
Abstract
This paper investigates a finite-time adaptive fuzzy prescribed performance fault-tolerant control (FTC) issue for the steer-by-wire vehicle (SBWV) systems with intermittent actuator faults. Different from the steer-by-wire (SBW) system studied by the previous literatures, the SBWV system involved in this study consists of a vehicle dynamics model and an SBW system, including unmeasurable states and unknown nonlinear dynamics. Fuzzy logic systems (FLSs) are first used to identify the unknown model dynamics, and a fuzzy state observer is constructed to estimate the unmeasured states. Then, to compensate for the influence of intermittent actuator faults, a novel finite-time output-feedback prescribed performance adaptive FTC scheme is developed by using the adaptive backstepping control methodology and co-designing the last virtual controller. The presented control scheme not only guarantees that all signals of the closed-loop system are bounded in the presence of actuator faults, but also ensures that the tracking error converges to a small neighborhood of the zero within the prescribed performance bounded. The computer simulation and comparison results demonstrate the effectiveness of the proposed fuzzy control algorithm.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the past decade, intelligent manufacturing has made significant progress in various fields [1, 2], and automotive intelligent technology has also made significant progress, which has led to the widespread adoption of steer-by-wire (SBW) technology in automatic and semi-automatic intelligent vehicles. The SBW system transmits steering commands through electronic signals, replacing the traditional mechanical connection, which can control the vehicle steering behavior more accurately. The application of this technology improves driving safety and stability [3]. To achieve better steering effect and vehicle stability, some significant control results are reported [4,5,6,7]. In [4], a proportional-integral-derivative control method was applied to improve vehicle steering dynamics. In [5], a robust weighted gain-scheduling control method was applied to ensure vehicle yaw stability. By using the simplified linear model, a model predictive control method was developed in [6] to regulate steering of SBW systems. In [7], a super-twisting adaptive control method was designed for SBW systems. Note that in the practical engineering, since the considered steering systems and vehicle dynamic model are often complex and uncertainties, which makes it difficult to obtain precise models. Hence, the traditional control methods such as [4,5,6,7] can not obtain better control performance. To overcome this problem, some intelligent (fuzzy or neural network) control techniques have been investigated for the steering systems and vehicle model with unknown nonlinear dynamics [8,9,10]. In [8], the authors developed an adaptive neural network discrete-time control scheme. In [9], the authors proposed an adaptive hybrid learning neural network control scheme and achieved the accurate tracking control performance. In addition, utilizing the Takagi-Sugeno fuzzy model, the authors [10] introduced a model predictive control method and realized the stability of the vehicle systems.
It is worth mentioning that actuator faults are common during the operation of the steering system, which may lead to a decrease in the required control performance and even instability of the vehicle system. Therefore, many scholars have investigated the FTC problem of SBW systems in the presence of actuator fault. In [11], a sliding mode predictive FTC strategy for SBW systems was proposed. In [12], a reinforcement-learning-based FTC scheme was proposed. However, references [11, 12] only addressed the compensation problem for one-time actuator faults, where the state of the actuator remains unchanged after the fault occurs. In practice, actuator often encounters various unpredictable intermittent faults. The state of the actuator often switches between normal operation and faults (or between various faults). For intermittent actuator faults. In [13], a nonlinear system adaptive compensation FTC method based on steering function technology was proposed. In [14], an adaptive neural network output feedback FTC method for nonlinear systems was proposed.
However, the above mentioned control schemes all assume that states of the controlled systems are completely measurable, and there are little research methods on the steer-by-wire systems with unmeasurable states. Note that when the states are unmeasurable, the state observer becomes an extremely effective technique for solving the problem of unmeasurable states. In [15,16,17], the observer-based control schemes were applied to control the steer-by-wire systems with unmeasurable states. However, the control schemes proposed in [15,16,17] all assume that the controlled steer-by-wire systems are free of actuator faults. In addition, these output feedback control schemes developed based on asymptotic stability theory, which only ensures the stability of the controlled system in infinite-time. For many practical systems, such as the steering system addressed in this study, it is usually more desirable for the state to converge to a stable equilibrium point within a finite-time, such as [18,19,20], and achieve tracking error convergence within a specified performance limit, such as [20, 21]. Note that the above control methods are all focus on the SBW systems or the vehicle dynamics systems, not the steer-by-wire vehicle (SBWV) systems addressed by this study, so they cannot reflect the changes of the steering wheel self-aligning torque and vehicle stability during the actual operation of the vehicle as what pointed out by [22]. At the same time, there are currently no research schmes on the adaptive intelligent output feedback finite-time prescribed performance control for the nonlinear SBW system with unmeasurable states and intermittent actuator faults, which inspires us to develop this study.
Based on the aforementioned research, this paper investigates the fuzzy finite-time output feedback control for the uncertain steer-by-wire vehicle (SBWV) systems with unmeasurable states and intermittent actuator faults. FLSs are used to identify the unknown dynamics and a fuzzy state observer is designed to estimate the immeasurable states. Prescribed performance function is introduced to ensure the transient performance. Subsequently, a novel finite-time prescribed performance adaptive fuzzy FTC scheme is proposed based on backstepping technique and finite-time control theory. The main contributions of this study are as follows
-
1.
This paper first investigates the fuzzy adaptive control problem of uncertain SBWV system. The previous intelligent adaptive control methods [8, 9] were only applicable to the SBW system, which does not consider the vehicle dynamics model. However, this paper studies the control problem of the SBWV system composed of the SBW system and the vehicle dynamic model, which can accurately represent the dynamic response of the SBW system and changes in vehicle stability.
-
2.
This paper first proposes a fuzzy finite-time adaptive output feedback FTC scheme for the SBWV system with intermittent actuator faults by designing a novel fuzzy state observer. Therefore, the proposed controller not only addresses the issues of unmeasurable states and actuator faults, but also guarantees that the SBWV system is stable within a finite-time interval and the tracking error does not exceed the prescribed performance bound. Although [23] studied intermittent faults in a SBW system, it depends on measurable states and asymptotic stability theory, and it can not guarantee the transient performance of the system.
2 Problem formulation and preliminaries
2.1 Steer-by-wire vehicle system model
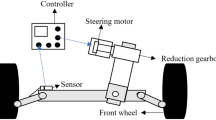
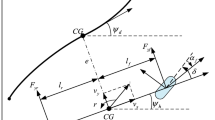
This paper considers steer-by-wire vehicle (SBWV) system, which is composed of the SBW system (1) and the vehicle dynamics model (2). The SBW system mainly includes a steering motor, reducer, and steering actuator as shown in Fig. 1. The simplified vehicle dynamics model includes two degrees of freedom, namely the lateral motion and yaw motion of the vehicle as shown in Fig. 2. From [9] and [10], the SBW system dynamics model (1) and the vehicle dynamics model (2) can be represented as:
where \({{\delta }_{f}}\) represents the front wheel steering angle. \(\mu \) represents the ratio of motor output shaft angle to front wheels steering angle. \({{J}_{eq}}={{J}_{fw}}+{{\mu }^{2}}{{J}_{sm}}\) is the equivalent moment of inertia. \({{J}_{sm}}\) is the rotational inertia of the motor. \({{J}_{fw}}\) is the front wheel rotational inertia. \({{B}_{sm}}\) is viscous friction coefficient. \({{\tau }_{sm}}\) is the motor output torque. \({{\tau }_{f,fw}}\) is the frictional torque. \({{\tau }_{d}}\) is the motor lumped torque perturbation. \(\beta \) and \(\dot{\psi }\) are vehicle sideslip angle and the yaw rate. \({{l}_{f}}\) and \({{l}_{r}}\) are distances from the front and rear wheel axle to center of gravity (CG). \({{C}_{f}}\) and \({{C}_{r}}\) are front and rear wheels cornering stiffness. \({{I}_{z}}\) is the vehicle around CG moment. \({{V}_{x}}\) is the longitudinal vehicle velocity. m is the vehicle mass.
The self-aligneding torque \({{\tau }_{a}}\) given by [22] as follows
where \({{t}_{m}}\) is the mechanical trail, \({{t}_{p}}\) is the pneumatic trail.
From (1) and (2), the SBWV system can be formulated as follows:

Structure diagram of SBW system

Vehicle dynamic model
Remark 1
Note that the previous literatures [8, 9] only considered the adaptive control problem of SBW system (1), and its self-alignedment torque is based on a simplified hyperbolic tangent function, which cannot accurately reflect the changes in self-alignedment torque under complex driving environments in actual vehicle driving. While the literature [10] only focused on vehicle control for the vehicle dynamic system (2). Different from previous studies, this paper focuses on investigating the control problem of the SBWV system (4), which is composed of the systems (1) and (2). Therefore, it can accurately describe the dynamic response of the SBW system in complex driving environments and changes in vehicle stability.
Define \(x={{[{{x}_{1}},{{x}_{2}},{{x}_{3}},{{x}_{4}}]}^{T}}={{[{{\delta }_{f}},\beta ,\dot{\psi },{{\dot{\delta }}_{f}}]}^{T}}\in {{R}^{4}}\), \({{f}_{1}}(x)={{x}_{4}}-{{x}_{2}}\), \({{f}_{2}}(x)=-\frac{{{C}_{f}}\cos {{x}_{1}}+{{C}_{r}}}{m{{V}_{x}}}{{x}_{2}}-\left( \frac{{{l}_{f}}{{C}_{f}}\cos {{x}_{1}}-{{l}_{r}}{{C}_{r}}}{mV_{x}^{2}}+1 \right) {{x}_{3}}+\frac{{{C}_{f}}\cos {{x}_{1}}}{m{{V}_{x}}}{{x}_{1}}-{{x}_{3}}\), \({{f}_{3}}(x)=-\frac{{{l}_{f}}{{C}_{f}}\cos {{x}_{1}}-{{l}_{r}}{{C}_{r}}}{{{I}_{z}}}{{x}_{2}}-\frac{l_{f}^{2}{{C}_{f}}\cos {{x}_{1}}+l_{f}^{2}{{C}_{r}}}{{{I}_{z}}{{V}_{x}}}{{x}_{3}}+\frac{{{l}_{f}}{{C}_{f}}\cos {{x}_{1}}}{{{I}_{z}}}{{x}_{1}}-{{x}_{4}}\), \({{f}_{4}}(x)=\frac{-{{C}_{f}}({{t}_{m}}+{{t}_{p}})}{{{J}_{eq}}}{{x}_{1}}+\frac{{{C}_{f}}({{t}_{m}}+{{t}_{p}})}{{{J}_{eq}}}{{x}_{2}}+\frac{{{C}_{f}}({{t}_{m}}+{{t}_{p}}){{l}_{f}}}{{{V}_{x}}{{J}_{eq}}}{{x}_{3}}-\frac{{{\mu }^{2}}{{B}_{sm}}{{x}_{4}}+{{\tau }_{f,fw}}}{{{J}_{eq}}}\).
Then, the system (4) can be rewritten as
In (5), \({\bar{h}}=\mu /{{J}_{eq}}\) represents the known control gain, \(u(t)={{\tau }_{sm}}\) represents the control input. \(d(t)=\mu {{\tau }_{d}}/{{J}_{eq}}\) represents the disturbance. Note that in the actual running of the vehicle, since the system uncertainty caused by driving changes has a large fluctuation range, \({{f}_{i}}, i=1,\ldots ,4\) are unknown nonlinear functions.
2.2 Intermittent actuator fault model
From [13] and [14], the intermittent actuator fault model is described as follows
where \(0<{\bar{\eta }}\le {{\eta }_{k}}\le 1\) with \({\bar{\eta }}\) and \({{\eta }_{k}}\) being unknown constants. \({{u}_{k}}(t) \) is the bounded signal. \(t\in [{{t}_{k}},{{t}_{k+1}})\) for \(k\in {{Z}^{+}}\), \({{t}_{k}}\) and \({{t}_{k+1}}\) denote the time instants at which the actuator fault occurs and ends.
Remark 2
Due to frequent use and aging of actuator, the actuator usually suffers intermittent faults. When the actuator encounters intermittent faults, the steering motor may not be able to generate sufficient torque to drive the front wheels according to the expected control signal, which may cause the vehicle to deviate from the expected path. Therefore, effectively handling intermittent actuator faults has become crucial. Traditional fault diagnosis and prediction methods [11, 12] are not suitable for this situation because they do not take into account the random intermittency of faults. Therefore, this paper mainly studies the SBW system affected by intermittent actuator faults.
Assumption 1
There exists a positive constant \(u_{k}^{*}\) satisfying \(\vert {{{{u}_{k}}(t)}} \vert \le u_{k}^{*}\).
Assumption 2
There exists a positive constant \({{d}^{*}}\) satisfying \(\vert {{d(t)}} \vert \le {{d}^{*}}\).
Control Objective: This study will develop a finite-time adaptive fuzzy FTC approach for the SBWV system (5) so that the following properties holds
-
1.
The controlled steer-by-wire vehicle system is semi-global practical finite-time stable (SGPFS).
-
2.
The tracking error converges to a small neighborhood of zero in a finite-time interval and does not exceed the prescribed performance bound.
2.3 Fuzzy logic systems
Since the considered SBWV system (5) contains the uncertain nonlinear dynamics, this paper will adopt the FLSs to model the SBWV system (5). In the following, we briefly review the notion and properties of the FLS.
Suppose IF-THEN fuzzy rules are as follows:
\({{\Re }^{l}}\): if \({{s}_{1}}\) is \(G_{1}^{q}\) and \({{s}_{2}}\) is \(G_{2}^{q}\) , \(\ldots \) and \({{s}_{n}}\) is \(G_{n}^{q}\), then \(\zeta \) is \({{H}^{q}}\), \(q=1,2,\cdots ,D\).
where \(s={{({{s}_{1}},{{s}_{2}},\ldots ,{{s}_{n}})}^{T}}\) and \(\zeta \) are the FLS input and output, respectively. Fuzzy set \(G_{i}^{q}\) and \({{H}^{q}}\) are fuzzy sets with the membership function \({{\mu }_{G_{i}^{q}}}({{s}_{i}})\) and \({{\mu }_{{{H}^{q}}}}(\zeta )\). D is the rule member.
Through singleton function, center average defuzzification, the FLS can be represented as
where \({{{\bar{\zeta }}}_{q}}=\underset{\zeta \in R}{\mathop {\max }}\,{{\mu }_{{{H}^{q}}}}(\zeta )\).
Define the fuzzy basis function as
Denoting \({{{\hat{W}}}^{T}}=[{{{\bar{\zeta }}}_{1}},{{{\bar{\zeta }}}_{2}},\ldots ,{{{\bar{\zeta }}}_{D}}]=[{{{\hat{W}}}_{1}},{{{\hat{W}}}_{2}},\ldots {{{\hat{W}}}_{D}}]\) and \(\Phi (s)={{\left[ {{\Phi }_{1}}(s),\ldots ,{{\Phi }_{D}}(s) \right] }^{T}}\), then FLS (9) can be rewritten as
Lemma 1
[24]: let f(s) be a continuous positive function defined on a compact set \(\Omega \). Then, there exists a FLS (10) such as
where \(\varepsilon \) is the approximation error, which is usually assumed that there exists a constant \({\bar{\varepsilon }}\) such that \(\vert \varepsilon \vert < {{\bar{\varepsilon }}} \).
Remark 3
Note that FLSs are introduced to address unknown nonlinear functions in the controlled systems (5) because they have the property of approximating unknown nonlinear functions in compact sets. Moreover, there are some other nonlinear approximators, such as NNs [14] and type-2 fuzzy logic systems, which can replace FLSs and achieve the same results.
2.4 Prescribed performance
In reference to [20, 21], the prescribed performance can be described by the following inequality:
where \({{\rho }_{\min }}>0\) and \({{\rho }_{\max }}>0\), \(\mu (t)=({{\mu }_{0}}-{{\mu }_{\infty }}){{e}^{-rt}}+{{\mu }_{\infty }}\) represents a bounded performance with \( \lim \nolimits_{t \to \infty } \mu (t) = \mu _\infty \) and r are positive design parameters, \({{\mu }_{0}}=\mu (0)\), \({{\mu }_{0}}\) is selected such that \({{\mu }_{0}}>{{\mu }_{\infty }}\). \({{\chi }_{1}}(t)=y-{{y}_{d}}\) denotes the tracking error. It follows from (5) that \(\chi (t)\) is guaranteed to be less than \(\max \{{{\rho }_{\min }}{{\mu }_{0}},{{\rho }_{\max }}{{\mu }_{0}}\}\).
In order to achieve the prescribed performance in (12), we can convert the constrained tracking error behavior into an equivalent unconstrained tracking error behavior. We define
where \(\xi \) is the converted error, \(\phi (\xi )=({{\rho }_{\max }}{{e}^{\xi }}-{{\rho }_{\min }}{{e}^{-\xi }})/({{e}^{\xi }}-{{e}^{-\xi }})\) is smooth, strictly increasing function.
From (12), one obtains
and
where \(\psi =\frac{1}{2\mu }\left( \frac{1}{\phi +{{\rho }_{\min }}}-\frac{1}{{{\rho }_{\max }}-\phi }\right) \).
Define the following state transformation
Then, we have
3 Fuzzy state observer and controller design
This section first gives the design of a fuzzy observer for the steer-by-wire vehicle system (5). Then, a fuzzy adaptive output feedback controller is presented by the finite-time theory.
3.1 Fuzzy state observer design
In practice, due to space and hardware limitations, the steering angular velocity, vehicle sideslip angle, and yaw angle are difficult to measure by sensor technology directly. Therefore, it is necessary to design a state observer to get unavailable states based on FLSs.
To begin with, we firstly use a FLS \({{{\hat{f}}}_i}(x\vert {{{\hat{W}}} _i}) = {{\hat{W}}} _i^T{\Phi _i}(x)\) to identify \({{f}_{i}}(x)\), and let
where \(W _{i}^{*}\) is the ideal weight. \({{\varepsilon }_{i}}\) is fuzzy approximating error, which is such that \(\vert {{\varepsilon _i}} \vert \le {{{\bar{\varepsilon }}} _i}\) , here \({{{\bar{\varepsilon }}}_{i}}\) is a constant.
Substituting (18) into (5) yields
We design the fuzzy observer by
In (20), \({{{\hat{x}}}_{i}}\) stands for the estimate of \({{x}_{i}}\), and \({\hat{x}}={{\left[ {{{{\hat{x}}}}_{1}},\ldots ,{{{{\hat{x}}}}_{4}} \right] }^{T}}\), \({{{\hat{W}}}_{i}}\) expresses estimate of \(W _{i}^{*}\).
Let \(e=x-{\hat{x}}\) be observer error.
Here \({{{\tilde{W}}}_{i}}=W _{i}^{*}-{{{\hat{W}}}_{i}}\), stands for parameter estimating error. \(A=\left[ \begin{matrix} -{{k}_{1}} &{} 1 &{} 0 &{} 0 \\ -{{k}_{2}} &{} 0 &{} 1 &{} 0 \\ -{{k}_{3}} &{} 0 &{} 0 &{} 1 \\ -{{k}_{4}} &{} 0 &{} 0 &{} 0 \\ \end{matrix} \right] \), \(K={{\left[ {{k}_{1}},{{k}_{2}},{{k}_{3}},{{k}_{4}} \right] }^{T}}\), \(\varepsilon ={{\left[ {{\varepsilon }_{1}},{{\varepsilon }_{2}},{{\varepsilon }_{3}},{{\varepsilon }_{4}} \right] }^{T}}\), \({{B}_{i}}={{[\underbrace{0\cdots 0,\text { 1}}_{i}\text {, }0]}^{T}}\) and \({{B}_{4}}={{[0,0,0,1]}^{T}}\).
Choose the observer gain vector K such that A is a stable matrix. That is, the following Lyapunov equation holds:
where \(Q={{Q}^{T}}>0\) is a given matrix.
Consider the Lyapunov function \({{V}_{0}}={{e}^{T}}Pe\). By (21)–(22), one has
where \({{\lambda }_{0}}=({{\lambda }_{\min }}(Q)-5)>0\), \({{M}_{0}}={{\left\| P \right\| }^{2}}{{\left\| {{\bar{\varepsilon }}} \right\| }^{2}}+{{\left\| P \right\| }^{2}}\sum \nolimits _{i=1}^{4}{{{\left\| W _{i}^{*} \right\| }^{2}}}+{{\left\| P \right\| }^{2}}{{d}^{*2}}.\)
Remark 4
Note that since a FLS has a good approximating ability of a nonlinear function, \({{\left\| {{\bar{\varepsilon }}} \right\| }^{2}}\) can be made smaller if the number of the IF-Then rules is chosen enough. In addition, if the considered SBWV (5) are free of the disturbance \({{d}^{*2}}=0\). Therefore, when \({{\lambda }_{0}}=({{\lambda }_{\min }}(Q)-5)>0\) is selected large enough, we can conclude from (20) that the observer error vector can be smaller. Therefore, the designed fuzzy state observer (16) is reasonable.
3.2 Finite-time fuzzy adaptive controller design
This section will present the output feedback finite-time prescribed performance adaptive fuzzy FTC design based on the prescribed performance function and finite time concept. Then the stability proof of the controlled system is given.
Define the coordinate transformations as
where \({{\chi }_{1}}\) is the tracking error, \({{z}_{i}}\) is the error surface, \({{s}_{i}}\) is the output error of one-order filter, \({{\alpha }_{i-1}}\) is the virtual controller, \({{\omega }_{i}}\) is newly introduced state variable obtained by the one-order filter as follows
where \({{\kappa }_{i}}\) is a positive design parameter.
By using the above coordinate transformations (25) and the first-order filter (26), 4-step adaptive backstepping control design procedures are given for the SBWV system (5).
Step 1: By (5), (17) and \({{x}_{2}}={{{\hat{x}}}_{2}}+{{e}_{2}}\), we have
Consider Lyapunov function candidate as follows
where \({{\gamma }_{1}}>0\) is a given positive constant.
From (27), \({{\dot{V}}_{1}}\) is
Remark 5
Note that since \(W _{1}^{*T}{{\Phi }_{1}}({\hat{x}}) \) in (27) includes the whole state variables of the system (5), if we apply traditional backstepping control design methods [15, 16] to design virtual control signal \({{\alpha }_{1}}\), then \({{\alpha }_{1}}\) will be a function of the entire state vector \(x=[{{x}_{1}},\ldots , {{x}_{4}}]\), which is not permitted by backstepping control design technique [18, 19]. In the following control design, we will use the property of fuzzy logic system to solve this problem.
By using Young’s inequality and \(0<W _{1}^{T}(x){{W }_{1}}(x)<1\), we have
where \(\tau \) is a given positive constant.
Inserting (30)–(31) into (29) obtains
where \({{M}_{1}}=\frac{2}{\tau }{{\left\| W _{1}^{*} \right\| }^{2}}+\frac{1}{2}{\bar{\varepsilon }}_{1}^{2}\).
Construct the virtual controller \({{\alpha }_{1}}\). the updating law of \({{{\hat{W}}}_{1}}\) as
where \(p=\frac{2n-1}{2n+1}(n>2,n\in N)\), \({{c}_{1}}>0\) and \({{\sigma }_{1}}>0\) are given constants.
Substituting (33)–(34) into (32) obtains
Step 2: According (20) and (25), \({{\dot{z}}_{2}}\) is
Construct the Lyapunov function as follows:
where \({{\gamma }_{2}}\) is a given positive constant.
From (36), we have \({{\dot{V}}_{2}}\) as follows
By using the similar design procedures to step 1, the following inequalities hold
Substituting (39)–(40) into (38) yields
where \({{M}_{2}}={{M}_{1}}+\frac{2}{\tau }{{\left\| W _{2}^{*} \right\| }^{2}}\), and \({{B}_{2}}\) is a continuous function as follow
\({{B}_{2}}={{c}_{1}}\frac{\partial (z_{1}^{2p-1}/\psi )}{\partial t}+\dot{{\hat{W}}}_{1}^{T}{{\Phi }_{1}}+\frac{{\hat{W}}_{1}^{T}\partial {{\Phi }_{1}}}{\partial {{{{\hat{x}}}}_{1}}}{{\dot{{\hat{x}}}}_{1}}+\frac{4-\tau }{2}({{\dot{z}}_{1}}\psi +{{z}_{1}}\dot{\psi })-{{\ddot{y}}_{2}}-{{c}_{1}}\frac{\partial ({{\chi }_{1}}\dot{\mu }/\mu )}{\partial t}\).
Construct the virtual controller \({{\alpha }_{2}}\) , the updating law of \({{{\hat{W}}}_{2}}\) as
where \({{c}_{2}}\) and \({{\sigma }_{2}}\) are given positive constants. Inserting (42)–(43) into (41) yields
Step 3: According to (25), the time derivative of \({{z}_{3}}\) is
Construct the Lyapunov function as follows:
where \({{\gamma }_{3}>0}\) is a given constant.
From (45), \({{\dot{V}}_{3}}\) is
where \({{M}_{3}}={{M}_{2}}+\frac{2}{\tau }{{\left\| W _{3}^{*} \right\| }^{2}}\);
\({{B}_{3}}=(2p-1){{c}_{2}}z_{2}^{2p-2}+{{k}_{2}}{{\dot{e}}_{1}}+\frac{5+\tau }{2}{{\dot{z}}_{2}}+\dot{{\hat{W}}}_{2}^{T}{{\Phi }_{2}}({{\hat{{\bar{x}}}}_{2}})+\frac{{\hat{W}}_{2}^{T}\partial {{\Phi }_{2}}}{\partial {{{\hat{{\bar{x}}}}}_{2}}}{{\dot{\hat{{\bar{x}}}}}_{2}}+\frac{{{{\dot{s}}}_{3}}}{{{\kappa }_{3}}}\).
Construct the virtual controller \({{\alpha }_{3}}\) , the updating law of \({{{\hat{W}}}_{3}}\) as
where \({{c}_{3}}\) and \({{\sigma }_{3}}\) are given positive constants. Inserting (48)–(49) into (47) yields
Step 4: According to (25), we can obtain
with \({{r}^{*}}=u_{k}^{*}\).
Construct the Lyapunov function as follows:
where \({{\gamma }_{4}}\), \({{\gamma }_{\varpi }}\) and \({{\gamma }_{r}}\) are given positive constants. \({\hat{\varpi }}\) is estimate of \({{\varpi }^{*}}=1/{\bar{\eta }}\), and \(\tilde{\varpi }={{\varpi }^{*}}-{\hat{\varpi }}\). \({\hat{r}}\) is estimate of \({{r}^{*}}\), and \({\tilde{r}}={{r}^{*}}-{\hat{r}}\).
From (51), we have
where \({{B}_{4}}=(2p-1){{c}_{3}}z_{3}^{2p-2}+{{k}_{3}}{{\dot{e}}_{1}}+\frac{5+\tau }{2}{{\dot{z}}_{3}}+\dot{{\hat{W}}}_{3}^{T}{{\Phi }_{3}}({{\hat{{\bar{x}}}}_{3}})+\frac{{\hat{W}}_{3}^{T}\partial {{\Phi }_{3}}}{\partial {{{\hat{{\bar{x}}}}}_{3}}}{{\dot{\hat{{\bar{x}}}}}_{3}}+\frac{{{{\dot{s}}}_{4}}}{{{\kappa }_{4}}}\).
Construct the virtual controller \({{\alpha }_{4}}\), the updating law of \({{{\hat{W}}}_{4}}\) as follows
where \({{c}_{4}}\) and \({{\sigma }_{4}}\) are given positive constants.
Inserting (54)–(55) into (53) yields
Design the controller \({{u}_{m}}\),, the updating laws of \({\hat{\varpi }}\) and \({\hat{r}}\) as
where \({{\sigma }_{\varpi }}>0\) and \({{\sigma }_{r}}>0\) are design parameters.
By using (57), we obtain
Then, one obtains
The above control algorithm configuration is shown in Fig. 3.

Structure diagram of SBWV system
4 Stability analysis
This section will analyze and prove the properties that the designed output feedback prescribed performance fuzzy FTC method has properties of the following theorem.
Theorem 1
For the steer-by-wire vehicle system (5), with the Assumption 1 and 2, the fuzzy state observer (20), the virtual controllers (33), (42), (48), (54), the controller (57), and the parameter updating laws (34), (43), (55), (58), (59), the following properties are guaranteed.
-
1.
The controlled steer-by-wire vehicle system is SGPFS.
-
2.
The tracking error converges to a small neighborhood of zero in a finite-time interval and does not exceed the prescribed performance bound.
Proof
Take the whole Lyapunov function as
From (24) and (61), the time derivative of V is
where \({{\lambda }_{1}}={{\lambda }_{0}}-\frac{1}{2}\) and \({{M}_{4}}={{M}_{0}}+{{M}_{3}}\).
From [25], we define the set \({\mathbb {Z}}=\{{{e}^{T}}Pe+\frac{1}{2}\sum \nolimits _{i=1}^{4}{(z_{i}^{2}+\frac{1}{{{\gamma }_{i}}}{\tilde{W}}_{i}^{T}{{{{\tilde{W}}}}_{i}})}+\frac{1}{2}\sum \nolimits _{i=2}^{4}{s_{i}^{2}}+\frac{{{\bar{\eta }}}}{2{{\gamma }_{\varpi }}}{{\tilde{\varpi }}^{2}}+\frac{1}{2{{\gamma }_{r}}}{{{\tilde{r}}}^{2}}\le \delta \}\), where \(\delta >0\) is a constant , which satisfies that \(V(0)\le \delta \). Since \({\mathbb {Z}}\) is a compact in \({{R}^{17}}\) with 17 denoting the dimension of \({\mathbb {Z}}\), function \({{B}_{i}}\) is continuous on \({\mathbb {Z}}\), we have \({{{\bar{B}}}_{i}}\ge \left\| {{B}_{i}} \right\| \). where \({{{\bar{B}}}_{i}}\) is constant.
By using Youngs inequality, we have
Substituting (64)–(67) into (63) yields
where \(M=\sum \nolimits _{i=1}^{4}{\frac{{{\sigma }_{i}}}{2{{\gamma }_{i}}}W _{i}^{*T}W _{i}^{*}}+\sum \nolimits _{i=2}^{4}{\frac{1}{2}{\bar{B}}_{i}^{2}}+\frac{{{\sigma }_{\varpi }}{\bar{\eta }}}{2{{\gamma }_{\varpi }}}\tilde{\varpi }+\frac{{{\sigma }_{r}}}{2{{\gamma }_{r}}}{{{\tilde{r}}}^{2}}+{{M}_{4}}\).
Choose \({{{\bar{c}}}_{j}}=\min \{{{\sigma }_{1}}-2{{\left\| P \right\| }^{2}}{{\gamma }_{1}},{{\sigma }_{i}}-{{\gamma }_{i}}(2{{\left\| P \right\| }^{2}}+1),\frac{1}{{{\kappa }_{i}}}-1,{{\sigma }_{\varpi }},{{\sigma }_{r}}\}\), \(j=1,\ldots ,4\). Then, (68) can be rewritten as
By using the following inequality
and selecting \(x=1\), \(\iota =1-p\), and \(\varsigma ={{p}^{p/(1-p)}}\), we can obtain the following inequalities
Substituting (71)–(75) into (70), one has
where \(D={{M}_{4}}+5(1-p)\varsigma \).
Then, choose \(C=\min \left\{ \frac{{{\lambda }_{1}}}{{{\lambda }_{\min }}(Q)},{{2}^{p}}{{c}_{i}},{{{{\bar{c}}}}_{j}},{{2}^{p}}{{{{\bar{c}}}}_{j}} \right\} \), (76) can be rewritten as
From the proof in [20], for \(\forall 0<\Upsilon <1\), we obtain the reaching time as follows:
In (78), \(z(0)={{\left[ {{z}_{1}}(0),\ldots ,{{z}_{4}}(0) \right] }^{T}}\), and \({\tilde{W}}(0)={{\left[ {{{{\tilde{W}}}}_{1}}(0),\ldots ,{{{{\tilde{W}}}}_{4}}(0) \right] }^{T}}\). By the definition of \(V(\aleph )\le (\aleph =[z,{\tilde{W}}\text {, }\tilde{\varpi }])\), we can obtain \(\left\| \aleph \right\| \le \sqrt{2{{(\frac{D}{(1-\Upsilon )C})}^{1/p}}}\), then we have the closed-loop system is SGPFS. Combining \(\mu (t)=({{\mu }_{0}}-{{\mu }_{\infty }}){{e}^{-ct}}+{{\mu }_{\infty }}\) with \(-{{\rho }_{\min }}\mu (t)<\chi (t)<{{\rho }_{\max }}\mu (t)\), we can obtain \(\chi (t)\le \max \{{{\rho }_{\min }}{{\mu }_{0}},{{\rho }_{\max }}{{\mu }_{0}}\}\).
Therefore, from the previous discussion, the following guideline for the controller design and parameter selection is given as
Step 1: Define the fuzzy IF-THEN rules and membership functions [24], and determine the fuzzy basis functions, and then the FLSs.
Step 2: Specify vector \(K={{\left[ {{k}_{1}},{{k}_{2}},{{k}_{3}},{{k}_{4}} \right] }^{T}}\), such that A is a strict Hurwitz matrix.
Step 3: Specify a positive definite matrix Q and by solving the Lyapunov Eq. (22), a positive definite matrix P is obtained.
Step 4: The design parameter \({{\kappa }_{i}}\) in nonlinear filter (26) is chosen as \({{\kappa }_{i}}>0\).
Step 5: Select the design parameters \(0<p<1\) and design virtual controllers (33), (42), (48) (54) and actual controller (57).
Step 6: Select the design parameters \({{\gamma }_{i}}\) and design adaptive laws (34), (43), (49), (55), (58), (59).
Remark 6
From (78), we know that the tracking error \(\vert {y - {y_d}}\vert \) and the settling time \({{T}_{r}}\) depend on the parameters p, C andD. However, from the definitions of C and D in (69), (76) and (77), we know that by increasing the design parameters \({{\gamma }_{i}}\), \({{c}_{i}}\), \({{\lambda }_{\min }}(Q)\) or decreasing the design parameters \({{\sigma }_{i}}\) and p makes \({{T}_{r}}\), tracking error \(\vert {y - {y_d}}\vert \) can be made to be smaller. Notice that smaller tracking errors would result in higher control energy. Therefore, in practice, there should be a tradeoff between improved tracking performance and control energy.
5 Simulation studies
In this section, we check the effectiveness of the presented fuzzy finite-time control method via computer simulation. The parameter selections of SBWV system (5) are shown by Table 1 [9, 12].
The reference function and the external disturbance are chosen as \({{y}_{d}}=0.4\sin 0.4t\), \(d(t)=5\sin 0.5t\).
The prescribed performance function is defined as follows:
\(\mu (t)=(0.3-0.01){{e}^{-0.5t}}+0.01\)
The intermittent actuator fault model is defined as follows:
\(u(t)=\eta (t){{u}_{m}}(t)+{{u}_{k}}(t)\)
where \(\eta (t)=0.8\), \({{u}_{k}}(t)=5\) and \(t\in [k{{T}^{*}},\text { (}k+1){{T}^{*}})\), \(k=1,3,5,\ldots \), \({{T}^{*}}=5\,s\).
We design five If-Then fuzzy rules:
\({{\Re }^{l}}\): if \({{x}_{1}}\) is \(G_{1}^{l}\) and \({{x}_{2}}\) is \(G_{2}^{l}\) and \({{x}_{3}}\) is \(G_{3}^{l}\) and \({{x}_{4}}\) is \(G_{4}^{l}\), then y is \({{H}^{q}}\), \(q=1,2,\cdots ,5\).
where the fuzzy membership functions of \(G_{i}^{q}\), \(i=1,2,3,4\) are chosen as \({{\mu }_{G_{i}^{1}}}({{x}_{i}})={{{\text {e}}}^{(-{{({{x}_{i}}-2)}^{2}}/5)}}\), \({{\mu }_{G_{i}^{2}}}({{x}_{i}})={{{\text {e}}}^{(-{{({{x}_{i}}-1)}^{2}}/5)}}\), \({{\mu }_{G_{i}^{3}}}({{x}_{i}})={{e}^{(-{{({{x}_{i}})}^{2}}/5)}}\), \({{\mu }_{G_{i}^{4}}}({{x}_{i}})={{{\text {e}}}^{(-{{({{x}_{i}}+1)}^{2}}/5)}}\), \({{\mu }_{G_{i}^{5}}}({{x}_{i}})={{{\text {e}}}^{(-{{({{x}_{i}}+2)}^{2}}/5)}}\).
According to [24], we construct FLSs \({{{\hat{f}}}_i}(x\vert {{{\hat{W}}} _i}) = {{\hat{W}}} _i^T{\Phi _i}(x)\), \(\left( i=1,\ldots ,4 \right) \) to approximate \({{f}_{i}}(x) \) in system (5).
The observer gain vector (20) is designed as \(K={{\left[ {{k}_{1}},{{k}_{2}},{{k}_{3}},{{k}_{4}} \right] }^{T}}={{\left[ 10,160,160,500 \right] }^{T}}\), then A is a Hurwitz matrix. For given a definite matrix \(Q=7I\), by solving Lyapunov equation \({{A}^{T}}P+PA=-7I\), we obtain
\(P=\left[ \begin{array}{*{35}{l}} 0.4030 &{} 0.5302 &{} 1.6858 &{} 0.0070 \\ 0.5302 &{} 68.0998 &{} 81.3344 &{} 201.5808 \\ 1.6858 &{} 81.3344 &{} 36.1595 &{} 266.2275 \\ 0.0070 &{} 201.5808 &{} 266.2275 &{} 844.0186 \\ \end{array} \right] \)
In this simulation, the all design parameters in filters, virtual controller \({{\alpha }_{i}}\), real controller \({{u}_{m}}\) and parameter updating laws \({{\dot{{\hat{W}}}}_{i}},\dot{{\hat{\varpi }}},\dot{{\hat{r}}}\) are chosen as \({{\kappa }_{i}}=0.1\), \(p=0.95\), \(\tau =1\), \({{c}_{1}}=100\), \({{c}_{2}}=50\), \({{c}_{3}}=60\), \({{c}_{4}}=70\), \({{\gamma }_{i}}=1\), \({{\sigma }_{i}}=1\).
The initial condition of variables and adaptive parameters of the controlled system are selected as \({{x}_{1}}(0)=0.1\), \({{x}_{i}}(0)=0\), \({{{\hat{x}}}_{i}}(0)=0\) and \({{{\hat{W}}}_{i}}(0)=0\). The simulation results are shown in Figs. 4, 5, 6, 7, 8, 9, 10. Figure 4 shows the responses of tracking error and performance bounds. Figures 5, 6, 7, 8 show the trajectories of steering angle, the vehicle sideslip angle, the yaw rate, and angular acceleration and their estimates. Figure 9 shows the trajectories of the control input \({{u}_{m}}\).

The tracking error and performance bounds

The trajectories of the \({{x}_{1}}\)

The trajectories of the \({{x}_{2}}\)

The trajectories of the \({{x}_{3}}\)

The trajectories of the \({{x}_{4}}\)

The trajectory of controller \({{u}_{m}}\)
From Figs. 4, 5, 6, 7, 8, 9, it can be concluded that the proposed control scheme can ensure that the steer-by-wire vehicle system (5) is SGPFS, and the steering angle can track the expected trajectory within a finite-time interval and does not exceed the prescribed performance bound, while the vehicle always maintains a stable driving state.
Further, to demonstrate the robustness against actuator failures of the proposed control method, we make a simulation comparison with fuzzy control without fault-tolerant technology. In the simulation, \({{x}_{i}}(0)\), \({{{\hat{x}}}_{i}}(0)\) and \({{{\hat{W}}}_{i}}(0)\) are selected those in the above simulation. The simulation results are shown in Figs. 10 and 11 that in the presence of intermittent actuator faults, the stability of the controlled system cannot be guaranteed.

The trajectory of steering angle

The trajectory of controller \({{u}_{m}}\)
Remark 7
Furthermore, to illustrate this study can reduce the computational complexity problem, we compare with the adaptive fuzzy control method without using DSC technology in control design. We set the simulation time to 30, 50, 100 s, respectively. Then the corresponding program execution times are shown in Table 2. From Table 2, we see clearly that the proposed adaptive fuzzy DSC control approach in this paper uses much less program execution time to achieve stability than the adaptive control method without DSC technology.
6 Conclusion
This paper has investigated the problem of output-feedback fuzzy adaptive finite-time prescribed performance FTC design for the steer-by-wire vehicle system with immeasurable states and intermittent actuator faults. FLSs are used to model the uncertain SBWV system and a fuzzy state observer is formulated to estimate the immeasurable states. By adopting the adaptive backstepping control design technique, a finite-time adaptive fuzzy prescribed performance output feedback FTC approach has been developed. Based on Lyapunov theory of finite-time stability, the stability analysis has been provided. The main advantages of the presented control scheme can ensure that the controlled steer-by-wire vehicle system is SGPFS. Furthermore, it can make the tracking and observer errors converge to a small neighborhood of zero in a finite-time interval and does not violate the prescribed performance bounded. Finally, the computer simulation results and comparisons with the previous control method have demonstrated the effectiveness of the presented control approach.The further study direction will focus on the performance optimization for SBWV system based on this study.
Data availibility
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.
References
Gao HJ, Li ZK, Yu XH, Qiu JB (2022) Hierarchical multiobjective heuristic for PCB assembly optimization in a beam-head surface mounter. IEEE Trans Cybern 52(7):6911–6924
Zhuang SL, Li DX, Yu XH, Tong MS, Lin WY, Rodriguez-Andina JJ, Shi Y, Gao HJ (2023) Microinjection in biomedical applications: an effortless autonomous omnidirectional microinjection system. IEEE Ind Electron Mag. https://doi.org/10.1109/MIE.2023.3318831
Ji XW, He XK, Lv C, Liu YH, Wu J (2018) Adaptive-neural-network-based robust lateral motion control for autonomous vehicle at driving limits. Control Eng Pract 76:41–53
Marino R, Scalzi S, Netto M (2011) Nested PID steering control for lane keeping in autonomous vehicles. Control Eng Pract 19(12):1459–1467
Huang XY, Zhang H, Zhang GG, Wang JM (2014) Robust weighted gain-scheduling \(H\infty \) vehicle lateral motion control with considerations of steering system backlash-type hysteresis. IEEE Trans Control Syst Technol 22(5):1740–1753
Huang C, Naghdy F, Du HP (2019) Sliding mode predictive tracking control for uncertain steer-by-wire system. Control Eng Pract 85:194–205
Sun Z, Zheng JC, Man ZH, Fu MY, Lu RQ (2019) Nested adaptive super-twisting sliding mode control design for a vehicle steer-by-wire system. Mech Syst Signal Process 122:658–672
Wang YL, Wang YF (2021) Discrete-time adaptive neural network control for steer-by-wire systems with disturbance observer. Expert Syst Appl 183:115395
Wang YL, Wang YF, Tie M (2021) Hybrid adaptive learning neural network control for steer-by-wire systems via sigmoid tracking differentiator and disturbance observer. Eng Appl Artif Intell 104:104393
Wei LT, Wang XY, Li L, Fan ZX, Dou RZ, Lin JG (2021) T-S fuzzy model predictive control for vehicle yaw stability in nonlinear region. IEEE Trans Veh Technol 70(8):7536–7546
Huang C, Naghdy F, Du HP (2017) Fault tolerant sliding mode predictive control for uncertain steer-by-wire system. IEEE Trans Cybern 49(1):261–272
Chen H, Tu YD, Wang H, Shi KB, He SP (2022) Fault-tolerant tracking control based on reinforcement learning with application to a steer-by-wire system. J Franklin Inst 359(3):1152–1171
Lai GY, Wen CY, Liu Z, Zhang Y, Chen CLP, Xie SL (2018) Adaptive compensation for infinite number of actuator failures based on tuning function approach. Automatica 87:365–374
Wu W, Li YM, Tong SC (2023) Neural network output-feedback consensus fault-tolerant control for nonlinear multiagent systems with intermittent actuator faults. IEEE Trans Neural Netw Learn Syst 34(8):4728–4740
Huang C, Naghdy F, Du HP (2018) Observer-based fault-tolerant controller for uncertain steer-by-wire systems using the delta operator. IEEE/ASME Trans Mechatron 23(6):2587–2598
Luo G, Wang ZZ, Ma BX, Wang YF, Xu JF (2021) Observer-based interval type-2 fuzzy friction modeling and compensation control for steer-by-wire system. Neural Comput Appl 33:10429–10448
Zhao J, Yang KH, Cao YC, Liang ZC, Li WF, Xie ZC, Wong PK (2023) Observer-based discrete-time cascaded control for lateral stabilization of steer-by-wire vehicles with uncertainties and disturbances. IEEE Trans Circ Syst I Regul Pap. https://doi.org/10.1109/TCSI.2023.3276945
Zhang J, Tong SC, Li YM (2022) Adaptive fuzzy finite-time output-feedback fault-tolerant control of nonstrict-feedback systems against actuator faults. IEEE Trans Syst Man Cybern Syst 52(2):1276–1287
Li YM, Li KW, Tong SC (2019) Finite-time adaptive fuzzy output feedback dynamic surface control for MIMO nonstrict feedback systems. IEEE Trans Fuzzy Syst 27(1):96–110
Zhou HD, Sui S, Tong CS (2023) Finite-time adaptive fuzzy prescribed performance formation control for high-order nonlinear multiagent systems based on event-triggered mechanism. IEEE Trans Fuzzy Syst 31(4):1229–1239
Li YM, Shao XF, Tong SC (2020) Adaptive fuzzy prescribed performance control of nontriangular structure nonlinear systems. IEEE Trans Fuzzy Syst 28(10):2416–2426
Iqbal J, Zuhaib KM, Han C, Khan AM, Ali MA (2017) Adaptive global fast sliding mode control for steer-by-wire system road vehicles. Appl Sci 7(7):738
Yu M, Wang ZC, Wang H, Jiang WH, Zhu RS (2023) Intermittent fault diagnosis and prognosis for steer-by-wire system using composite degradation model. IEEE J Emerg Select Top Circ Syst 13(2):557–571
Wang L-X (1993) Stable adaptive fuzzy control of nonlinear systems. IEEE Trans Fuzzy Syst 1(2):146–155
Swaroop D, Hedrick JK, Yip PP, Gerdes JC (2000) Dynamic surface control for a class of nonlinear systems. IEEE Trans Autom Control 45(10):1893–1899
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declared that they have no conflicts of interest to this work.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Zhou, S., Li, Y. & Tong, S. Prescribed performance adaptive fuzzy output feedback control for steer-by-wire vehicle system with intermittent actuator faults. Neural Comput & Applic 36, 16057–16070 (2024). https://doi.org/10.1007/s00521-024-09797-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-024-09797-6