
Abstract
Purpose
In the field of spinal surgery, 3D-fluoroscopy navigation-assisted pedicle screw (PS) insertion with intra-operative 3D-image control represents a modern application of contemporary navigation technology. In literature, sectional or vertebral accuracy limitations of this image-guidance approach are not profoundly specified. This observational study explicitly differentiates accuracy rates and misplacement mode between spinal sections and single vertebrae from T10 to S1 using a navigation-assisted approach.
Methods
From February 2011 through July 2015, all 3D-fluoroscopy navigation-assisted, 3D-image controlled PS insertions from T10 to S1 were prospectively recorded and evaluated for PS insertion depth, angulation, and entering-point modifications after intraoperative O-arm control scanning. Major complications requiring revision surgery for neurological damage/major bleedings, and procedure-related unintended violations of anatomical structures were recorded.
Results
In 1547 navigation-assisted PS insertions, thoracolumbar accuracy (96.4%) was significantly higher than sacral accuracy (92.6%, p ≈ 0.007) due to special requirements to exact PS (insertion depth) in S1 (p < 0.001). Vertebrae with modification rates above average were identified (T10, L5-S1) (p < 0.001). Major complications did not occur, anatomical structures were violated in 1.2% (19/1547 PS insertions).
Conclusions
In navigation-assisted O-arm-controlled PS placements, correct PS insertion depths are less easily to achieve than correct trajectory or entering-points, which is important for bicortical PS anchorage in S1. Therefore, post-instrumentation PS control by 3D-imaging or at least intraoperative fluoroscopy is recommended for levels with special requirements to exact PS insertion depths (e.g. S1).
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Pedicle screw (PS) instrumentations of the thoracolumbar spine and sacrum are generally performed using a single C-arm. With this technique, undetected screw misplacements can occur in considerable frequency. In a meta-analysis, misplacement rates of 21% are reported for the lumbar spine [1]. However, misplaced screws do not always have consequences for the patient. Depending on the definition of “misplacement”, “suboptimal” and “harmful” positions have to be distinguished. Only harmful screw positions need to be corrected. Revision surgery rates due to PS fail positions account for about 5% [2]. Progressive technology, like computer-assisted navigation, helps to improve insertion accuracy [3, 4]. In first-generation navigation systems, pre-surgical computed tomography (CT) scans served as reference after intraoperative surface matching, but time-consuming matching procedures and technical requirements reduced their attractiveness. After years of technological innovations, the accuracy of 3D-navigation with available C-arms still was limited by artefact-related blurred imaging, which impeded clear identification of secure pedicular corridors in contrast to closely neighbouring neurological structures of the spinal canal. Furthermore, adequate positional PS control necessitated a post-surgical CT scan [5,6,7], since the principle of summation imaging in plain radiography or C-arm fluoroscopy only provided inaccurate information. Modern 3D-fluoroscopy scanners, e.g. the O-arm, generate images of almost CT scan quality in the operating theatre. Adequate imaging quality helps to detect hazardous screw misplacements and is an important prerequisite to replace post-surgical CT scans and decrease the number of implant-related revision surgeries [8, 9]. But although advancing technological progress helped to make surgical procedures safer, PS misplacements are still an issue [9, 10]. Especially anatomically demanding spinal sections seem to have an impact on accuracy in image-guided procedures. Varying misplacement rates in thoracic and lumbar vertebrae [1, 3, 9, 11, 12] may be due to characteristic anatomical features affecting insertion accuracy or misplacement mode in navigated procedures. A thoracic vertebra’s pedicle usually is narrow, curved, and sagittally angulated in cephalad-caudad direction before it merges with the rear of the vertebral body [13]. A lumbar vertebra’s pedicle is hardly curved, broader, and sagittally less angulated. Sacral pedicles usually have bigger diameters, and are convergently angulated in the axial plane.
This study evaluates the accuracy and safety of 3D-navigation-assisted O-arm-controlled PS applications from the lower thoracic spine to the lumbosacral transition with regard to rate and mode of screw misplacements to detect section- or vertebra-specific differences.
Materials and methods
From February 2011 to July 2015, all thoracic and lumbosacral levels with at least 20 PS applications using the combination of navigation unit plus O-arm (StealthStation S7 Surgical Navigation System, O-arm®, Surgical Imaging System, Medtronic Sofamor Danek, Memphis, TN, USA) for image-guided screw insertion and post-instrumentation control were included in this clinical cohort study according to a prospective non-blinded study design. Surgeries were performed by the two authors in almost equal contribution. Only the second author had prior experience with navigated procedures (Iso-C-3D fluoroscopy). All subjects gave their written informed consent after having obtained information about the use of an O-arm and navigation unit for inserting PSs.
Surgical technique
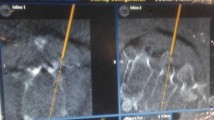
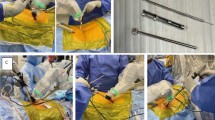
Patients were in prone position under general anaesthesia. After soft tissue dissection, the navigation reference clamp was fixed to a spinous process in the caudad end of the surgical field. For navigation data acquisition, ventilation was interrupted during O-arm scanning to prevent poor image quality due to minor trunk movements and to obtain a high level of accuracy. In our approach, real-time tool tracking in the sagittal, transaxial, and coronal plane plus fluoroscopic anteroposterior view was used for preparing PS beds with the navigated awl and probe. The navigated probe helped to determine screw diameters and lengths by calibrated virtual display on the StealthStation monitor. In cases of osteosclerosis, additional non-navigated thread cutting was performed. For PS application a non-navigated screwdriver was used (navigation-assisted technique). PS instrumentations were performed without the assistance of K-wires. After spinal instrumentation, a second scan was performed for finally controlling PS positions. When the surgeon detected relevant implant malpositions in two- or three-dimensional visualization, screw modifications were performed, instantly. Only after PS replacement or modification of a screw’s starting point or angulation (=trajectory), another scan was carried out as final control.
Criteria for intraoperative PS modifications
General criteria for performing PS corrections were an insufficient vertebral anchorage with the risk of subsequent instability of the whole instrumentation (<75% of maximum trajectory length, missed bicortical sacral anchorage, extrapedicular/extravertebral screw position (axis of screw body outside the pedicle/vertebra)), or the harmful violation of anatomical structures, i.e. unintended (cephalad) facet joint lesions, perforations into the spinal or a nerve root canal, or the non-respect of a vertebra’s anterior cortical limit with potentially hazardous effects for big retroperitoneal vessels. Concrete criteria for the decision making process on whether to perform PS modifications are given in Table 1. Screw corrections were recorded post-surgically concerning modifications of a screw‘s vertebral entering point, its angulation, insertion depth into the vertebra, or combinations of these.
For this observational study, the STROBE statement was followed.
Statistical analysis
Values were expressed as mean and standard deviation of the mean. Student’s t test was used for comparing continuous variables, and Chi-square test for categorical variables (significant at a p < 0.05 level). SPSS 15.0.1 for Windows was used for analyses.
Results
A total of 306 patients with a gender ratio of 188:118 (female:male), and an average age of 61.1 ± 12.5 years were treated using O-arm based 3D-image-guidance for inserting 1547 PSs (Fig. 1). Baseline characteristics and underlying diagnoses are given in Table 2. Screws were inserted either primarily to stabilize spinal pathologies [1059/1547 screws (68.5%)] or secondarily to address postoperative sequelae of previous surgeries, e.g. adjacent segment pathologies, spinal canal re-stenosis requiring stabilization, etc. [488/1547 screws (31.5%)]. Intraoperative data acquisition for navigation was successfully performed in all cases. After having controlled PS positions with a 3D-scan, 30 additional post-modification scans were conducted in 306 surgeries, indicating a control-scan rate of 1.1 per surgery. All modifications were done during the same procedure. Revision surgeries for PS corrections were not indicated.

Distribution of 1547 navigated pedicle screws (T10-S1). Percentages display modification rates per vertebral level, absolute figures show number of screws modified per screws inserted in single vertebrae. Modification rates of T11-L4 are significantly lower than those of T10 and L5-S1 (p < 0.001). T indicates thoracic vertebra, L lumbar vertebra, S sacral vertebra
Efficacy outcomes
Sixty-six navigated PSs were modified after identifying harmful positions or insufficient vertebral anchorage in control scans, representing an accuracy of 95.7%. Number, rate, and misplacement mode of modified screws are given in Table 3 including a subdivision into spinal sections and sectional accuracy rates. Chi-square test showed dependency of modification rates on spinal sections (p ≈ 0.02) with statistically significant differences between lumbar and sacral accuracies (p ≈ 0.01). Comparison of misplacement mode and spinal section revealed significant dependencies only for insertion depth errors (p < 0.001, Table 4).
Modification rates below average (p ≈ 0.02) were seen in the thoracolumbar transition (T11: 3.1%, T12: 0.0%, L1: 2.9%, L2: 2.6%), and mid-lumbar spine (L3: 2.9%, L4: 2.2%). Modification rates above average (p ≈ 0.04) were identified in T10 (4.5%), and the lumbosacral transition (L5: 5.8%, L6: 4.5%, S1: 7.4%, Fig. 1). Misplacement rates were significantly different between these groups (p < 0.001) due to insertion depth errors, that occurred significantly more often in vertebrae with misplacement rates above average (p < 0.001, Table 5).
Safety outcomes
Implant-related neurological damage or major bleedings were not seen. Violations of anatomical structures occurred in 1.2% of PS insertions, reflecting 29% of modifications [14/38 insertion depth modifications with 10 conversions to shorter screws and 4 insertion depth reductions, 2/23 angulation corrections for penetrations into the cephalad adjacent disc or a nerve root canal, and 3/5 starting point alterations for penetration into the spinal (n = 2), or a nerve root canal (n = 1)], without clinical impact according to postsurgical neurological deterioration, relevant blood loss or revision surgery. Seventy-one percent of modifications were performed to enhance a screw’s pull-out strength (24/38 insertion depth modifications, 21/23 angulation corrections, 2/5 entering point alterations). Procedure-specific complications, like intraoperative collisions of patient and O-arm, or neurological deficits related to the duration of breath-arrest while scanning the surgical field, were not observed.
Discussion
The classification most commonly used for describing PS accuracy is the 2-mm increment deviation classification [4, 14]. It describes pedicular screw misplacements, but is not appropriate to classify other misplacement modes like angular or insertion depth errors, and it does not inform about the quality of PS anchorage in the vertebral body. Authors, who used this classification system concentrated on the description of a screw’s location relative to the pedicle or on the degree of “tip-out” misplacement related to the anterolateral vertebral margin. Under these conditions, image-guided techniques have proven to offer lower PS malposition rates compared to non-navigated approaches [1, 3, 8, 12, 15,16,17,18,19]. Furthermore, with the evolution of 3D-navigation excessive PS deviation from the safe pedicular corridor has become a rare event [20]. Although it is not yet validated, the classification in our study (Table 1) goes beyond a mere rating scheme for pedicular malpositions, as navigated screw insertions need a more complex contemplation. We could show that insertion depth errors (n = 38) were a major part of misplacements that have occurred even more frequently than pedicle breaches (n = 17) in our approach of navigation-assisted pedicle screw insertions from T10 to S1. Compared to a meta-analysis on the accuracy of different image-guidance systems for lumbar PS insertions comprising 7533 navigated screws [14], our accuracy of 95.7% still excelled CT-based image-guidance, and matched the results of other 3D-fluoroscopy-based navigation techniques. Silbermann et al. found an accuracy of 99% with an O-arm based navigation technique for lumbar and sacral vertebrae in 37 patients, but considered pedicular perforations of up to 3 mm still being inside the “safe zone” [8]. This shows how difficult accuracy comparisons are, as generally accepted thresholds or definitions for accuracy calculations do not exist, yet.
Evaluating misplacement rates in every single vertebra from T10 to S1 helped to define vertebrae with low (T11-L4), and high misplacement rates (T10, L5, L6, S1). Between those two groups, significant differences concerning the rate of insertion depth errors (p < 0.001) were found (Table 5) similar to those between S1 and thoracic/lumbar sections (Table 4). This results in statistical dependency not only between modification rate and vertebrae/spinal sections, but also between modification mode (insertion depth error) and spinal sections/a group of vertebrae in our approach of navigation-assisted PS insertions. Vertebra-specific misplacement rates similar to ours were reported in a series of 2422 navigated PSs from T10 to L4, with lower rates being reported for L5-S1 due to a pedicle-breach-specific definition of “misplacement” [19]. Rivkin and Yocom reported on higher misplacement rates in L5 during 3D image-guided PS insertions and identified insertion depth errors to make up 80% of their L5-misplacements which we did not experience in this extent [21].
A multicenter study on O-arm based StealthStation navigation reports a misplacement rate of 2.5% after insertion of 1922 thoracic, lumbar, and sacral PSs in 353 patients [18]. Only 1.8% of screws were revised during the same procedure. The authors used a navigated screwdriver after navigated tapping and probing with an insertion depth misplacement rate of only 0.26%. None of these needed correction. With our technique of using a non-navigated screwdriver, however, a major part of corrections was due to insertion depth errors (57.6%) showing highest frequencies in S1 (Table 4). As only in sacral levels bicortical screw placement was a pre-defined criterion for acceptable PS positions (Table 1), insufficient insertion depth required correction until bicortical screw fixation was attained. Therefore, insertion depth modifications were always obligatory corrections in S1 (n = 15), whereas in lumbar levels, 19 of 23 insertion depth modifications were optional, performed to “perfect” the surgical result after O-arm scanning which certainly motivates for expendable amendments [12]. A navigated screwdriver or intraoperative fluoroscopy, therefore, are dispensable in lumbar levels, but should be recommended for S1-PS insertions. Kleck et al. did not find significant differences in accuracy with or without a navigated screwdriver in 158 thoracolumbar PS insertions, but they did not investigate sacral screw applications [22].
As thoracic vertebrae generally have small pedicle diameters with a “curved design” [13], pedicular malpositions were estimated to occur more frequently in thoracic than in, e.g. sacral vertebrae. In our approach, the probability of missing thoracic pedicles due to angulation or entering point errors was not significantly higher than missing the broader sacral pedicles (1/91 versus 3/258, p ≈ 0.96, and 1/91 versus 1/258, p ≈ 0.43), indicating safe navigation-assisted screw insertions despite narrow pedicles due to high angulation and entering point accuracy. The weak point of navigation-assisted PS placement is an insufficient control over correct insertion depth (=longitudinal PS positioning) which is required in S1 to guarantee bicortical fixation.
Further analysis did not show correlations between screw misplacement rates and preoperative diagnosis.
Similar to our revision surgery rate for misplaced screws of 0%, reliable image-guided screw insertions were reported by Zausinger et al. after iCT (intraoperative Computed Tomography) image-guided surgery in a volume of 414 navigated screws [23], by Amiot at al. who inserted 294 PSs with computer assistance [15], by Shin et al. using O-arm based navigation to place 106 PSs [17], by Larson et al. inserting 984 O-arm navigated PSs from T1-S1 in pediatric patients [12], by Tormenti et al. after CT-based image-guidance of 164 thoracolumbar PSs [11], and by Mathew et al. after insertion of 104 PSs using O-arm based navigation [24].
We did not experience neurological or vascular complications. In literature, neurovascular damage is reported to be a rare event in navigated procedures. Shin et al. reported on one screw-related neurological deficit in 106 O-arm navigated thoracic, and lumbosacral PSs [17]. In a retrospective study including 1084 3D-image-guided thoracolumbar PS insertions, no vascular complications, and two nerve root injuries occurred in 220 consecutive patients [25].
A limitation of our study is that observations are restricted to posterior instrumentations from T10 to S1. These vertebrae were the ones most frequently instrumented in our institution during the recruiting period. To avoid false conclusions due to small sample sizes we excluded levels with less than 20 navigated and O-arm controlled PS insertions from considerations. This was the case for all cervical and thoracic vertebrae above T10. Another limitation is the fact, that assessment of images for identifying misplaced screws was performed by the surgeons themselves.
Conclusions
This is the first clinical study with a large volume of image-guided PS insertions in T10 to S1 that delineates limitations of a navigation-assisted approach for PS placement. It highlights that an exact longitudinal positioning of pedicle screws—as required, e.g. in bicortical applications in sacral levels—is dependent on intraoperative radiological control by fluoroscopy or 3D-scanning after navigation-assisted PS application, whereas trajectory and entering point navigation are reliably performed with this approach. In thoracic or lumbar vertebrae, exact insertion depth is less crucial than finding the correct trajectory and entering point, which makes navigation-assisted PS application a safe procedure in this field. For sacral applications, however, this approach seems less suitable. Whether a navigated screwdriver may help to reliably find correct insertion depths without radiological control has to be investigated in further studies. This may lead to the general recommendation to use a navigated screwdriver for S1-applications in image-guided PS instrumentations.
References
Kosmopoulos V, Schizas C (2007) Pedicle screw placement accuracy: a meta-analysis. Spine 32:E111–E120
Zdichavsky M, Blauth M, Knop C, Lotz J, Krettek C, Bastian L (2004) Accuracy of pedicle screw placement in thoracic spine fractures. Part II: a retrospective analysis of 278 pedicle screws using computed tomographic scans. Eur J Trauma 30:241–247
Laine T, Lund T, Ylikoski M, Lohikoski J, Schlenzka D (2000) Accuracy of pedicle screw insertion with and without computer assistance: a randomized controlled clinical study in 100 consecutive patients. Eur Spine J 9:235–240
Fan Chiang CY, Tsai TT, Chen LH, Lai PL, Fu TS, Niu CC, Chen WJ (2012) Computed tomography-based navigation-assisted pedicle screw insertion for thoracic and lumbar spine fractures. Chang Gung Med J 35(4):332–338
Farber GL, Place HM, Mazur RA, Jones DE, Damiano TR (1995) Accuracy of pedicle screw placement in lumbar fusions by plain radiographs and computed tomography. Spine 20(13):1494–1499
Berlemann U, Heini P, Müller U, Stoupis C, Schwarzenbach O (1997) Reliability of pedicle screw assessment utilizing plain radiographs versus CT reconstruction. Eur Spine J 6:406–410
Rao G, Brodke DS, Rondina M, Bacchus K, Dailey AT (2003) Inter- and intraobserver reliability of computed tomography in assessment of thoracic pedicle screw placement. Spine 28(22):2527–2530
Silbermann J, Riese F, Allam Y, Reichert T, Koeppert H, Gutberlet M (2011) Computer tomography assessment of pedicle screw placement in lumbar and sacral spine: comparison between free-hand and O-arm based navigation techniques. Eur Spine J 20:875–881
Beck M, Mittlmeier T, Gierer P, Harms C, Gradl G (2009) Benefit and accuracy of intraoperative 3D-imaging after pedicle screw placement: a prospective study in stabilizing thoracolumbar fractures. Eur Spine J 18(10):1469–1477
Schnake KJ, König B, Berth U, Schröder RJ, Kandziora F, Stöckle U, Raschke M, Haas NP (2004) Accuracy of CT-based navigation of pedicle screws in the thoracic spine compared with conventional technique. Unfallchirurg 107:104–112
Tormenti M, Kostov DB, Gardner PA, Kanter AS, Spiro RM, Okonkwo DO (2010) Intraoperative computed tomography image-guided navigation for posterior thoracolumbar spinal instrumentation in spinal deformity surgery. Neurosurg Focus 28(3):E11
Larson AN, Santos ERG, Polly DW Jr, Ledonio CG, Sembrano JN, Mielke CH, Guidera KJ (2012) Pediatric pedicle screw placement using intraoperative computed tomography and 3-dimensional image-guided navigation. Spine 37:E188–E194
Panjabi MM, O’Holleran JD, Crisco JJ 3rd, Kothe R (1997) Complexity of the thoracic spine pedicle anatomy. Eur Spine J 6(1):19–24
Tian NF, Xu HZ (2009) Image-guided pedicle screw insertion accuracy: a meta-analysis. Int Orthop 33:895–903
Amiot LP, Lang K, Putzier M, Zippel H, Labelle H (2000) Comparative results between conventional and computer-assisted pedicle screw installation in the thoracic, lumbar, and sacral spine. Spine 25(5):606–614
Holly LT, Foley KT (2003) Intraoperative spinal navigation. Spine 28:54–61
Shin MH, Ryu KS, Park CK (2012) Accuracy and safety in pedicle screw placement in the thoracic and lumbar spines: comparison study between conventional C-arm fluoroscopy and navigation coupled with O-arm® guided methods. J Korean Neurosurg Soc 52:204–209
Van de Kelft E, Costa F, Van der Planken D, Schils F (2012) A prospective multicenter registry on the accuracy of pedicle screw placement in the thoracic, lumbar, and sacral levels with the use of the O-arm imaging system and StealthStation Navigation. Spine 37(25):E1580–E1587
Waschke A, Walter J, Duenisch P, Reichart R, Kalff R, Ewald C (2013) CT-navigation versus fluoroscopy-guided placement of pedicle screws at the thoracolumbar spine: single center experience of 4,500 screws. Eur Spine J 22:654–660
Gelalis ID, Paschos NK, Pakos EE, Politis AN, Arnaoutoglou CM, Karageorgos AC, Ploumis A, Xenakis TA (2012) Accuracy of pedicle screw placement: a systematic review of prospective in vivo studies comparing free hand, fluoroscopy guidance and navigation techniques. Eur Spine J 21:247–255
Rivkin MA, Yocom SS (2014) Thoracolumbar instrumentation with CT-guided navigation (O-arm) in 270 consecutive patients: accuracy rates and lessons learned. Neurosurg Focus 36(3):E7. doi:10.3171/2014.1.FOCUS13499
Kleck CJ, Cullilmore I, LaFleur M, Lindley E, Rentschler ME, Burger EL, Cain CM, Patel VV (2016) A new 3-dimensional method for measuring precision in surgical navigation and methods to optimize navigation accuracy. Eur Spine J 25(6):1764–1774
Zausinger S, Scheder B, Uhl E, Heigl T, Morhard D, Tonn JC (2009) Intraoperative computed tomography with integrated navigation system in spinal stabilizations. Spine 34(26):2919–2926
Mathew JE, Mok K, Goulet B (2013) Pedicle violation and navigational errors in pedicle screw insertion using the intraoperative O-arm: a preliminary report. Int J Spine Surg 7:e88–e94
Nottmeier EW, Seemer W, Young PM (2009) Placement of thoracolumbar pedicle screws using three-dimensional image guidance: experience in a large patient cohort. J Neurosurg Spine 10(1):33–39
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares that there is no competing interest.
Funding
None were declared.
Disclosures
The device (O-arm) is FDA-approved or approved by corresponding national agency for this indication. This research was not sponsored by an organization. The authors declare that they have full control of all primary data and that they allow the journal to review their data if requested. Thomas R. Blattert has received honoraria from AOSpine, Aesculap, Medtronic, SponTech, and Magnifi. For the remaining author none were declared.
Rights and permissions
About this article

Cite this article
Balling, H., Blattert, T.R. Rate and mode of screw misplacements after 3D-fluoroscopy navigation-assisted insertion and 3D-imaging control of 1547 pedicle screws in spinal levels T10-S1 related to vertebrae and spinal sections. Eur Spine J 26, 2898–2905 (2017). https://doi.org/10.1007/s00586-017-5108-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00586-017-5108-5