
Abstract
In this paper, the finite-time stability for a class of shunting inhibitory cellular neural networks with neutral proportional delays is discussed. By employing differential inequality techniques, several sufficient conditions are obtained to ensure the finite-time stability for the considered neural networks. Meanwhile, the generalized exponential synchronization is also established. An example along with its numerical simulation is presented to demonstrate the validity of the proposed results.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the past decades, stability analysis of various classes of neural network models such as Hopfield neural networks, Cohen–Grossberg neural networks, cellular neural networks, and shunting inhibitory cellular neural networks (SICNNs) has been extensively investigated since the stable neural networks have been successfully applied to some practical engineering problems such as signal processing, pattern classification, associative memory design and control and optimization [1–9]. In particular, because of the complicated dynamic properties of the neural cells in the real world, the existing neural network models in many cases cannot characterize the properties of a neural reaction process precisely. Thus, it is natural and important that systems will contain some information about the derivative of the past state to further describe and model the dynamics for such complex neural reactions. Furthermore, the stability of SICNNs with neutral time-varying delays and continuously distributed delays has been the object of intensive analysis by numerous authors in recent years (see [10–13] and the references therein). Usually, time delays may lead to oscillation, divergence or instability which may be harmful to the system. Furthermore, the dynamic systems with proportional delays have many interesting applications in engineering and sciences such as biology, economy, control and electrodynamics [14–20]. Consequently, the stability of cellular neural networks (CNNs) with proportional delays has been extensively and intensively studied in [21, 22]. Most recently, there is a lively interest to analysis of finite-time stability (FTS) behavior for time-delay systems (see, e.g., [23–27] and the references therein). It is worth to mention here that FTS and Lyapunov asymptotic stability (LAS) are different concepts by mean a system may be FTS but not LAS and vice versa [1], and FTS is an useful concept to study in many practical systems in the vivid world [28–33]. However, to the best of our knowledge, no such work has been done on the SICNNs with neutral proportional delays. This motivates us to further study FTS of the following class of non-autonomous SICNNs with neutral proportional delays:
where \(C_{ij}\) denotes the cell at the (i, j) position of the lattice, the r-neighborhood \(N_{r}(i,j)\) of \(C_{ij}\) is
\(N_{q}(i,j)\) is similarly specified, \(x_{ij}\) is the activity of the cell \(C_{ij}\), \(L_{ij}(t)\) is the external input to \(C_{ij}\), \(a_{ij}(t)\) represents the passive decay rate of the cell activity, \(C_{ij}^{kl}(t)\) and \(B_{ij}^{kl}(t)\) are the connection or coupling strength of postsynaptic activity of the cell transmitted to the cell \(C_{ij}\), and the activity function \(f(x_{kl})\) is a continuous function representing the output or firing rate of the cell \(C_{kl}\), \(q _{ij}, i j \in J,\) are proportional delay factors and satisfy \(0< q _{ij} < 1\), and \(x^{ 0 }=(x_{11}^{0}, \ldots ,x_{mn}^{0})^{T}, x^{ 1 }=(x_{11}^{1}, \ldots ,x_{mn}^{1})^{T}\in \mathbb {R}^{mn}\) are the initial value of \(x_{ij}(t)\) and \(x'_{ij}(t)\) at time \(t_{0}=0\), respectively.
For convenience, we denote by \(\mathbb {R}^{mn}\)(\(\mathbb {R}=\mathbb {R}^{1}\)) the set of all mn-dimensional real vectors (real numbers). For any \(x=\{x_{ij}\}=(x_{11}, \ x_{12}, \ldots , x_{ mn})^{T} \in \mathbb {R}^{ mn}\), we let |x| denote the absolute-value vector given by \(|x|=\{|x_{ij}|\}\), and define \(\Vert x \Vert =\max \nolimits _{ ij\in J} |x_{ij } |\). Throughout this paper, it will be assumed that \(a_{ij}, L_{ij}, \ C_{ij}^{kl}, \ B_{ij}^{kl} :[t_{0}, \ +\infty )\rightarrow \mathbb {R}\) are bounded and continuous functions, where \(ij \in J.\)
We also make the following assumptions which will be used later.
\((A_0)\) for \(ij \in J\), there exist a bounded continuous function \(a_{ij}^{*} :[t_{0}, \ +\infty )\rightarrow (0, \ +\infty )\) and a positive constant \(K_{ij}\) such that
\((A_{1})\) there exist nonnegative constants \(\mu ^{f}\), \(\mu ^{g}\), \(M ^{f}\) and \(M ^{g}\) such that
\((A_{2})\) for each \(ij\in J\), there exist positive constants \(\eta ^{1}_{ij}\), \(\eta ^{2}_{ij}\), \(\eta ^{3}_{ij}\) and \(\eta ^{4}_{ij}\) such that
and
2 Main results
Definition 2.1
For a given time \(T > 0\) and positive numbers \(r_{1}< r_{2}\), a solution \(x^{*}(t)\) of (1.1) is said to be finite-time stable with respect to \((r_{1},r_{2},T )\) if for any solution x(t) of (1.1), \(\max \{\Vert x(0)-x^{*}(0)\Vert , \Vert x'(0)-x^{*} \ '(0)\Vert \}\le r_{1}\) implies that
for all \(t \in [0,T]\). System (1.1) is said to be finite-time stable with respect to \((r_{1},r_{2},T )\) if any solution \(x^{*}(t)\) of (1.1) is FTS with respect to \((r_{1},r_{2},T )\).
Lemma 2.1
Let \((A_{0})\) \((A_{1})\) and \((A _{2})\) hold. Suppose that \(x(t)= \{x_{ij}(t)\}\) is a solution of system (1.1) with initial values
where \(M\ge \max \{1, \ \max \nolimits _{ij\in J}K_{ij}\}\) is a constant. Then
Proof
From (2.1), we have
If the statement in (2.2) is false, there must exist \(ij \in J\) and \(\theta ^{*} >0\) such that
and
Note that
Multiplying both sides of (2.5) by \(e ^{ \int _{0}^{s}a_{ij}(u)\mathrm{d}u}\) and integrating it on \([0, \ t]\), we get
Thus, with the help of \((A_{0})\) \((A_{1})\), (1.2) and (2.4), we have
which, together with (2.3), implies that
From (1.3), (2.1), (2.3) and (2.5), we get
which contradicts (2.6). This proves Lemma 2.1. \(\square\)
Theorem 2.1
Assume that the conditions in Lemma 2.1 hold. Let \(x^{*}(t)= \{x_{ij}^{*}(t)\}\) be a solution of (1.1) with the initial condition (2.1). Then, for given \(0< r_{1}< r_{2}\) and \(T > 0,\) \(x^{*}(t)\) is finite-time stable with respect to \((r_{1}, r_{2}, T)\) if
Proof
In view of Lemma 2.1, we obtain
Let \(x(t)= \{x_{ij}(t)\}\) be any solution of (1.1). We denote
where \(t\ge 0, \ ij\in J\). It follows from (1.1) that
For any \(\varepsilon >0\), we obtain
In the following, we will show
Otherwise, there must exist \(ij\in J\) and \(\theta \in (0, \ T)\) such that
and
In view of (2.9), we obtain
Multiplying both sides of (2.5) by \(e ^{ \int _{0}^{s}a_{ij}(u)\mathrm{d}u}\) and integrating it on \([0, \ t]\), we get
Thus, with the help of \((A_{0})\), \((A_{1})\), (1.4), (2.7) and (2.13), we have
which, together with (2.12), implies that
From (1.5), (2.7) and (2.14), we get
which contradicts (2.15). Hence, (2.11) holds. Letting \(\varepsilon \longrightarrow 0^{+}\), we have from (2.10) that
Let \(\max \{\Vert x(0)-x^{*}(0)\Vert , \ \Vert x'(0)-x^{*'} (0)\Vert \}\le r_{1},\) by (2.16) and \(M r_{1} < r_{2}\), we have
This shows that \(x^{*}(t)\) is finite-time stable with respect to \(( r_{1},r_{2}, T)\). The proof is completed. \(\square\)
We can show the conditions in Theorem 2.1 ensure the following generalized exponential synchronization of system (1.1).
Theorem 2.2
Under the assumptions of Theorem 2.1, system (1.1) is generalized exponential synchronization at infinity, i. e., there exist two positive constants \(\beta\) and \(\sigma\), such that for any two solutions \(x(t), \bar{x} (t)\) of (1.1), the following inequality holds
where \(\Vert x(t)-x^{*}(t)\Vert _{\infty }=\max \{\Vert x(t)-x^{*}(t)\Vert , \Vert x'(t)-x^{*'} (t)\Vert \}\)
Proof
For any two solutions \(x(t), \bar{x} (t)\) of (1.1), we set \(x^{*}(t)\) be a solution of (1.1) with the conditions (2.1) and
Define continuous functions \(\Gamma _{ij} (\omega )\) and \(\Pi _{ij} (\omega )\) by setting
and
\(\text{ where } \ \omega \in [0, \ \min \nolimits _{ij\in J}\inf \limits _{t\ge 0}a_{ij} ^{*}(t)], ij\in J.\) Then, from (1.4) and (1.5), we have
we can choose a constant \(\sigma \in (0, \ \ \min \limits _{ij\in J}\inf \limits _{t\ge 0}a_{ij} ^{*}(t) )\) such that
This, together with the facts that
implies that
We still use the notation defined in (2.8). For any \(\varepsilon >0\), consider the functions \(V_{ij}(t),ij\in J,\) defined as follows
Therefore,
and
We next claim that
Otherwise, there must exist \(ij\in J\) and \(\theta _{1} \in (0, \ +\infty )\) such that
and
According to (2.2), (2.17), (2.18), (2.19) and (2.22) yield
which, together with (2.21), implies that
From (2.2), (2.22) and \(\Pi _{ij}(\sigma )<1\), we get
which contradicts (2.23). Hence, (2.20) holds. Letting \(\varepsilon \longrightarrow 0^{+}\), we have from (2.20) that
Moreover, similar arguments to those above show that
Thus,
where
This proves Theorem 2.2. \(\square\)

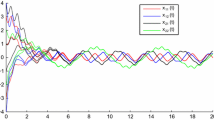
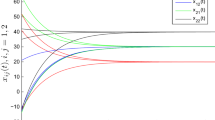
Numerical solutions to system (3.1) and its derivative with two groups of different initial values

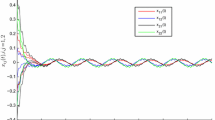
Synchronization errors \(x_{ij}(t)-x_{ij}^*(t)\) and its derivative for solutions of system (3.1) with two groups of different initial values
3 Example and remark
Example 3.1
Consider the following SICNNs with neutral proportional delays:
where \(t> 0, {x}_{ij}(0)=x_{ij}^{0}, {x}_{ij}'(0)=x_{ij}^{1} \in \mathbb {R}, \ i,j=1,2,\)
Clearly,
which imply that system (3.1) satisfies \((A_{0})\), \((A_{1})\) and \((A_{2})\). Let us take \(r_{1}=1.5, r_{2}=10>r_{1}e^{\frac{1}{1000}}\) and \(M=e^{\frac{1}{1000}}\). By the consequence of Theorem 2.1, it follows that the solution \(x^{*}(t)=\{x_{ij}^{*}(t)\}\) of system (3.1) with \(\{|x_{ij}^{*}(0) |\}<\{e^{-\frac{1}{1000}}\}\) and \(\{|x_{ij}^{*} \ '(0) |\}<\{e^{-\frac{1}{1000}}\}\) is FTS with respect to \((r_{1}, r_{2}, T)\) for any \(T>0\). This fact is verified by the numerical simulation in Fig. 1, and there are two groups of different initial values which are \({x}_{11}(0)=1.1, {x}_{12}(0)=-1.3, {x}_{21}(0)=1.2, {x}_{22}(0)=1.5\), \({x}_{11}'(0)=1.1, {x}_{12}'(0)=-1.3, {x}_{21}'(0)=1.2, {x}_{22}'(0)=1.5,\) and \({x}_{11}^*(0)=0.2, {x}_{12}^*(0)=-0.1, {x}_{21}^*(0)=0.4, {x}_{22}^*(0)=0.6, {x}_{11}^{*'} (0)=0.2, {x}_{12}^{*'} (0)=-0.1, {x}_{21}^{*'} (0)=0.4,{x}_{22}^{*'} (0)=0.6\). Moreover, from (3.2) and (3.3), we can choose \(\sigma =0.01\) such that (2.17) holds. Then, Theorem 2.2 implies that (3.1) is generalized exponential synchronization at infinity, and for any two solutions \(x(t), x^{*} (t)\) of (3.1), the following inequality holds
The numerical simulation in Fig. 2 strongly supports the conclusion, and there are two different initial values which are
and
Remark 3.1
Since the finite-time stability of the non-autonomous SICNNs with neutral proportional delays has not been done before, all results in the references [10–13, 21–36] cannot be applicable to prove the finite-time stability and the generalized exponential synchronization of (3.1). Moreover, in this present paper, we employ a novel proof to establish some criteria to guarantee the finite-time stability and the generalized exponential synchronization for neural networks systems with neutral proportional delays.
References
Hien LV (2014) An explicit criterion for finite-time stability of linear nonautonomous systems with delays. Appl Math Lett 30:12–18
Erneux T (2009) Applied delay differential equations. Springer, New York
Phat VN, Hien LV (2009) An application of Razumikhin theorem to exponential stability for linear non-autonomous systems with time-varying delay. Appl Math Lett 22:1412–1417
Ngoc PHA (2012) On exponential stability of nonlinear differential systems with time-varying delay. Appl Math Lett 25:1208–1213
Song B, Park JH, Wu ZG, Zhang Y (2013) New results on delay-dependent stability analysis for neutral stochastic delay systems. J Franklin Inst 350:840–852
Seuret A, Gouaisbaut F (2013) Wirtinger-based integral inequality: application to time-delay systems. Automatica 49:2860–2866
Bouzerdoum A, Pinter RB (1993) Shunting inhibitory cellular neural networks: derivation and stability analysis. IEEE Trans Circuits Syst 1 Fundam Theory Appl 40:215–221
Bouzerdoum A, Pinter RB (1991) Analysis and analog implementation of directionally sensitive shunting inhibitory cellular neural networks. Visual Inf Process Neurons Chips SPIE 1473:29–38
Bouzerdoum A, Pinter RB (1992) Nonlinear lateral inhibition applied to motion detection in the fly visual system. In: Pinter RB, Nabet B (eds) Nonlinear Vision. CRC Press, Boca Raton, pp 423–450
Chen Z (2013) A shunting inhibitory cellular neural network with leakage delays and continuously distributed delays of neutral type. Neural Comput Appl 23:2429–2434
Liu B (2015) Pseudo almost periodic solutions for neutral type CNNs with continuously distributed leakage delays. Neurocomputing 148:445–454
Liu X (2015) Exponential convergence of SICNNs with delays and oscillating coefficients in leakage terms. Neurocomputing 168:500–504
Zhao C, Wang Z (2015) Exponential convergence of a SICNN with leakage delays and continuously distributed delays of neutral type. Neural Process Lett. 41:239–247
Ockendon JR, Tayler AB (1971) The dynamics of a current collection system for an electric locomotive. Proc R Soc A 322:447–468
Fox L, Mayers DF, Ockendon JR, Tayler AB (1971) On a functional-differential equation. J Inst Math Appl 8(3):271–307
Derfel GA (1982) On the behaviour of the solutions of functional and functional-differential equations with several deviating arguments. Ukr Math J 34:286–291
Derfel GA (1990) Kato problem for functional-differential equations and difference Schrödinger operators. Oper Theory 46:319–321
Ockendon JR, Tayler AB (1971) The dynamics of a current collection system for an electric locomotive. Proc R Soc A 322:447–468
Fox L, Mayers DF, Ockendon JR, Tayler AB (1971) On a functional-differential equation. J Inst Math Appl 8(3):271–307
Derfel GA (1982) On the behaviour of the solutions of functional and functional-differential equations with several deviating arguments. Ukr Math J 34:286–291
Song X, Zhao P, Xing Z, Peng J (2016) Global asymptotic stability of CNNs with impulses and multi-proportional delays. Appl Sci Math Methods 39:722–733
Derfel GA (1990) Kato problem for functional-differential equations and difference Schrödinger operators. Oper Theory 46:319–321
Karafyllis I (2006) Finite-time global stabilization by means of time-varying distributed delay feedback. SIAM J Control Optim 45:320–342
Moulay E, Dambrine M, Yeganefar N, Perruquetti W (2008) Finite-time stability and stabilization of time-delay systems. Syst Control Lett 57:561–566
Yang R, Wang Y (2012) Finite-time stability and stabilization of a class of nonlinear time-delay systems. SIAM J Control Optim 50(5):3113–3131
Yang R, Wang Y (2013) Finite-time stability analysis and H control for a class of nonlinear time-delay Hamiltonian systems. Automatica 49:390–401
Efimov D, Polyakov A, Fridman E, Perruquetti W, Richard JP (2014) Comments on finite-time stability of time-delay systems. Automatica 50:1944–1947
Amato F, Ambrosino R, Ariola M, Cosentino C, De Tomasi G (2014) Finite-time stability and control. Springer, London
Garcia G, Tarbouriech S, Bernussou J (2009) Finite-time stabilization of linear time-varying continuous systems. IEEE Trans Autom Control 54:364–369
Amato F, Ariola M, Cosentino C (2010) Finite-time control of discrete-time linear systems: analysis and design conditions. Automatica 46:919–924
Yu Y (2016) Finite-time stability on a class of non-autonomous SICNNs with multi-proportional delays. Asian J Control. doi:10.1002/asjc.1323
Liu B (2016) Finite-time stability of CNNs with neutral proportional delays and time-varying leakage delays. Appl Sci Math Methods. doi:10.1002/mma.3976
Hien L, Son DT (2015) Finite-time stability of a class of non-autonomous neural networks with heterogeneous proportional delays. Appl Math Comput 251:14–23
Chen T, Wang L (2007) Power-rate global stability of dynamical systems with unbounded time-varying delays. IEEE Trans Circuits Syst II Express Briefs 54(8):705–709
Chen T, Wang L (2007) Global \(\mu\)-stability of delayed neural networks with unbounded time-varying delays. IEEE Trans Neural Netw 18(8):1836–1840
Wang L, Chen T (2014) Multiple \(\mu\)-stability of neural networks with unbounded time-varying delays. Neural Netw 53:109–118
Acknowledgments
The author thanks for the anonymous referees valuable opinions. The suggestions improve this paper and motivate some further works.
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by the Natural Scientific Research Fund of Hunan Provincial of China (Grant Nos. 2016JJ6103, 2016JJ6104), and the Construction Program of the Key Discipline in Hunan University of Arts and Science−Applied Mathematics.
Rights and permissions
About this article

Cite this article
Yu, Y. Finite-time stability on a class of SICNNs with neutral proportional delays. Neural Comput & Applic 28 (Suppl 1), 97–105 (2017). https://doi.org/10.1007/s00521-016-2295-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-016-2295-7