
Abstract
One of the most widely referenced Swarm Intelligence (SI) algorithms is the Grey Wolf Optimizer (GWO), which is based on the pack hunting and natural leadership organization of grey wolves. The GWO algorithm offers several significant benefits, including simple implementation, rapid convergence, and superior convergence outcomes, leading to its effective application in diverse fields for solving optimization issues. Consequently, the GWO has rapidly garnered substantial research interest and a broad audience across numerous areas. To better understand the literature on this algorithm, this review paper aims to consolidate and summarize research publications that utilized the GWO. The paper begins with a concise introduction to the GWO, providing insight into its natural establishment and conceptual framework for optimization. It then lays out the theoretical foundation and key procedures involved in the GWO, following which it comprehensively examines the most recent iterations of the algorithm and categorizes them into parallel, modified, and hybridized variations. Subsequently, the primary applications of the GWO are thoroughly explored, spanning various fields such as computer science, engineering, energy, physics and astronomy, materials science, environmental science, and chemical engineering, among others. This review paper concludes by summarizing the key arguments in favour of GWO and outlining potential lines of inquiry in the future research.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Meta-heuristic optimization techniques have proven to be successful in solving complex problems that arise in real-world settings. The growing popularity of these techniques can be attributed to several factors. Notably, by beginning with solutions that are generated at random without necessitating the calculation of search space derivation, their derivation process is free of specific mechanisms [1, 2] Additionally, meta-heuristic algorithms’ key characteristic is exploration [3, 4], which aids in avoiding local optima [2]. These algorithms are also fairly straightforward in terms of their realistic or natural properties, drawing inspiration from natural phenomena, animal behaviours, and physical events [2]. Importantly, these methods do not alter the algorithm’s structure (which is independent of the problem), making them adaptable and easily applicable to a wide range of real-world problems. Researchers need only determine the inputs and outputs specific to a given problem. This inherent adaptability contributes significantly to the appeal of these algorithms.
Meta-heuristic algorithms are categorized into two subtypes based on their approach to solution space: single-solution heuristics (e.g. Simulated Annealing [5, 6]) and multiple-solution heuristics (e.g. Genetic Algorithm [7, 8], Particle Swarm Optimization [9], Harmony Search [10, 11], etc.). To prevent being trapped in local optima, multiple-solution heuristics are preferred to single-solution heuristics, as the former can gather information on vast search areas [2] and concurrently facilitate multiple solutions in reaching critical areas of the state space.
Three fundamental ideas—evolution, physics, and swarm intelligence—serve as the foundation for most meta-heuristic algorithms. The main source of inspiration for evolutionary algorithms is natural evolution. Well-known evolutionary algorithms include the Genetic Algorithm (GA [7, 8], Biogeography-Based Optimization (BBO) [12], Genetic Programming [13], and Differential Evolution (DE) [14, 15]. Physics-based algorithms, on the other hand, emulate natural phenomena and include examples like the Gravitational Search Algorithm (GSA) [16], Charged System Search (CSS) [17], Black Hole (BH) [18], and Ray Optimization [19]. Lastly, swarm intelligence (SI) is one of the most popular and hotly debated subcategories of natural algorithms. Grounded in the social intelligence and collective behaviours of wild animals, several SI-based meta-heuristics have emerged in recent years, such as Particle Swarm Optimization (PSO) [20], Ant Colony Optimization (ACO) [21], the Artificial Bee Colony (ABC) [22], the Whale Optimization Algorithm (WOA) [23], the Dragonfly Algorithm (DA) [24], and the Firefly Algorithm (FA) [25].
A recent SI algorithm that has garnered significant academic attention across various optimization domains is the Grey Wolf Optimizer (GWO) [2], introduced by Mirjalili et al. in 2014. A substantial body of research literature has evolved based on this algorithm, as depicted in Fig. 1, which illustrates all papers related to the GWO up until 2022. The GWO stands out from its predecessors in several ways. Specifically, it features a minimal number of adjustable parameters, facilitating a swift balance between exploration and exploitation and enabling positive convergence [26].

Papers related to GWO
The GWO algorithm is largely influenced by the social structure and hierarchical organization observed in wolf packs in nature, comprising four distinct wolf levels: alpha, beta, delta, and omega. During their pursuit of prey, all wolves follow the lead of the top three wolves to locate their target. Empirical studies consistently attest to the superior performance of the GWO, making it a valuable tool in various applications. Notably, it has been utilized in resource allocation [27], stock selection [28], COVID prediction [29], and many more areas.
The primary objective of this review is to conduct a comprehensive analysis of recent developments in the GWO algorithm and its diverse applications within the academic community. The review encompasses all relevant publications from 2018 to 2023 available in the Scopus database, as depicted by year in Fig. 2. Figure 3 provides an overview of the distribution of GWO publications across various subject categories, whereas Fig. 4 is a knowledge map of the top 100 most relevant papers on the GWO. Each circle within this map represents a distinct research topic, whereby the quantity of the circles indicates the prevalence and current status of the GWO literature. This review also includes an exploration of the advantages of the GWO algorithm and improvements proposed in the existing literature to address its shortcomings. Notably, as shown in Fig. 5, this article discusses key facets of the GWO:
-
(1)
GWO variants, which include the modified GWO, hybridized GWO, parallelism, and multi-objective GWO. The modified GWO encompasses enhancements in mechanisms, operators, and population hierarchy and structure.
-
(2)
GWO applications, such as in the areas of machine learning, engineering, wireless sensor networks, environmental modelling, medicine and bioinformatics, and image processing.

Percentage of GWO Publications from 2018 to 2023

GWO publication count by subject category

Knowledge Map of the GWO

Classification of the GWO algorithm
This review paper is organized as follows: Sect. 2 provides a general history of the GWO and its development; Sect. 3 discusses the variations of the GWO and its improvements; Sect. 4 identifies and describes the GWO’s practical applications; Sect. 5 details the examination and evaluation of the GWO; and Sect. 6 concludes the paper by suggesting potential directions for future research on GWO.
2 The grey wolf optimizer (GWO)
The GWO formula is presented in this section, along with a breakdown of its essential components. The origins, applications, and convergence of this algorithm are also discussed.
2.1 Inspiration behind the GWO
The grey wolf, a member of the canid family (Canis lupus), is considered an apex predator as it stands at the top of the food chain. Grey wolves typically live in packs of five to 12, displaying high social awareness in terms of hunting and leadership. The fairly rigid social hierarchy of the wolf pack, depicted in Fig. 6, served as the source of inspiration for the GWO algorithm.

The social structure of grey wolves
The male or female wolf that leads the pack is known as the alpha. The alpha is generally responsible for taking decisions on hunting, where to sleep, when to get up, and so on. Although the alpha is the best at leading the pack, it is not always the most physically powerful member. This shows that a pack’s organization and discipline are significantly more important than its physical strength.
The second position in the hierarchy of grey wolves is called beta, held by the alpha’s subordinates. Beta wolves obey the alpha and support it in decision-making, pack duties, and commanding lower level wolves. They also offer advice to the alpha and reaffirm the alpha’s directives to the rest of the pack. Betas thus act as the alpha’s counsellors and the pack’s enforcers of discipline.
Next, wolves that submit to the alpha and beta wolves, but dominate the lowest-level wolves, are called deltas. Scouts, sentinels, seniors, hunters, and carers fall within this category.
The grey wolf with the lowest ranking is the omega, the scapegoat of the pack. Omega wolves must give way to all other dominant wolves, and are only allowed to eat last. The babysitters in the pack are sometimes the omegas.
Apart from their social order, group hunting is another fascinating aspect of grey wolves’ social behaviour. The main phases of grey wolf hunting are as follows [30]:
-
(a)
Locating the prey, gaining ground on it, and stalking it.
-
(b)
Chasing, encircling, and harassing the prey until it comes to a stop.
-
(c)
Attacking the prey.
2.2 Mathematical models of the GWO
For the purpose of creating the GWO, the grey wolf hunting strategy (see Fig. 7) is quantified in this section.

The grey wolf hunting strategy a Locating the prey b Encircling the prey c Attacking the prey
2.2.1 Encirclement
When hunting, grey wolves encircle their prey, as previously indicated. To quantitatively model the encircling behaviour of grey wolves, the following equations are suggested:
where \(i\) stands for the current iteration, \(\overrightarrow{A}\) and \(\overrightarrow{C}\) are coefficient vectors, \({\overrightarrow{X}}_{p}\) is the position vector of the prey, and \(\overrightarrow{X}\) stands for a grey wolf’s position vector.
Calculations for the vectors \(\overrightarrow{A}\) and \(\overrightarrow{C}\) are as follows:
where components of \(\overrightarrow{a}\) drop linearly over iterations from 2 to 0 and \({r}_{1}\), \({r}_{2}\) are random vectors in [0,1]. The following equation should be used to update the parameter \(a\):
where \(i\) represents the most recent iteration and \(I\) is the total number of iterations.
A two-dimensional position vector and several potential neighbours are shown in Fig. 8 to demonstrate the implications of Eqs. (1) and (2). A grey wolf in the position X(i) can update its location in accordance with the location of the prey, Xp. By changing the values of the \(\overrightarrow{A}\) and \(\overrightarrow{C}\) vectors, other locations surrounding the best agent can be identified with respect to the current location. It should be noted that wolves can reach any place between the points shown in Fig. 8 as a result of the random vectors \(\overrightarrow{{r}_{1}}\) and \(\overrightarrow{{r}_{2}}\). A grey wolf can therefore use Eqs. (1) and (2) to update its position inside the area surrounding the prey at any location.

2D position vectors and potential future locations
2.2.2 Hunting
Grey wolves have the capacity to locate their prey and hunt them down. Typically, the alpha leads the hunt, though hunting may occasionally be done by the beta and delta wolves. In a generalized search environment, the optimal prey is unclear. To mathematically mimic the hunting behaviour of grey wolves, it is assumed that the beta, delta, and alpha wolves have more knowledge about the likely location of the prey. Therefore, the search results of wolves in the top three rank are always used. All other search agents, including the omegas, are directed to realign themselves to match the top agents’ prey placements. The formulas listed below are recommended in this regard.
Figure 9 illustrates how a search agent changes its position in response to the alpha, betas, and deltas in a 2D search space. As can be seen in the figure, the final position within a circle is randomly determined by the locations of alpha, beta, and delta agents in the search space. Thus, alpha, betas, and deltas determine where the prey is while the other wolves arbitrarily update their positions around it.

Position updating in the GWO
2.3 The GWO’s exploration and exploitation
2.3.1 Exploitation (hunting the prey)
Grey wolves attack their prey when it stops moving, thus ending the hunt. To imitate the analytical approach towards the prey, the value of \(a\) is reduced, which, as should be noted, decreases \(\overrightarrow{A}\) ‘s fluctuation range as well. Specifically, \(a\) drops from 2 to 0 during the period of iterations, decreasing at random within the range [\(-2a\), \(2a\)]. When the random values of \(\overrightarrow{A}\) fall between [− 1, 1] ,the future position of a search agent can be anywhere between [− 1, 1] and the prey’s position. Figure 10 shows how the wolves are forced to charge the prey when \(\left|A\right|<1\).

Attacking prey and searching for prey
The alpha, beta, and delta locations can now be used by the GWO algorithm’s search agents to update their positions. Consequently, they can launch an attack in the direction of the prey by employing the suggested operators. However, the GWO method is susceptible to local solution stagnation when used with these operators. While the proposed encircling mechanism does, to some extent, demonstrate exploration, the GWO requires more operators to emphasize exploration.
2.3.2 Exploration (searching prey)
To direct their search, grey wolves mainly employ the alpha, beta, and delta positions. They split up to search for prey, then come back together to attack it. To mathematically imitate this divergence, \(\overrightarrow{A}\) with random values more than 1 or less than −1 can be employed to drive the search agent to diverge from the prey. This promotes exploration and makes it possible to apply the GWO method globally. Figure 10 demonstrates how \(\left|A\right|>1\) causes the grey wolves to stray from their victim in an effort to locate fitter prey.
Another aspect of the GWO that stimulates inquiry is the \(\overrightarrow{C}\) vector, which has random values [0,2] as shown in Eq. 4. This component provides random weights for the prey to stochastically emphasize (\(C>1\)) or deemphasize (\(C<1\)) the role of the prey in influencing the distance in Eq. 1. Thus, it is possible for the GWO to act more randomly in optimization, favouring exploration and exploitation while avoiding the local optima trap. The decline in \(C\) is not linear, which is an essential distinction from \(A\). This requires \(C\) to always supply random values to prioritize exploration throughout both early and final iterations. This element is helpful in situations of local optima stagnation, especially in final iterations.
Alternatively, the \(C\) vector can be considered as the outcome of natural obstacles in the way of approaching prey. The obstructions in nature that wolves typically run against on their hunting routes seriously impede their capacity to reach their prey quickly and efficiently. Overcoming these obstacles is what the vector \(C\) does. The weight of a wolf’s prey can be arbitrarily assigned by the wolf, making it harder and farther away for the wolf to get there.
Finally, to start the search, a random grey wolf population is produced via the GWO algorithm. The potential position of the prey is calculated by the alpha, beta, and delta wolves across a number of iterations. Each possible response alters the prey’s distance from it. The value of \(a\) is decreased from 2 to 0, highlighting exploration and exploitation. When \(\left|A\right|>1\) and \(\left|A\right|<1\), agent solutions frequently diverge from the prey. When an end criterion is satisfied, the GWO algorithm is finally completed.
2.4 Illustrative example
The convergence behaviour of the GWO is examined in this subsection. Berg et al. [31] asserted that during the earliest stages of optimization, search agents’ movements ought to change dramatically. This dynamic behaviour allows a meta-heuristic algorithm to thoroughly explore the entire search space. To emphasize exploitation towards the conclusion of the optimization process, these changes in agent movements should be minimized. Figure 11 visually presents the search history and trajectory of the initial search agent along its first dimension, offering insights into the convergence behaviour of the GWO algorithm. For animated versions of this figure, please refer to the Supplementary Materials.

The initial particle’s first-dimensional search history and trajectory
In this section, the benchmark functions were adjusted and the optimization process was conducted using six search agents. The search history of these search agents is illustrated in the second column of Fig. 11. Notably, the GWO search agents frequently traverse potential regions within the search space, intelligently selecting the most promising ones. Furthermore, the trajectory of the first particle is depicted in the fourth column of Fig. 11, highlighting changes in the first dimension of the initial search agent. It is evident that there are substantial variations in the early iterations, but these changes gradually diminish as the iterations progress. According to Berg et al. [31] this characteristic ensures that an SI algorithm eventually converges on a particular location in the search space.
In conclusion, the results demonstrate that the GWO formula outperforms well-known meta-heuristics in solving a number of benchmark functions.
3 Recent GWO variants
The complexity of real-world optimization problems has prompted adjustments to the GWO technique to make it compatible with the search space of complex domains. The following four categories can be used to summarize the changes made to the GWO: I. Adjustments to the update mechanism to address shortcomings when used to solve real-world issues; II. Changes to enhance operations; III. Creation of a hybrid version to improve exploration and exploitation; and IV. Development of multiple versions to deal with parallel processing platforms. Each of these four variations are explored in the following subsections.
3.1 Modified versions of the GWO
Based on the types of improvements proposed in each reviewed paper to enhance the functionality of the GWO, the improvements can be categorized into the following groups: refreshing mechanisms, new operators, and modified population hierarchy and structure. The subsequent paragraphs emphasize the key contributions made at each of these levels.
3.1.1 Refreshing mechanisms
Researchers in this research direction have focused on improving the balance between exploration and exploitation procedures. Within this domain, two key sub-directions have emerged to enhance this balance. The first aims to dynamically update GWO parameters, while the second offers various techniques for modification. The following discussion highlights the primary works within this category.
One study [32] proposed the VW-GWO, a better GWO with varying weights to maintain a strict social hierarchy within the wolf pack. This algorithm requires that the alpha position’s weight in Eq. 9 always be at least as great as that of the beta and delta positions. Therefore, the weight of the beta position should never be less than the weight of the delta position. Additionally, as shown in Eq. 10, a novel formula for governing the controlling factor is suggested in order to lower the likelihood of being trapped in local optima. ALO, PSO, BA, and the original GWO were used to test and compare the methodology using 11 benchmark functions. The results confirmed the proposed VW-GWO algorithm’s qualities.
An improved Alpha-Guided GWO was suggested by another author [33]. By adding a new guiding mechanism (refer Eq. 11) and a mutation operation (refer Eq. 12), it accelerates the algorithm’s convergence rate and keeps the system from settling into a local optimal state. The procedure is made simpler to use by scalar coefficients A and C. By contrasting the IAgGWO with other four algorithms on 35 benchmark functions, as well as the engineering problem of the two-stage operational amplifier design, the IAgGWO’s superior performance was established in the study.
A more precise model [34] was developed to mimic the hierarchy of authority and group hunting tactics used by grey wolves in the wild. According to this new model, each wolf moves straight in the direction of the prey’s predicted location (refer Eq. 13) and the location of each wolf is dynamically evaluated by the leader wolves (refer Eq. 14). According to the CEC2017 test suite, the updated optimizer performs noticeably better than the original version and its subsequent variations, both in terms of convergence speed and solution robustness.
To improve the wolf pack’s capacity to find prey, one paper [35] presented a GWO modification that added random walks to handle the leading wolves, called RWGWO. Equation (15) can be used to define the random walk for the leading wolf, where \({\alpha }_{1}\) > 0 is a variable that regulates the iteration’s step size \({s}_{i}\). It was shown that the performance of the RWGWO beat all other meta-heuristic algorithms and basic GWO on the CEC 2014 criterion.
A novel position-updated equation (see Eq. 16) was introduced [36] in an effort to improve the exploration by using a randomly chosen population member to direct the search for new potential prey. A nonlinear control parameter technique was also implemented to fully utilize and balance the GWO algorithm’s exploration and exploitation, as shown in Eq. 17. The new strategy’s effectiveness and efficiency were demonstrated by experimental findings on a set of 23 benchmark functions and four engineering applications.
Another suggested algorithm called the RBGWO [37] increases the search process’ overall effectiveness by balancing its exploitation and exploration potential, using three successive enhancement techniques that include a random walk with student-generated t-distributed random integers and a social hierarchy mechanism. In the first approach, every grey wolf’s location is updated based on weight variables, as in Eqs. 18 to 20. In the second method, Eq. 21 updates the wolf’s location, employing the idea of a random walk [35]. In the third strategy, a new randomization policy is implemented to improve the search’s efficiency, substantially strengthening the random walk, as shown in Eq. 22. On the CEC 2014 benchmark functions with various scales, the RBGWO demonstrated superiority over the GWO and its subvariants (RWGWO, EGWO + , and EGWO).
3.1.2 New operators
This line of research examines the potential for enhancing the performance of the GWO by adding new operators such as a crossover or a local search method. The key pieces of research in this area are covered in the following paragraphs.
To speed up the global convergence speed of the GWO, one author [38] incorporated chaos theory into the algorithm to form the CGWO. Comparisons were made between the most effective CGWO and a number of other well-known meta-heuristics, including the FM, FPA, and PSO algorithms. The outcomes demonstrated that the CGWO substantially outperforms ordinary GWO algorithms given a suitable chaotic map.
Using techniques from reinforcement learning, the experienced GWO (EGWO) [39] learns the actions that should be conducted at various optimization phases and in different regions of the search space. The experience data is stored in a neural network model. The original GWO, PSO, and GA were compared to the suggested EGWO in two important optimization applications: feature selection and ANN weight adaption. The results showed that the EGWO performs significantly better.
For the purpose of resolving worldwide optimization and engineering design problems, the Improved Grey Wolf Optimizer (I-GWO) was developed [40]. To overcome the lack of population diversity, the disparity between exploitation and exploration, and the GWO algorithm’s early convergence, the I-GWO algorithm is supported by the dimension learning-based hunting (DLH) search method as a novel mobility approach. The suggested algorithm’s performance on engineering design issues demonstrated its effectiveness and adaptability.
The enhanced grey wolf optimizer (EGWO) was developed and proposed [41], where the ability to hunt prey is enhanced by including Lévy flight phases and binomial crossing into the grey wolf’s hunting strategy. The suggested variation is also employed for clustering process optimization. Seven benchmark datasets from the UCI were used to test the EGWO’s clustering effectiveness and compare it to five other clustering methods. According to the empirical findings, it is a strong and promising alternative for effective large-scale data clustering.
Another enhanced GWO (TGWO) using tracking and searching modes was provided in one study [42]. On 19 test functions, the proposed enhanced algorithm’s performance was evaluated. The findings demonstrated that, compared to popular heuristics such as GWO, PSO, SSA, SCA, ALO, WOA, MFO, BGWO, PSOGWO, and GWOCS, the TGWO was able to deliver highly competitive results.
One article [43] developed a GWO version called GWOCMALOL, that is improved using a Levy flight mechanism, an orthogonal learning approach, and a covariance matrix adaptive evolution strategy (CMAES) to address the inadequacies of the original process. Experiments were performed using a variety of IEEE CEC2014 functions, 10 competing algorithms, 7 upgraded GWO versions, 11 advanced algorithms, the Wilcoxon signed-rank test, and 24 UCI data sets. The outcomes demonstrated that the created algorithm outperformed the original technique and fixed the flaws.
To fully benefit from better-performing particles for optimization in upcoming generations, the elite opposition-based learning strategy (EOBLS) has been presented [44]. A chaotic k-best gravitational search strategy (CKGSS) is recommended to obtain the adaptive step to improve global exploratory capabilities. Ten well-known benchmark functions were used in the study, along with an auto drum-style brake. The results demonstrate that among the six optimization algorithms, the EOCSGWO ranked first and is more accurate and resilient.
One improved hierarchy is integrated into the GWO technique using the accelerated GWO (AGWO), which was first developed in 2021 [45]. To improve both local and international searches, a mathematical model is first introduced. Then a diversification measure is suggested to end local confinement and maintain a perfect equilibrium between the processes of intensification and diversification. Additionally, a parameter-tuned method is added to accelerate the convergence rate. Twenty-three benchmark arithmetic problems were used to test the suggested methodology in MATLAB experiments. In comparison with other algorithms, the AGWO performed better in terms of standard deviation, best value, and convergence curve.
3.1.3 Modified population structure and hierarchy
Numerous research publications are devoted to improving the GWO algorithm, as discussed above. However, there are currently few advancements in modifying population hierarchy and structure to increase population variety and global search capabilities. The population structure can be changed to boost exploration capacity while preventing early convergence. To this end, the AP-TLB-IGWO, or adult-pup teaching–learning based interactive GWO approach, has been presented [46]. The suggested approach emphasizes improved generalization, search efficiency, and diversification using a new population structural framework.
The GWO’s primary trait is its leadership hierarchy; however, this trait affects how precisely it searches. To address this shortcoming, a suggestion was made for a GWO with enhanced hierarchy (GWO-EH) [47]. To strengthen exploration and improve the high-ranking wolves’ leadership, the enhanced position-updating formula is specifically implemented for the leading wolves. The worst three wolves are moved nearby the dominant wolves as part of a strategy to reinforce exploitation. Additionally, having self-adaptive weights depending on fitness draws attention to the social leadership structure while also accelerating the rate of convergence.
In one paper [48], an algorithm called the Diversity Strategy based GWO (DSGWO) is put forth. This algorithm boosts the performance of the GWO algorithm by combining the group-stage competition mechanism and the exploration–exploitation balancing mechanism. Empirical testing using two engineering challenges and the IEEE CEC 2014 benchmark functions demonstrated the effectiveness of the DSGWO algorithm in obtaining the dataset’s optimal solution, maintaining more population variety, and enhancing global search capabilities.
3.2 Hybridized versions of the GWO
To develop a better quality solution for contemporary and practical real applications in the field of global optimization, it has become a new research trend to hybridize two or more variations. In the literature, the GWO has been combined with other meta-heuristic algorithms. For instance, a brand-new hybrid algorithm (referred to as FWGWO) has been proposed [49]. By choosing a balance coefficient that properly integrates the benefits of two algorithms, the proposed approach combines the exploitation capacity of the GWO with the exploration ability of the fireworks algorithm to effectively attain global optima. Additionally, the fundamental wolf algorithm has been expanded [50] to incorporate biological evolution with the "survival of the fittest" (SOF) notion of the biological update of nature. Differential evolution (DE) is used to describe the wolf’s evolutionary history. In order to stop the algorithm from achieving the local optimum, the wolf pack is updated in accordance with the SOF principle.
The concept of PSO has also been established [51], which updates each grey wolf’s position information using the best values of the individual and the wolf pack. By using this approach, the algorithm is prevented from reaching a local optimum and the individual’s best position information is preserved. Next, utilizing experimental data obtained from a variety of operating conditions, several PV cell model properties were extracted to create a new hybrid algorithm called GWOCS [52], based on the GWO and cuckoo search. The key advantage of the GWOCS is its ability to establish a balance between exploration and exploitation. Extensive experimental findings indicate that the GWOCS is a good strategy for obtaining solar PV models’ parameters.
Another hybrid algorithm named GWO-ABC [53] utilizes the GWO and ABC algorithms as its foundation. The GWO-ABC algorithm allows wolves to continue using their traditional hunting methods to improve their capacity for exploitation while also adopting the bees’ information-sharing tactics to increase their capacity for exploration. Additionally, for several complex benchmark transfer functions as well as the trajectory tracking problem of a 2-DOF robotic manipulator, the GWO-ABC algorithm produces the best fractional order PID (FOPID) controllers.
The major goal of one suggested improved GWO [54] is to grant some wolves the ability to fly, hence extending the search window. The exploitation potential of the grey wolf and the exploration potential of the Aquila have been maintained despite changes made to the GWO to balance both strategies. Meanwhile, to help switching reluctance motors (SRMs) function better and handle a variety of operating circumstances, a unified control system based on an improved GWO that hybridizes GWOA and COA has been recommended [55]. To address the issue of HS parameter selection, one research [56] devised a hybrid of HS with the GWO.
3.3 Parallelism
In population-based meta-heuristics, parallelism is a useful strategy that allows the population to be split up into several subpopulations, each of which is capable of evolving on a different type of machine processor. Through parallelism, the quality of solutions can be improved while the optimizer’s execution time can be efficiently decreased. In one study [57] aiming to reduce the maximum completion time, SCEGWO, a new shuffling cellular evolutionary GWO was proposed to tackle the FJSSP-JPC. The wolf population in California is divided into numerous separate micro subpopulations based on neighbourhood layout. This concurrent multi-subpopulation approach can increase search diversity and address the GWO’s disadvantage. Extensive experimental findings show that the suggested SCEGWO greatly outperforms other competing algorithms on this topic.
3.4 Multi-objective GWO
To optimize problems with multiple objectives, the Multi-Objective GWO (MOGWO) was proposed for the first time [58]. The GWO features an internal fixed-sized external archive for storing and retrieving Pareto optimal solutions. The social order of grey wolves is determined using this information, and grey wolf hunting behaviour is simulated in multi-objective search spaces. Ten multi-objective benchmark problems were used to test the suggested approach, and it was then contrasted with two well-known meta-heuristics, Multi-Objective PSO (MOPSO) and Multi-Objective Evolutionary Algorithm Based on Decomposition (MOEA/D). The outcomes demonstrated that the suggested approach outperforms other algorithms and can deliver competitive results.
To determine the optimum operation of standalone gas turbine and hybrid gas turbine-solid oxide fuel cell systems, a novel approach was offered that combines the artificial neural network (ANN) concept with the GWO algorithm [59]. With this method, multiple objectives are achieved while simultaneously minimizing CO2 emissions and the unit cost of electricity. Compared to other techniques, this saves a significant amount of time.
For the home healthcare routing and scheduling problem with priority and uncertainty, a discrete multi-objective GWO (DMOGWO) has been suggested [60]. Specifically, a fuzzy multi-objective optimization model is constructed to increase the overall priority of all clients who are visited and decrease overall service costs. According to experimental findings, the proposed DMOGWO can successfully resolve the routing and scheduling issue in home care.
In one article [61], a method based on multi-objective binary GWO was utilized to forecast the energy consumption of appliances using the random forest, extra trees, decision tree, and K-nearest neighbour regression algorithms. The two objectives of the study were to maximize algorithmic prediction performance and minimize the number of chosen features.
4 Applications of GWO variants
The vast advantages of the GWO has led to significant applications across numerous key disciplines. In this review study, these applications are divided into the areas of machine learning, engineering, wireless sensor network, environmental modelling, medicine and bioinformatics, and image processing (see Fig. 12). Thorough descriptions of these applications are given in the subsections that follow.

Applications of the GWO
4.1 Machine learning applications
Recent publications on machine learning that used GWO, derived from Scopus, are charted in Fig. 13. It can be seen that various machine learning applications have used the GWO, falling into one of four primary groups: feature selection, neural network training, support vector machine optimization, and clustering applications.

Publications using the GWO in machine learning
4.1.1 Feature selection
In data mining and machine learning applications, feature selection, which is the action of deleting unnecessary or unusable information, is regarded as a vital pre-processing step [62]. In solving a multi-objective optimization problem, feature selection’s objective is to maximize classification accuracy while minimizing the number of characteristics that must be picked. Recent publications in Scopus that have employed the GWO in feature selection are shown in Fig. 14.

Publications using the GWO in feature selection
The Adaptively Balanced GWO (ABGWO) method [63] is recommended as a solution for determining optimal feature subsets in high-dimensional classification tasks. ABGWO introduces a random wolf to augment GWO’s exploration capabilities, employing a novel level-based technique for selecting the random wolf. Demonstrating its superior exploration and exploitation abilities, ABGWO outperforms seven state-of-the-art feature selection techniques on 12 high-dimensional datasets.
The combination of a new GWO method with a Two-phase Mutation has also been proposed [64] to address feature selection issues in classification based on wrapper approaches. This method employs the sigmoid function to transform the continuous search space into a binary one, aligning with the binary nature of feature selection problems. Comparative evaluations showcase the algorithm’s effectiveness and superiority over well-known algorithms like PSO and FA.
To resolve feature selection issues, one study [65] suggests a hybrid GWO and PSO in binary form, called BGWOPSO. This hybrid approach utilizes a wrapper-based K-nearest Neighbours classifier with Euclidean separation matrices to find optimal solutions. Evaluations on 18 benchmark datasets from the UCI library demonstrate the superior performance of BGWOPSO compared to binary GWO, binary PSO, binary genetic algorithms, and a whale optimization approach with simulated annealing.
Relatedly, another paper [66] presents an improved version of the binary GWO (BGWO). It examines the binary range of values for \(\overrightarrow{A}\) and \(\overrightarrow{D}\) and recommends a new updating equation for the parameter \(\alpha\) to balance the capabilities of local and global search capabilities. The proposed BGWO exhibits minimal classification errors in feature selection tasks on UCI datasets with a limited number of features.
To address challenges with Arabic text categorization, a wrapper FS function has been developed [67], containing an improved binary GWO that is applied as a wrapper-based feature selection technique. The proposed binary GWO, along with the elite-based crossover approach and the support vector machine (SVM) based feature selection method, proves more effective than competitors in handling Arabic text classification issues.
Scholars have also suggested a multi-strategy ensemble GWO (MEGWO) [68] to overcome the GWO’s limitation of using a single search strategy to solve different function optimization issues. MEGWO utilizes three alternative search techniques to update solutions and is assessed through feature selection in practical applications. Experimental results demonstrate MEGWO’s superiority in precision and convergence speed compared to previous GWO variants and other algorithms, owing to its integration of multiple improved search strategies.
4.1.2 Training neural networks
Biological nervous systems have served as the inspiration for ANNs, which are models designed for information processing. ANNs are widely employed in research and applications due to their exceptional ability to capture nonlinearity and dynamicity. However, the effectiveness of ANNs greatly depends on their connection weights and structure. Consequently, it is customary to assess how well a newly introduced meta-heuristic algorithm can optimize the connection weights of neural networks.
In one paper [69], a novel control approach based on Reinforcement Learning (RL) is outlined. This approach trains neural networks (NNs) using the GWO, a meta-heuristic algorithm, combined with Policy Iteration (PI). The study compares this method with the traditional PI RL-based control approach, which utilizes both the PSO meta-heuristic algorithm and the Gradient Descent (GD) algorithm. The experimental results demonstrate that, when compared to GD and PSO, the GWO algorithm offers a more effective solution for the control objective under consideration in this study.
The combination of an ANN and an AGWO has been proposed in an article [70] as a novel hybrid machine learning model. This hybrid model is designed for estimating the axial load-carrying capacity of CFST columns. The ANN-AGWO model optimizes the weights and biases of the ANN using the AGWO, creating a mapping feature that predicts the Pu value of CFST columns based on a set of influential factors. This approach holds promise for accurately forecasting the load-bearing capacity of CFST columns, as indicated by the results.
4.1.3 Optimizing support vector machine (SVM)
SVM is regarded as one of the most effective classifiers and regression models. Vladimir Vapnik established the SVM on solid mathematical foundations [71].
To enhance the performance of SVMs, adjustments to both the kernel settings and the error penalty parameter C are necessary. Typically, this challenge is addressed through a grid search, which explores various combinations. However, this method’s inefficiency arises from the time-consuming evaluation of numerous potential combinations. Consequently, many researchers have turned to employing meta-heuristic algorithms for optimizing these hyperparameters, with recent studies employing GWO to fine-tune SVM hyperparameters.
A unique machine learning technique dubbed the GWO-SVM [72] has been introduced to optimize the parameters C, ε, and g of the SVM model. The GWO-SVM model was developed to forecast adsorbed gas based on a data set containing temperature, pressure, total organic carbon (TOC), and humidity. The model shows good predictive ability towards output values based on empirical findings, outperforming previously suggested models.
Based on the Support Vector Regression (SVR) model, an improved IGWO-SVR model [73] has been built to capture the complex nonlinear relationship between coal body temperature and the characteristic gas concentration responsible for coal spontaneous combustion. The settings of the C and g parameters in the SVR model directly impact the model’s prediction ability, and the GWO technique is used to optimize the two parameters. Numerical experiments confirm the efficiency of this upgraded GWO method.
4.1.4 Clustering applications
The purpose of clustering, a popular machine learning and data mining activity, is to partition data points into several groups that share certain traits [74].
Additionally, a unique hybrid method called HBBOG (Hybrid GWO and BBO) was proposed [75]. Based on analyses of nine clustering datasets, the HBBOG produces more satisfactory outcomes compared to the three comparison techniques when tackling clustering optimization issues. Additionally, large-scale data sets can be efficiently clustered using the MapReduce-based enhanced GWO (MR-EGWO) [41]. This proposed technique provides a potent and promising option for effective and large-scale data clustering, as per experimental findings.
4.2 Engineering applications
4.2.1 Design and tuning controllers
For simultaneous stabilization and real-time position control of a laboratory scale MAGLEV system, GWO’s optimal tuning of the traditional PID controller is discussed in one study [76]. It is clear from simulation and real-time findings that the GWO works better than other optimization techniques.
In order to find the appropriate PID controller parameters for the control of the ball hoop (BH) system, one paper [77] used the GWO algorithm to minimize the commonly used objective functions IAE, ISE, ISTAE, and ITAE. With the GWO-tuned PID controller, the BH system with multiple goal functions was shown to run satisfactorily.
A GWO-optimized algorithm-based IMC method [78] was used to construct an optimal FOPID controller for a single region with a non-reheated turbine electrical power system. Better parameter values are provided by the GWO technique both before and after perturbation cases.
Using GWO, Agarwal et al. [79] tuned the FOPID controller’s criteria for regulating a DC’s speed. Along with GWO/PID, a comparison of the suggested GWO/FOPID methodology with other methods demonstrated that using ITAE as an objective function in the suggested approach results in less settling, faster rise times, and similar overshoot.
Two optimization techniques, the WOA and the GWO have been utilized in recent research [80] to modify PID controller gains. The aim is to improve the DC/DC boost converter, driven by the PWM duty cycle. According to the simulation findings, the two suggested algorithms outperform the standard ones in terms of response time, ripple, and power overrun.
An ideal tuning method for the Sun-Tracker System (STS) has been proposed [81] using the GWO and the fuzzy controller technology developed by Takagi, Sugeno, and Kang. The results show that using GWO-based optimization techniques is a solid choice for identifying the best compromise between error minimization and fuzzy tuning parameters for STS.
In order to account for GRCs and GDB nonlinearities, a two-area hydrothermal integrated power system with a secondary GWO-optimized fuzzy-PID controller can be used [82]. When contrasting the system responses under the suggested fuzzy-PID controller with those controlled by PI and PID for 1% SLP applied in area 1, the effectiveness of the suggested controller is evident.
An innovative PID-fuzzy PID hybrid (PID-FPID) controller tuned using the MGWO approach was successfully deployed in a connected system [83]. Using the MGWO technique, the ideal settings of this proposed PID–FPID hybrid controller are attained.
The Simplified GWO (SGWO) was proposed [84] as a method of tackling optimization problems in managing the frequency of an energy-storage-equipped distributed power generation system (DPGS) with an adaptive fuzzy PID (AFPID) controller.
Another unique methodology has been presented as a modified version of the GWO in conjunction with the cuckoo search algorithm (MGWO-CS) [85]. It is used in a TID controller structure for frequency management of a two-area power system integrated with a PV and thermal generator. Results from simulations show that the hybrid strategy outperforms other known techniques.
4.2.2 Power dispatch problems
According to Arun et al. [86], the PID controller gain should ideally be automatically adjusted by GWO, PSO, and GA to accommodate various loading scenarios, ultimately reducing area control error, settling time, undershoots, overshoots, and frequency fluctuations in multi-area power systems. It is evident that the frequency difference and net power fluctuation of Load Frequency Control (LFC) can be effectively managed through the implementation of evolutionary algorithms for PID controllers, such as GA, PSO, and GWO, regardless of whether the system considers Reactive Power Feedback (RFB) and Unified Power Flow Controller (UPFC) for multi-area operation.
4.2.3 4.2.3 Robotics and path planning
Quadruped robots offer several advantages, including exceptional obstacle-climbing abilities, low energy consumption, high adaptability, stability, and minimal environmental impact. Consequently, they play a significant role in the field of robotics and are increasingly popular. The GWO was utilized for the first time to fine-tune a PID controller on a quadruped robot as a diversification technique [87]. This approach compares GWO with two popular search algorithms, PSO and GA, to assess its optimization performance. Simulation results clearly demonstrate that the GWO algorithm outperforms both PSO and GA in terms of both local and global search optimization, offering superior speed and efficiency.
For unmanned aerial vehicles (UAVs), path planning is a critical component of mission planning. It is essential to choose the greatest route across a challenging environment. A brand-new hybrid GWO technique called the HSGWO-MSOS algorithm [88] was presented for dealing with the path planning issue for UAVs in difficult and dangerous environments. Experimental results show that the HSGWO-MSOS algorithm effectively identifies safe and efficient routes, surpassing GWO, SOS, and SA in terms of solving UAV path planning problems.
RLGWO, a novel reinforcement learning-based GWO method [89] has been introduced to tackle UAV path planning in a three-dimensional flight environment. This method incorporates reinforcement learning to dynamically adjust actions based on performance data over time, and it smooths the resulting flight path using a cubic B-spline curve to ensure UAV suitability. Simulation experiments validate the RLGWO algorithm’s ability to find feasible and efficient paths in challenging environments.
4.2.4 Scheduling
In the manufacturing industry, scheduling is a vital decision-making process that directly and significantly affects resource usage and production efficiency. With the primary goal of ensuring sensible and effective use of the resources at hand, scheduling is concerned with judiciously distributing scarce resources among a variety of duties that are spread out over time [90]. Given the fierce competition in the market for shorter product life-cycles, frequent product customization, and shifting consumer wants, many modern manufacturing enterprises use the adaptable industrial environment of a job shop, which can support different process pathways using many identical devices [91, 92]. Therefore, over the years, both academics and practitioners have given increasing attention to flexible job shop scheduling (FJSSP) [93, 94].
A flexible job shop scheduling problem with task precedence constraints (FJSSP-JPC) can be solved using the novel shuffled cellular evolutionary GWO (SCEGWO) [57], with the aim of decreasing makespan. Each SCEGWO agent engages in topological cellular neighbourhood interaction through the use of a micro-distributed form of the GWO. Extensive experimental findings show that the SCEGWO’s constituent parts are efficient, and it significantly outperforms other rival algorithms.
Considering the features of a welding shop, an IGWO was created [95] to solve the welding shop inverse scheduling problem (WSISP), which uses encoding and decoding techniques from the VNS, critical path, and matrix. The outcome shows that the proposed IGWO is both feasible and effective for resolving real-world WSISP scenarios.
In order to solve the travelling salesman problem (TSP), a modified GWO has been presented [96], which enhances the traditional GWO by using the swap operator and swap sequence. It is clear from the literature that the GWO has not been extensively investigated as a solution for TSP, a well-known combinatorial optimization problem. Similarly, the traditional GWO has been modified to solve the permutation-coded TSP using swap, shift, and symmetry transformation operators [97]. This new version is known as the transformation operator based grey wolf optimizer (TO-GWO). In TO-GWO, each wolf stands for a potential TSP solution, and by interacting with the leader wolves through the use of swap, shift, and symmetry operators, the wolves are able to reach the best feasible TSP solution.
4.2.5 Other engineering applications
According to the United Nations Environment Program, buildings account for 36% of the world’s carbon dioxide emissions and use around 40% of the energy produced globally [98, 99]. Building-related greenhouse gas emissions will virtually treble by 2030 if no action is taken to minimize energy use [98]. In order to reduce energy consumption, researchers must focus on increasing buildings’ energy efficiency [100, 101]. Therefore, the GWO was employed in one study [102] to reduce the annual energy usage of an office building under the Seattle climate. To carry out the building optimization task, the optimization method was developed and integrated with EnergyPlus codes. Additionally, back-propagation NNs with an adaptive GWO algorithm have been suggested as a revolutionary indoor thermal comfort and energy consumption control approach [103]. This emerging control method holds a powerful capacity for optimization.
Most work phases involved in tunnel boring machine (TBM) planning require assumptions and educated guesses. The risks associated with high capital costs and tunnel construction planning can thus be reduced by obtaining an accurate and trustworthy estimation of TBM performance. For forecasting the TBM-penetration rate (TBM-PR) [104], a long short-term memory (LSTM) model was reinforced with the GWO to construct a hybrid model. The final results demonstrated that the GWO technique can significantly improve LSTM performance.
For structures to operate safely, the evaluation of offshore wind turbine (OWT) structure performance deterioration is crucial. An approach to measure the deterioration of OWT structures’ performance was presented in one article [105], based on an improved variational mode decomposition (VMD) algorithm. The procedure introduces the GWO algorithm and the multisensor data fusion technique to optimize the VMD parameter setup. To measure the structural performance deterioration of OWTs, it then extracts the structural performance degradation signature of the structure using noise-reduction data.
Photovoltaic systems that are connected to the grid are frequently used to generate renewable-energy-based power all over the world. However, one of the key problems with their execution is optimal system design and relatedly, system sizing. The technical advantages of systems could be jeopardized by system components that are either under- or over-sized. To attain maximum efficiency of a grid-connected photovoltaic system design, one study [106] discusses the application of the GWO to select the best PV module and inverter models to calculate the maximum specific yield. The outcomes show that the GWO is faster in achieving the same precise yield as an iterative-based scaling algorithm. Moreover, to identify ambiguous parameters in PV cell models using a local exploratory technique, a novel Orthogonal-Learning-Based GWO (OLBGWO) was developed [107]. The performance of the OLBGWO demonstrates its advantage over competing algorithms.
In the field of renewable energy generation, fuel cells, particularly Solid Oxide Fuel Cells (SOFCs), have gained significant attention for their potential industrial and commercial applications. Researchers are dedicated to finding efficient and cost-effective ways to produce fuel cells. In this regard, Wang et al. [108] provided a new, well-structured methodology using an MGWO algorithm to determine the model parameters for an SOFC stack. This method provides an ideal selection of unknown variables for the SOFC stack model. The effectiveness of this technique has been validated upon comparison with various other methods.
In a similar vein, another study [109] focuses on the optimization of crucial operating parameters for SOFCs. The authors employ a specialized high-speed optimization approach known as the adaptive chaotic GWO algorithm. This innovative technique combines the strengths of both chaotic and adaptive GWO methods to identify essential functioning parameters of SOFCs.
In the context of tower solar thermal power plants, the heliostat field plays a crucial role, contributing significantly to the overall cost and concentrating efficiency. Optimizing the design of the heliostat field is essential. An enhanced GWO algorithm [110] is proposed, incorporating an optical efficiency model to optimize the heliostat field’s parameters. This enhanced algorithm improves convergence and weight update formulas while effectively avoiding local optima. As a result, the optical efficiency of the heliostat field increases by 8.2 percent compared to the standard GWO method.
The accurate assessment of axis straightness inaccuracy for shaft and hole parts is considered a nonlinear optimization problem. This problem can be solved effectively by using an intelligent optimization algorithm like the improved GWO (IGWO) [111], which also has the benefits of high solution accuracy, quick search times, and simple convergence. The IGWO is a valuable tool for assessing axis straightness errors in shaft and hole sections.
Apart from that, a deep learning-based technique for Pelton wheel defect diagnosis has been devised [112]. A recently created optimization technique, kernel estimate for mutual information (KEMI), is the fitness function used by the adjusted GWO (AGWO) to optimize the filter parameters of TVF-EMD. The results confirmed the proposed method’s effectiveness and superiority over other approaches.
The unit commitment problem when power system generation assets are operationally planned is a challenging, large-scale, and constrained optimization challenge. The BGWO was introduced in one paper [113] to discover the commitment schedule of the unit commitment problem. The superior performance of the BGWO was established in successfully resolving the unit commitment problem for small, medium, and large scale systems, surpassing other well-known heuristic and binary techniques.
A strategy for allocating hot spinning reserves (HSRA) was presented [114] in the wake of big generators’ anticipated disconnections during peak demand. Hybrid GWO (HGWO) was recommended as a way to prevent system cascade failures by optimizing reactive power allocation, load reduction, and generator rescheduling.
4.3 Wireless sensor network
In order to predict energy waste, a cluster-based routing technique for Wireless Body Area Networks (WBAN) has been reported [115]. It recommended using the Modified GWO with Q-Learning (MGWOQL) for cluster head selection and updating. By choosing the best cluster head, the suggested protocol utilized various goal functions to reduce the energy consumption of clusters (CH). On the MATLAB platform, the simulation was run under various circumstances. The results demonstrate its energy efficiency in the WBAN setting.
In another study [116], a Multi-Objective Linear Programming (MOLP) problem involving the deployment of Virtual Network Functions (VNF) was presented, bringing about an exchange between the two competing goals of minimizing service latency for customers and reducing deployment costs. A meta-heuristic BGWO technique was developed for the deployment of VNFs, driven by artificial intelligence (AI). It provides a close to optimum resolution in polynomial time due to MOLP.
4.4 Environmental modelling applications
Several research studies have utilized GWO to optimize reliable models in environmental modelling. In one study [117], a simulation–optimization model using the pump and treat (PAT) method is suggested, incorporating GWO-equipped ANN. This model effectively addresses two unconfined aquifer issues. Compared to the ANN-PSO and ANN-DE models, the groundwater remediation ANN-GWO model demonstrates superior stability and convergence behaviour.
The economic-environmental dispatch of conventional thermal units, heat-only units, and integrated combined heat and power units is tackled using a mutant GWO algorithm [118]. This approach considers valve-point impacts and temperature decline in heat pipelines. After conducting simulations on test systems with 24 units, 48 units, and 84 units, the outcomes of the mutant GWO algorithm are compared to other meta-heuristic algorithm, highlighting the superior performance of the recommended method.
A brand-new multi-process model for a clean coal power plant has been introduced [119], covering all processes from extremely low load to maximum continuous boiler rating and shutdown. GWO is employed to optimize all model parameters, outperforming GA in some aspects. The simulation results validate the effectiveness of both the model and the optimization strategies.
A hybrid wind speed prediction model, known as the MODWT-RF-IGWO-LSTM model, was developed [120] based on the IGWO, the random forest (RF) algorithm, the maximal overlap discrete wavelet transform (MODWT) technology, and the LSTM network. Ten more models were compared to the proposed MODWT-RF-IGWO-LSTM model to assess its predictive effectiveness, demonstrating its potential as a cutting-edge method to significantly improve wind speed prediction accuracy.
Another paper [121] presents an innovative combination model for wind speed forecasting and smart grid planning. This model integrates data pre-processing, forecasting algorithms, the GWO, and no negative constraint theory (NNCT), enhancing wind speed prediction accuracy significantly.
To find the global minimum, scholars presented the parameter shifted GWO (psGWO) [122] due to the limitations of the traditional GWO algorithm. The psGWO proves effective in seeking global minimum targets without getting stuck in local minima, as demonstrated in a 2D seismic dynamic rupture inversion for deriving parameters governing fault rupture dynamics behaviour from seismogram records.
4.5 Medical and bioinformatics application
The GWO has been used in a variety of ways for medical and bioinformatic applications. For instance, it was initially used to model biodiesel yield [123], while the Response Surface Methodology (RSM) and GWO were looked at to model the production of waste sunflower oil methyl ester (WSOME)/biodiesel (BD) from waste sunflower oil (WSO). In comparison with the RSM model, the root mean squared errors were reduced and the coefficient of determination was higher for the GWO model. GWO projected values show its dependability and utility for prediction without the trial-and-error process of conventional experimentation, making it superior to the RSM’s output.
The Grey Relational Analysis (GRA) and GWO algorithms were proposed [124] as a solution to the multi-objective optimization challenge encountered during the end milling of MWCNT/epoxy nanocomposites. The suggested hybridization strategy effectively manages the opposing machining features. In comparison with the conventional GRA approach, it effectively increases the desired machining performance and displays an excellent convergence plot.
Applying the RWGWO technique to chronic disease prediction has also been suggested [125] to enhance local search and strike, keeping exploration and exploitation in check. Using data from 18 different chronic diseases, a set of categorization metrics were assessed using several recent techniques for comparison with the RWGWO. The results indicate that the RWGWO technique outperforms other Nature Inspired Algorithms (NIAs) and may significantly reduce the amount of features in each chronic disease dataset.
Using the best possible set of features, the Binary Improved GWO (BIGWO) technique [126] was created for categorizing Parkinson’s disease. In the BIGWO, the search space of features is encoded using five different transfer functions, and the search procedure is fine-tuned using a mutation operation to identify the most useful traits for disease diagnosis.
4.6 Image processing
The proliferation of multimedia data, particularly photographs, on internet social media platforms has led to a growing focus on content-based picture retrieval systems. Despite the development of numerous strategies for content-based picture retrieval, face recognition remains a challenging task. The revised GWO (VW-GWO) was used in a research [127] to develop a facial recognition classification model that would optimize the SVM. Simulation studies confirmed the superiority and improved stability of the VW-GWO classification model.
Additionally, a unique GWO-based approach called mixed GWO [128] has been developed and is capable of handling both continuous and discrete or mixed situations. With this bio-inspired optimization technique, multispectral images have been simultaneously denoised and unmixed for the first time.
An Ensemble GWO (EGWO) [129] was created by employing the position-updated equation and the elite-based search strategy as two methods to improve GWO performance. On 12 photos from the USC-SIPI image set, the method exhibited satisfactory performance.
Images from chest X-rays (CXR) are more frequently used for the detection of COVID-19 instead of CT images, due to the former’s stronger visuals of lung features. A three-stage COVID-19 classification model based on CXR images was proposed using an enhanced GWO with genetic algorithm (EGWO-GA) and deep learning convolutional neural networks (DLCNN) for selecting the best features [130]. This model is referred to as CXGNet. In comparison with conventional RT-PCR, fast antigen, and serological tests, it classified the disease more quickly and required less human effort.
Image processing success is crucially impacted by the segmentation stage. Histogram-based thresholding is one of the most widely used techniques for picture segmentation. Consequently, for multi-level thresholding segmentation, authors [131] propose the discrete multi-objective shuffled GWO (D-MOSG) algorithm. Superior results have been attained with the D-MOSG method compared to other algorithms, according to experiments.
The MGWO was proposed as an improvement to the GWO in one study [132]. Through the use of multiple thresholds at four different threshold values, the MGWO was used to segment leaf spot illnesses on maize. The outcomes demonstrated that the MGWO is competitively visible and can be employed as a successful optimizer for multi-threshold image segmentation.
5 Assessment and evaluation of GWO
As previously mentioned, the success of the GWO algorithm can be attributed to its straightforward stimulus, limited regulating parameters, and adaptive exploratory behaviour. Over the last few years, the scope and volume of new GWO algorithm variants that are developed and applied to solve real-world problems have significantly increased. However, despite its success in resolving various real-world situations, there remain several significant challenges.
Firstly, one study [133] revealed an issue with the GWO’s performance. Specifically, it excels in optimization problems where the optimal solution is 0 but performs poorly when the optimal solution is 1 or when it is distant from 0. This performance discrepancy when handling different types of optimization problems needs further investigation, as other optimization algorithms may share this challenge.
Secondly, it is crucial to thoroughly investigate the parameter adjustments of GWO algorithms. Currently, only two parameters with predetermined values are used to balance exploration and exploitation throughout the search process. Research should explore the feasibility of conducting search operations with varying numbers of wolves in each iteration to improve algorithm performance.
Thirdly, there is a need for more research into identifying the most effective GWO algorithm variations for solving specific optimization problems. Efforts should be directed towards creating GWO variants with flexible and application-focused constraint schemes. Existing literature has largely relied on static penalty constraints handling techniques, which may prove ineffective in scenarios with complex search spaces lacking solutions that satisfy all requirements.
Lastly, a comprehensive analysis of key aspects of the GWO algorithm in hypothetical scenarios is essential. This analysis should cover aspects such as wolf population structure, parameter settings, and adaptive terrains. Notably, the reason behind the GWO’s utilization of only three leaders, known as "alpha wolves," and the implications of altering the number of alpha wolves (increasing or decreasing) on performance should be thoroughly investigated.
6 Conclusion and future research
This paper provides a comprehensive literature review on the most recent variants and applications of the GWO algorithm. The initial sections cover the primary inspiration, mathematical models, and analyses of the GWO algorithm. Subsequently, the algorithm’s performance, particularly in terms of exploitation and exploration, is thoroughly examined. Additionally, the paper briefly discusses the multi-objective variant of the GWO algorithm.
Following these analyses, the paper evaluates the latest research concerning parameter tuning, new operators, and hybrid versions of the GWO algorithm. It also discusses the diverse applications of GWO in various fields, including feature selection, ANN training, classification, clustering, controller design, power dispatch problems, robotics and path planning, scheduling, wireless sensor networks, environmental modelling, bioinformatics, and image processing. Results from these applications indicate that the GWO outperforms other bio-inspired algorithms, including BA, GA, FA, PSO, and more.
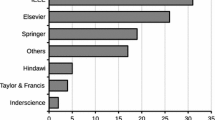
Figure 3 illustrates the distribution of GWO publications by subject category, revealing that over 30% of GWO applications pertain to computer science, while 24% are in the field of engineering. This study underscores the limited investigation of GWO by the research community, as it is a relatively new algorithm with under-researched applications in the literature. Tables 1, 2, and 3 provide concise summaries of related studies on the GWO algorithm.
Despite the growing popularity and recent advancement of the GWO, there are still areas that require further development. First, the GWO algorithm’s key limitations are its inability to manage multiple variables and its tendency to escape local solutions while tackling complex issues. Investigating the use of groups with varying numbers of wolves within the GWO could enhance its effectiveness when addressing challenging real-world problems.
Second, there are presently no studies attempting to adapt or use the GWO method to address dynamic situations. As the global optimum in a dynamic search space evolves with time, exploring appropriate operators (e.g. multi-swarm, repository, or performance measure) for the GWO in dynamic search spaces is a promising area.
Third, considering uncertainties in input, output, objective functions, and constraints is crucial for solving real-world problems effectively. Thus, research into how well the GWO performs in handling uncertainties and providing reliable solutions is needed.
Fourth, although the GWO has successfully handled a sizable number of issues in the real world, there has been no systematic research into the best ways to handle constraints in this approach. Since there are many infeasible regions in the search space, the death penalty function used by the majority of the existing efforts is ineffective. Consequently, a valuable research area is to give the GWO access to various constraint handling approaches and analyse their effectiveness.
Finally, to accomplish the proper trade-off between search elements for exploration and exploitation in the GWO, users must set two predetermined, constant parameters that influence the search. Parameter setting is a significant conundrum for novice users who are unfamiliar with utilizing the GWO properly Thus, parameter tweaking and the parameter-free GWO is another potential platform for interested scholars.
In conclusion, the GWO is a viable and strong contender for use in a wide range of applications, as outlined in the preceding discussions. This paper serves as a valuable roadmap, guiding researchers and practitioners towards effectively harnessing the GWO method to solve diverse problems. Consequently, the utilization of the GWO for tackling highly complex problems becomes not only practical but also highly feasible for both present and future efforts in this field.
Data availability
All data generated or analysed during this study are included in this published article (and its supplementary information files).
References
Amr HA, Khajehzadeh M, Taha M, Beheshti Z, Mariyam S, and Shamsuddin H, “A review of population-based meta-heuristic algorithm,” 2013. [Online]. Available: www.i-csrs.org
Mirjalili S, Mirjalili SM, Lewis A (2014) Grey wolf optimizer. Adv Eng Softw 69:46–61. https://doi.org/10.1016/j.advengsoft.2013.12.007
Institute of Electrical and Electronics Engineers (2008) In: IEEE World Congress on Computational Intelligence (2008: Hong Kong, Evolutionary Computation, 2008, CEC 2008, (IEEE World Congress on Computational Intelligence), IEEE Congress on: date, 1–6 June, 2008
Lin L, Gen M (2009) Auto-tuning strategy for evolutionary algorithms: balancing between exploration and exploitation. Soft Comput. https://doi.org/10.1007/s00500-008-0303-2
Kirkpatrick S, Gelatt CD, and Vecchi MP (1983) Optimization by Simulated Annealing. [Online]. Available: https://www.science.org
Biswas S, Acharyya S (2018) A Bi-objective RNN model to reconstruct gene regulatory network: a modified multi-objective simulated annealing approach. IEEE/ACM Trans Comput Biol Bioinform 15(6):2053–2059. https://doi.org/10.1109/TCBB.2017.2771360
Holland JH (1992) Genetic algorithms. Sci Am 267:66–72. https://doi.org/10.2307/24939139
Goldberg DE, Holland JH (1988) Genetic algorithms and machine learning. Mach Learn 3(2):95–99. https://doi.org/10.1023/A:1022602019183
Eberhart R and Kennedy J (1995) A new optimizer using particle swarm theory. In: Proceedings of the International Symposium on Micro Machine and Human Science, IEEE pp 39–43. doi: https://doi.org/10.1109/mhs.1995.494215
Mahdavi M, Fesanghary M, Damangir E (2007) An improved harmony search algorithm for solving optimization problems. Appl Math Comput 188(2):1567–1579. https://doi.org/10.1016/j.amc.2006.11.033
Biswas S, Dutta S, Acharyya S (2019) Identification of disease critical genes using collective meta-heuristic approaches: an application to preeclampsia. Interdiscip Sci 11(3):444–459. https://doi.org/10.1007/s12539-017-0276-x
Simon D (2008) Biogeography-based optimization. IEEE Trans Evol Comput 12(6):702–713. https://doi.org/10.1109/TEVC.2008.919004
Koza JR, Rice JP (1992) Automatic programming of robots using genetic programming. AAAI 92:194–207
Storn R, Price K (1997) Differential evolution-a simple and efficient heuristic for global optimization over continuous spaces. Kluwer Academic Publishers, Alphen aan den Rijn
Guo SM, Yang CC, Hsu PH, Tsai JSH (2015) Improving differential evolution with a successful-parent-selecting framework. IEEE Trans Evol Comput 19(5):717–730. https://doi.org/10.1109/TEVC.2014.2375933
Rashedi E, Nezamabadi-pour H, Saryazdi S (2009) GSA: a gravitational search algorithm. Inf Sci 179(13):2232–2248. https://doi.org/10.1016/j.ins.2009.03.004
Kaveh A, Talatahari S (2010) A novel heuristic optimization method: charged system search. Acta Mech 213(3–4):267–289. https://doi.org/10.1007/s00707-009-0270-4
Hatamlou A (2013) Black hole: a new heuristic optimization approach for data clustering. Inf Sci (N Y) 222:175–184. https://doi.org/10.1016/j.ins.2012.08.023
Kaveh A, Khayatazad M (2012) A new meta-heuristic method: ray optimization. Comput Struct 112–113:283–294. https://doi.org/10.1016/j.compstruc.2012.09.003
Kennedy J and Eberhart R (1995) Particle swarm optimization. In: Proceedings of ICNN’95—International Conference on Neural Networks, IEEE, pp 1942–1948. doi: https://doi.org/10.1109/ICNN.1995.488968
Dorigo M, Birattari M, Stutzle T (2006) Ant colony optimization. IEEE Comput Intell Mag 1(4):28–39. https://doi.org/10.1109/MCI.2006.329691
Karaboga D, Basturk B (2007) A powerful and efficient algorithm for numerical function optimization: artificial bee colony (ABC) algorithm. J Global Optim 39(3):459–471. https://doi.org/10.1007/s10898-007-9149-x
Mirjalili S, Lewis A (2016) The whale optimization algorithm. Adv Eng Softw 95:51–67. https://doi.org/10.1016/j.advengsoft.2016.01.008
Hammouri AI, Mafarja M, Al-Betar MA, Awadallah MA, Abu-Doush I (2020) An improved Dragonfly Algorithm for feature selection. Knowl Based Syst. https://doi.org/10.1016/j.knosys.2020.106131
Kahya MA, Altamir SA, Algamal ZY (2019) Improving firefly algorithm-based logistic regression for feature selection. J Interdiscip Math 22(8):1577–1581. https://doi.org/10.1080/09720502.2019.1706861
Faris H, Aljarah I, Al-Betar MA, Mirjalili S (2018) Grey wolf optimizer: a review of recent variants and applications. Neural Comput Appl 30(2):413–435. https://doi.org/10.1007/s00521-017-3272-5
Fu Y, Xiao H, Lee LH, Huang M (2021) Stochastic optimization using grey wolf optimization with optimal computing budget allocation. Appl Soft Comput. https://doi.org/10.1016/j.asoc.2021.107154
Liu M, Luo K, Zhang J, Chen S (2021) A stock selection algorithm hybridizing grey wolf optimizer and support vector regression. Expert Syst Appl. https://doi.org/10.1016/j.eswa.2021.115078
Khalilpourazari S, Hashemi Doulabi H, Özyüksel Çiftçioğlu A, Weber GW (2021) Gradient-based grey wolf optimizer with Gaussian walk: application in modelling and prediction of the COVID-19 pandemic. Expert Syst Appl. https://doi.org/10.1016/j.eswa.2021.114920
Muro C, Escobedo R, Spector L, Coppinger RP (2011) Wolf-pack (Canis lupus) hunting strategies emerge from simple rules in computational simulations. Behav Proc 88(3):192–197. https://doi.org/10.1016/j.beproc.2011.09.006
van den Bergh F, Engelbrecht AP (2006) A study of particle swarm optimization particle trajectories. Inf Sci 176(8):937–971. https://doi.org/10.1016/j.ins.2005.02.003
Gao ZM, Zhao J (2019) An improved grey Wolf optimization algorithm with variable weights. Comput Intell Neurosci. https://doi.org/10.1155/2019/2981282
Hu P, Chen S, Huang H, Zhang G, Liu L (2019) Improved alpha-guided grey wolf optimizer. IEEE Access 7:5421–5437. https://doi.org/10.1109/ACCESS.2018.2889816
Luo K (2019) Enhanced grey wolf optimizer with a model for dynamically estimating the location of the prey. Appl Soft Comput J 77:225–235. https://doi.org/10.1016/j.asoc.2019.01.025
Gupta S, Deep K (2019) A novel random walk grey wolf optimizer. Swarm Evol Comput 44:101–112. https://doi.org/10.1016/j.swevo.2018.01.001
Long W, Jiao J, Liang X, Tang M (2018) An exploration-enhanced grey wolf optimizer to solve high-dimensional numerical optimization. Eng Appl Artif Intell 68:63–80. https://doi.org/10.1016/j.engappai.2017.10.024
Adhikary J, Acharyya S (2022) randomized balanced grey wolf optimizer (RBGWO) for solving real life optimization problems. Appl Soft Comput. https://doi.org/10.1016/j.asoc.2022.108429
Kohli M, Arora S (2018) Chaotic grey wolf optimization algorithm for constrained optimization problems. J Comput Des Eng 5(4):458–472. https://doi.org/10.1016/j.jcde.2017.02.005
Emary E, Zawbaa HM, Grosan C (2018) Experienced gray wolf optimization through reinforcement learning and neural networks. IEEE Trans Neural Netw Learn Syst 29(3):681–694. https://doi.org/10.1109/TNNLS.2016.2634548
Nadimi-Shahraki MH, Taghian S, Mirjalili S (2021) An improved grey wolf optimizer for solving engineering problems. Expert Syst Appl. https://doi.org/10.1016/j.eswa.2020.113917
Tripathi AK, Sharma K, Bala M (2018) A novel clustering method using enhanced grey wolf optimizer and mapreduce. Big Data Res 14:93–100. https://doi.org/10.1016/j.bdr.2018.05.002
Guo MW, Wang JS, Zhu LF, Guo SS, and Xie W (2020) An improved grey wolf optimizer based on tracking and seeking modes to solve function optimization problems _ enhanced reader. IEEE Access
Hu J et al (2021) Orthogonal learning covariance matrix for defects of grey wolf optimizer: Insights, balance, diversity, and feature selection. Knowl Based Syst. https://doi.org/10.1016/j.knosys.2020.106684
Yuan Y, Mu X, Shao X, Ren J, Zhao Y, Wang Z (2022) Optimization of an auto drum fashioned brake using the elite opposition-based learning and chaotic k-best gravitational search strategy based grey wolf optimizer algorithm. Appl Soft Comput. https://doi.org/10.1016/j.asoc.2022.108947
Rajakumar R, Sekaran K, Hsu CH, Kadry S (2021) Accelerated grey wolf optimization for global optimization problems. Technol Forecast Soc Change. https://doi.org/10.1016/j.techfore.2021.120824
Banerjee N, Mukhopadhyay S (2022) AP-TLB-IGWO: adult-pup teaching–learning based interactive grey wolf optimizer for numerical optimization. Appl Soft Comput. https://doi.org/10.1016/j.asoc.2022.109000
Miao Z, Yuan X, Zhou F, Qiu X, Song Y, Chen K (2020) Grey wolf optimizer with an enhanced hierarchy and its application to the wireless sensor network coverage optimization problem. Appl Soft Comput J. https://doi.org/10.1016/j.asoc.2020.106602
Jiang J, Zhao Z, Liu Y, Li W, Wang H (2022) DSGWO: an improved grey wolf optimizer with diversity enhanced strategy based on group-stage competition and balance mechanisms. Knowl Based Syst. https://doi.org/10.1016/j.knosys.2022.109100
Yue Z, Zhang S, Xiao W (2020) A novel hybrid algorithm based on grey wolf optimizer and fireworks algorithm. Sensors. https://doi.org/10.3390/s20082147
Wang JS, Li SX (2019) An improved grey wolf optimizer based on differential evolution and elimination mechanism. Sci Rep. https://doi.org/10.1038/s41598-019-43546-3
Teng ZJ, Lv JL, Guo LW (2019) An improved hybrid grey wolf optimization algorithm. Soft Comput 23(15):6617–6631. https://doi.org/10.1007/s00500-018-3310-y
Long W, Cai S, Jiao J, Xu M, Wu T (2020) A new hybrid algorithm based on grey wolf optimizer and cuckoo search for parameter extraction of solar photovoltaic models. Energy Convers Manag. https://doi.org/10.1016/j.enconman.2019.112243
Gaidhane PJ, Nigam MJ (2018) A hybrid grey wolf optimizer and artificial bee colony algorithm for enhancing the performance of complex systems. J Comput Sci 27:284–302. https://doi.org/10.1016/j.jocs.2018.06.008
Ma C, Huang H, Fan Q, Wei J, Du Y, Gao W (2022) Grey wolf optimizer based on Aquila exploration method. Expert Syst Appl. https://doi.org/10.1016/j.eswa.2022.117629
Sun X, Xiong Y, Yao M, Tang X, Tian X (2022) A unified control method combined with improved TSF and LADRC for SRMs Using modified grey wolf optimization algorithm. ISA Trans. https://doi.org/10.1016/j.isatra.2022.05.013
Alomoush AA, Alsewari AA, Alamri HS, Aloufi K, Zamli KZ (2019) Hybrid harmony search algorithm with grey wolf optimizer and modified opposition-based learning. IEEE Access 7:68764–68785. https://doi.org/10.1109/ACCESS.2019.2917803
Zhu Z, Zhou X, Cao D, Li M (2022) A shuffled cellular evolutionary grey wolf optimizer for flexible job shop scheduling problem with tree-structure job precedence constraints. Appl Soft Comput 125:109235. https://doi.org/10.1016/j.asoc.2022.109235
Mirjalili S, Saremi S, Mirjalili SM, Coelho LDS (2016) Multi-objective grey wolf optimizer: a novel algorithm for multi-criterion optimization. Expert Syst Appl 47:106–119. https://doi.org/10.1016/j.eswa.2015.10.039
Hasanzadeh A, Chitsaz A, Ghasemi A, Mojaver P, Khodaei R, Alirahmi SM (2022) Soft computing investigation of stand-alone gas turbine and hybrid gas turbine–solid oxide fuel cell systems via artificial intelligence and multi-objective grey wolf optimizer. Energy Rep 8:7537–7556. https://doi.org/10.1016/j.egyr.2022.05.281
Li Y, Ye C, Wang H, Wang F, Xu X (2022) A discrete multi-objective grey wolf optimizer for the home health care routing and scheduling problem with priorities and uncertainty. Comput Ind Eng. https://doi.org/10.1016/j.cie.2022.108256
Moldovan D, Slowik A (2021) Energy consumption prediction of appliances using machine learning and multi-objective binary grey wolf optimization for feature selection. Appl Soft Comput. https://doi.org/10.1016/j.asoc.2021.107745
Li J et al (2017) Feature selection: a data perspective. ACM Comput Surv. https://doi.org/10.1145/3136625
Wang J, Lin D, Zhang Y, Huang S (2022) An adaptively balanced grey wolf optimization algorithm for feature selection on high-dimensional classification. Eng Appl Artif Intell 114:105088. https://doi.org/10.1016/j.engappai.2022.105088
Abdel-Basset M, El-Shahat D, El-henawy I, de Albuquerque VHC, Mirjalili S (2020) A new fusion of grey wolf optimizer algorithm with a two-phase mutation for feature selection. Expert Syst Appl. https://doi.org/10.1016/j.eswa.2019.112824
Al-Tashi Q, Abdul Kadir SJ, Rais HM, Mirjalili S, Alhussian H (2019) Binary optimization using hybrid grey wolf optimization for feature selection. IEEE Access 7:39496–39508. https://doi.org/10.1109/ACCESS.2019.2906757
Hu P, Pan JS, Chu SC (2020) Improved binary grey wolf optimizer and its application for feature selection. Knowl Based Syst. https://doi.org/10.1016/j.knosys.2020.105746
Chantar H, Mafarja M, Alsawalqah H, Heidari AA, Aljarah I, Faris H (2020) Feature selection using binary grey wolf optimizer with elite-based crossover for Arabic text classification. Neural Comput Appl 32(16):12201–12220. https://doi.org/10.1007/s00521-019-04368-6
Tu Q, Chen X, Liu X (2019) Multi-strategy ensemble grey wolf optimizer and its application to feature selection. Appl Soft Comput J 76:16–30. https://doi.org/10.1016/j.asoc.2018.11.047
Zamfirache IA, Precup RE, Roman RC, Petriu EM (2022) Policy Iteration Reinforcement Learning-based control using a Grey Wolf Optimizer algorithm. Inf Sci 585:162–175. https://doi.org/10.1016/j.ins.2021.11.051
Bardhan A et al (2022) A novel integrated approach of augmented grey wolf optimizer and ANN for estimating axial load carrying-capacity of concrete-filled steel tube columns. Constr Build Mater. https://doi.org/10.1016/j.conbuildmat.2022.127454
Vapnik VN (1999) An overview of statistical learning theory. IEEE Trans Neural Netw 10(5):988–999
Syah R, Towfighi Naeem MH, Daneshfar R, Dehdar H, Soulgani BS (2022) On the prediction of methane adsorption in shale using grey wolf optimizer support vector machine approach. Petroleum 8(2):264–269. https://doi.org/10.1016/j.petlm.2021.12.002
Li S, Xu K, Xue G, Liu J, Xu Z (2022) Prediction of coal spontaneous combustion temperature based on improved grey wolf optimizer algorithm and support vector regression. Fuel. https://doi.org/10.1016/j.fuel.2022.124670
Kogan J and Nicholas C (2006) A survey of clustering data mining techniques. In: Grouping Multidimensional Data, Marc Teboulle, Ed. pp 25–71
Zhang X, Kang Q, Cheng J, Wang X (2018) A novel hybrid algorithm based on biogeography-based optimization and grey wolf optimizer. Appl Soft Comput J 67:197–214. https://doi.org/10.1016/j.asoc.2018.02.049
Ray S, Kundu A, and Na T (2020) Optimization algorithm based PID controller design for a magnetic levitation system. In: Proceedings of 2020 IEEE Calcutta Conference
Jain N, Parmar G, Gupta R, Khanam I (2018) Performance evaluation of GWO/PID approach in control of ball hoop system with different objective functions and perturbation. Cogent Eng. https://doi.org/10.1080/23311916.2018.1465328
Padhan DG, Nawaz SS, and Ravikanth P (2020) A fractional order control strategy for LFC via big bang big crunch & grey wolf optimization algorithms. In E3S Web of Conferences, EDP Sciences, Aug. 2020. doi: https://doi.org/10.1051/e3sconf/202018401016
Agarwal J, Parmar G, Gupta R, Sikander A (2018) Analysis of grey wolf optimizer based fractional order PID controller in speed control of DC motor. Microsyst Technol 24(12):4997–5006. https://doi.org/10.1007/s00542-018-3920-4
Abderrahim Z, Eddine HK, Sabir M (2021) A new improved variable step size MPPT method for photovoltaic systems using grey wolf and whale optimization technique based PID controller. J Eur des Syst Autom 54(1):175–185. https://doi.org/10.18280/jesa.540120
Tripathi S, Shrivastava A, Jana KC (2020) Self-tuning fuzzy controller for sun-tracker system using gray wolf optimization (GWO) technique. ISA Trans 101:50–59. https://doi.org/10.1016/j.isatra.2020.01.012
Srilekha J, Saikalyan CN, Stanley G, Suneetha K, Thakreem MM (2020) Load frequency control of two area hydro-thermal system considering GRCs and GDB non linearity’s with intelligent controller. Int J Recent Technol Eng 8(5):4697–4705. https://doi.org/10.35940/ijrte.e6959.018520
Debnath MK, Jena T, Sanyal SK (2019) Frequency control analysis with PID-fuzzy-PID hybrid controller tuned by modified GWO technique. Int Trans Electr Energy Syst. https://doi.org/10.1002/2050-7038.12074
Padhy S, Panda S (2021) Application of a simplified grey wolf optimization technique for adaptive fuzzy PID controller design for frequency regulation of a distributed power generation system. Prot Control Modern Power Syst. https://doi.org/10.1186/s41601-021-00180-4
Khadanga RK, Kumar A, Panda S (2022) A modified grey wolf optimization with cuckoo search algorithm for load frequency controller design of hybrid power system. Appl Soft Comput. https://doi.org/10.1016/j.asoc.2022.109011
Arun B, Manikandan BV, Premkumar K (2021) Multiarea power system performance measurement using optimized PID controller. Microprocess Microsyst. https://doi.org/10.1016/j.micpro.2021.104238
Şen MA, Kalyoncu M (2018) Optimal tuning of PID controller using grey wolf optimizer algorithm for quadruped Robot. Balkan J Electr Comput Eng. https://doi.org/10.17694/bajece.401992
Qu C, Gai W, Zhang J, Zhong M (2020) A novel hybrid grey wolf optimizer algorithm for unmanned aerial vehicle (UAV) path planning. Knowl Based Syst. https://doi.org/10.1016/j.knosys.2020.105530
Qu C, Gai W, Zhong M, Zhang J (2020) A novel reinforcement learning based grey wolf optimizer algorithm for unmanned aerial vehicles (UAVs) path planning. Appl Soft Comput J. https://doi.org/10.1016/j.asoc.2020.106099
Branke J, Nguyen S, Pickardt CW, Zhang M (2016) Automated design of production scheduling heuristics: a review. IEEE Trans Evolut Comput 20(1):110–124. https://doi.org/10.1109/TEVC.2015.2429314
Singh MR, Singh M, Mahapatra SS, Jagadev N (2016) Particle swarm optimization algorithm embedded with maximum deviation theory for solving multi-objective flexible job shop scheduling problem. Int J Adv Manuf Technol 85(9–12):2353–2366. https://doi.org/10.1007/s00170-015-8075-1
Xu J, Nagi R (2013) Solving assembly scheduling problems with tree-structure precedence constraints: a Lagrangian relaxation approach. IEEE Trans Autom Sci Eng 10(3):757–771. https://doi.org/10.1109/TASE.2013.2259816
Gao K, Cao Z, Zhang L, Chen Z, Han Y, Pan Q (2019) A review on swarm intelligence and evolutionary algorithms for solving flexible job shop scheduling problems. IEEE/CAA J Autom Sin 6(4):904–916. https://doi.org/10.1109/JAS.2019.1911540
Amjad MK et al (2018) Recent research trends in genetic algorithm based flexible job shop scheduling problems. Math Probl Eng. https://doi.org/10.1155/2018/9270802
Wang C, Zhao L, Li X, Li Y (2022) An improved grey wolf optimizer for welding shop inverse scheduling. Comput Ind Eng. https://doi.org/10.1016/j.cie.2021.107809
Singha Sopto D, Akhand MAH, Islam Ayon S, and Siddique N (2018) Modified grey wolf optimization to solve traveling salesman problem; modified grey wolf optimization to solve traveling salesman problem. In: 2018 International Conference on Innovation in Engineering and Technology (ICIET), pp 1–4
Panwar K, Deep K (2021) Transformation operators based grey wolf optimizer for travelling salesman problem. J Comput Sci. https://doi.org/10.1016/j.jocs.2021.101454
Huovila et al., P (2009) Buildings and climate change: Summary for decision-makers. [Online]. Available: http://www.tge.ca
Ferrara M, Fabrizio E, Virgone J, Filippi M (2014) A simulation-based optimization method for cost-optimal analysis of nearly Zero Energy Buildings. Energy Build 84:442–457. https://doi.org/10.1016/j.enbuild.2014.08.031
Bernstein L, Bosch P, Canziani O, Chen Z, Christ R, and Riahi K (2007) Climate change 2007: synthesis report. IPCC, p 103
Delgarm N, Sajadi B, Kowsary F, Delgarm S (2016) Multi-objective optimization of the building energy performance: a simulation-based approach by means of particle swarm optimization (PSO). Appl Energy 170:293–303. https://doi.org/10.1016/j.apenergy.2016.02.141
Ghalambaz M, Jalilzadeh Yengejeh R, Davami AH (2021) Building energy optimization using Grey Wolf Optimizer (GWO). Case Stud Thermal Eng. https://doi.org/10.1016/j.csite.2021.101250
Li L, Fu Y, Fung JCH, Qu H, Lau AKH (2021) Development of a back-propagation neural network and adaptive grey wolf optimizer algorithm for thermal comfort and energy consumption prediction and optimization. Energy Build. https://doi.org/10.1016/j.enbuild.2021.111439
Mahmoodzadeh A, Nejati HR, Mohammadi M, Hashim Ibrahim H, Rashidi S, Ahmed Rashid T (2022) Forecasting tunnel boring machine penetration rate using LSTM deep neural network optimized by grey wolf optimization algorithm. Expert Syst Appl 209:118303. https://doi.org/10.1016/j.eswa.2022.118303
Ji X, Tian Z, Song H, Liu F (2022) Structural performance degradation identification of offshore wind turbines based on variational mode decomposition with a Grey Wolf Optimizer algorithm. Ocean Eng. https://doi.org/10.1016/j.oceaneng.2022.111449
Ebi I, Othman Z, Sulaiman SI (2022) Optimal design of grid-connected photovoltaic system using grey wolf optimization. Energy Rep 8:1125–1132. https://doi.org/10.1016/j.egyr.2022.06.083
Xavier FJ, Pradeep A, Premkumar M, Kumar C (2021) Orthogonal learning-based gray wolf optimizer for identifying the uncertain parameters of various photovoltaic models. Optik (Stuttg). https://doi.org/10.1016/j.ijleo.2021.167973
Wang J, Xu YP, She C, Xu P, Bagal HA (2022) Optimal parameter identification of SOFC model using modified gray wolf optimization algorithm. Energy. https://doi.org/10.1016/j.energy.2021.122800
Hao P, Sobhani B (2021) Application of the improved chaotic grey wolf optimization algorithm as a novel and efficient method for parameter estimation of solid oxide fuel cells model. Int J Hydrog Energy 46(73):36454–36465. https://doi.org/10.1016/j.ijhydene.2021.08.174
Xie Q, Guo Z, Liu D, Chen Z, Shen Z, Wang X (2021) Optimization of heliostat field distribution based on improved Gray Wolf optimization algorithm. Renew Energy 176:447–458. https://doi.org/10.1016/j.renene.2021.05.058
Song C, Wang X, Liu Z, Chen H (2022) Evaluation of axis straightness error of shaft and hole parts based on improved grey wolf optimization algorithm. Measurement. https://doi.org/10.1016/j.measurement.2021.110396
Vashishtha G, Kumar R (2022) An amended grey wolf optimization with mutation strategy to diagnose bucket defects in Pelton wheel. Measurement. https://doi.org/10.1016/j.measurement.2021.110272
Panwar LK, Reddy S, Verma A, Panigrahi BK, Kumar R (2018) Binary grey wolf optimizer for large scale unit commitment problem. Swarm Evol Comput 38:251–266. https://doi.org/10.1016/j.swevo.2017.08.002
Hoballah A, Azmy AM (2023) Constrained economic dispatch following generation outage for hot spinning reserve allocation using hybrid grey wolf optimizer. Alex Eng J 62:169–180. https://doi.org/10.1016/j.aej.2022.07.033
Bedi P, Das S, Goyal SB, Shukla PK, Mirjalili S, Kumar M (2022) A novel routing protocol based on grey wolf optimization and Q learning for wireless body area network. Expert Syst Appl 210:118477. https://doi.org/10.1016/j.eswa.2022.118477
Shahjalal M, Farhana N, Roy P, Razzaque MA, Kaur K, Hassan MM (2022) A Binary gray wolf optimization algorithm for deployment of virtual network functions in 5G hybrid cloud. Comput Commun 193:63–74. https://doi.org/10.1016/j.comcom.2022.06.041
Majumder P, Eldho TI (2020) Artificial neural network and grey wolf optimizer based surrogate simulation-optimization model for groundwater remediation. Water Resour Manage 34(2):763–783. https://doi.org/10.1007/s11269-019-02472-9
Afroozeh M, Abdolmohammadi HR, Nazari ME (2022) Economic-environmental dispatch of integrated thermal-CHP-heat only system with temperature drop of the heat pipeline using mutant gray wolf optimization algorithm. Electric Power Syst Res 212:108227. https://doi.org/10.1016/j.epsr.2022.108227
Al-Momani A, Mohamed O, Abu Elhaija W (2022) Multiple processes modeling and identification for a cleaner supercritical power plant via grey wolf optimizer. Energy. https://doi.org/10.1016/j.energy.2022.124090
Li Y et al (2022) Multi-step ahead wind speed forecasting approach coupling maximal overlap discrete wavelet transform, improved grey wolf optimization algorithm and long short-term memory. Renew Energy 196:1115–1126. https://doi.org/10.1016/j.renene.2022.07.016
Song J, Wang J, Lu H (2018) A novel combined model based on advanced optimization algorithm for short-term wind speed forecasting. Appl Energy 215:643–658. https://doi.org/10.1016/j.apenergy.2018.02.070
Zhang Z, Zhang Y (2021) Application of a parameter-shifted grey wolf optimizer for earthquake dynamic rupture inversion. Earthq Sci 34(6):507–521. https://doi.org/10.29382/eqs-2021-0049
Samuel OD, Okwu MO, Oyejide OJ, Taghinezhad E, Afzal A, Kaveh M (2020) Optimizing biodiesel production from abundant waste oils through empirical method and grey wolf optimizer. Fuel. https://doi.org/10.1016/j.fuel.2020.118701
Kharwar PK, Verma RK (2020) Exploration of nature inspired Grey wolf algorithm and Grey theory in machining of multiwall carbon nanotube/polymer nanocomposites. Eng Comput 38(2):1127–1148. https://doi.org/10.1007/s00366-020-01103-x
Deep K (2022) A random walk Grey wolf optimizer based on dispersion factor for feature selection on chronic disease prediction. Expert Syst Appl 206:117864. https://doi.org/10.1016/j.eswa.2022.117864
Ramasamy Rajammal R, Mirjalili S, Ekambaram G, Palanisamy N (2022) Binary grey wolf optimizer with mutation and adaptive K-nearest Neighbour for feature selection in Parkinson’s disease diagnosis. Knowl Based Syst. https://doi.org/10.1016/j.knosys.2022.108701
Barman B, Dewang RK, Mewada A (2022) Facial recognition using grey wolf optimization. Mater Today Proc 58:273–285. https://doi.org/10.1016/j.matpr.2022.02.161
Martin B, Marot J, Bourennane S (2019) Mixed grey wolf optimizer for the joint denoising and unmixing of multispectral images. Appl Soft Comput J 74:385–410. https://doi.org/10.1016/j.asoc.2018.10.019
Yu X, Wu X (2022) Ensemble grey wolf optimizer and its application for image segmentation. Expert Syst Appl. https://doi.org/10.1016/j.eswa.2022.118267
Gopatoti A, Vijayalakshmi P (2022) CXGNet: a tri-phase chest X-ray image classification for COVID-19 diagnosis using deep CNN with enhanced grey-wolf optimizer. Biomed Signal Process Control. https://doi.org/10.1016/j.bspc.2022.103860
Karakoyun M, Gülcü Ş, Kodaz H (2021) D-MOSG: discrete multi-objective shuffled gray wolf optimizer for multi-level image thresholding. Eng Sci Technol Int J 24(6):1455–1466. https://doi.org/10.1016/j.jestch.2021.03.011
Yu H et al (2022) Image segmentation of leaf spot diseases on maize using multi-stage Cauchy-enabled grey wolf algorithm. Eng Appl Artif Intell. https://doi.org/10.1016/j.engappai.2021.104653
Niu P, Niu S, Liu N, Chang L (2019) The defect of the grey wolf optimization algorithm and its verification method. Knowl Based Syst 171:37–43. https://doi.org/10.1016/j.knosys.2019.01.018
Funding
This work was supported in part by the Geran Insentif Putra Muda (GP-IPM) fund (Grant vot. number 9484800) and the Malaysia Fundamental Research Grant Scheme (FRGS) fund (Grant vot. number 5524740).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest regarding the publication of this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Liu, Y., As’arry, A., Hassan, M.K. et al. Review of the grey wolf optimization algorithm: variants and applications. Neural Comput & Applic 36, 2713–2735 (2024). https://doi.org/10.1007/s00521-023-09202-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-023-09202-8