
Abstract
The problem of attitude stabilization of a rigid body exposed to a nonstationary perturbing torque is investigated. The control torque consists of a restoring component and a dissipative one. Linear and nonlinear variants of restoring and perturbing torques are analyzed. Conditions of the asymptotic stability of the programmed orientation of the body are found with the use of the Lyapunov direct method and the averaging technique. The results of computer modeling, illustrating the conclusions obtained analytically, are presented.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The art of mathematical modeling of mechanical systems is based on the correct estimation of the acting forces and torques that affect the dynamics and provide qualitative and quantitative properties of motion. In those cases where the acting forces can be considered known and time invariant, the estimations are based on calculating the absolute values of forces and torques. In cases of time-varying forces and torques, such estimates are not enough. Important quantitative characteristics of variable force factors are their mean values. A comparison of the mean values of acting forces often reveals the main ones, and the rest can be classified as disturbances. However, numerous well-known examples of the analysis of the mechanical systems behavior indicate that disturbances with zero mean values are not necessarily insignificant. Therefore, neglecting such disturbances is unacceptable in many problems. At the same time, their account often significantly complicates analytical qualitative analysis of the mechanical system behavior [1,2,3,4,5,6]. Hence, on the one hand, there is a significant interest of specialists in problems of the dynamics of systems subjected to perturbations with zero mean values, and on the other hand, these complex problems are not well understood, and therefore the stream of publications on this topic continues [7,8,9,10,11,12]. Attitude stabilization of a spacecraft is one of the typical nonlinear problems, usually complicated by the presence of numerous nonstationary disturbances, including those with zero mean values. This problem is relevant in many astronautical and engineering applications [1, 12,13,14,15,16]. This article is dedicated to this specific problem. It is worth mentioning that a similar problem was earlier considered in our paper [17], but with other assumptions concerning disturbances and control torques.
2 Statement of the problem
Let a rigid body rotating around its mass center O with angular velocity \(\vec \omega \) be given. Denote by \(Ox_1x_2x_3\) the principal central axes of inertia of the body. The attitude motion of the body under a control torque \(\vec L\) is described by the Euler equations [1]
Here, \({\mathbf {J}}=\hbox \mathrm{diag} \{A_1,A_2,A_3\}\) is inertia tensor of the body in the axes \(Ox_1 x_2 x_3\).
Consider two right triples of mutually orthogonal unit vectors \(\vec \xi _1\), \(\vec \xi _2\), \(\vec \xi _3\) and \(\vec \eta _1\), \(\vec \eta _2\), \(\vec \eta _3\). Let vectors \(\vec \xi _1\), \(\vec \xi _2\), \(\vec \xi _3\) be constant in the inertial frame, and vectors \(\vec \eta _1\), \(\vec \eta _2\), \(\vec \eta _3\) be constant in the body-fixed frame. Thus, vectors \(\vec \xi _1\), \(\vec \xi _2\), \(\vec \xi _3\) rotate with respect to the system \(Ox_1 x_2 x_3\) with the angular velocity \(-\vec {\omega }\). Hence, we obtain the Poisson kinematic equations
It is worth noting that the systems (1), (2) may describe a wide variety of objects such as aircraft, satellite, submarine, missile, and quadcopter (Fig. 1) [1, 18,19,20].

Quadcopter attitude motion and angles \(\phi \), \(\theta \), \(\psi \)
Let torque \(\vec L\) be the sum of a dissipative component \(\vec L_d\) and a restoring one \(\vec L_r\): \(\vec L=\vec L_d+\vec L_r\). We will assume that the dissipative torque is linear with respect to \(\vec \omega \) [21, 22] and it is defined by the formula
where \(\mathbf {B}\) is a constant symmetric and negative definite matrix, h is a positive parameter. The restoring torque \(\vec L_r\) should be chosen such that the torque \(\vec L\) provides triaxial stabilization of the body, i.e., the system of Eqs. (1), (2) should admit the asymptotically stable equilibrium position
It is known (for example, see [19]), that the torque \(\vec L_r\) can be defined by the formula
Here, c, \(a_1\), \(a_2\) are positive constants,
\(\nu \ge 0\), and \(\Vert \cdot \Vert \) is the Euclidean norm of a vector.
In the present paper, we consider the case where, along with the control torque \(\vec L\), a nonstationary perturbing torque \(\vec {L}_p\) acts on the body.
3 Construction of a strict Lyapunov function for the unperturbed system
Consider the unperturbed system composed of the Poisson kinematic Eq. (2) and the Euler dynamic equations
where dissipative and restoring torques are defined by the formulae (3) and (5), respectively.
Stability of the equilibrium position (4) for the system (2), (6) was proved in [19]. However, it is worth mentioning that results of [19] are based on construction of a weak Lyapunov function. The derivative of this function along the solutions of the considered system is only nonnegative. Such Lyapunov functions are not well applicable to robustness analysis of nonlinear systems, since their negative semi-definite derivatives could become positive under arbitrarily small perturbations [23, 24].
In [20, 25], an approach was developed to transform the weak Lyapunov function constructed in [19] into a strict one (a function with negative definite derivative) [26, 27]. At the same time, it should be noted that the approach of [20, 25] can be used only for the case of linear restoring torque. Moreover, this approach is not effective for the investigation of the problem studied in the present paper. Therefore, we will propose another construction of a strict Lyapunov function for the system (2), (6).
Choose a Lyapunov function candidate as follows:
Here, \(\lambda \) is an auxiliary positive parameter. Then,
where \(c_1, c_2, c_3\) are positive constants.
Differentiating the function (7) along the solutions of (2), (6), we obtain
The matrix \(\mathbf {B}\) is negative definite. Therefore, the inequality
holds. Here, \(c_i>0\), \(i=4,\ldots ,8\).
Choose a number \(\varepsilon \in (0,1)\). In [28], it was proved that there exists \(\delta >0\) such that
for \(\Vert \vec \xi _1- \vec \eta _1\Vert ^2 +\Vert \vec \xi _2-\vec \eta _2\Vert ^2<\delta ^2\). Hence,
for \(\Vert \vec \xi _1- \vec \eta _1\Vert ^2 +\Vert \vec \xi _2-\vec \eta _2\Vert ^2<\delta ^2\), where \(c_9=\mathrm{const}>0\).
As a result, we obtain that there exist positive numbers \(\lambda \), h, \(\bar{\delta }\) such that
for \(\vec \omega \in \mathbb R^3\), \(\Vert \vec \xi _1- \vec \eta _1\Vert ^2 +\Vert \vec \xi _2-\vec \eta _2\Vert ^2<{\bar{\delta }}^2\).
It is worth noting that, in the case where \(\nu =0\), value of \(\lambda \) should be sufficiently small and the value of h should be sufficiently large, whereas, in the case where \(\nu >0\), h may be an arbitrary positive number and \(\lambda \) should be sufficiently large.
Thus, for an appropriate choice of \(\lambda \) and h, (7) is a strict Lyapunov function for the unperturbed system (2), (6).
In what follows, using the approach developed in [29,30,31] and taking into account structure and properties of the nonstationary torque \(\vec L_p\), we will propose some modifications of the function (7) to derive conditions ensuring asymptotic stability of the equilibrium position (4) of the perturbed system.
4 Linear restoring and perturbing torques
Let \(\nu =0\) and \(\vec L_p=\mathbf {D}_1(t)(\vec \xi _1- \vec \eta _1) +\mathbf {D}_2(t)(\vec \xi _2- \vec \eta _2)\). Here matrices \(\mathbf {D}_1(t), \mathbf {D}_2(t)\in \mathbb R^{3\times 3}\) are continuous and bounded for \(t\in [0,+\infty )\). Then, the system (1) takes the form
Thus, we consider the case where restoring and perturbing torques are linear.
Let us determine conditions under which perturbations do not disturb asymptotic stability of the equilibrium position (4).
Consider the derivative of the Lyapunov function (7) with respect to the system (2), (8). If \(\lambda \) and \(\bar{\delta }\) are sufficiently small and h is sufficiently large, then the inequalities
hold for \(\vec \omega \in \mathbb R^3\), \(\Vert \vec \xi _1- \vec \eta _1\Vert ^2 +\Vert \vec \xi _2-\vec \eta _2\Vert ^2<{\bar{\delta }}^2\).
Theorem 1
Let the matrices
be bounded for \(t\in [0,+\infty )\). Then, there exists a number \(h_0>0\) such that the equilibrium position (4) of the system (2), (8) is uniformly asymptotically stable for any \(h\ge h_0\).
Proof
Modify the Lyapunov function (7) as follows:
Using the results of the previous Section and the inequalities (9), it is easy to verify that one can choose and fix sufficiently small values of \(\lambda \) and \(\bar{\delta }\) and after that find \(h_0>0\) such that if \(h\ge h_0\), \(\Vert \vec \xi _1- \vec \eta _1\Vert ^2 +\Vert \vec \xi _2-\vec \eta _2\Vert ^2<{\bar{\delta }}^2\), then the function \(V_1\left( t,\vec \omega ,\vec \xi _1,\vec \xi _2\right) \) and its derivative with respect to the system (2), (8) satisfy the estimates
where \(b_1\), \(b_2\) are positive constants.
Hence, for sufficiently large values of \(h_0\), the inequalities
hold for \(h\ge h_0\), \(t\ge 0\), \(\vec \omega \in \mathbb R^3\), \(\Vert \vec \xi _1- \vec \eta _1\Vert ^2 +\Vert \vec \xi _2-\vec \eta _2\Vert ^2<{\bar{\delta }}^2\).
Thus, all the assumptions of the theorem on the uniform asymptotic stability (see [32]) are fulfilled for the function \(V_1\left( t,\vec \omega ,\vec \xi _1,\vec \xi _2\right) \). \(\square \)
Remark 1
For instance, the assumption of Theorem 1 on boundedness of the matrices (10) is fulfilled if entries of these matrices are periodic functions with zero mean values.
The next theorem gives us stability conditions for a wider class of perturbed systems.
Theorem 2
Let
uniformly with respect to \(t\in [0,+\infty )\). Then, there exists a number \(h_0>0\) such that the equilibrium position (4) of the system (2), (8) is uniformly asymptotically stable for any \(h\ge h_0\).
Proof
In this case, we will use the following modification of the Lyapunov function (7):
where \(\alpha \) is a positive parameter.
Under an appropriate choice of \(\lambda \), \(h_0\), \(\bar{\delta }\), we obtain
where \(b_3\), \(b_4\), \(b_5\) are positive constants.
In [33], it was proved that
uniformly with respect to \(t\in [0,+\infty )\). Therefore, there exists \(\alpha >0\) such that
for \(t\in [0,+\infty )\).
Then, for fixed values of \(\lambda \), \(\bar{\delta }\), \(\alpha \), one can find a sufficiently large number \(h_0\) such that
for \(h\ge h_0\), \(t\ge 0\), \(\vec \omega \in \mathbb R^3\), \(\Vert \vec \xi _1- \vec \eta _1\Vert ^2 +\Vert \vec \xi _2-\vec \eta _2\Vert ^2<{\bar{\delta }}^2\). \(\square \)
Remark 2
The conditions (11) are fulfilled if entries of the matrices \(\mathbf {D}_1(t)\), \(\mathbf {D}_2(t)\) are almost periodic functions with zero mean values. It is known (see [34]), that, for such matrices, the integrals (10) may be unbounded.
Remark 3
It is worth noting that Theorem 1 is a special case of Theorem 2. However, Theorem 1 possesses own meaning, since the proof of the theorem gives us less conservative restrictions on the parameter h than those in the proof of Theorem 2.
5 Purely nonlinear restoring and perturbing torques
Next, assume that \(\nu >0\) and the perturbing torque has the form \(\vec L_p=\mathbf {D}(t)\,\vec G(\vec \xi _1- \vec \eta _1,\vec \xi _2- \vec \eta _2)\), where the matrix \(\mathbf {D}(t)\in \mathbb R^{3\times m}\) is continuous and bounded for \(t\in [0,+\infty )\) and components of the vector \(\vec G(\vec u,\vec v)\in \mathbb R^{m}\) are continuously differentiable for \(\vec u,\vec v\in \mathbb R^3\) homogeneous functions of the order \(2\nu +1\). Hence, we consider the system
In this case, restoring and perturbing torques are purely nonlinear and homogeneous vector functions, and the homogeneity order of \(\vec L_r\) coincides with that of \(\vec L_p\).
Remark 4
It is known (see [35,36,37,38]), that, in numerous models of mechanical systems, strong nonlinear restoring forces with real-valued powers should be taken into consideration. Such forces can be related both to physical configurations and purely nonlinear material properties [3, 39]. In addition, power-law characteristics of restoring forces provide smooth approximations of non-smooth forces [38].
The aim of the present Section is to show that, for purely nonlinear restoring and disturbing torques, the asymptotic stability of the equilibrium position (4) can be guaranteed under less conservative conditions than for linear torques.
For an arbitrarily chosen \(h>0\), one can find \(\lambda _0>0\) and \(\bar{\delta }>0\) such that the derivative of the Lyapunov function (7) with respect to the system (2), (12) satisfies for \(\lambda \ge \lambda _0\), \(\vec \omega \in \mathbb R^3\), \(\Vert \vec \xi _1- \vec \eta _1\Vert ^2 +\Vert \vec \xi _2-\vec \eta _2\Vert ^2<{\bar{\delta }}^2\) the inequality
Theorem 3
Let the matrix \(\int _0^{t} \!\mathbf {D}(s) \, ds\) be bounded for \(t\in [0,+\infty )\). Then the equilibrium position (4) of the system (2), (12) is uniformly asymptotically stable for any \(h>0\).
Proof
Choose and fix an arbitrary positive value of the parameter h. Construct a Lyapunov function by the formula
If \(\lambda \) is sufficiently large and \(\bar{\delta }\) is sufficiently small, then the function \(V_1\left( t,\vec \omega ,\vec \xi _1,\vec \xi _2\right) \) and its derivative with respect to the system (2), (8) satisfy the estimates
for \(t\ge 0\), \(\vec \omega \in \mathbb R^3\), \(\Vert \vec \xi _1- \vec \eta _1\Vert ^2 +\Vert \vec \xi _2-\vec \eta _2\Vert ^2<{\bar{\delta }}^2\). Here \(b_1\) and \(b_2\) are positive constants.
Using properties of homogeneous functions (see [40, 41]), it can be proved the existence of a number \(\delta _0>0\) such that the estimates
hold for \(t\ge 0\), \(\vec \omega \in \mathbb R^3\), \(\Vert \vec \xi _1- \vec \eta _1\Vert ^2 +\Vert \vec \xi _2-\vec \eta _2\Vert ^2<{\delta _0}^2\). \(\square \)
Theorem 4
Let
uniformly with respect to \(t\in [0,+\infty )\). Then, the equilibrium position (4) of the system (2), (12) is uniformly asymptotically stable for any \(h>0\).
Proof
Let h be a fixed positive number. Consider the Lyapunov function
where \(\alpha =\mathrm{const}>0\).
If \(\lambda \) is sufficiently large and \(\bar{\delta }\) is sufficiently small, then
Here, \(b_3\), \(b_4\), \(b_5\) are positive constants.
Similarly to the proof of Theorem 2, choose \(\alpha >0\) such that
for \(t\in [0,+\infty )\). Then, for sufficiently small values of \(\bar{\delta }\), we obtain
for \(t\ge 0\), \(\vec \omega \in \mathbb R^3\), \(\Vert \vec \xi _1- \vec \eta _1\Vert ^2 +\Vert \vec \xi _2-\vec \eta _2\Vert ^2<{\bar{\delta }}^2\). \(\square \)
Remark 5
Theorem 3 is a special case of Theorem 4. However, the proof of Theorem 3 permits us to derive a wider estimate of attraction domain of the equilibrium position than that which can be obtained with the aid of the proof of Theorem 4.
Remark 6
Compared with Theorems 1 and 2, Theorems 3 and 4 guarantee the asymptotic stability of the equilibrium position (4) for any \(h>0\).
6 Computer modeling and discussion
The aim of the present paper is to provide a constructive approach to robustness analysis in the problem of attitude control for a rigid body subjected to nonstationary disturbing torques with zero mean values. It is worth noting that the disturbing torques (linear and nonlinear) are not assumed to be small in magnitude. For this reason, the obtained results seem to be attractive from the practical point of view.
The suggested approach is based on construction of a strict Lyapunov functions for the system governing the rigid body attitude dynamics. Theorems 1–4 ensure conditions under which perturbations do not disturb asymptotic stability of the programmed attitude motion.
In this Section, we illustrate Theorems 1–4 by means of a numerical simulation with the use of Maple-2019 tools for the numerical integration of differential equations.
Let the inertial parameters of a rigid body be given as: \(A_1=20\), \(A_2=24\), \(A_3=16\). Here and in what follows all parameters are taken in International System of Units. The programmed orientation (4) of the body is such that “aircraft” angles \(\varphi \), \(\theta \), \(\psi \) in the inertial coordinate system are all equal to zero. The disturbing torque is taken in the form \(\vec L_p=\mathbf {D}(t)\,\vec G(\vec \xi _1- \vec \eta _1,\vec \xi _2- \vec \eta _2)\), where
Choose the matrix \(\mathbf {B}\) of dissipative torque in the form \(\mathbf {B}=-\mathrm {diag}\{1, 1, 1\}\). Let \(a_1=1\), \(a_2=1\), \(c=1\). Consider the control process governed by the system (2), (12) for different values of h and \(\nu \) and the same initial conditions \(\varphi (0)=0.4\), \(\theta (0)=0.4\), \(\psi (0)=-0.4\), \(\omega _1(0)=\omega _2(0)=\omega _3(0)=0.2\).
First, we take \(h=0.1\) and \(\nu =0\). In this case disturbing and control torques are linear, the dissipative torque is small, and the process doesn’t converge to the programmed motion as can be seen from Fig. 2.

Angles time history, \(h=0.1\), \(\nu =0\)
In accordance with Theorems 1 and 2, there exists a number \(h_0>0\) such that the programmed motion is uniformly asymptotically stable for any \(h\ge h_0\). In our case \(h_0 =0.4\) is appropriate as it can be seen from Fig. 3. where the stabilization process is shown.

Angles time history, \(h=0.4\), \(\nu =0\)

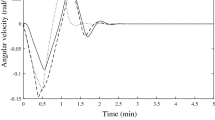
Angles time history, \(h=0.1\), \(\nu =0.5\)
At the same time, Theorems 3 and 4 give us the possibility to reach the goal of a stabilization process without dissipative torque increasing. This possibility is based on applying the nonlinear restoring torque (\(\nu >0\)). As is shown in Fig. 4. asymptotic stability is achieved at \(\nu =0.5\) even for \(h=0.1\).
We believe that our approach to the Lyapunov stability analysis in the problem of attitude control for a rigid body subjected to nonstationary disturbing torques with zero mean values is rather effective, and it can be exploited for the problem of satellite attitude stabilization with the use of electrodynamic attitude control system [28, 42, 43]. As is known, a satellite that moves in the Earth’s gravitational and magnetic fields [44, 45] is subjected to a lot of disturbing torques [18, 46,47,48]. From the mathematical point of view, the majority of these torques can be modeled by almost periodic functions of time with zero mean values [49]. The magnitudes of these torques are often close to each other, and, generally speaking, they are not negligibly small [1]. For this reason, the usage of well-known perturbation methods faces difficulties in such problems, and the methods based on the application of Lyapunov functions seem to be promising.
Abbreviations
- \(A_1, A_2, A_3\) :
-
Satellite principal central moments of inertia with respect to body frame axes \(x_1, x_2, x_3\), kg \(\cdot \) m\(^2\)
- \(a_1, a_2\) :
-
Positive constants
- \(\mathbf{B}\) :
-
Constant symmetric and negative definite matrix
- \(b_1, b_2\) :
-
Positive constants
- c :
-
Positive constant
- \(c_1,\ldots , c_9\) :
-
Positive constants
- \(\mathbf{D}_1(t)\) :
-
Continuous and bounded matrix for \(t\in [0,+\infty )\)
- \(\mathbf{D}_2(t)\) :
-
Continuous and bounded matrix for \(t\in [0,+\infty )\)
- \(\mathbf{J}\) :
-
Satellite inertia tensor in body frame \(x_1, x_2, x_3\), kg \(\cdot \) m\(^2\)
- h :
-
Positive parameter
- \( h_0\) :
-
Positive number
- \(\vec L\) :
-
Control torque vector in body frame, N\(\cdot \)m
- \(\vec L_d\) :
-
Dissipative component of control torque, N\(\cdot \)m
- \(\vec L_p\) :
-
Perturbing torque vector in body frame, N\(\cdot \)m
- \(\vec L_r\) :
-
Restoring component of control torque, N\(\cdot \)m
- t :
-
Time, s
- V :
-
Lyapunov function
- \(V_1,\ldots , V_4\) :
-
Lyapunov functions
- \(\alpha \) :
-
Positive constant
- \(\delta \) :
-
Positive parameter
- \(\bar{\delta }\) :
-
Positive parameter
- \(\varepsilon \) :
-
Positive parameter such that \(\varepsilon \in (0,1)\)
- \({\vec {\eta }}_1, {\vec {\eta }}_2, {\vec {\eta }}_3\) :
-
Unit vectors of body-fixed frame
- \(\theta \) :
-
“Aircraft” angle
- \(\lambda \) :
-
Auxiliary positive parameter
- \(\lambda _0\) :
-
Positive number
- \({\vec {\xi }}_1, {\vec {\xi }}_2, {\vec {\xi }}_3 \) :
-
Unit vectors of inertial frame
- \(\varphi \) :
-
“Aircraft” angle
- \(\psi \) :
-
“Aircraft” angle
- \(\vec \omega \) :
-
Angular velocity of satellite in inertial reference frame, rad/s
References
Beletsky, V.V., Yanshin, A.M.: The Influence of Aerodynamic Forces on Spacecraft Rotation. Naukova Dumka, Kiev (1984).. (in Russian)
Krasil’nikov, P.S.: Applied Methods for the Study of Nonlinear Oscillations. Izhevsk Institute of Computer Science, Izhevsk (2015).. (in Russian)
Belyaev, A.K., Irschik, H.: On the dynamic instability of components in complex structures. Int. J. Solids Struct. 34(17), 2199–2217 (1997). https://doi.org/10.1016/S0020-7683(96)00139-4
Xu, Y., Guo, R., Jia, W.: Stochastic averaging for a class of single degree of freedom systems with combined Gaussian noises. Acta Mech. 225, 2611–2620 (2014). https://doi.org/10.1007/s00707-013-1040-x
Mashtakov, Y.V., Ovchinnikov, M.Y., Tkachev, S.S.: Study of the disturbances effect on small satellite route tracking accuracy. Acta Astronaut. 129, 22–31 (2016). https://doi.org/10.1016/j.actaastro.2016.08.028
Ivanov, D., Koptev, M., Mashtakov, Y., Ovchinnikov, M., Proshunin, N., Tkachev, S., Fedoseev, A., Shachkov, M.: Determination of disturbances acting on small satellite mock-up on air bearing table. Acta Astronaut. 142, 265–276 (2018). https://doi.org/10.1016/j.actaastro.2017.11.010
Torres, P.J., Madhusudhanan, P., Esposito, L.W.: Mathematical analysis of a model for Moon-triggered clumping in Saturn’s rings. Phys. D Nonlinear Phenom. 259(15), 55–62 (2013)
Chen, L., Lou, Q., Zhuang, Q.: A bounded optimal control for maximizing the reliability of randomly excited nonlinear oscillators with fractional derivative damping. Acta Mech. 223, 2703–2721 (2012). https://doi.org/10.1007/s00707-012-0722-0
Emel’yanov, N.V.: Perturbed motion at small eccentricities. Sol. Syst. Res. 49, 346–359 (2015)
Krasil’nikov, P.: Fast non-resonance rotations of spacecraft in restricted three body problem with magnetic torques. Int. J. Non-Linear Mech. 73(4), 43–50 (2015). https://doi.org/10.1016/j.ijnonlinmec.2014.11.003
Feng, C., Zhu, W.: Asymptotic Lyapunov stability with probability one of Duffing oscillator subject to time-delayed feedback control and bounded noise excitation. Acta Mech. 208, 55–62 (2009). https://doi.org/10.1007/s00707-008-0126-3
Ivanov, D.S., Ovchinnikov, M.Y., Penkov, V.I., Roldugin, D.S., Doronin, D.M., Ovchinnikov, A.V.: Advanced numerical study of the three-axis magnetic attitude control and determination with uncertainties. Acta Astronaut. 132, 103–110 (2017). https://doi.org/10.1016/j.actaastro.2016.11.045
Joshi, R.P., Qiu, H., Tripathi, R.K.: Configuration studies for active electrostatic space radiation shielding. Acta Astronaut. 88, 138–145 (2013). https://doi.org/10.1016/j.actaastro.2013.03.011
Elmandouh, A.A.: On the stability of the permanent rotations of a charged rigid body-gyrostat. Acta Mech. 228, 3947–3959 (2017). https://doi.org/10.1007/s00707-017-1927-z
Kumar, K.D.: Satellite attitude stabilization using fluid rings. Acta Mech. 208, 117–131 (2009). https://doi.org/10.1007/s00707-008-0132-5
Tikhonov, A.A.: Natural magneto-velocity coordinate system for satellite attitude stabilization: the concept and kinematic analysis. J. Appl. Comput. Mech. 7(4), 2113–2119 (2021)
Aleksandrov, A.Y., Tikhonov, A.A.: Nonlinear control for attitude stabilization of a rigid body forced by nonstationary disturbances with zero mean values. J. Appl. Comput. Mech. 7(2), 790–797 (2021). https://doi.org/10.22055/JACM.2020.35394.2658
Beletsky, V.V.: Motion of an Artificial Satellite About its Center of Mass. Israel Program for Scientific Translation, Jerusalem (1966)
Zubov, V.I.: Lectures on Control Theory. Nauka, Moscow (1975). (Russian)
Smirnov, E.Y.: Some Problems of Mathematical Control Theory. Leningrad State University, Leningrad (1981). (Russian)
Ershov, D.Y., Lukyanenko, I.N., Smirnov, A.O., Aman, E.E.: Defining free damped oscillation in technological systems. IOP Conf. Ser. Mater. Sci. Eng. (2019). https://doi.org/10.1088/1757-899X/537/3/032035
Dosaev, M.: Interaction between internal and external friction in rotation of vane with viscous filling. Appl. Math. Model. 68, 21–28 (2019). https://doi.org/10.1016/j.apm.2018.11.002
Martynyuk, A.A., Lakshmikantham, V., Leela, S.: Stability Analysis of Nonlinear Systems. Marcel Dekker, New York (1989)
Malisoff, M., Mazenc, F.: Constructions of Strict Lyapunov Functions. Springer, London (2009)
Smirnov, E.Y.: Control of rotational motion of a free solid by means of pendulums. Mech. Solids 15, 1–5 (1980)
Grigoriev, V.V., Bystrov, S.V., Mansurova, O.K., Pershin, I.M., Bushuev, A.B., Petrov, V.A.: Exponential stability regions estimation of nonlinear dynamical systems. Mekhatronika Avtom. Upr. 21(3), 131–135 (2020). https://doi.org/10.17587/mau.21.131-135
Melnikov, G.I., Melnikov, V.G., Dudarenko, N.A., Talapov, V.V.: The method of exponential differential inequality in the estimation of solutions of nonlinear systems in the vicinity of the zero of the state space. Lect. Notes Mech. Eng. (2021). https://doi.org/10.1007/978-3-030-62062-2_20
Aleksandrov, A.Y., Aleksandrova, E.B., Tikhonov, A.A.: Stabilization of a programmed rotation mode for a satellite with electrodynamic attitude control system. Adv. Space Res. 62(1), 142–151 (2018). https://doi.org/10.1016/j.asr.2018.04.006
Aleksandrov, A.Y.: On the stability of equilibrium of unsteady systems. J. Appl. Math. Mech. 60(2), 205–209 (1996). (in Russian)
Aleksandrov, A.Y.: On the asymptotical stability of solutions of nonstationary differential equation systems with homogeneous right hand sides. Dokl. Akad. Nauk. Ross. 349(3), 295–296 (1996). (in Russian)
Aleksandrov, A.Y., Aleksandrova, E.B., Zhabko, A.P.: Stability analysis for a class of nonlinear nonstationary systems via averaging. Nonlinear Dyn. Syst. Theory 13(4), 332–343 (2013)
Khalil, H.K.: Nonlinear Systems. Prentice-Hall, Upper Saddle River NJ (2002)
Bogoliubov, N.N., Mitropolsky, Y.A.: Asymptotic Methods in the Theory of Non-Linear Oscillations. Gordon and Breach, New York (1961)
Demidovich, B.P.: Lectures on Stability Theory. Nauka, Moscow (1967). (Russian)
Holl, H.J., Belyaev, A.K., Irschik, H.: Simulation of the Duffing-oscillator with time-varying mass by a bem in time. Comput. Struct. 73(1–5), 177–186 (1999). https://doi.org/10.1016/S0045-7949(98)00281-8
Gendelman, O.V., Lamarque, C.H.: Dynamics of linear oscillator coupled to strongly nonlinear attachment with multiple states of equilibrium. Chaos Solitons Fractals 24, 501–509 (2005)
Kovacic, I.: Forced vibrations of oscillators with a purely nonlinear power-form restoring force. J. Sound Vib. 330, 4313–4327 (2011)
Kovacic, I., Zukovic, M.: Coupled purely nonlinear oscillators: normal modes and exact solutions for free and forced responses. Nonlinear Dyn. 87, 713–726 (2017). https://doi.org/10.1007/s11071-016-3070-0
Porubov, A.V., Belyaev, A.K., Polyanskiy, V.A.: Nonlinear hybrid continuum-discrete dynamic model of influence of hydrogen concentration on strength of materials. Contin. Mech. Thermodyn. 33(4), 933–941 (2021). https://doi.org/10.1007/s00161-020-00936-7
Zubov, V.I.: Methods of A.M. Lyapunov and their Applications. P. Noordhoff Ltd., Groningen (1964)
Polyakov, A.: Generalized Homogeneity in Systems and Control. Springer, Cham (2020)
Aleksandrov, A.Y., Antipov, K.A., Platonov, A.V., Tikhonov, A.A.: Electrodynamic stabilization of artificial earth satellites in the Konig coordinate system. J. Comput. Syst. Sci. Int. 55(2), 296–309 (2016). https://doi.org/10.1134/S1064230716010020
Aleksandrov, A.Y., Tikhonov, A.A.: Asymptotic stability of a satellite with electrodynamic attitude control in the orbital frame. Acta Astronaut. 139, 122–129 (2017). https://doi.org/10.1016/j.actaastro.2017.06.033
Tikhonov, A.A., Petrov, K.G.: Multipole models of the earth’s magnetic field. Cosm. Res. 40(3), 203–212 (2002). https://doi.org/10.1023/A:1015916718570
Ovchinnikov, M.Y., Penkov, V.I., Roldugin, D.S., Pichuzhkina, A.V.: Geomagnetic field models for satellite angular motion studies. Acta Astronaut. 144, 171–180 (2018). https://doi.org/10.1016/j.actaastro.2017.12.026
Petrov, K.G., Tikhonov, A.A.: The moment of Lorentz forces, acting upon the charged satellite in the geomagnetic field. Part 1. The strength of the Earth’s magnetic field in the orbital coordinate system. Vest. St.Petersb. State Univ. Ser. 1(1), 92–100 (1999)
Petrov, K.G., Tikhonov, A.A.: The moment of Lorentz forces, acting upon the charged satellite in the geomagnetic field. Part 2.. The determination of the moment and estimations of its components. Vest. St.Petersb. State Univ. Ser. 1(3), 81–91 (1999)
Mashtakov, Y., Ovchinnikov, M., Wöske, F., Rievers, B., List, M.: Attitude determination & control system design for gravity recovery missions like grace. Acta Astronaut. 173, 172–182 (2020). https://doi.org/10.1016/j.actaastro.2020.04.019
Tikhonov, A.A.: Resonance phenomena in oscillations of a gravity-oriented rigid body. Part 4: multifrequency resonances. St.Petersb. Univ. Mech. Bull. 1, 131–137 (2000)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Aleksandrov, A.Y., Tikhonov, A.A. Attitude stabilization of a rigid body under disturbances with zero mean values. Acta Mech 233, 1231–1242 (2022). https://doi.org/10.1007/s00707-022-03163-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-022-03163-0