
Abstract
In the proposed research article, the grey wolf optimization (GWO) technique is utilized to optimize the proportional (P) integral (I) derivative (D) (PID) controller/regulator gain parameters in three-area grid-connected power networks. The interconnected power plant covers thermal plants, hydro plants, and nuclear power plants. The proposed controller is used as a secondary controller in the power system to perform load frequency control (LFC). Under unforeseen load conditions, the system frequency deviates from the norm. To control and stabilize this oscillation, the LFC system is used. During the investigation, a step load perturbation of one percent (SLP 1%) is applied for the analysis of the thermal power plant. The response of the suggested optimization technique-designed regulator performance is equated with the genetic algorithm (GA)-tuned, particle swarm optimization (PSO)-tuned, and ant colony optimization (ACO) technique-tuned PID regulator response. The performance response is evidence that the GWO-based PID regulator provides a regulated response with minimal time-domain specification parameters (settling time, peak shoots) over other tuning methods. The effectiveness and robustness of the improved response of the suggested technique-optimized controller are verified with various load values (1%, 2%, and 10% SLP) and nominal parameter (R, Tp, and Tij) variations (± 25% & ± 50%) from its nominal value.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The major and main task of any power generating unit is to generate quality power and allocate it to consumers without any interruption during emergency load-varying situations. The standard limits of power supply produced by the power system are affected due to sudden load demand. The sudden load demand crisis occurs because of enormous growth in technology and population. To eliminate this crisis in the power system, the LFC scheme has been introduced at the distribution end. On the occasion of unexpected load demand, the quality of power has been affected in the form of oscillations with a peak over, undershoot, and stability in frequency and power flow in the tie line across the interconnected plants. To rectify this crisis, two control loops are implemented in a power plant: prime and subordinate control loops. The control signal provided by the primary loop is insufficient to balance the large power demand that occurs in the system. To overawed this crisis, the subordinate control loop is employed and it creates more impact in power quality improvement in LFC/AGC. A literature review clearly related to the subordinate control loop shows that several research works have been carried out over the past decades. The function of the secondary control loop is to maintain the excellence of the generated power supply by maintaining frequency and tie-line power within the quantified limit, which is effectively discussed below. The literature review demonstrated that several combinations of controllers are developed to optimize controller gain parameters by adopting conventional artificial intelligence methods for maintaining the stability of the system and the quality of the power supply. However, conventional tuning methods have disadvantages, such as being a more time-consuming process compared to artificial intelligence techniques for optimizing the gain parameters. The duty of the AGC/LFC method in the power network is to regulate and maintain the standard limits of the system parameters during emergency loading situations (sudden load demand).
The author proposes a Bacteria Foraging Optimization Algorithm for constructing the PID controller to the grid-connected power network. The grid-connected power system network is formed by two areas with nonlinearity in Nagrath and Kothari (1994). The adaptive-fuzzy-logic-controller (ALFC) is considered and employed to overcome LFC issues in a multiarea interconnected network in Ali and Abd-Elazim (2013). The genetic algorithm-based optimal controller is designed to perform an LFC scheme for a 2-area grid-connected power generating unit in Yousef et al. (2014). In Milani and Mozafari (2011), a hybrid PSO-gravitational search algorithm (GSA)-designed power system stabilizer (PSS) and static synchronous series compensator (SSSC) component coordinated power network is developed for frequency regulation in the process of a power network. The LFC of an interconnected power network composed of solar and thermal generators was discussed in Khadanga and Satapathy (2015), and the controller was designed by utilizing the firefly algorithm (FA) for optimizing gain values. FA is implemented for the LFC issue for multiple area power networks for the regulation of system parameters under emergency situations and to find the optimized gain parameters of the controller in Abd-Elazim and Ali (2016a). To optimize the damping controller settings and unified power flow controller in power systems for frequency regulation and system stability, a new hGA + Gravitational Search-Algorithm (GA-GSA) is created (Padhan et al. 2014).
An LFC dispute in a nonlinear power generating network is evaluated by applying a novel hybrid GSA tuned optimized controller in Khadanga and Satapathy (2015). The LFC crisis in a nonlinear coupled power system was overcome by utilizing the BAT algorithm in Sahu et al. (2015). The response of a multi-source connected hydrothermal power network is enriched by utilizing a fractional order (FO)-fuzzy PID controller (FOFPID) controller along with an electric power storage unit [redox-flow-battery (RFB)] by applying the AGC scheme in Abd-Elazim and Ali (2016b). The Moth Flame Algorithm boosted dual mode controller is demonstrated in Arya (2017) to solve the AGC crisis of a multiarea hybrid resource comprised power system. A tilt integral derivative controller was designed and analysed in Mohanty et al. (2018) for the frequency regulation of islanded microgrids with the support of a novel hybrid dragonfly + pattern search optimization technique. Proportional Integral and Fuzzy Gain Scheduling Proportional Derivative (PI and FGS PD) regulators are developed and adopted for the LFC problem of two area interlinked (Diesel generator and PV) power systems in Khadanga et al. (2018).
The ACO technique-optimized PID regulator was utilized for the frequency regulation of standalone nuclear power plants in Ali et al. (2012). The frequency regulation of nuclear power plants integrated with thermal, gas, hydro, and PV power system networks was examined to solve LFC issues by designing a PSO-PID controller (Dhanasekaran et al. 2020) and a flower pollination algorithm (FPA)-based PID controller (Niu et al. 2019). A coupled two-area thermal power plant including nonlinearity [Governor Dead Band (GDB) and Generation Rate Constraint (GRC)] was investigated for solving the AGC crisis by utilizing a fuzzy logic controller in Kumarakrishnan et al. (2020). The FOPI and PD cascade controller gain parameters were tuned by employing the dragonfly optimization technique and implemented for AGC disputes in a coupled thermal power network in Jagatheesan et al. (2018). The PSO–PID controller was used to solve the LFC crises of a microgrid (MG) power network in Çelik (2021). In Boopathi et al. (2021), the LFC issues of a multiarea power network were overcome by adopting PSO technique-based PID and fuzzy PID controllers, which were utilized as auxiliary controllers. The Grasshopper Optimization Algorithm tuned 2 Degree of Freedom PID (2DOF-PID) regulator is employed to resolve the LFC issues of a 2-area power system. The FA-supported PID regulator solves the LFC crisis of a 2-area interlinked thermal energy power network in Shaker et al. (2020). A reheated thermal-hydro interconnected power network was investigated (Naidu et al. 2013) by applying the GWO-FPID controller, and the performance was compared with that of PSO and the optimal controller. An FLC is designed for solving the LFC crises of an interlinked power network in Lal et al. (2016). A robust controller tuned by an imperialist competitive algorithm was constructed and executed in Anand and Jeyakumar (2011) to analyse the LFC of 3-area thermal electrical energy plants. A nonlinear sliding mode controller was used to examine a multiarea interlinked thermal power plant with a reheater to control the frequency oscillation during emergency loading in Shabani et al. (2013).
A novel fuzzy PID + FO- PID controller was designed in Prasad et al. (2017) to examine the AGC crisis of multi-source [thermal-hydro gas (THG)] interconnected two-area power systems. The GWO technique-tuned PIDF controller is implemented for analysing the performance of Flexible-Alternating-Current-Transmission—Systems (FACTS) devices in Arya et al. (2021). The Improved-Lightning-Attachment-Procedure-Optimization (ILAPO) algorithm-based PID controller was adopted to solve the LFC problem in Nayak et al. (2020). A GWO-based PI-PD cascade controller was constructed and utilized in Khamies et al. (2021) for a single-area power network (THG) to overcome the LFC issue. The GWO–FPID controller involved in AGC of a 2-area interlinked power network with two or more sources and the impact of a superconducting-magnetic-energy-storage (SMES) system were also analysed in Padhy et al. (2017). The author in Lal and Barisal (2017) developed a novel artificial sheep algorithm for obtaining optimal gain values of the PID regulator to overcome the LFC issue of a power network. Apart from LFC, many engineering problems were solved by implementing various optimization techniques, such as FPA utilized to design antennas in Jagatheesan et al. (2021a) and hybrid FPA for structural design in Das and Shekhar Das (2021). Artificial bee chicken swarm optimization is applied for cloud computing (Altun and Pekcan 2021), and a coordinative optimization-based model predictive controller is implemented for cost-effective operation (Pushpa and Siddappa 2021; Hu et al. 2018). A hybrid power network was examined for LFC with a GWO-PID controller (Jagatheesan et al. 2021b). A microgrid was investigated by the Mayfly algorithm tuned PID controller, and the responses were compared with the GA, DE, PSO, and ACO techniques (Boopathi et al. 2023). Optimization algorithms are utilized for various fields, such as the multiobjective ant lion optimizer for the food industry (Goli et al. 2023), multiobjective grey wolf optimization for sustainable energy strategy (Ala et al. 2023a), ant lion optimization utilized for transferring wind energy (Ala et al. 2023b), and appointment management for health care centres (Ala et al. 2022). A summary of the literature review is reported in Table 1.
The above literature survey effectively shows that a greater number of optimization techniques/algorithms were supported to acquire optimized auxiliary controller gains to implement the LFC scheme in a single/interconnected power system. The review was conducted with more than 40 reputed research articles published in the past decade. In this work, the GWO algorithm is suggested for acquiring optimal gain values of the PID controller under a 1% step load perturbation for a thermal-hydro-nuclear power grid. Thermal power plants are the most common method of power generation. It has the advantage of easy source availability and mass power production, but pollution is a major disadvantage in thermal power plants. To compensate for thermal power plant mass production, nuclear plants, and pollution, hydropower plants are incorporated with thermal power plants. The performance of the proposed tuned regulator technique is examined by comparing its performance with GA-tuned, PSO-tuned, and ACO-tuned PID controller performance. In addition, the fitness and efficiency of the proposed GWO-PID controller are examined by applying different load disturbances and parameter variations from ± 25 to 50% of the nominal values.
1.1 Significance of the study
-
A conventional power network with and without pollution-free sources is constructed as a complex network for investigation.
-
An optimized secondary controller (PID) is designed and implemented for the LFC.
-
The simpler and more effective GWO algorithm is properly utilized for tuning the controller gain values.
-
The performance of the GWO is validated with GA, PSO, and ACO algorithms.
-
The reliability of the GWO is verified by conducting a robust test (different loading and variations in parameters).
The article is arranged as follows: The modelling of the analysed power system is discussed in Section II. Section III delivers details about the controller and suggests an optimization technique to acquire the gain parameters of the controller. Section IV shows the response and performance analysis of the proposed optimization technique-based controller response, and section V presents a robustness test to identify the efficiency and effectiveness of the proposed technique under different operating conditions. Finally, a conclusion about implemented optimization techniques is given in section VI.
2 System examined
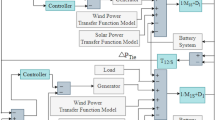
In this forthcoming work, the LFC of the Thermal–Hydro–Nuclear (THN) power network is developed, and the linearized model of the examined THN is given in Fig. 1. Thermal power plants are the most common and conventional method of power production. It comprises a governor that controls the input to the turbine. The reheated and turbine units convert the thermal energy into mechanical energy. Nuclear power plants are not much familiar in power production, but developed countries have these plants. The nuclear power unit includes a governor and low-pressure and high-pressure turbine units. Hydropower plants generate electricity with minimal pollution, so hydro plants are preferred. The hydropower generating unit comprises an electric governor and a speed regulator, and the PID controller is separately equipped in each plant as a secondary controller. The numerical values of the proposed and investigated power plant Simulink model are given in Appendixes (Arya 2017; Ali et al. 2012; Kumarakrishnan et al. 2020; Nagrath and Kothari 1994).

Simulink model of the proposed model (thermal + nuclear + hydro)
3 Structure of the controller and optimization technique
3.1 PID controller
The PID controller is the most commonly used controller in industrial applications. This offers effective power quality performance and control actions under critical situations. The PID controller offers superior performance in all conditions in either plant or functions. Equation 1 represents the transfer function of the proposed controller (Dhanasekaran et al. 2020)
In the controller, optimal values of gain are the most important. In this connection, optimization algorithms are implemented to solve the criteria by the appropriate selection of the objective function. In this examined research, a suitable cost function (ITAE) is preferred.
3.2 Grey wolf algorithm
The grey wolf algorithm is a popular animal-based optimization algorithm that is derived from the activities and prey hunting process of the grey wolf. Normally, the wolf in a group is classified into three categories: alpha, beta, and coma. Each level of wolf has a different priority in the group. The hunting approach and social hierarchy are the basic motivations for the development of the GWO metaheuristic optimization technique. These three steps are involved in the hunting strategy of grey wolves. These steps are approaching, hunting, and attacking prey (Lal and Barisal 2017). The steps are as follows:
ENCIRCLING: A grey wolf surrounds its prey after finding its location. The mathematical encircling process is denoted as follows (Lal and Barisal 2017):
From this t, X(t), X(t + 1), and Xp(t) represent the total number of iterations, one grey wolf, and arrival if the next position particularly points out any one of α, β, or δ, respectively. Similarly, coefficient vectors A and C are represented as follows (Lal and Barisal 2017):
In the above equation, random vectors [0, 1] are represented as r1 and r2, and the decreasing value [0,2] is denoted as a. In this case, a is usually denoted as a = 2 – 2t/I (where I denotes the maximum number of iterations).
Hunting based on the direction of α, β, δ, prey is hunted by grey wolves after encircling. The following describes the updating principle in this process (Lal and Barisal 2017):
Attacking prey After capturing the prey, the grey wolves were surrounded by it (convergence and result). As a result of A|– 2a, 2a|, Eq. 4 can be determined. This process is achieved when |A|≥ 1. When |A|< 1 at the time grey wolves stay away from prey, the global search is completed. This process is completed when the value |A|< 1 at the time the wolf approaches the prey (Lal and Barisal 2017).
GWO is a bionic-type optimization method that is based on grey wolf behavior for collecting prey with explicit work division and mutual cooperation. Grey wolves generally live in a pack and are the superior of the food chain process. In most cases, a grey wolf pack comprises 5–12 wolves. Grey wolves are managed in a tight hierarchical manner, and this order permits the wolf to proficiently kill the prey. In the hierarchy, α is the most powerful wolf, and it is the toughest layer and most capable individual. The β and δ layers are the subordinates who assist α. In a group organization, ω is the bottom layer of the grey wolf hierarchical pyramid, and its main function is to maintain the interrelationship between the population and by appearing young. A typical pray search approach of the grey wolf is shown in Fig. 2. Similarly, the optimization flow of the proposed PID controller is given in Fig. 3. The pseudocode of the proposed technique (GWO) is given in Fig. 4. GWO contains fewer parameters and simpler concepts and is easier to implement than standard optimization algorithms, such as PSO and GA. Additionally, GWO took less time to optimize the parameters than PSO and GA.

Typical prey search approach of a grey wolf (Lal and Barisal 2017)

GWO technique PID controller optimization flowchart

Pseudocode—GWO technique
The grey wolf optimization technique PID controller tuning flowchart is given in Fig. 3 for a clear understanding of the proposed work.
The evaluation of convergence representation among the GA, PSO, ACO, and GWO techniques is displayed in Fig. 5.

GA, PSO, ACO, and GWO convergence characteristics
The parameters considered during the optimization of the proposed algorithm along with the compared techniques are depicted in Table 2.
In this delivered work, the GWO technique supports the tuned controller gain values for reducing the deviations in the system frequency during the emergency loading condition. GWO provides optimal controller gain parameters by utilizing the ITAE-based proposed PID controller, and the optimized gain values are reported in Table 3.
4 Performance analysis of the proposed power system
The designed regulator is implemented in the designed three-area (THN) interlinked power network to control the frequency oscillation and power flow in the tie line during unexpected loading conditions. The projected Simulink power network model is simulated in the MATLAB 2016a Simulink platform for 120 s. MATLAB is a numeric and program computing platform for data analysis, model creation, and performance analysis. In this section, the preformation of the investigated system has been analysed by two cases. In case 1, the response investigation of the GWO-tuned PID controller with the GA-, PSO-, and ACO-tuned PID controller results, and in case 2, robustness test analysis conducted by changing the load disturbance from 1 to 10% and changing the system parameters.
Case 1: Response investigation of the GWO-tuned PID controller In case 1, the GWO technique-optimized PID controller is adopted in the proposed (THN) power network, and its performance is examined with 1% SLP in area 1 of the interlinked THN system. Additionally, the supremacy of the implemented GWO-tuned PID controller is examined over other tuned controller techniques (GA, PSO, and ACO) in comparison with 1% SLP in the system. The performances (delF, ACE, and delPtie) of the investigated system are plotted in Figs. 6, 7, 8, 9, 10, 11, 12, 13 and 14. The time-domain specification parameters of the responses (Figs. 6, 7, 8, 9, 10, 11, 12, 13 and 14) are tabulated in Table 4.

Response of frequency deviation area1

Response of frequency deviation area 2

Response of frequency deviation area 3

ACE deviation area 1

ACE deviation area 2

ACE deviation area 3

Tie line power flow deviation areas 1 and 2

Tie line power flow deviation areas 2 and 3

Tie line power flow deviation areas 1 and 3
By observing the response comparisons (Figs. 6, 7, 8, 9, 10, 11, 12, 13 and 14) of the proposed controller response in the THN system with GA-tuned, PSO-tuned, and ACO-tuned PID regulator parameters [settling time (Ts), overshoot (OS), and under shoot (US)] are tabulated in Table 4. Additionally, the convergence graph effectively shows that the proposed GWO technique is superior to other techniques in tuned controller behavior.
By analysing the response of GWO-PID with the genetic algorithm, PSO, and ACO-PID controller behavior in Figs. 6, 7, 8, 9, 10, 11, 12, 13 and 14, the mathematical values reported in Table 4 and bar chart (histogram) comparisons of settling time (Figs. 15, 16 and 17) effectively show that the GWO technique-based PID controller is superior to the genetic algorithm, PSO and ACO methods, and the optimized regulator performance improved the time-domain specification parameters. For example, the frequency deviation is set back to the original position by GWO as fast as the GA, PSO, and ACO techniques. In delF1, GWO settled the oscillation at 14 s, which is quicker than GA: 22 s, PSO: 20 s, and ACO: 16 s. In delF2 GWO tune controller provided improved response than GA:21 s, PSO:19 s, and ACO:18 s, similarly in delF3 controlled the system error and settled the oscillation at 14 s than GA, PSO, and ACO. This statistical analysis demonstrated the supremacy of the GWO algorithm over GA, PSO, and ACO.

Histogram comparison of settling time in system frequency

Settling time histogram comparison of tie-line power flow

Settling time histogram comparison of area control error
The accumulation efficacy and robustness of the suggested GWO technique-based PID controller is examined in case 2 of the following sections. In case 2, robustness analyses are carried out for three scenarios (scenarios A, B, and C); the details are given below.
Case 2: Robustness test analysis The quality analysis of the investigated GWO technique-tuned PID controller performance is verified by the following two scenarios. For example, in scenarios A and B, scenario A comprises variations in load disturbance in the analysed system, and scenario B includes sensitivity analysis performed by variations ± 25 and 50% in the R, TP and Tij parameters from their nominal values.
Scenario A: Load disturbance analysis In this scenario, 1%, 2%, and 10% load disturbances are applied in area 1 of the designed three-area THN power network. The suggested controller supremacy is analysed in case 1. To find the stability and dependability of the suggested optimization algorithm, a robustness test is carried out with load disturbance by applying 1%, 2%, and 10% load disturbance in area 1 of the designed system. The responses of frequency deviation area 1 with different loading conditions are clearly depicted in Fig. 18.

Frequency response of area 1 for load disturbance analysis
The Ts, OS, and US (time-domain) parameters of the robustness test from Fig. 18 are shown in Table 5. From Fig. 18 and Table 5, the stability and reliability of the GWO technique is clearly analysed and effectively shows that the proposed GWO-PID controller gives enhanced performance during different loading conditions.
Scenario B: sensitivity analysis
In this scenario, the parameter values of the speed regulator (R), tie-line coefficient (Tij) and power system time constant (Tp) are progressively from ± 25% and 50% from their nominal values with respect to 1% SLP in area 1. The improved time-domain specification parameters of this case are listed in Table 6 (see Figs. 19, 20 and 21).

Response of deviations in F1 associated with 1% SLP and ± 25% and 50% variations in the speed regulator

Response of deviations in F1 associated with 1% SLP and ± 25% and 50% variations in the power system time constant

Response of deviations in F1 associated with 1% SLP and ± 25% and 50% variations in tie-line coefficient
According to the findings of the sensitivity analysis, the suggested optimization technique optimized the PID controller and functioned admirably in the presence of extreme fluctuations in system parameters. In all scenarios (A & B), the settling time of the system frequency does not deviate 30 s maximally in all cases.
Scenario C: Wilcoxon’s rank sum test The efficacy of the proposed GWO technique-tuned PID controller performance is verified by conducting tests in the proposed three-area thermal, nuclear, and hydro model interlinked system, as shown in Table 7. It is effectively shown that the proposed technique (GWO-PID) is more significant than other methods (GA, PSO, and ACO).
In this research, the LFC crisis of a multiarea power network with three different sources, thermal, hydro, and nuclear areas, is interconnected with the help of tie lines, and the performance of the system is analysed above (Cases 1 and 2). Based on the response analysis in case 1, the GWO technique-optimized controller yields a more enhanced performance than the PSO, GA, and ACO technique-based controllers under 1% SLP in the investigated HTN power network. Similarly, in case 2, robustness (load disturbance analysis and sensitivity analysis) and Wilcoxon’s rank sum test tests also proved the dominance of the suggested GWO technique-tuned controller behavior.
5 Conclusion
In this article, LFC/AGC issues for a multiple area interlinked THN power system have been demonstrated with a secondary controller (PID controller). The GWO technique is suggested and implemented to obtain optimal gain parameters of the PID controller. This is involved in controlling and maintaining the system output power in the tie line between interconnected areas and frequency without any damping oscillations during unpredicted load-varying conditions. The performance of the proposed GWO—PID controller behavior is first confirmed by comparing it to GA, PSO, and ACO-PID controllers with 1% SLP applied to the first area of the interlinked system. The suggested optimization algorithm optimized controller has provided its efficacy in fast settling time over GA, PSO, and ACO techniques. In area 1 frequency (GA:22 s > PSO:20 s > ACO:16 s > GWO:14 s), area 2 frequency (GA:21 s > PSO:19 s > ACO:18 s > GWO:17 s), and area 2 frequency (GA:21 s > PSO:19 s > ACO:18 s > GWO:17 s). Finally, the reliability of the proposed GWO-PID controller in the three-area interconnected THN is verified by applying various load disturbance values (1, 2, and 10% SLP) and severe variations in the system parameters (R, Tij, and Tp). The simulation results show that the proposed controller gives a superior response under different operating conditions and several parameter variations. This work may be extended with different secondary control and optimization techniques.
Availability of data and materials
Not applicable.
Code availability
Not applicable.
References
Abd-Elazim SM, Ali ES (2016a) Load frequency controller design via BAT algorithm for nonlinear interconnected power system. Int J Electr Power Energy Syst 77:166–177
Abd-Elazim SM, Ali ES (2016b) Load frequency controller design of a two-area system composing of PV grid and thermal generator via firefly algorithm. Neural Comput Appl 29:1–10
Ala A, Simic V, Pamucar D, Tirkolaee EB (2022) Appointment scheduling problem under fairness policy in healthcare services: Fuzzy ant lion optimizer. Expert Syst Appl 207:117949
Ala A, Simic V, Pamucar D, Jana C (2023a) A Novel neutrosophic-based multi-objective grey wolf optimizer for ensuring the security and resilience of sustainable energy: a case study of Belgium. Sustain Cities Soc 96:104709
Ala A, Mahmoudi A, Mirjalili S, Simic V, Pamucar D (2023b) Evaluating the performance of various algorithms for wind energy optimization: a hybrid decision-making model. Expert Syst Appl 221:119731
Ali JS, Abbasi SH, Shabaninia F (2012) Load frequency control of two area interconnected power system (Diesel Generator and Solar PV) with PI and FGSPI controller. Artif Intell Signal Proc, pp 526–531
Ali ES, Abd-Elazim SM (2013) BFOA based design of PID controller for two area load frequency control with nonlinearities. Int J Electr Power Energy Syst 51:224–231
Altun M, Pekcan O (2021) Optimum sizing of truss structures using a hybrid flower pollinations. In: Dey N (ed) Applications of flower pollination algorithm and its variants. Springer, Singapore, pp 113–137
Anand B, Jeyakumar AE (2011) Load frequency control of interconnected hydrohydro system with fuzzy logic controller. In: 2011 International Conference on process automation, control and computing, pp 1–4. IEEE
Arya Y (2017) AGC performance enrichment of multisource hydrothermal gas power systems using new optimized FOFPID controller and redox flow batteries. Energy 127:704–715
Arya Y, Dahiya P, Çelik E, Sharma G, Gözde H, Nasiruddin I (2021) AGC performance amelioration in multiarea interconnected thermal and thermal-hydrogas power systems using a novel controller. Eng Sci Technol Int J 24(2):384–396
Boopathi D, Saravanan S, Jagatheesan K, Anand B (2021) Performance estimation of frequency regulation for a micro-grid power system using PSO-PID controller. Int J Appl Evol Comput (IJAEC) 12(2):36–49. https://doi.org/10.4018/IJAEC.2021040103
Boopathi D, Jagatheesan K, Anand B, Samanta S, Dey N (2023) Frequency regulation of interlinked microgrid system using mayfly algorithm-based PID controller. Sustainability 15(11):8829
Çelik E (2021) Design of new fractional order PI–fractional order PD cascade controller through dragonfly search algorithm for advanced load frequency control of power systems. Soft Comput 25(2):1193–1217
Das A, Shekhar Das H (2021) Applications of flower pollination algorithm in wireless sensor networking and image processing: a detailed study. In: Dey N (ed) Applications of flower pollination algorithm and its variants. Springer, Singapore, pp 197–220
Dhanasekaran B, Siddhan S, Kaliannan J (2020) Ant colony optimization technique tuned controller for frequency regulation of single area nuclear power generating system. Microprocess Microsyst 73:102953
Goli A, Ala A, Hajiaghaei-Keshteli M (2023) Efficient multiobjective meta-heuristic algorithms for energy-aware nonpermutation flow-shop scheduling problem. Expert Syst Appl 213:119077
Hu C, Bi L, Piao Z, Wen C, Hou L (2018) Coordinative optimization control of microgrid based on model predictive control. Int J Ambient Comput Intell (IJACI) 9(3):57–75
Jagatheesan K, Anand B, Dey N, Ashour AS, Balas VE (2018) Load frequency control of hydrohydro system with fuzzy logic controller considering nonlinearity. In: Zadeh LA, Yager RR, Shahbazova SN, Reformat MZ, Kreinovich V (eds) Recent developments and the new direction in soft-computing foundations and applications. Springer, Cham, pp 307–318
Jagatheesan K, Anand B, Samanta S (2021a) Flower pollination algorithm tuned PID Controller for Multisource Interconnected Multiarea Power System. In: Dey N (ed) Applications of flower pollination algorithm and its variants. Springer, Singapore, pp 221–239
Jagatheesan K, Samanta S, Boopathi D, Anand B (2021b) Frequency stability analysis of microgrid interconnected thermal power generating system with GWO tuned PID controller. In 2021b 9th IEEE International Conference on power systems (ICPS), pp 1–5. IEEE
Khadanga RK, Satapathy JK (2015) A new hybrid GA–GSA algorithm for tuning damping controller parameters for a unified power flow controller. Int J Electr Power Energy Syst 73:1060–1069
Khadanga RK, Satapathy JK (2015) Time delay approach for PSS and SSSC based coordinated controller design using hybrid PSO–GSA algorithm. Int J Electr Power Energy Syst 7:262–273
Khadanga RK, Padhy S, Panda S, Kumar A (2018) Design and analysis of tilt integral derivative controller for frequency control in an islanded microgrid: a novel hybrid dragonfly and pattern search algorithm approach. Arab J Sci Eng 43(6):3103–3114
Khamies M, Magdy G, Ebeed M, Kamel S (2021) A robust PID controller based on linear quadratic Gaussian approach for improving frequency stability of power systems considering renewables. ISA Trans 117:118–138
Kumarakrishnan V, Vijayakumar G, Boopathi D, Jagatheesan K, Anand B (2020) Optimized PSO technique based PID controller for load frequency control of single area power system. Solid State Technol 63(5):7979–7990
Lal DK, Barisal AK (2017) Comparative performances evaluation of FACTS devices on AGC with diverse sources of energy generation and SMES. Cogent Eng 4(1):1318466
Lal DK, Barisal AK, Tripathy M (2016) Grey wolf optimizer algorithm based fuzzy PID controller for AGC of multiarea power system with TCPS. Proc Comput Sci 92:99–105
Milani AE, Mozafari B (2011) Genetic algorithm based optimal load frequency control in two area interconnected power system. Global J Technol Optimiz 2:6–10
Mohanty B, Acharyulu BVS, Hota PK (2018) Moth-flame optimization algorithm optimized dual-mode controller for multiarea hybrid sources AGC system. Optimal Control Appl Methods 39(2):720–734
Nagrath J, Kothari DP (1994) Power System Engineering. Tata Mc-Graw Hill Publishing Company Limited, New Delhi
Naidu K, Mokhlis H, Bakar AHA (2013) Application of Firefly Algorithm (FA) based optimization in load frequency control for interconnected reheat thermal power system. In: 2013 IEEE Jordan Conference on applied electrical engineering and computing technologies (AEECT), pp 1–5. IEEE
Nayak PC, Rath S, Prusty RC (2020) Performance Analysis of different FACTS devices using Grey Wolf Optimization algorithm PDF plus (1+ PI) controller based multiarea AGC system. In: 2020 International Conference on renewable energy integration into smart grids: a multidisciplinary approach to technology modelling and simulation (ICREISG), pp 143–148. IEEE
Niu P, Niu S, Chang L (2019) The defect of the Grey Wolf optimization algorithm and its verification method. Knowl-Based Syst 171:37–43
Padhan S, Sahu RK, Panda S (2014) Application of firefly algorithm for load frequency control of multiarea interconnected power system. Electr Power Compon Syst 42(13):1419–1430
Padhy S, Panda S, Mahapatra S (2017) A modified GWO technique based cascade PI-PD controller for AGC of power systems in presence of plug in electric vehicles. Eng Sci Technol Int J 20(2):427–442
Prasad S, Purwar S, Kishor N (2017) Nonlinear sliding mode load frequency control in multiarea power system. Control Eng Pract 61:81–92
Pushpa R, Siddappa M (2021) An optimal way of Vm placement strategy in cloud computing platform using ABCS algorithm. Int J Ambient Comput Intell (IJACI) 12(3):16–38
Sahu RK, Panda S, Padhan S (2015) A novel hybrid gravitational search and pattern search algorithm for load frequency control of nonlinear power system. Appl Soft Comput 29:310–327
Shabani H, Vahidi B, Ebrahimpour M (2013) A robust PID controller based on imperialist competitive algorithm for load-frequency control of power systems. ISA Trans 52(1):88–95
Shaker HK, El Zoghbv H, Bahgat ME, Abdel-Ghany AM (2020) Load frequency control for an interconnected multi areas power system based on optimal control techniques. In 2020 12th International Conference on Electrical Engineering (ICEENG), pp 62–67. IEEE
Yousef HA, AL-Kharusi K, Albadi MH, Hosseinzadeh N (2014) Load frequency control of a multiarea power system: an adaptive fuzzy logic approach. IEEE Trans Power Syst 29:1822–1830
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
KJ: model development, and writing—original draft. DB: visualization, and writing—original draft. SS: data curation and software tool support, BA: validation, and writing—review & editing, and ND: validation and supervision.
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare that they have no conflicts of interest.
Ethical approval
No ethical approval was needed.
Informed consent
Consent is not required for this article.
Human and animal rights statement
This article does not contain any studies with human participants or animals performed by any of the authors.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix 1: (Arya 2017; Ali et al. 2012; Kumarakrishnan et al. 2020; Nagrath and Kothari 1994)
Appendix 1: (Arya 2017; Ali et al. 2012; Kumarakrishnan et al. 2020; Nagrath and Kothari 1994)
Prt = 2000 MW; B1 = B2 = B3 = 0.4312 p.u.; R1 = R2 = R3 = 2.4 Hz/p.u.; MW/Hz; TSG = 0.08 s; TR = 10 s; TP1 = TP2 = TP3 = 20 s; TW = 1 s; TRH = 28.75 s; T12 = 0.545; TT1 = 0.5 s; TRH1 = 7 s; TRH2 = 9 s. KR = 0.3; MW; a12 = – 1; KHI = 2; KR1 = 0.3; PL = 1840 MW; TRS = 5 s; Tt = 0.3 s; TGH = 0.21 s; KP1 = KP2 = KP3 = 120 Hz/p.u.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Jagatheesan, K., Boopathi, D., Samanta, S. et al. Grey wolf optimization algorithm-based PID controller for frequency stabilization of interconnected power generating system. Soft Comput 28, 5057–5070 (2024). https://doi.org/10.1007/s00500-023-09213-6
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00500-023-09213-6