
Abstract
This paper discussed about development of quadruped robot which could perform the quadruped animal-like locomotion. Locomotion rhythm of the quadruped robot was generated using the pulse-type hardware neural networks (P-HNN). Quadruped robot had mechanical components and electrical components. The mechanical components of the quadruped robot consist of the body frame, link mechanisms, 4 legs and 4 servo motors to realize the quadruped animal-like locomotion. The body frame, link mechanisms and 4 legs were made from aluminum base alloy. The electrical components of the quadruped robot consist of control board, battery and P-HNN. P-HNN generates the locomotion rhythms using synchronization phenomena such as biological neural networks. The control board actuates the servo motors according to the generated locomotion rhythms. As a result, constructed quadruped robot could perform the quadruped animal-like locomotion using the generated locomotion rhythm, which was shown in this paper.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Although Japanese robot technology is high level on a worldwide scale, many problems became clear in an accident of a nuclear power plant. For example, advanced moving system which could locomote on uneven surface or autonomous control system which could return in the case of communication is intercepted. In these extreme situations, foreign-made robot was ahead of domestically made robot. However, it is difficult to locomote on uneven surface because most robots use the crawler-type or wheel-type moving system. Recently, biomimetic technologies which imitate the advanced moving system and autonomous control system of the living organisms have applied to robot systems [1–4]. In particular, many types of multi-legged robot had been proposed because multi-legged robot could easily locomote on uneven surface compared with crawler-type or wheel-type robot [5, 6]. In addition, to utilize the robot more effectively, robot control required more complicated and advanced technique. Programmed control by a digital system based on microcontroller has been the dominant system among the robot control [5, 7]. However, it is difficult to program the complicate autonomous operation to the microcontroller because of memory capacity. Therefore, some studies about artificial neural networks have been paid attention for applying to the robot control [8–10].
We are studying about pulse-type hardware neural networks (P-HNN) for the purpose of applying to the autonomous control system of the robot. P-HNN consists of cell body models and synaptic models which is analog electric circuit [11, 12]. Cell body models and synaptic models have same basic features of biological neurons such as threshold, refractory period, spatio-temporal summation characteristics, and enable the generation of a continuous action potentials. Our target is constructing the autonomous control system of the quadruped robot without using computer programs. Therefore, it is necessary to construct the locomotion generator using P-HNN which could generate the locomotion rhythms without using computer programs.
In this paper, P-HNN which can generate the locomotion rhythms for quadruped robot was proposed. Locomotion rhythms were generated using synchronization phenomena of cell body models. Firstly, mechanical components of quadruped robot were shown. Secondly, we will show the basic components of P-HNN. Thirdly, we discuss about locomotion rhythm generation using P-HNN. Finally, quadruped locomotion of the robot which was controlled by the P-HNN was shown. P-HNN could generate the locomotion rhythms of the quadruped robot without using any computer programs.
2 Mechanical components of the quadruped robot
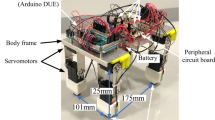
We constructed the 100, 125, 80 mm, width, length, height in size miniaturized quadruped robot system (Fig. 1). The weight of the robot system was 530 g. The quadruped robot consisted of the mechanical components and the electrical components. The mechanical components of quadruped robot consist of body frame, 4 servo motors, link mechanisms and 4 legs. 4 legs consisted by the link mechanisms and each legs used exactly same parts such as shown in Fig. 2 (Rod A, B, C, D, E, and F). The electrical components of quadruped robot consist of control board, P-HNN and battery. P-HNN was mounted to the flame retardant type 4 (FR4) circuit board. Our proposed quadruped robot cannot change the moving direction.

Constructed quadruped robot system

Mechanical parts of quadruped robot
Figure 2 shows the mechanical parts of the quadruped robot. Mechanical parts were made from aluminum base alloy 2017 and 5052. We used the aluminum base alloy 5052 for body frame and aluminum base alloy 2017 for other mechanical parts. The mechanical parts were machined by the computerized numerical control (CNC) machining system. Rod A, B, C, D, E, and F were components of link mechanisms which could assemble the single leg.
Quadruped robot system has only 4 servomotors to actuate 4 legs. Therefore, the movements to generate the locomotion of each leg were realized using link mechanisms. In this paper, we used the servomotor HSR-8498HB (Hitec Multiplex Japan) because the maximum torque was enough to actuate our quadruped robot.
Figure 3 shows the example of the movements of link mechanism and leg. 2 sets of four-link mechanism are joined to realize the movement of the leg. Rod A, Rod B and Rod C consist the primary link where Rod D, Rod E and Rod F consist the secondary link, respectively. Rod A was connected with the servomotor. In the case of clockwise rotation of servomotor, leg will move backward. On the other hand, in the case of counterclockwise rotation of servomotor, leg will move forward. Therefore, changing the rotation of servomotor, footstep of the legs could be realized. As a result, constructed quadruped robot needs only 4 servomotors to locomote using link mechanism.

Example of the movements of link mechanism and leg
3 Electrical components of the quadruped robot
The electrical components of quadruped robot consist of control board, P-HNN and battery. P-HNN consists of cell body models and synaptic models. In this section, we will show the circuit diagrams of cell body models and synaptic models.
3.1 Basic elements of the pulse-type hardware neural networks
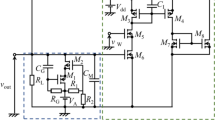
Figure 4 shows the circuit diagram of the cell body model. The cell body model consists of a voltage control-type negative resistance, an equivalent inductance, resistor R 1, R 2 and membrane capacitor C M. The voltage control-type negative resistance circuit with equivalent inductance consists of the n-channel MOSFET M 1, the p-channel MOSFET M 2, the voltage source V A, the leak resistor R L, the resistor R G and the capacitor C G. The cell body model has negative resistance property which changes with time like a biological neuron, and enables the generation of a continuous action potential v M by a self-excited oscillation and a separately excited oscillation. Moreover, the cell body model can switch between both oscillations by changing V A. The separately excited oscillation occurs by direct-current voltage stimulus or inputting the output voltage of synaptic model v S. The resistor R in is the input register of the cell body model. The cell body model is current input voltage output. Therefore, v s converted to an input current i in by R in. The circuit parameters of the cell body model were as follows: C G = 4.7 μF, C M = 470 nF, R G = 680 kΩ, R L = 10 kΩ, R 1 = 15 kΩ, R 2 = 20 kΩ. The voltage source V A = 3.3 V. We used the BSS83 and BSH205 for M 1 and M 2, respectively. These circuit parameters set as cell body model could output the pulse amplitude of 2 V, pulse period 10 s and pulse width 2.5 s oscillating pulse.

Basic circuit diagram of cell body model
Figure 5 shows the circuit diagram of the synaptic model. Figure 5a shows the excitatory synaptic model and Fig. 5b shows the inhibitory synaptic model, respectively. The all circuit parameters of the synaptic model were set as resistor as 1 MΩ and capacitor as 1 pF. We used the RC4558D for operational amplifier. The synaptic model has the spatio-temporal summation characteristics similar to those of living organisms. The excitatory synaptic model outputs the output voltage v SE by spatio-temporal summate the output voltage of cell body model v ME. The inhibitory synaptic model outputs the output voltage v SI by spatio-temporal summate the output voltage of cell body model v MI. The difference of the output voltage of cell body model v ME and v MI is only the connection of excitatory or inhibitory synaptic model. The spatial summation characteristics are realized by adder. Adder includes an inverting amplifier using an operational amplifier, the amplification factor of the inverting amplifier varies according to synaptic weight w,

Basic circuit diagram of synaptic model
where suffix E indicates excitatory and I indicates inhibitory, respectively.
The temporal summation characteristics are realized by the operational amplifier RC integrator, the time constant is τ.
The inhibitory synaptic model is obtained by reversing the output of the excitatory synaptic model. Figure 5 shows one input but in the P-HNN we use multi-inputs including excitatory inputs and inhibitory inputs.
3.2 Pulse-type hardware neural networks
The synchronization phenomena of the cell body model change by the connection of the synaptic model. The cell body model connected by excitatory synaptic model cause the in-phase synchronization. The cell body model connected by inhibitory synaptic model cause the anti-phase synchronization. (For more detail, see [11]). In this section, we construct the P-HNN using cell body models and synaptic models.
Figure 6 shows the connection diagram of the P-HNN. In Fig. 6, big open circles indicate cell body model, small open circles indicate excitatory synaptic model and small solid circles indicate inhibitory synaptic model, respectively. P-HNN consisted of 8 cell body models, 4 excitatory synaptic models and 16 inhibitory synaptic models. 4 sets of excitatory inhibitory coupled cell body model generate the locomotion rhythms of legs (left forelimb, right forelimb, right hindlimb, and left hindlimb). P-HNN was mounted with the peripheral circuit to the flame retardant type 4 (FR4) circuit board (Fig. 1).

Connection diagram of the pulse-type hardware neural networks
Figure 7 shows the relative phase difference of quadruped patterns with walk and trot. In this figure, each limb indicates left forelimb (LF), the right forelimb (RF), the right hindlimb (RH), and the left hindlimb (LH), respectively. In addition, the reference of relative phase difference is LF (0°). The quadruped locomotion patterns are regarded as different modes of coordination of the limb. Therefore, it is considered that quadruped locomotion pattern transitions arise from changing cooperation of the P-HNN that controls the inter limb coordination.

Relative phase difference of quadruped patterns with walk and trot
4 Locomotion rhythm generation for quadruped robot
4.1 Generation of basic locomotion rhythm
Example of the generated locomotion rhythm using P-HNN is shown in Fig. 8. The locomotion rhythm shown in Fig. 8 is the basic locomotion rhythm of the quadruped robot. In the case of inputting the waveform shown in the lower side of Fig. 8, the quadruped robot moves the legs as shown in the upper side of Fig. 8. On other words, generated locomotion rhythm was four phase anti-phase synchronized waveform, sequence of which is LF, RH, RF and LH. Therefore, the quadruped robot locomotes by sequence as LF, RH, RF and LH. As a result, constructed P-HNN could output various oscillatory patterns without using any computer programs. Using the constructed P-HNN, we generated the locomotion rhythms for quadruped robot.

Example of the generated locomotion rhythm (Walk)
Figure 9 shows the example of the locomotion of the quadruped robot. The locomotion rhythm generated by P-HNN was walk. This figure shows that constructed quadruped robot could locomote such as quadruped animal. As a result, quadruped robot could locomote using the generated locomotion rhythms using P-HNN.

Example of the locomotion of the quadruped robot
4.2 Switching of locomotion rhythms
Constructed P-HNN can change the locomotion rhythms by inputting the external trigger pulse. Figure 10 shows the example of changing the quadruped patterns of the quadruped robot. The external trigger pulse inputted to the external trigger pulse input port is shown in Fig. 6 using waveform generator. In the case of inputting the waveform shown in the lower side of Fig. 10 (after inputting the external trigger pulse), the quadruped robot moves the legs as shown in the upper side of Fig. 10. On other words, generated locomotion rhythm was two phase anti-phase synchronized waveform sequence of which is LF + RH and RF + LH. Therefore, the quadruped robot locomotes by sequence as LF + RH and RF + LH. P-HNN could memorize the inputted locomotion rhythm such as short memory. As a result, the quadruped robot could switch the locomotion by inputting the external input to the pulse-type hardware neural networks.

Example of changing the locomotion rhythm (from Walk to Trot)
5 Conclusion
In this paper, we had discussed about pulse-type hardware neural networks which can generate the locomotion rhythms of quadruped robot. As a result, we developed the following conclusions.
-
(a)
Constructed quadruped robot needs only 4 servomotors to locomote using link mechanism.
-
(b)
Constructed pulse-type hardware neural networks could output various oscillatory patterns without using any computer programs.
-
(c)
The quadruped robot could locomote using the generated locomotion rhythms using pulse-type hardware neural networks.
-
(d)
The quadruped robot could switch the locomotion by inputting external input to the pulse-type hardware neural networks.
The proposal robot system is prototype so there is no sensory system on the robot. In the future, we add the odor sensor to our quadruped robot system. Using the same components of pulse-type hardware neural networks, we can realize the odor sensory information processing.
References
M.K. Habib, K. Watanabe, and K. Izumi (2007), Biomimetcs robots: from bio-inspiraton to implementation. In: The 33rd Annual Conference of the IEEE Industrial Electronics Society (IECON) IECON’2007, Taipei, Taiwan, pp 143–148
Habib MK (2011) Biomimetcs: innovations and robotics. Int J Mechatron Manuf Syst 4(2):113–134
Baisch AT, Sreetharan PS, Wood RJ (2010) Biologically-inspired locomotion of a 2 g hexapod robot. IEEE IROS 2010:5360–5365
Donald BR, Levey CG, McGray CD, Paprotny I, Rus D (2006) An untethered, electrostatic, globally controllable MEMS micro-robot. J Microelectromech Syst 15:1–15
Mcghh RB, Iswandhi GI (1979) Adaptive locomotion of a multilegged robot over rough terrain. IEEE Tran Syst Man Cybern 9(2):176–182
Raibert M, Blankespoor K, Nelson G, Playter R, the BigDog Team (2008) BigDog, the rough-terrain quadruped robot. In: Proceedings of the 17th World Congress The International Federation of Automatic Control, pp 10822–10825
Fujita M, Kitano H (1998) Development of an autonomous quadruped robot for robot entertainment. Auton Robot, Kluwer Academic Publishers, Berlin, 5, pp 7–18
Kimura H, Fukuoka Y, Konaga K (2001) Adaptive dynamic walking of a quadruped robot using a neural system model. Adv Robot, Taylor & Francis 859–878
Fukuoka Y, Kimura H, Cohen AH (2003) Adaptive dynamic walking of a quadruped robot on irregular terrain based on biological concepts. Int J Robot Res 22(3–4):187–202
Aihara K, Tanabe T, Toyoda M (1990) Chaotic neural networks. Phys Lett A 144(6, 7):333–340
Saito K, Matsuda A, Saeki K, Uchikoba F, Sekine Yi (2011) Synchronization of coupled pulse-type hardware neuron models for CPG model. In: The relevance of the time domain to neural network models. Springer series on cognitive and neural systems, pp 117–33
Saito K, Takato M, Uchikoba F (2013) Silicon micro robot with neural networks. In: IGI global engineering creative design in robotics and mechatronics, pp 1–10
Acknowledgments
This study was supported by Nihon University College of Science and Technology Project Research, Nihon University Academic Research Grant (Total research, “14-002’’). We appreciate the support.
Author information
Authors and Affiliations
Corresponding author
About this article

Cite this article
Saito, K., Ikeda, Y., Takato, M. et al. Development of quadruped robot with locomotion rhythm generator using pulse-type hardware neural networks. Artif Life Robotics 20, 366–371 (2015). https://doi.org/10.1007/s10015-015-0240-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-015-0240-y