
Abstract
The aim of this paper is to introduce and study a new iterative algorithm for finding a common element of the set of fixed points of a finite family of multivalued strictly pseudo-contractive mappings and the set of solutions of equilibrium problems in Hilbert spaces. Strong convergence of the proposed method is established under suitable control conditions. Application to optimization problems with constraints is provided to support our main results. Furthermore, numerical example is given to demonstrate the implementability of our algorithm.The algorithm and its convergence results improve and develop previous results in the field.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Let H be a real Hilbert space and let C be a nonempty, closed and convex subset of H. Let F be a bifunction of C × C into \(\mathbb {R}\), where \(\mathbb {R}\) is the real numbers. The equilibrium problem for F is to find x ∈ C such that
The set of solutions is denoted by EP(F). Equilibrium problems which were introduced by Fan [9] and Blum and Oettli [10] have had a great impact and influence on the development of several branches of pure and applied sciences. Equilibrium problems include variational inequality problems as well as fixed point problems, complementarity problems, optimization, saddle point problems and Nash equilibrium problems as special cases. Equilibrium problems provide us with a systematic framework to study a wide class of problems arising in finance economics, optimization and operation research etc., which motivate the extensive concern. In recent years, equilibrium problems have been deeply and thoroughly researched, see [3, 4, 10, 12, 18, 22, 30] and the references therein. However, there are few iterative algorithms developed for the approximation of solutions of equilibrium problems.
Let (X, d) be a metric space, K be a nonempty subset of X and T : K → 2K be a multivalued mapping. An element x ∈ K is called a fixed point of T if x ∈ Tx. For single valued mapping, this reduces to Tx = x. The fixed point set of T is denoted by Fix(T) := {x ∈ D(T) : x ∈ Tx}.
A point x ∈ X is called an endpoint (or stationary point) of T if x is a fixed point of T and T(x) = {x}. We shall denote by End(T) the set of all endpoints of T. We see that for each mapping T, End(T) ⊂Fix(T). Thus, the concept of endpoints seems to be more difficult (but more important) than the concept of fixed points. However, both concepts are equivalent when T is a single-valued mapping since, in this case, End(T) = Fix(T). Next is an example of a multivalued mapping T with Fix(T)≠∅, Tp = {p} for all p ∈ Tp.
Example 1
Let \(X =\mathbb {R}\) (the reals with usual metric). Define T : [− 1,1] → 2[− 1,1] by
Then, clearly Fix(T) = {0}.
Many problems arising in different areas of mathematics, such as game theory, control theory, dynamic systems theory, signal and image processing, market economy and in other areas of mathematics, such as in non-smooth differential equations and differential inclusions, optimization theory equations, can be modeled by the equation
where T is a multivalued nonexpansive mapping. The solution set of this equation coincides with the fixed point set of T.
For several years, the study of fixed point theory for multi-valued nonlinear mappings has attracted, and continues to attract, the interest of several well known mathematicians (see, for example, Brouwer [7], Kakutani [14], Nash [19, 20]).
Nonsmooth differential equations
A large number of problems from mechanics and electrical engineering leads to differential inclusions and differential equations with discontinuous right-hand sides, for example, a dry friction force of some electronic devices. Below are two models.
a, u0 fixed in \(\mathbb {R}\). These types of differential equations do not have solutions in the classical sense. A generalized notion of solution is what is called a solution in the sense of Fillipov.
Consider the following multi-valued initial value problem.
Under some conditions, the solutions set of equations (2) and (3) coincides with the fixed point set of some multi-valued mappings.
Let K be a nonempty subset of a normed space E. The set K is called proximinal (see, e.g., [21]) if for each x ∈ E, there exists u ∈ K such that
where d(x, y) = ∥x − y∥ for all x, y ∈ E. Every nonempty, closed and convex subset of a real Hilbert space is proximinal. Let CB(K), K(K) and P(K) denote the family of nonempty closed bounded subsets, nonempty compact subsets, and nonempty proximinal bounded subsets of K respectively. The Hausdorff metric on CB(K) is defined by:
for all A, B ∈ CB(K). A multi-valued mapping \(T:D(T)\subseteq E\rightarrow CB(E)\) is called L-Lipschitzian if there exists L > 0 such that
When L ∈ (0,1), we say that T is a contraction, and T is called nonexpansive if L = 1.
Different iterative processes have been developed to approximate fixed points of multi-valued nonexpansive mappings (see, e.g., [1, 15] and the references therein) and their generalizations (see, e.g., [13]).
Recently, viscosity iterative algorithms for finding a common element of the set of fixed points for single-valued nonexpansive mappings and the set of solutions of variational inequality problems have been investigated by many authors; (see, e.g., [21, 31] and the references therein). For example, Moudafi [16] introduced the explicit viscosity approximation method for nonexpansive mappings.
Let C be a nonempty, closed and convex subset of a real Hilbert space H. Let f : C → C be a contraction mapping and T be a single-valued nonexpansive mapping on C. Let {xn} be a sequence defined by
where {αn} is a sequence in (0,1). Then, the sequence {xn} generated by (4) converges strongly to x∗∈Fix(T), which is a unique solution of the following variational inequality:
In 2007, Takahashi and Takahashi [27] investigate Moudafi’s viscosity method (4) for finding a common element of the solutions set of (1) and the fixed points set of a nonexpansive mapping in a Hilbert space, and proved the following strong convergence theorem.
Theorem 1
[27] Let Cbe a nonempty, closed and convex subset a real Hilbert space H. Let Fbe a bifunction from\( C\times C\to \mathbb {R}\)satisfying the following assumptions:
- (A1)
F(x, x) = 0 for all x ∈ C;
- (A2)
Fis monotone, i.e., F(x, y) + F(y, x) ≤ 0 for all x, y ∈ C;
- (A3)
for each x, y, z ∈ C,
$$ \lim_{t \to 0} F(tz +(1-t)x,y) \leq F(x, y); $$ - (A4)
for each x ∈ C, y → F(x, y) is convex and lower semicontinuous.
Let f : C → Cbe a contraction and T : C → Cbe a nonexpansive mapping such that Fix(T) ∩ EP(F)≠∅.
Let {xn} and {un} be sequences defined iteratively from arbitrary x0 ∈ Cby:
where {αn}⊂ (0,1) and\(\{r_{n}\}\subset ]0,\infty [\)satisfy:
- (i)
\(\lim _{n\to \infty }\alpha _{n}=0\);
- (ii)
\({\sum }_{n=0}^{\infty } |\alpha _{n}- \alpha _{n-1}| < \infty \);
- (iii)
\(\lim _{n \to \infty }\inf r_{n}> 0\) and \({\sum }_{n=0}^{\infty } |r_{n+1}- r_{n}| < \infty \).
Then, the sequences {xn} and {un} generated by (5)converge strongly to x∗∈Fix(T) ∩ EP(F).
The important class of single-valued k-strictly pseudo-contractive maps on Hilbert spaces was introduced by Browder and Petryshyn [2] as a generalization of the class of nonexpansive mappings.
Definition 1
Let K be a nonempty subset of a real Hilbert space H. A map T : K → H is called k-strictly pseudo-contractive if there exists k ∈ (0,1) such that
Motivated by approximating fixed points of multivalued mappings, Chidume et al. [8] introduced the following important class of multivalued strictly pseudo-contractive mappings in real Hilbert spaces which is more general than the class of multivalued nonexpansive mappings.
Definition 2
A multi-valued mapping \(T:D(T)\subseteq H \to CB(H)\) is said to be k-strictly pseudo-contractive, if there exists k ∈ (0,1) such for all x, y ∈ D(T), we have
If k = 1 in (6), the map T is said to be pseudo-contractive.
Remark 1
It is easily seen that any multivalued nonexpansive mapping is k-strictly pseudocontractive for any k ∈ (0,1). Moreover, the converse is not true (see, for example, Djitte and Sene [20]).
With this definition at hand, many mathematicians proved some strong convergence theorems for approximating fixed points of multivalued k-strictly pseudo-contractive mappings under some compactness conditions (see, for example, Sene et al. [24], Chidume et al. [8]).
Motivated by Takahashi and Takahashi [27] and the fact that the class of multivalued strictly pseudo-contractive mappings properly includes that of multivalued nonexpansive maps, we construct a new iterative algorithm which is a combination of Krasnoselskii–Mann algorithm and viscosity method for approximating a common element of the set of fixed points of a finite family of multivalued strictly pseudo-contractive mappings and the set of solutions of equilibrium problems which is also the solution of some variational inequality problems. Furthermore, we applied our main results to constrained convex minimization problems. The algorithm and results presented in this paper improve and extend some recents results. Finally, our method of proof is of independent interest.
2 Preliminaries
Let us recall the following definitions and results which will be used in the sequel.
Let H be a real Hilbert space. Let {xn} be a sequence in H and let x ∈ H. Weak convergence of xn to x is denoted by \(x_{n} \rightharpoonup x\) and strong convergence by xn → x. Let K be a nonempty, closed convex subset of H. The nearest point projection from H to K, denoted by PK assigns to each x ∈ H the unique PKx with the property
for all y ∈ K. It is well known that PKx satisfies
for all y ∈ K.
Definition 3
Let H be a real Hilbert space and T : D(T) ⊂ H → 2H be a multivalued mapping. I − T is said to be demiclosed at 0 if for any sequence {xn}⊂ D(T) such that {xn} converges weakly to p and d(xn, Txn) converges to zero, then p ∈ Tp.
Lemma 1
(Demiclosedness principle, [6]) Let Hbe a real Hilbert space, Kbe a nonempty closed and convex subset of H. Let T : K → CB(K) be a multivalued nonexpansive mapping with convex-values. Then I − T is demi-closed at zero.
Lemma 2
[7] Let Hbe a real Hilbert space. Then for any x, y ∈ H, the following inequality hold:
Lemma 3
(Xu, [29]) Assume that {an} is a sequence of nonnegative real numbers such that an+ 1 ≤ (1 − αn)an + αnσnfor all n ≥ 0, where {αn} is a sequence in (0,1) and {σn} is a sequence in\(\mathbb {R}\)such that
- (a)
\({\sum }_{n=0}^{\infty } \alpha _{n} = \infty \),
- (b)
\(\limsup _{n\to \infty } \sigma _{n}\leq 0\) or \({\sum }_{n=0}^{\infty } |\sigma _{n} \alpha _{n}| < \infty \).
Then\(\lim _{n\rightarrow \infty }a_{n}=0\).
Lemma 4
[17] Let Kbe a nonempty closed convex subset of a real Hilbert space H and T : K → Kbe a mapping.
- (i)
If T is a k-strictly pseudo-contractive mapping, then Tsatisfies the Lipschitzian condition
$$ \|Tx-Ty\| \leq \frac{1+k}{1-k}\|x-y\|. $$ - (ii)
If Tis a k-strictly pseudo-contractive mapping, then the mapping I − T is demiclosed at 0.
Lemma 5
(Sene et al. [24]) Let Kbe a nonempty, closed and convex subset of a real Hilbert space Hand\(\lambda _{i}\in ]0,1[, i=1,\dots ,n\)such that\({\sum }_{i=1}^{n}\lambda _{i}=1\). Then,
The following lemma appears implicitly in [10].
Lemma 6
[10] Let Cbe a nonempty closed convex subset of Hand letFbe a bifunction of C × Cinto\(\mathbb {R}\)satisfies (A1)–(A4). Let r > 0 and x ∈ H. Then, there exists z ∈ Csuch that
The following lemma was also given in [28].
Lemma 7
[28] Assume that\(F :C\times C \to \mathbb {R}\)satisfies (A1)–(A4). For r > 0 and x ∈ H, define a mapping Tr : H → Cas follows
for all x ∈ H. Then, the following hold:
- 1.
Tris single-valued;
- 2.
Tris firmly nonexpansive, i.e., ∥Tr(x) − Tr(y)∥2 ≤〈Trx − Try, x − y〉 for any x, y ∈ H;
- 3.
Fix(Tr) = EP(F);
- 4.
EP(F) is closed and convex.
3 Main Results
We now prove the following result.
Theorem 2
Let Cbe a nonempty, closed and convex subset of a real Hilbert space H. Let Fbe a bifunction from\( C\times C\to \mathbb {R}\)satisfying (A1)–(A4) and f : C → Cbe a contraction with coefficient b. Let m ≥ 1 be a fixed number and for 1 ≤ i ≤ m, let\(T_{i}:C\rightarrow CB(C)\)be a multivalued ki-strictly pseudo-contractive mapping such that\(G:= \bigcap _{i=1}^{m} \text {Fix}(T_{i}) \cap EP(F)\neq \emptyset \)and Tip = {p} ∀p ∈ G.
Let {xn} and {vn} be sequences defined iteratively from arbitrary x0 ∈ Cby
where λ0 ∈]μ,1[, \(\mu := \max \limits \{k_{i},i=1,\dots ,m\}\)and λi ∈]0,1[ such that {αn}⊂ (0,1) and\(\{r_{n}\}\subset ]0,\infty [\)satisfy:
- (i)
\(\lim _{n\to \infty }\alpha _{n}=0\),
- (ii)
\({\sum }_{n=0}^{\infty } \alpha _{n}= \infty \),
- (iii)
λ0 + λ1 + ⋯ + λm = 1,
- (iv)
\(\lim _{n\to \infty }\inf r_{n}> 0\).
Assume that the mappings I − Tiare demiclosed at the origin. Then, the sequences {xn} and {yn} generated by (7) converge strongly to x∗∈ G, which is the unique solution of the variational inequality:
Proof
From \((I-f)\) is strongly monotone and G is closed convex, then the variational inequality (8) has a unique solution in G. Below, we use x∗ to denote the unique solution of (8).
Let \(p\in G\). Then from \(v_{n}= T_{r_{n}}x_{n}\), we have
We prove that the sequences \(\{x_{n}\}\) and \(\{y_{n}\}\) are bounded. Using (7) and Lemma 5, we have
Using that, for \(i=1,\dots , m\), Tix∗ = {x∗}, we get
Since, for \(i=1,\dots ,m\), Ti is ki-strictly pseudo-contractive, we have
Hence,
Since λ0 ∈]μ,1[, we obtain
By induction, it is easy to see that
Hence, {xn} is bounded and also are {f(xn)}, and {yn}.
Consequently, by inequality (9) and property of μ we obtain
Thus, for every i, 1 ≤ i ≤ m, we get
Since {xn} and {f(xn)} are bounded, there exists a constant B > 0 such that for every i, 1 ≤ i ≤ m,
Now we prove that {xn} converges strongly to x∗. We divide the rest of the proof into two cases.
Case 1
Assume that there is n0 ∈ N such that {∥xn − p∥} is decreasing for all n ≥ n0. Since {∥xn − x∗∥} is monotonic and bounded, {∥xn − x∗∥} is convergent. Clearly, we have
This implies from (11) that
Since λ0 ∈]μ,1[, we have
Since \({u_{n}^{i}}\in T_{i}v_{n}\) for each n, it follows that
Let p ∈ G, then for each n, we have
and hence,
Therefore, from (7) and inequality (13), we get
and hence
So, we have
Next, we prove that \(\limsup _{n\to +\infty }\langle x^{\ast }-f(x^{\ast }), x^{\ast }-x_{n}\rangle \leq 0\). Since H is reflexive and {xn} is bounded, there exists a subsequence \(\{x_{n_{j}}\}\) of {xn} such that \(x_{n_{j}}\) converges weakly to a in C and
From (12) and the fact that the operators I − Ti are demiclosed, we obtain \(a\in \bigcap _{i=1}^{m} \text {Fix}(T_{i})\). Without loss of generality, we can assume that \(v_{n_{k}}\rightharpoonup a\). Let us show a ∈ EP(F). It follows by Lemma 7 and (A2) that
and hence
Since \(\frac { v_{n_{k}}-x_{n_{k}}}{r_{n_{k}}}\to 0\) and \(v_{n_{k}}\rightharpoonup a\), it follows from (A4) that F(y, a) ≤ 0 for all y ∈ C. For t with 0 < t < 1 and y ∈ C, let yt = ty + (1 − t)a. Since y ∈ C and a ∈ C, we have yt ∈ C and hence F(yt, a) ≤ 0. So, from (A1) and (A4) we have
and hence 0 ≤ F(yt, y). From (A3), we have F(a, y) ≥ 0 for all y ∈ C and hence a ∈ EP(F). Therofore, a ∈ G.
Hence,
Finally, we show that xn → x∗. From (7) and Lemma 2, we get that
From Lemma 3, its follows that xn → x∗.
Case 2
Assume that the sequence {∥xn − x∗∥} is not monotonically decreasing. Set Bn = ∥xn − x∗∥2 and \(\tau : \mathbb {N}\to \mathbb {N}\) be a mapping defined for all n ≥ n0 (for some n0 large enough) by \(\tau (n)= \max \limits \{k\in \mathbb {N} : k\leq n,~ B_{k}\leq B_{k+1}\}\).
We have τ is a non-decreasing sequence such that \(\tau (n)\to \infty \) as \(n\to \infty \) and Bτ(n) ≤ Bτ(n)+ 1 for n ≥ n0. Let \(i\in \mathbb {N}^{\ast }\), from (11), we have
Furthermore, we have
Since λ0 ∈]μ,1[, we can deduce
Since \(u_{\tau (n)}^{i}\in T_{i} v_{\tau (n)}\), it follows that
By a similar argument as in Case 1, we can show that xτ(n) and yτ(n) are bounded in C and \(\limsup _{\tau (n)\to +\infty }\langle x^{\ast }- f(x^{\ast }), x^{\ast }-x_{\tau (n)})\rangle \leq 0\). We have for all n ≥ n0,
which implies that
Then, we have
Therefore,
Furthermore, for all n ≥ n0, we have Bτ(n) ≤ Bτ(n)+ 1 if n≠τ(n) (that is, n > τ(n)); because Bj > Bj+ 1 for τ(n) + 1 ≤ j ≤ n. As consequence, we have for all n ≥ n0,
Hence, \(\lim _{n\rightarrow \infty }B_{n}=0\), that is {xn} converges strongly to x∗. This completes the proof. □
We now apply Theorem 2 when multivalued mappings are nonexpansive mappings with convex-values. In this case demiclosedness assumption is not necessary.
Theorem 3
Let Cbe a nonempty, closed and convex subset of a real Hilbert space H. Let Fbe a bifunction from\(C\times C\to \mathbb {R}\)satisfying (A1)–(A4) and f : C → Cbe a contraction with coefficient b. Let m ≥ 1 be a fixed number and 1 ≤ i ≤ m, let\(T_{i}:C\rightarrow CB(C)\)be a multivalued nonexpansive mapping and convex-values such that\(G:=\bigcap _{i=1}^{m} \text {Fix}(T_{i}) \cap EP(F)\neq \emptyset \)and Tip = {p} ∀p ∈ G.
Let {xn} and {vn} be sequences defined iteratively from arbitrary x0 ∈ Cby:
where λi ∈]0,1[, \(i=0,\dots ,m\) such that {αn}⊂ (0,1) and\(\{r_{n}\}\subset ]0,\infty [\)satisfy:
- (i)
\(\lim _{n\rightarrow \infty }\alpha _{n}=0\),
- (ii)
\({\sum }_{n=0}^{\infty } \alpha _{n}= \infty \),
- (iii)
λ0 + λ1 + ⋯ + λm = 1.
- (iv)
\(\lim _{n\rightarrow \infty }\inf r_{n}> 0\).
Then, the sequences {xn} and {vn} generated by (14) converge strongly to x∗∈ G, which is a unique solution of the following variational inequality (8).
Proof
Since every multivalued nonexpansive mapping is multivalued strictly pseudo-contractive mapping, then, the proof follows from Lemma 1 and Theorem 2. □
Since every single-valued mapping can be viewed as a multivalued mapping, we obtain from Lemma 4 the following corollary.
Corollary 1
Let Cbe a nonempty, closed and convex subset of a real Hilbert space H. Let f : C → Cbe a contraction with coefficient b. Let m ≥ 1 be a fixed number and 1 ≤ i ≤ m, let\(T_{i}:C\rightarrow C\)be a ki-strictly pseudo-contractive mapping such that\(\bigcap _{i=1}^{m}\text {Fix}(T_{i})\neq \emptyset \). Let {xn} and {vn} be sequences defined iteratively from arbitrary x0 ∈ Cby:
where λ0 ∈]μ,1[, \(\mu := \max \limits \{k_{i}, i=1,\dots ,m\}\), λi ∈]0,1[, \(i=1,\dots ,m\)and {αn} is a real sequence in (0,1) satisfying:
- (i)
\(\lim _{n\rightarrow \infty }\alpha _{n}=0\),
- (ii)
\({\sum }_{n=0}^{\infty } \alpha _{n}= \infty \),
- (iii)
λ0 + λ1 + ⋯ + λm = 1.
Then, the sequences {xn} and {vn} generated by (15) converge strongly to\(x^{\ast } \in \bigcap _{i=1}^{m} \text {Fix}(T_{i})\), which is the unique solution of the variational inequality
Proof
Put F(x, y) = 0 for all x, y ∈ C and rn = 1, we get un = xn in Theorem 2. The proof follows from Theorem 2 and Lemma 4. □
Let K be a nonempty, closed and convex subset of a real Hilbert space, let T : K → P(K) be a multivalued map and PT : K → CB(K) be defined by
We will need the following result.
Lemma 8
(Song and Cho [25]) Let Kbe a nonempty subset of a real Banach space and T : K → P(K) be a multi-valued map. Then the following are equivalent:
- (i)
x∗∈Fix(T);
- (ii)
PT(x∗) = {x∗};
- (iii)
x∗∈Fix(PT). Moreover, Fix(T) = Fix(PT).
Now, using the similar arguments as in the proof of Theorem 2 and Lemma 8, we obtain the following result by replacing T by PT and removing the rigid restriction on Fix(T) (Tp = {p} ∀p ∈ F(T)).
Theorem 4
Let Cbe a nonempty, closed and convex subset of a real Hilbert space H. Let Fbe a bifunction from\(C\times C\to \mathbb {R}\)satisfying (A1)–(A4) and f : C → Cbe a contraction with coefficient b. Let T : C → CB(C) be a multivalued mapping such that G := Fix(T) ∩ EP(F)≠∅. Assume that PTis k-strictly pseudo-contractive.
Let {xn} and {vn} be sequences defined iteratively from arbitrary x0 ∈ Cby:
where λ0 ∈]k,1[ and {αn}⊂ (0,1) and\(\{r_{n}\}\subset ]0,\infty [\)satisfy:
- (i)
\(\lim _{n\rightarrow \infty }\alpha _{n}=0\),
- (ii)
\({\sum }_{n=0}^{\infty } \alpha _{n}= \infty \),
- (iii)
\(\lim _{n\rightarrow \infty }\inf r_{n}> 0\).
Assume that the mappings I − PTis demiclosed at the origin. Then, the sequences {xn} and {yn} generated by (16) converge strongly to x∗∈ G, which is the unique solution of the variational inequality:
4 Application to Constrained Optimization Problems
Convex optimization theory is a powerful tool for solving many practical problems in operational research. In particular, it has been widely used to solve practical minimization problems over complicated constraints [5, 11], e.g., convex optimization problems with a fixed point constraint and with a variational inequality constraint. Consider the following constrained optimization problem: Let C be a nonempty, closed and convex subset a real Hilbert space H. Given a convex objective function \(g : C \to \mathbb {R}\), the problem can be expressed as
The set of solutions of (17) is denoted by Sol(g).
Proposition 1
[26] Let Hbe a real Hilbert space. Let A : H → Hbe a monotone mapping such that K := D(A) is closed and convex. Assume that Ais bounded on bounded subsets and hemi-continuous on K. Then, the bifunction F(x, y) := 〈Ax, y − x〉 satisfies conditions (A1)–(A4).
The following basic results are well known.
Lemma 9
Let Hbe a real Hilbert space and Kbe a nonempty closed and convex subset of H. Let\(g: H \to \mathbb {R}\)be a real valued differentiable convex function. Let ∇g : K → Hdenotes the differential map associated to g. Then the following hold. If gis bounded, then gis locally Lipschitzian, i.e., for every x0 ∈ Kand r > 0, there exists γ > 0 such that g is γ-Lipschitzian on B(x0, r), i.e.,
Lemma 10
Let Kbe a nonempty, closed convex subset of Hand let\(g:K\to \mathbb {R}\)a real valued differentiable convex function. Then x∗is a minimizer of gover Kif and only if x∗solves the following variational inequality 〈∇g(x∗), x − x∗〉≥ 0 for all x ∈ K.
Remark 2
Let K be a nonempty, closed convex subset of H. Let \(g: K \to \mathbb {R}\) a real valued differentiable convex function. It is well known that the differential map associated to g is monotone.
Lemma 11
Let Kbe a nonempty, closed and convex subset of a real Hilbert space Hand\(g: K \to \mathbb {R}\)be a real valued differentiable convex function. Assume that gis bounded. Then the differentiable map, ∇g : K → His bounded.
Proof
For x0 ∈ K and r > 0, let B := B(x0, r). We show that ∇g(B) is bounded. From Lemma 9, there exists γ > 0 such that
Let z∗∈∇g(B) and x∗∈ B such that z∗ = ∇g(x∗). For u ∈ H, since B is open, there exists t > 0 such that x∗ + tu ∈ B. Using the fact that z∗ = ∇g(x∗), the convexity of g and the inequality (17), it follows
So that, 〈z∗, u〉≤ γ∥u∥ ∀u ∈ H. Therefore, ∥z∗∥≤ γ. Hence, ∇g(B) is bounded. □
Theorem 5
Let Cbe a nonempty, closed and convex subset of a real Hilbert space H. Let\(g: C \to \mathbb {R}\)a real valued continuously differentiable convex and bounded function and f : C → Cbe a contraction with coefficient b. Let m ≥ 1 be a fixed number and 1 ≤ i ≤ m, let Ti : C → CB(C) be a multivalued ki-strictly pseudo-contractive mapping such that\(G:=\bigcap _{i=1}^{m} \text {Fix}(T_{i}) \cap \text {Sol}(g) \neq \emptyset \)and Tip = {p} ∀p ∈ G. Assume that I − Tiare demiclosed at the origin.
Let {xn} and {vn} be sequences generated iteratively from arbitrary x0 ∈ C by:
where λ0 ∈]μ,1[, \(\mu := \max \limits \{k_{i},~ i=1,\dots ,m\}\) and λi ∈]0,1[ such that {αn}⊂ (0,1) and \(\{r_{n}\}\subset ]0,\infty [\) satisfy:
- (i)
\(\lim _{n\rightarrow \infty }\alpha _{n}=0\),
- (ii)
\({\sum }_{n=0}^{\infty } \alpha _{n}= \infty \),
- (iii)
λ0 + λ1 + ⋯ + λm = 1,
- (iv)
\(\lim _{n\rightarrow \infty }\inf r_{n}> 0\).
Then, the sequence {xn} converges strongly to x∗ solution of (17).
Proof
Let F(x, y) := 〈∇g(x), y − x〉 for all x, y ∈ C. From the properties of g, Proposition 1, Remark 2 and Lemma 11, it follows that ∇g is monotone, continuous and bounded on bounded subset on C. So, F satisfies (A1)–(A4). Using the assumption that (17) has a solution and Lemma 10, we have x∗ is solution of (17) if and only if x∗∈ EP(F). Then, the proof follows from Theorem 2. □
5 Numerical Example
In this section, we present a numerical example to illustrate the convergence behavior of our iteration scheme (16).
Let \(\langle \cdot , \cdot \rangle : \mathbb {R}^{3}\times \mathbb {R}^{3} \to \mathbb {R}\) be the inner product defined by
and let \(\|\cdot \|: \mathbb {R}^{3} \to \mathbb {R}\) be the usual norm defined by \(\|x\|= \sqrt {{x_{1}}^{2}+{x_{2}}^{2}+{x_{2}}^{2}}\) for any \(x=(x_{1}, x_{2}, x_{3})\in \mathbb {R}^{3}\). For all \(x\in \mathbb {R}^{3}\), let \(T: \mathbb {R}^{3} \to CB(\mathbb {R}^{3})\) defined by
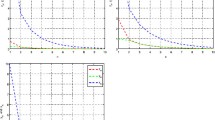
Then PT is strictly pseudo-contractive. In fact, \(P_{T}(x) = \{\frac {x}{2}\}\) for all \(x \in \mathbb {R}^{3}\). It is easy to see that Fix(T) = {0}. Let F(x, y) := y2 + yx − 2x2, \(f(x)=\frac {1}{3}x\) and \(T_{r}(x)= \{z\in \mathbb {R}^{3}, f(z, y) + \frac {1}{r} \langle y-z, z-x\rangle \geq 0~\forall y\in \mathbb {R}^{3}\}\). We can observe that \(T_{r}(x)=\frac {1}{1+3r}x\) and 0 ∈Fix(T) ∩ EP(F). Choose \(r=1,~\alpha _{n}=\frac {1}{n+1}\) and \(\lambda _{0}=\frac {1}{2}\). Then, the scheme (16) can be simplified as
Taking the initial point x1 = (1,2,3), the result of the numerical example obtained by using MATLAB is given in Fig. 1 where it is shown that the sequence of iterates {xn} strongly converges to 0.

Two dimensions
References
Berinde, V., Pǎcurar, M.: The role of the Pompeiu–Hausdorff metric in fixed point theory. Creat. Math. Inform. 22, 143–150 (2013)
Browder, F.E., Petryshyn, W.V.: Construction of fixed points of nonlinear mappings in Hilbert space. J. Math. Anal. Appl. 20, 197–228 (1967)
Bigi, G., Castellani, M., Pappalardo, M., Passacantando, M.: Nonlinear Programming Techniques for Equilibria. Springer Nature, Switzerland (2019)
Blum, E., Oettli, W.: From optimization and variational inequalities to equilibrium problems. Math. Stud. 63, 123–145 (1994)
Combettes, P.L.: A block-iterative surrogate constraint splitting method for quadratic signal recovery. IEEE Trans. Signal Process. 51, 1771–1782 (2003)
Chang, S., Tang, Y., Wang, L., Xu, Y., Zhao, Y., Wang, G.: Convergence theorems for some multi-valued generalized nonexpansive mappings. Fixed Point Theory Appl. 2014, 33 (2014)
Chidume, C.E.: Geometric Properties of Banach Spaces and Nonlinear Iterations. Lecture Notes in Mathematics, vol. 1965. Springer, London (2009)
Chidume, C.E., Chidume, C.O., Djitte, N., Minjibir, M.S.: Krasnoselskii-type algorithm for fixed points of multi-valued strictly pseudo-contractive mappings. Fixed Point Theory Appl. 2013, 58 (2013)
Fan, K.: A minimax inequality and applications. In: Shisha, O (ed.) Inequalities III, pp 103–113. Academic Press, San Diego (1972)
Fan, Q.-W., Wu, W., Zurada, J.M.: Convergence of batch gradient learning with smoothing regularization and adaptive momentum for neural networks. SpringerPLus 5, 295 (2016)
Iiduka, H.: Convergence analysis of iterative methods for nonsmooth convex optimization over fixed point sets of quasi-nonexpansive mappings. Math. Program. 159, 509–538 (2016)
Hung, P.G., Muu, L.D.: On inexact Tikhonov and proximal point regularization methods for pseudomonotone equilibrium problems. Vietnam J. Math. 40, 255–274 (2012)
García-Falset, J., Llorens-Fuster, E., Suzuki, T.: Fixed point theory for a class of generalized nonexpansive mappings. J. Math. Anal. Appl. 375, 185–195 (2011)
Kakutani, S.: A generalization of Brouwer’s fixed point theorem. Duke Math. J. 8, 457–459 (1941)
Khan, S.H., Yildirim, I., Rhoades, B.E.: RETRACTED: A One-step iterative process for two multivalued nonexpansive mappings in Banach spaces. Comput. Math. Appl. 61, 3172–3178 (2011)
Moudafi, A.: Viscosity approximation methods for fixed-point problems. J. Math. Anal. Appl. 241, 46–55 (2000)
Marino, G., Xu, H.-K.: Weak and strong convergence theorems for strict pseudo-contractions in Hilbert spaces. J. Math. Math. Appl. 329, 336–346 (2007)
Muu, L.D., Quoc, T.D.: Regularization algorithms for solving monotone Ky Fan inequalities with application to a Nash–Cournot equilibrium model. J. Optim. Theory Appl. 142, 185–204 (2009)
Nash, J.F.: Equilibrium points in n-person games. Proc. Natl. Acad. Sci. U. S. A. 36, 48–49 (1950)
Nash, J.F.: Non-cooperative games. Ann. Math. 2nd Ser. 54, 286–295 (1951)
Panyanak, B.: Mann and Ishikawa iteration processes for multivalued mappings in Banach spaces. Comput. Math. Appl. 54, 872–877 (2007)
Petrot, N., Wattanawitoon, K., Kumam, P.: A hybrid projection method for generalized mixed equilibrium problems and fixed point problems in Banach spaces. Nonlinear Anal. Hybrid Syst. 4, 631–643 (2010)
Qin, X., Cho, Y.J., Kang, S.M., Zhou, H.: Convergence of a modified Halpern-type iteration algorithm for quasi-ϕ-nonexpansive mappings. Appl. Math. Lett. 22, 1051–1055 (2009)
Sene, M., Faye, P., Djitté, N.: A Krasnoselskii-type algorithm for approximating a common fixed point of a finite family of multivalued strictly pseudo contractive mappings in Hilbert spaces. J. Math. Sci. Adv. Appl. 27, 59–80 (2014)
Song, Y., Cho, Y.-J.: Some notes on Ishikawa iteration for multi-valued mappings. Bull. Korean Math. Soc. 48, 575–584 (2011)
Sabach, S.: Iterative Methods for Solving Optimization Problems. Research Thesis, Technion-Israel Institute of Technology, Haifa (2012)
Takahashi, S., Takahashi, W.: Viscosity approximation methods for equilibrium problems and fixed point problems in Hilbert spaces. J. Math. Anal. Appl. 331, 506–515 (2007)
Xu, H.-K.: A variable Krasnosel’skii–Mann algorithm and the multiple-set split feasibility problem. Inverse Probl. 26, 2021–2034 (2006)
Xu, H.-K.: Iterative algorithms for nonlinear operators. J. Lond. Math. Soc. 66, 240–256 (2002)
Xu, H.-K.: Iterative methods for the split feasibility problem in infinite-dimensional Hilbert spaces. Inverse Probl. 26, 105018 (2010)
Yao, Y., Zhou, H., Liou, Y.-C.: Strong convergence of modified Krasnoselskii–Mann iterative algorithm for non-expansive mappings. J. Appl. math. Comput. 29, 383–389 (2009)
Acknowledgements
The author thanks the referees for their valuable comments and suggestions, which improved the presentation of this paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Sow, T.M.M. An Algorithm to Solve Equilibrium Problems and Fixed Points Problems Involving a Finite Family of Multivalued Strictly Pseudo-Contractive Mappings. Vietnam J. Math. 48, 171–186 (2020). https://doi.org/10.1007/s10013-019-00377-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10013-019-00377-z