
Abstract
A mathematical model of magneto electro-thermoelasticity has been constructed in the context of a new consideration of fractional Green-Naghdi heat conduction law without energy dissipation. The governing coupled equations are applied to a one-dimensional problem for a perfect conducting spherical cavity subjected to an arbitrary thermal shock in the presence of a uniform magnetic field. By means of the Laplace transform and numerical Laplace inversion, the problems are solved. The distributions of the considered temperature, stress and displacement are represented graphically. Some comparisons are shown in the figures to estimate the effects of the fractional order and relaxation time.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
It is well known that in thermoelasticity theory the usual theory of heat conduction based on Fourier’s law predicts infinite heat propagation speed proposed by Biot (1956). It is also known that heat transmission at low temperature propagates by means of waves. These aspects have caused intense activity in the field of heat propagation. Extensive reviews on the second sound theories (hyperbolic heat conduction) are given in Lord-Shulman (1967), Joseph and Preziosi (1990), Chandrasekharaiah (1998) or Hetnarski and Ignaczak (1999). The anisotropic case was later developed by Sherief and Dhaliwal (1980) and Ezzat and El-Karamany (2002). Within the theoretical contributions to the subject are the proofs of uniqueness theorems by Ezzat and El Karamany (2003) and the boundary element formulation was done by El Karamany and Ezzat (2002). Among the contributions to this theory are (Lata et al. 2016, Abbas and Kumar 2016, Ezzat et al. 2001, Aatef and Abbas 2016 and Abbas and marin 2017).
Green and Naghdi (1991, 1992, 1993) proposed generalized thermoelasticity theories by suggesting three models which are subsequently referred to as GN-I, II, and III models. Many works were devoted to investigate various theoretical and practical aspects in thermoelasticity, in the context of GN theories. Chandraskharaiah (1996) introduced a note on the uniqueness of solution in the linear theory of thermoelasticity without energy dissipation. Ezzat et al. (2009) introduced a mathematical model of magneto-thermoelasticity based on GN theories. Ciarletta (2009) introduced the theory of micropolar thermoelasticity without energy dissipation and Chirita and Ciarletta (2010) constructed reciprocal and variational principle in thermoelasticity without energy dissipation. El-Karamany, Ezzat (2016) proposed three models of GN generalized thermoelasticity and Alzahrani and Abbas (2016) studied the effect of magnetic field on a thermoelastic fiber-reinforced material under GN-III theory.
Fractional calculus has been used successfully to modify many existing models of physical processes. Caputo and Mainardi (1971) and Caputo (1974) found good agreement with experimental results when using fractional derivatives for description of viscoelastic materials and established the connection between fractional derivatives and the theory of linear viscoelasticity. Povstenko (2009) made a review of thermoelasticity that uses fractional heat conduction equation and proposed and investigated new models that use fractional derivative in Ref. Povstenko (2005). Recently, Sherief et al. (2010) constructed a new theory of fractional thermoelasticity based on Lord-Shulman theory (1967). Ezzat (2011, 2012) established a fraction model for the heat conduction using the Taylor–Riemann series expansion of time-fractional order. More applications of the fractional models in continuum mechanics can be found in the references: El-Karamany and Ezzat (2011a, b), Ezzat and El-Karamany (2011a, b), Ezzat and Fayik (2013), Ezzat and El-Bary (2012, 2017a, b), Ezzat et al. (2013, 2014, 2015, 2017), Hendy et al. (2017) and Abbas (2015).
The constitutive equations with a fractional Maxwell–Cattaneo heat conduction law using the Caputo fractional derivative and the fractional order heat transport equation are obtained El-Karamany and Ezzat (2017). The uniqueness theorem is proved, the reciprocity relation is deduced and the variational characterization of solution is given. Seven thermoelasticity theories result from the given problem as special cases.
In the current work, a modified law of heat conduction including fractional order of time derivative is constructed and replaces the conventional Fourier’s law in Green and Naghdi generalized thermoelasticity. The general solution in the Laplace transform domain is obtained and applied to one-dimensional problem of a thermoelastic spherical cavity which is thermally shocked on its bounding plane in the presence of a constant magnetic field. The inversion of the Laplace transforms is carried out using a numerical approach proposed by Honig and Hirdes (1984). The numerical values of the temperature, displacement and stress will be illustrated graphically.
2 Derivation of fractional heat equation in GN thermoelasticity without energy dissipation
Green and Naghdi (1993) developed a model of thermoelasticity theory without energy dissipation, which includes thermal displacement gradient among the constitutive variables and proposed a heat conduction law as
where \( \dot{\upsilon } = T \) and \( \upsilon \) is the thermal displacement gradient. Here \( k^{*} ( > 0) \) is a material constant characteristic of the theory.
The energy equation in terms of the heat flux vector \( \vec{q} \) is
By using Taylor–Riemann series expansion of time-fractional order \( \alpha \) to expand \( \vec{q}(x,\;t + \tau_{o} ) \) and retaining terms up to order \( \alpha \) in the thermal relaxation time \( \tau_{o} \), we get
From a mathematical viewpoint, fractional GN heat conduction law is given by
Taking the partial time derivative of fraction order \( \alpha \) of Eq. (2), we get
Multiplying Eq. (5) by \( \tau_{o}^{\alpha } /\alpha ! \) and adding to Eq. (2) we have
Substituting from Eq. (4), we get
Differentiating Eq. (7) with respect to time, we have
Equation (8) represents Green-Naghdi heat transfer equation without energy dissipation with time fractional derivative \( \alpha \) and relaxation time \( \tau_{o} \).
2.1 Limiting cases
-
1.
Eq. (8) in the limiting case \( \tau_{o} = 0 \) transforms to Green–Naghdi heat conduction equation of type II (GN).
-
2.
Eq. (8) in the limiting case \( \alpha = 1,\;\tau_{o} \ne 0 \) transforms to the single-phase-lag Green–Naghdi heat conduction equation of type II (SPGN)
-
3.
In the case \( \;0 < \alpha < 1 \), the correspondent equation for the fractional thermoelasticity theories result (FGN).
3 Basic equations
We shall consider a homogeneous, isotropic, perfect conductive thermoelastic medium permeated by an initial magnetic field H. Due to the effect of this magnetic field there arises in the conducting medium an induced magnetic field h and induced electric field E. Also, there arises a force F (the Lorentz Force). Due to the effect of the force, points of the medium undergo a displacement vector u, which gives rise to a temperature. The linearized equations of electromagnetism for slowly moving media
The above equations are supplemented by the displacement equations
where \( F_{i} \) is the Lorentz force given by
The constitutive equation
The fractional GN heat equation without energy dissipation in the absence of heat sources has the form
The strain–displacement relations
together with the previous equations, constitute a complete system of fraction Green-Naghdi (FGN) electro-magneto-thermoelasticity without energy dissipation for a perfect conductive medium.
4 Formulation of the problem
Let \( (r,\vartheta ,\varphi ) \) denote spherical polar coordinates and take the origin of the coordinate system at the center of a spherical cavity with radius \( a \) occupying the region \( a \le r < \infty \). The sphere is placed in a magnetic field with constant intensity \( \varvec{H}\text{ = (0,\,0,}\,H_{o} \text{)} \). We note that due to spherical symmetry, the only non-vanishing displacement component is the radial one \( u_{r} = u(r,t) \) and the induced field components in the sphere are obtained from Eqs. (9)–(12) in the forms
The simplified linear equations of electrodynamics for a perfectly electrically conducting elastic solid are (Ezzat 2006):
The components of strain tensor are given by
The radial component of Lorentz force can be obtained from Eqs. (14) and (18) in the form
The equation of motion (13) yield
Applying the div operator to both sides of Eq. (24), we obtain
where \( \nabla^{2} \) is the 1D Laplace’s operator in spherical polar coordinates, given by
The components of the stress tensor are given by
In order to solve the problem, we assumed that the initial conditions of the problem are taken to be homogeneous, i.e.,
while the boundary conditions are taken as follows:
(i) The surface of the cavity are traction free (zero stress) i.e.,
(ii) The thermal boundary condition is that the surface of the cavity subjected to a thermal shock that is a function of time
Let us introduce the following non-dimensional variables: \( \begin{aligned} r^{\prime } = c_{o} {\kern 1pt} \zeta_{o} r,\quad u^{\prime } = c_{o} {\kern 1pt} \zeta_{o} u,\quad t^{\prime } = c_{o}^{2} {\kern 1pt} \zeta_{o} t,\quad \sigma^{\prime } = \frac{\sigma }{\lambda + 2\mu },\quad \theta^{*} = \frac{{\gamma (T - T_{o} )}}{\lambda + 2\mu },\quad k^{ * \prime } = \frac{{k^{ * } }}{{\rho \,C_{E} c_{o}^{2} }},\quad {\kern 1pt} \hfill \\ J^{\prime } = \frac{J}{{c_{o} H_{o} \zeta_{o} }},\quad h^{\prime } = \frac{h}{{H_{o} }},\quad E^{\prime } = \frac{E}{{\mu_{o} H_{o} c_{o} }},\quad \zeta_{o} = \rho \,C_{E} /k,\quad c_{o}^{2} = \frac{\lambda + 2\mu }{\rho }\quad \hfill \\ \end{aligned} \)
The governing equations, in nondimensional form are given by:
where \( a_{o} = \sqrt {\mu_{o} H_{o}^{2} /\rho } \) is Alfven velocity, \( c = \sqrt {1/\varepsilon_{o} \mu_{o} } \) is light speed, \( V = c_{o} {\kern 1pt} /c, \) \( \beta = \sqrt {(\lambda + 2\mu )/\mu } \) and \( \varepsilon = T_{o} \gamma^{2} /(\lambda + 2\mu )\rho \,C_{E} \) is thermoelastic coupling parameter.
5 Solution in the Laplace transform domain
Performing the Laplace transform defined by the relation
of both sides Eqs. (30)–(36), we get
where \( a_{1} = {1 \mathord{\left/ {\vphantom {1 {\left( {1 + \frac{{a_{o}^{2} }}{{c_{o}^{2} }}} \right)}}} \right. \kern-0pt} {\left( {1 + \frac{{a_{o}^{2} }}{{c_{o}^{2} }}} \right)}}, \) \( a_{2} = {{\left( {1 + \frac{{a_{o}^{2} }}{{c_{o}^{2} }}} \right)} \mathord{\left/ {\vphantom {{\left( {1 + \frac{{a_{o}^{2} }}{{c_{o}^{2} }}} \right)} {\left( {1 + \frac{{a_{o}^{2} }}{{c_{{}}^{2} }}} \right)}}} \right. \kern-0pt} {\left( {1 + \frac{{a_{o}^{2} }}{{c_{{}}^{2} }}} \right)}} \) and \( a_{3} = {{s^{2} \left( {1 + \frac{{\tau_{o}^{\alpha } }}{\alpha !}s^{\alpha } } \right)} \mathord{\left/ {\vphantom {{s^{2} \left( {1 + \frac{{\tau_{o}^{\alpha } }}{\alpha !}s^{\alpha } } \right)} {k^{*} }}} \right. \kern-0pt} {k^{*} }} \)
The boundary conditions (28) and (29) have the form in the Laplace transform
By eliminating \( \bar{e} \) between Eqs. (40) and (41), we get
The above equation can be factorized as
where \( k_{1}^{2} {\text{ and}}\;k_{2}^{2} \) are the positive roots of the characteristic equation
The solution which satisfies Eq. (46) takes the form
By using Eq. (40), we get
Hence, the displacement is given by
The induced electric and magnetic fields can be deduced as
Using the boundary conditions (44) and (45), we obtain the following system of two linear equations
By solving the above two linear equations, we have
This completes the solution in the Laplace transform domain.
6 Numerical inversion of the Laplace transforms
In order to invert the Laplace transform in the above equations, we adopt a numerical inversion method based on a Fourier series expansion (Honig and Hirdes, 1984). In this method, the inverse g (t) of the Laplace transform \( \bar{g}\,(s) \) is approximated by the relation
where c* is an arbitrary constant greater than all the real parts of the singularities of g(t) and N is sufficiently large integer chosen such that,
where ε is a prescribed small positive number that corresponds to the degree of accuracy required
Using the numerical procedure cited, to invert the expressions of the considered fields in Laplace transform domain. The variation of the temperature, displacement and radial component of stress is plotted for different cases.
7 Numerical results and discussion
In this section, we aim to illustrate the numerical results of the analytical expressions obtained in the previous section and explain the influence of fractional orders on the behavior of the field quantities in GN thermoelasticity theory without energy dissipation.
The method based on a Fourier series expansion proposed by Honig and Hirdes (1984) and developed in detail in many works such as Ezzat (1994) and Ezzat et al. (1996) is adopted to invert the Laplace transform in Eqs. (49)–(53).
Copper material was chosen for the purposes of numerical evaluation. The constant of the problem is given in Table 1 as in Ref. (Ezzat and El-Bary 2017a).
Let us consider that f(t) is exponentially decreasing in time described mathematically as:
The numerical technique outlined above was used to obtain the temperature, strain, displacement and stress. The results are displayed graphically at different positions of x as shown in Figs. 1, 2, 3, 4.

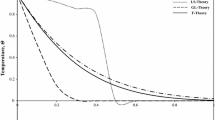
The variation of temperature for different theories

The variation of strain for different theories

The variation of displacement for different theories

The variation of stress for different theories
Figure 1 depicts the space variation of temperature with distance x for different values of the fractional order \( \alpha \) at different values of time, namely \( t = 0.05,\;0.15 \). We noticed that the solution corresponding to the GN theory of type II (\( \tau_{o} = 0 \)) that the thermal waves propagate with finite speeds, so the value of the temperature is identically zero for any large value of x (Sherief and Abd El-Latief 2015). While in single phase lag GN theory of type II (SPLGN, \( \alpha = 1 \)), the response to the thermal effect does not reach infinity instantaneously but remains in a bounded region. We observed also that in fractional GN theory of type II (FGN, \( \alpha = 0.2 \)), the temperature field has been affected by the fractional order \( \alpha \), where the decreasing of the value of the parameter \( \alpha \) causes decreasing in the amplitude of the thermal waves.
Figures 2, 3 and 4 show the variation of strain, displacement and stress distributions for different theories in the present (\( a_{o} > 0 \)) or absent (\( a_{o} = 0 \)) of the magnetic field. It was found that the fractional order theory of GN thermoelasticity of type II predicts a value for strain e and displacement u less than that predicted by the generalized GN theory of type II, while the value of the radial component of stress \( \sigma_{rr} \) is greater in the fractional theory.
The Alfven velocity \( a_{o} \) acts to decrease the strain, displacement and magnitude of stress distributions. This is mainly due to the fact that the magnetic field corresponds to a term signifying a positive force that tends to accelerate the charge carries.
8 Conclusions
The magneto–electro thermoelastic analysis in the context of a new consideration of Green-Naghdi heat conduction law without energy dissipation problem of a perfect conducting spherical cavity based upon fractional time derivatives theory is presented. The main contribution in this article is to describe the effects of fractional order on temperature, strain, displacement, and stress distributions. According to this theory we have to construct a new classification for FGN of type II, materials according to their, fractional order where this parameter becomes a new indicator of its ability to conduct heat in conducting medium.
Abbreviations
- \( \lambda ,\,\mu \) :
-
Lame’s constants
- ρ :
-
Density
- t :
-
Time
- \( C_{E} \) :
-
Specific heat at constant strain
- \( k \) :
-
Thermal conductivity
- \( k^{*} \) :
-
Material constant characteristic
- T :
-
Temperature
- \( T_{o} \) :
-
Reference temperature
- \( \mu_{o} \) :
-
Magnetic permeability
- \( \varepsilon_{o} \) :
-
Electric permittivity
- \( \sigma_{o} \) :
-
Electric conductivity
- \( \sigma_{ij} \) :
-
Components of stress tensor
- \( u_{i} \) :
-
Components of displacement vector
- \( C_{o} \) :
-
\( = \left[ {(\lambda + 2{\kern 1pt} \mu \,){\kern 1pt} /\,\rho } \right]{\kern 1pt}^{1/2} \), speed of propagation of isothermal elastic waves
- η o :
-
\( = \rho \,C_{E} /k \)
- \( \vartheta \) :
-
\( = T - T_{0} \), such that \( \left| {\theta /T_{0} } \right| < < 1, \)
- q i :
-
Components of heat flux vector
- E :
-
Components of electric field vector
- J :
-
Components electric density vector
- H :
-
Magnetic field intensity vector
- e :
-
Dilatation
- \( \alpha_{T} \) :
-
Coefficient of linear thermal expansion
- γ:
-
\( = (3\lambda + 2\mu )\alpha_{T} \)
- \( \delta_{ij} \) :
-
Kronecker delta function
- Q:
-
The intensity of applied heat source per unit volume
References
Aatef DH, Abbas IA (2016) Analytical solution of magnetothermoelastic interaction in a fiber-reinforced anisotropic material. Euro Phys J 31:424
Abbas IA (2015) Eigenvalue approach on fractional order theory of thermoelastic diffusion problem for an infinite elastic medium with a spherical cavity. Appl Math Model 39:6196–6206
Abbas IA, Kumar R (2016) 2D deformation in initially stressed thermoelastic half-space with voids. Steel Compos Struct 20:1103–1117
Abbas IA, Marin M (2017) Analytical solution of thermoelastic interaction in a half-space by pulsed laser heating.”. Physica E 87:254–260
Alzahrani FS, Abbas IA (2016) The effect of magnetic field on a thermoelastic fiber-reinforced material under GN-III theory. Steel Compos Struct Int J 22:369–386
Biot M (1956) Thermoelasticity and irreversible thermodynamics. J Appl Phys 27:240–253
Caputo M (1974) Vibrations on an infinite viscoelastic layer with a dissipative memory. J Acous Soc Am 56:897–904
Caputo M, Mainardi F (1971) Linear model of dissipation in an elastic solids. La Rivista del Nuovo Cimento 1:161–198
Chandrasekharaiah DS (1998) Hyperbolic thermoelasticity: a review of recent literature. Appl Mechs Rev 51:705–729
Chandraskharaiah DS (1996) A note on the uniqueness of solution in the linear theory of thermoelasticity without energy dissipation. J Elas 43:279–283
Chirita S, Ciarletta M (2010) Reciprocal and variational principles in linear thermoelasticity without energy dissipation. Mech Res Commun 37:271–275
Ciarletta MA (2009) Theory of micropolar thermoelasticity without energy dissipation. J Therm Stress 22:581–594
El-Karamany AS, Ezzat MA (2002) On the boundary integral formulation of thermo—viscoelasticity theory. Int J Eng Sci 40:1943–1956
El-Karamany AS, Ezzat MA (2011a) On fractional thermoelastisity. Math Mech Solids 16:334–346
El-Karamany AS, Ezzat MA (2011b) Convolutional variational principle, reciprocal and uniqueness theorems in linear fractional two-temperature thermoelasticity. J Therm Stress 34:264–284
El-Karamany AS, Ezzat MA (2016) On the phase-lag Green-Naghdi thermoelasticity theories. Appl Math Model 40:5643–5659
El-Karamany AS, Ezzat MA (2017) Fractional phase-lag Green-Naghdi thermoelasticity theories. J Therm Stress 40:1063–1078
Ezzat MA (1994) State space approach to unsteady two-dimensional free convection flow through a porous medium. Can J Phys 72:311–317
Ezzat MA (2006) The relaxation effects of the volume properties of electrically conducting viscoelastic material. J Mater Sci Eng B 130:11–23
Ezzat MA (2011) Thermoelectric MHD with modified Fourier’s law. Int J Therm Sci 50:449–455
Ezzat MA (2012) State space approach to thermoelectric fluid with fractional order heat transfer. Heat Mass Transf 48:71–82
Ezzat MA, El-Bary AA (2012) MHD Free convection flow with fractional heat conduction law. MHD 48:587–606
Ezzat MA, El-Bary AA (2017a) Generalized fractional magneto-thermo-viscoelasticity. Micro Sys 23:1767–1777
Ezzat MA, El-Bary AA (2017b) Application of fractional order theory of magneto-thermoelasticity to an infinite perfect conducting body with a cylindrical cavity. Micro Sys 23:2447–2458
Ezzat MA, El-Karamany AS (2002) The uniqueness and reciprocity theorems for generalized thermoviscoelasticity for anisotropic media. J Therm Stress 25:507–522
Ezzat MA, El-Karamany AS (2003) On uniqueness and reciprocity theorems for generalized thermo-viscoelasticity with thermal relaxation. Can J Phys 81:823–833
Ezzat MA, El-Karamany AS (2011a) Fractional order heat conduction law in magneto-thermoelasticity involving two temperatures. ZAMP 62:937–952
Ezzat MA, El-Karamany AS (2011b) Theory of fractional order in electro-thermoelasticity. Eur J Mech A/Solid 30:491–500
Ezzat MA, Fayik M (2013) Fractional order theory of thermoelastic diffusion. J Therm Stress 34:851–872
Ezzat MA, Zakaria M, Shaker O, Barakat F (1996) State space formulation to viscoelastic fluid flow of magnetohydrodynamic free convection through a porous medium. Acta Mech 119:147–164
Ezzat MA, El-Karamany AS, Samaan AA (2001) State-space formulation to generalized thermoviscoelasticity with thermal relaxation. J Therm Stress 24:823–846
Ezzat MA, El-Karamany AS, El-Bary AA (2009) State space approach to one-dimensional magneto-thermoelasticity under the Green-Naghdi theories. Can J Phys 87:867–878
Ezzat MA, El-Bary AA, Fayik M (2013) Fractional Fourier law with three-phase lag of thermoelasticity. Mech Adv Mater Struct 20:593–602
Ezzat MA, El-Karamany AS, El-Bary AA (2014) Generalized thermo-viscoelasticity with memory-dependent derivatives. Int J Mech Sci 89:470–475
Ezzat MA, El-Karamany AS, El-Bary AA (2015) A novel magnetothermoelasticity theory with memory-dependent derivative. J Electromagn Waves Appl 29:1018–1031
Ezzat MA, El-Karamany AS, El-Bary AA (2017) Thermoelectric viscoelastic materials with memory-dependent derivative. Smart Struct Sys 19:539–551
Green AE, Naghdi PM (1991) A re-examination of the basic postulates of thermomechanics. Proc Roy Soc Lond A 432:171–194
Green AE, Naghdi PM (1992) On undamped heat waves in an elastic solid. J Therm Stress 15:253–264
Green AE, Naghdi PM (1993) Thermoelasticity without energy dissipation. J Elast 31:189–208
Hendy MH, Amin MM, Ezzat MA (2017) Application of fractional order theory to a functionally graded perfect conducting thermoelastic half space with variable Lamé’s Modulii. Micro Sys 23:4891–4902
Hetnarski RB, Ignaczak J (1999) Generalized thermoelasticity. J Therm Stress 22:451–476
Honig G, Hirdes U (1984) A method for the numerical inversion of the Laplace transform. J Compu Appl Math 10:113–132
Joseph DD, Preziosi L (1990) Addendum to the paper: heat waves. Rev Mod Phys 62:375–391
Lata P, Kumar R, Sharma N (2016) Plane waves in an anisotropic thermoelastic. Steel Compos Struct 22:567–587
Lord H, Shulman YA (1967) A generalized dynamical theory of thermoelasticity. J Mech Phys Solids 15:299–309
Povstenko YZ (2005) Fractional heat conduction equation and associated thermal stresses. J Therm Stress 28:83–102
Povstenko YZ (2009) Thermoelasticity which uses fractional heat conduction equation. J Math Sci 162:296–305
Sherief HH, Abd El-Latief A (2015) A one-dimensional fractional order thermoelastic problem for a spherical cavity. Math Mech Solids 20:512–521
Sherief H, Dhaliwal R (1980) A uniqueness theorem and a variational principle for generalized thermoelasticity. J Therm Stress 3:223–231
Sherief HH, El-Said AA, Abd El-Latief A (2010) Fractional order theory of thermoelasticity. Int J Solids Strucs 47:269–275
Acknowledgements
The authors gratefully acknowledge the approval and the support of this research study by the Grant No. SCI-2017-1-7-F-6972 from the Deanship of Scientific Research in Northern Border University, Arar, KSA.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Hendy, M.H., Amin, M.M. & Ezzat, M.A. Magneto-electric interactions without energy dissipation for a fractional thermoelastic spherical cavity. Microsyst Technol 24, 2895–2903 (2018). https://doi.org/10.1007/s00542-017-3643-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-017-3643-y