki K, Sekine Y (2009) Synchronization of coupled pulse-type hardware neuron models for CPG model. In: Proceedings of the 2009 International Joint Conference on Neural Networks, Atlanta, Georgia, USA, pp 2748–2755
Acknowledgments
This study was supported by Nihon University College of Science and Technology Project Research, Nihon University Academic Research Grant (Total research, “14-002”). We appreciate the support.
Author information
Authors and Affiliations
Corresponding author
Additional information
This study was supported by Nihon University College of Science and Technology Project Research, Nihon University Academic Research Grant (Total research, “14-002”). We appreciate the support.
About this article

Cite this article
Tanaka, D., Nagashima, D., Hidaka, T. et al. Gait pattern changing of quadruped robot using pulse-type hardware neural networks. Artif Life Robotics 22, 102–107 (2017). https://doi.org/10.1007/s10015-016-0327-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-016-0327-0