
Abstract
Mobile robot path planning problem is a significant research area in industrial automation, which is to determine an optimal path for a robot to reach the destination by avoiding obstacles. Path planning (PP) is one of the most researched topics in mobile robotics. Deriving an optimal path from a huge number of feasible paths for a given environment is called a PP problem. The existing optimization techniques are used to consider path safety, path length, and path smoothness. The conventional optimization techniques implemented for the mobile robot path planning problem incur a lot of cost due to the high complexity to solve. In order to find the optimal path for handling the mobile robot path planning problem, the mobile robot path search based on multi-objective genetic algorithm (MRPS-MOGA) is proposed. The MRPS-MOGA is designed with the novelty of genetic algorithm with multiple objective function to solve mobile robot path planning problems. Hence the proposed MRPS-MOGA handles five different objectives such as safety, distance, smoothness, traveling time, and collision-free path to obtain optimal path. The MOGA is applied to select an optimal path among multiple as well as feasible paths. The population with feasible paths is initialized with randomly generated paths. The fitness value is evaluated for the number of available candidate paths by applying objective functions for different objectives. Then the fitness criterion determines the paths which are to be passed to participate in the next generation. MRPS-MOGA is developed with the novelty of genetic algorithms such as tournament selection, ring crossover, and adaptive bit string mutation for discovering the optimal path. For the successive generations, the population is selected using the tournament. The genetic operator, crossover operator, is applied for swapping the input string to obtain offspring which is called ring crossover. Consequently, another GA operator mutation is carried out randomly on the sequence to achieve diversity in the population. Again the individual fitness criterion is verified to obtain an optimal path from the population. An experimental study of the proposed MRPS-MOGA is carried out with different cases. The result reveals that the proposed MRPS-MOGA is better in the case of optimal path selection with lower time complexity. Based on the experimental analysis, MRPS-MOGA is a more efficient mobile robot path with higher safety, reduced energy consumption, lesser traveling time than the existing methods.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Robotics is the most significant researches in recent technology. Finding an optimal path for a robot is an essential task in robot motion planning. A robot that needs to move in a particular environment to carry out a definite task is the path planning (PP) problem. Mobile robot path planning is playing a significant role in the automobile industry, underwater vehicles, and airport terminals. Based on these applications and the robot's ability, various objectives are defined in multi-objective mobile robot path planning. Therefore, an optimal motion planning of the mobile robot is performed along with multi-objective optimization; it discovers an optimal path to reach the destination.
A novel multi-objective evolutionary technique based on the Variable Neighborhood Search (MOVNS) was developed in Hidalgo-Paniagua et al. (2016) to resolve the path planning issue. The technique is failed to calculate paths in dynamic environments since it only considers static environments. Randomized Homotopy Classes Finder (RHCF) was introduced in Palmieri et al. (2017) to discover various paths among dynamic obstacles depending on weighted random walks. The time complexity of the algorithm was not reduced and failed to generate a more robust path by considering sensing and motion uncertainty.
Dijkstra's algorithm was designed in Mac et al. (2017) to discover a collision-free path using particle swarm optimization with minimum path length and maximize path smoothness. The optimization technique discovers an optimal path with more execution time.
An evolutionary approach combined with the Artificial Bee Colony algorithm was introduced in Contreras-Cruz et al. (2015) to overcome the path planning problem of a mobile robot using a set of local procedures. The evolutionary approach failed to use an efficient mutation operator in the global path optimization phase for finding optimal probability values. A novel conflict resolution method was developed in Shahriari and Biglarbegian (2018) for several mobile robots while guaranteeing motion liveness in dynamic environments. The method failed to focus on considering the dynamics of mobile robots' path planning.
A path tracking technique was developed in Chen et al. (2016) for the wheeled mobile robot (WMR) using a B-spline algorithm to generate a smooth and obstacle-avoidance path with minimum collision. The path tracking method failed to predict the next position of the obstacle in a dynamic environment. A geodesic-based path planning algorithm was developed in Wu et al. (2016) for evading an obstacle on a 3D terrain. An optimal path planning was not carried out with minimum time.
In (Zhao et al. 2016), an ACO algorithm was introduced for path planning of the mobile vehicle to link the start and endpoint with obstacles. The ant colony algorithm failed to consider more objectives for path planning. An Invasive Weed Optimization (IWO) technique was introduced in Mohanty and Parhi (2014) for optimal route planning of the mobile robot in various challenging environments. This approach failed to handle dynamic obstacles with a complex environment and various mobile robots were not considered instead of a single robot.
A new framework was introduced in Hyun et al. (2017) for avoiding the problem of optimal path planning of rectangular robots. The comparisons between the proposed and the existing approach did not show the difference in the computation time and the feasibility.
The certain issues are determined from the above-said works of literature such as high time complexity, failed to select an optimal path with minimum time, failed to predict the position of the robot with multiple objectives and so on. To overcome the above said issues in mobile path planning, motivated by, MRPS-MOGA is introduced.
The major contribution of the MRPS-MOGA approach is described as follows:
-
The main contribution of MRPS-MOGA is developed to solve the mobile robot path planning problem and finds the optimal path. The MRPS-MOGA handles five diverse objectives namely path distance, smoothness of the path, collision-free path, safety, and travelling time while avoiding obstacles to achieve an accurate and efficient mobile robot path. The paths are randomly generated as a population to employ the proposed MRPS-MOGA technique. Based on the fitness values derived from the fitness functions for the multiobjective of the population, an optimal path is selected among the feasible paths. The paths which are satisfying the above-mentioned objectives are promoted to the next generation of population.
-
MRPS-MOGA is designed with the novelty of a genetic algorithm namely tournament selection, ring crossover, and adaptive bit string mutation to find the optimal path. Tournament selection is applied to select the best individual path from the population to satisfy the fitness criterion. The Ring crossover is employed to swap the strings for generating new adapted ones to determine a near-optimal path. Adaptive bit string mutation is to randomly interchange the bit. Next, the fitness criterion is checked again to find optimal solutions. If the criterion is satisfied, then the path is chosen as optimal with minimum time. Therefore, improving the mobile path planning performance.
The rest of the paper is ordered as follows: Sect. 2 introduces the background and reviews the related works. Section 3 provides a brief description of the proposed MRPS-MOGA with a neat diagram. In Sect. 4, experimental evaluation is presented with a dataset and the analysis of results is explained in Sect. 5. The performance result discussion is explained in Sect. 6. Concluding remarks of the paper are presented in Sect. 7.
2 Related works
A particle swarm optimization (PSO) algorithm was designed in Ever (2017) to avoid the problem of mobile robot path planning. The efficiency of mobile robot path planning was not improved using PSO algorithm. An off-line Kinect-based optimal collision-free path planning was carried out in Bakdi et al. (2017) for obtaining collision-free smoothed path. The approach was not validated in non-static obstacles.
Curvature-bounded traversability analysis (CBTA)was performed in Cowlagiand and Tsiotras (2014) for mobile robot motion planning through model predictive control. The analysis was not carried with multiple objective functions for path planning problem. In (Wei et al. 2012), a staying-alive and energy-efficient path planning algorithm (SLEEP) was introduced for path planning of mobile robots with minimum energy consumption. The SLEEP algorithm was not implemented stay-alive obstacle prevention.
A neural network approach provided with statistical dimension reduction methods was developed in Shamsfakhr and Sadeghibigham (2017) to perform exact and rapid robot direction-finding and also avoid the obstacles. The neural network method was not selecting an optimal route path with multiple objective functions. A Dynamic Window Approach (DWA) was introduced in Henkel et al. (2016) for mobile robot path planning with minimum energy consumption using a linear regression model. The approach failed to handle energy-efficient path planning.
An improved artificial fish swarm algorithm (IAFSA) was introduced in Zhang et al. (2016) for detecting the path of the mobile robot in a real environment. The IAFSA was not considered multi-objective optimization. A bacterial foraging technique was developed in Liang et al. (2013) for robot path planning to discover an optimal collision-free path in the environment with obstacles. The model failed to use multi-objective optimizer for searching the optimal path.
Bellman’s dynamic programming (DP)-based path planning of a robot was developed in Korayem and Nekoo (2016) to find the best path by minimizing energy and preventing obstacle collision. These techniques were not efficiently selected as an optimal path with multiple objectives. A self-adaptive learning particle swarm optimization (SLPSO) technique was developed in Li and Chou (2018) for solving the problem of mobile robot path planning. This optimization technique failed to reduce the travelling time of a mobile robot.
Hybridized Particle Swarm Optimization-Modified Frequency Bat (PSO-MFB) algorithm was introduced in Ajeil et al. (2020) for mobile robot path planning problems. An improved particle swarm optimization (IPSO) with evolutionary operators (EOPs) was developed in Das and Jena (2020) for creating an optimal collision-free path. An efficient Q-Learning (EQL) algorithm was introduced in Maoudj and Hentout (2020) to ensure the collision-free path with minimum time. The designed EQL algorithm failed to improve the efficiency of the mobile robot path.
3 Mobile robot path search based on multi-objective genetic algorithm
An efficient and reliable path planning strategy is a great benefit to mobile robots by adopting with multi-objective optimization principle. The mobile robot path planning is a significant problem in mobile robotics for discovering between two specified locations namely start and endpoint. Therefore, the mobile robot has to discover an optimal path with multiple objective functions are minimum path length (i.e. distance), safety, collision-free path, travelling time, and energy consumption are taken between to navigate over the path. According to these criteria, the path planning problem is considered an optimization problem. Based on this motivation, MRPS-MOGA is introduced. The mobile robot path planning strategy is shown in Fig. 1.

Mobile robot path planning
As shown in Fig. 1, the mobile robot path planning strategy is described. In general, several feasible paths \(P_{1} ,P_{2} , \ldots ,P_{n}\) are available between source and destination points. Among the several paths, the mobile robot chooses an optimal path for reaching its target point with minimum time. Therefore, the PP issue plays a major role to control a mobile robot motion in a certain environment which has static obstacles. From the figure, three different paths \(P_{1} ,P_{2} ,P_{3}\) are taken as sample paths for the given environment. The start point of the mobile robot is represented as \(A\) and the endpoint is denoted as \( B\). Among these three paths, the mobile robot (MR) path planning satisfies some criteria are path distance, path smoothness, collision-free path, safety and travelling time. Therefore, MR has to discover an optimal path which reduces the number of steps to be taken to reach the destination. The proposed MRPS-MOGA aims to improve path optimization with the above said multiple objectives with less complexity. An flow process of the MRPS-MOGA is shown in Fig. 2.

flow process of the MRPS-MOGA
Figure 2 shows an flow process of the MRPS-MOGA to select an optimal mobile robot path in an environment. By applying a meta-heuristic mobile robot path search-based multi-objective genetic algorithm, the n number of gene population is initialized. After that, the fitness function is calculated based on multiple objective functions namely as path distance, path smoothness, safety, travelling time, and collision-free path. Then, the multiple objective functions are measured based on the fitness function. Subsequently, the path which satisfies the above fitness criterion (i.e., higher safety, minimum path distance, path smoothness, travelling time, and collision-free path) is selected as MR optimal path to reach the endpoint for robot movement. The path does not satisfy the fitness criterion; then the MRPS-MOGA utilizes bio-inspired operators such as tournament selection, ring crossover, and adaptive bit string mutation. After applying these parameters, the fitness criterion is verified. This procedure is continued until one optimal path is chosen for the mobile robot. A brief description of the MRPS-MOGA is presented in the forthcoming sections.
3.1 Description of MRPS-MOGA
A new MRPS-MOGA is designed to overcome the path planning problem. MRPS-MOGA performs meta-heuristic-based mobile robot path search where a meta-heuristic is a higher-level process to find a heuristic (i.e. partial search) that provides a sufficiently best solution for mobile robot path optimization problem. It is employed to search the optimal path of the mobile robot. The search-based multi-objective genetic algorithm is used in MRPS-MOGA for obtaining a better solution. The first step in the functioning of an MRPS-MOGA is the generation of an initial population. A population of candidate solutions also termed as an individual (i.e. path) is selected. The candidate solution comprises a set of properties (i.e. chromosomes) that are mutated and changed. The initial population of paths for a mobile robot is denoted as,
From the above equations, the population is generated randomly. After the mobile robot paths population initialization, the fitness function of each individual (i.e. path) is determined based on the five objective functions. The fitness function is an objective function that is used for path planning optimization. The fitness of the individual path is measured based on multiple objective functions as follows:
From (2), \(FF\) denotes a fitness function with five objective functions as minimum distance, smoothness of the path (related to energy consumption), collision-free path \(\left( {{\text{CFP}}} \right)\), safety and \({\text{min}}\left( { {\text{TT}}} \right)\) denotes a least travelling time of mobile robot to reach the goal.
3.1.1 Path distance
The first objective function of the MRPS-MOGA is a path distance. During the optimal path finding, the shortest path from the starting point to the endpoint is selected. For this reason, the path distance objective function is considered for mobile robot path planning problem. The distance among start and endpoint are computed using Manhattan distance. The Manhattan distance is so appropriate for the grid based applications instead of geometric distance between the given points in the environment. Manhattan distance is the summation of the differences of their related coordinates. Given two dimensional vector, the distance is measured as follows:
From (3),\( D\left( {A,B} \right)\) denotes a distance between the two points of the path. a and b denote a coordinate in two-dimensional vector. The mobile robot selects the path with the minimal distance which is expressed as follows:
Based on the equation, the shortest distance path is selected for mobile robot motion.
3.1.2 Smoothness of path
The second objective function is the path smoothness which is measured based on energy consumption. Path smoothness is an objective that is directly related to the robot's energy consumption. The energy consumption of the mobile robot is an important issue for the mobile robot path. The smoothness of the path is also maximized by reducing the number of turns over the robot navigational path. Generally, the mobile robot is moved in the direction of forward, backward, right and left. During the motion of the mobile robot in an environment, the several obstacles may exist in an environment. If more obstacles are present in a path, energy consumption is increased. In order to handle the smoothness of the path and measured it in terms of energy consumption. By minimizing the number of obstacles on the desired path, the energy consumption is minimized. The robot has to interact with the obstacles present in the environment. The obstacles are objects that create challenges in the direction of movement of the mobile robot. The energy consumption of the path is reduced by obtaining with least distance between the robot and the obstacles. In order to calculate the smoothness of a particular path, the number of obstacles in a path is minimized. Also, it reduces energy consumption. It is measured in terms of a joule.
From (5), \({\text{EC}} \left( t \right)\) denotes energy consumed for mobile robot path planning. \(D_{A}\) denotes a distance of starting point and its proximate obstacle \( (O_{i} )\). By minimizing the number of obstacles on the desired path, the energy consumption is minimized.
3.1.3 Collision free path
One of the significant objectives is to derive a path for the robot movement which interacts with the minimum number of obstacles in the environment. By reducing the collision with obstacle, energy consumption and time to reach the goal also get reduced. Hence, the problem is solved by determining the collision-free path that satisfies the chosen criteria for shortest distance and path smoothness. The path smoothness is directly related to the robot energy consumption. In order to calculate the smoothness of a particular path, the number of obstacles in a path is minimized. Based on obstacles avoidance, the multi-objective collision-free path is obtained.
3.1.4 Safety
Safety is the major objective in mobile robot path planning problem. During the navigation of a mobile robot, safety is an essential objective to protect the robot by means of reducing the number of obstacles and collisions along the path. The robot has to be guarded against the collision with obstacle. The path which has the minimum number of obstacles and minimum collisions chooses the available path to ensure the physical safety of the robot.
3.1.5 Travelling time
Travelling time represents the total time consumed by a mobile robot to reach the target from the source. It is measured as follows:
From (6),\({\text{TT}}\) denotes a travelling time at which the mobile robot arrives at the end point \((T_{B}\)) from the starting point (\(T_{A} )\).
Based on the above objective functions, the fitness function is calculated for all the paths of the population. If the path satisfies all objective functions criterion, then the path is chosen for the next generation in the process of selection of optimal path. Otherwise, the MRPS-MOGA uses three bio-inspired operators such as selection, crossover and mutation. The processes of the genetic operators in the genetic algorithm are explained. The genetic algorithm uses tournament selection, ring crossover, and adaptive bit string mutation operation. At first, the tournament selection is carried out for selecting the paths that are satisfying fitness criteria. Next, the ring crossover is used for generating the offspring by swapping the bit string. Lastly, adaptive bit string mutation is employed to swap the bit of chromosome randomly, by using bio-inspired operators such as tournament selection, ring crossover, and adaptive bit string mutation for selecting the optimal path to improve the path planning performance.
3.1.5.1 Tournament selection
Selection is one of the bio-inspired operators for selecting an individual from a population as the principle of fittest one will survive among the population for the next generation. Tournament selection is the method for choosing an individual from the population with higher fitness in a random manner. For each tournament, the winner is chosen with the best fitness for crossover. Individual selection is utilized to generate consecutive generations. By applying the selection approach, the fitness of each individual is measured. The selection of each individual is carried out with their probability which is defined as follows:
From (7), selection probability (P) of every individual and \(FF_{i}\) denotes an average fitness of the population in \(j^{{{\text{th}}}}\) individual. Each generation fitness value and selection probability of each path get changed. It means the first suitable individual from the tournament is selected with probability (P). The next suitable individual selection probability is defined as,
The third best individual with probability is selected as,
Similarly, the entire best individuals are selected along with their selection probability. If the tournament size is high, weak individuals include a lesser possibility for tournament selection.
3.1.5.2 Ring crossover
The crossover is the process of handling more than one parent solutions and producing offspring through swapping process. The ring crossover operator is used in MRPS-MOGA for optimal mobile robot path selection. The ring operator consists of four steps for generating the offspring from the parent solution. At first step two-parent chromosomes \(a\) and \(b \) are defined.
Secondly, the chromosomes of parents are combined to form of a ring. Thirdly, a random cutting point is applied at any point of the ring. The one of the offspring is created in the clockwise direction; the other one is generated in an anticlockwise direction.
In the fourth steps, the offspring are obtained by the swapping of the two-parent chromosome.
As shown in Fig. 3, the process of ring crossover is described to generate offspring from parent solutions. The crossover is performed based on the combination of two well-defined parent solutions which provides the new adapted ones. As the string length of the ring is similar to the total string length of both parents and offspring are created along with a cut at random point of the ring. Crossover is a significant process which helps to discover an optimal robot path.

Ring crossover
For example, ring crossover is applied to the sequence (i.e. chromosome) for identifying the optimal path of the mobile robot. Let us consider the following sequence of decimal numbers 10, 32, 35, 41, 46, 50, 52, 55, 58, 60. The equivalent binary strings of these sequence are shown in Table 1.
Table 2 shows the offspring generation from two-parent chromosomes. In Table 2, let us consider the two parent chromosomes \(41,\, 26\); their equivalent binary strings are 101,001 and 011,010. A cut point is used in a random manner to generate two offspring; 001,010, 101,011 are generated. The new offspring 001,010 is selected, and the other 101,011 is discarded. These two offspring generated in two directions, i.e. clockwise and anticlockwise. These processes are explained briefly in Fig. 3.
After the two-point crossover, the two new offspring 001,010, 101,011 are generated and their decimal equivalents are 10 and 43, respectively. The generated offerings are verified with Table 1. The generated offspring 001,010, i.e. 10, is matched with the existing points of an equivalent binary string. This offspring is selected and it is more suitable to discover the optimal path for a mobile robot. The generated offspring 101,011, i.e. 43, does not match with the existing binary string of points and then this offspring is discarded. If two offspring does not match with the existing binary string of the points, then the other two points are taken for generating the new offspring. The selected offspring is used for adaptive bit string mutation to obtain optimal path for mobile robot among the several paths. As a result of the ring crossover, the process is not able to create diversity within a population of paths. Therefore, diversity is maintained by using another bio-inspired mutation operator.
3.1.5.3 Adaptive bit string mutation
After generating an offspring, adaptive bit string mutation operation is carried out to preserve genetic diversity from one generation of a population of chromosomes to the next generation. MRPS-MOGA uses adaptive bit string mutation which takes the resultant offspring and inverts the bits flips at random positions. A bit flip is a process of inverting the bit into the other value. By applying adaptive mean mutation, the formula is expressed as follows:
From (10),\(\hat{y}^{{\prime}}\) newly generated offspring value by inverting the bit from the population and \(\hat{y}\) represents an offspring created from a crossover. \(\sigma_{1}\) and \(\sigma_{2}\) are the standard deviation parameter. \(n \left( {0,1} \right)\) represents a Gaussian normally distributed random number with 0 mean and variance 1, and \(c\left( {0,1} \right)\) represents a cache operator. The bit flip process is performed as shown in Fig. 4.

Adaptive bit string mutation
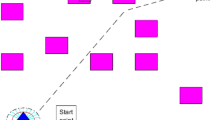
Figure 4 shows adaptive bit string mutation of offspring value of string ‘0’ is randomly changed with the exact chromosome string of ‘1’. A mutation is a randomly inverting a bit for generating the new offspring to select an optimal path for a mobile robot. After that, the previously selected individual is replaced by a new individual. Fitness criterion is verified again to obtain optimal solutions. This process is continued for all candidate paths in a population and discovers the most suitable path with the obstacle-free environment. Figure 5 shows the multi-objective optimal path for the mobile robot from the possible paths. This optimal path satisfies the fitness criterion than the other paths to get an optimal solution in mobile robot path planning.

Multi-objective optimal path for mobile robot
The algorithmic description of MRPS-MOGA is presented as follows.

The above algorithm 1 clearly describes the selection of the mobile robot’s path movements successfully to navigate over the environment by avoiding obstacles. The MRPS-MOGA is employed for determining an optimal path with multiple objective functions. At first, the numbers of paths population are initialized. After that, the multiple objective functions are calculated to measure the fitness of the individual path. The path satisfies the fitness criterion; then the path is selected as an optimal for a mobile robot. Or else, tournament selection is performed for selecting the best individual from the population with their probability. Then the swapping of the two chromosomes is carried out to generate the new offspring using ring crossover. Finally, the adaptive bit string mutation is performed to interchange the input bit string randomly. After performing genetic operators, the fitness of that path is calculated and checks the fitness criterion. Above said process is repeated till the specified condition is met. As a result, MRPS-MOGA finds an obstacle-free path to reach an endpoint.
4 Experimental settings
Experimental evaluation of MRPS-MOGA is implemented in Java language with Mobile Robots Data Set taken from UCI machine learning repository. (https://archive.ics.uci.edu/ml/datasets/Mobile+Robots). By using this dataset, movement of the mobile robot, direction and position of the mobile robot are identified in path planning. The dataset contains the certain attributes information such as trace, time, sensor orientation, gradient, distance, sensor coordinates, objects, edge, sensor class (set of front side, right side, backside, left side), movement of mobile robot (set of parallel, diagonal), mobile robot move direction, (forward, backward, right, left), perception direction (set of front, rear, right, left), perceptual features. This data set is employed to analyze the mobile robot path for selecting the obstacles free path.
The proposed MRPS-MOGA is evaluated with an existing multi-objective evolutionary approach based on the Variable Neighborhood Search (MOVNS) (Hidalgo-Paniagua et al. 2016) and Randomized Homotopy Classes Finder (RHCF) (Palmieri et al. 2017) in terms different constraints and various cases.
5 Result analyses
Result analysis of MRPS-MOGA is described in this section with the impact of four different cases for selecting an optimal path with Mobile Robots Data Set. The MRPS-MOGA is compared against the two existing methods namely MOVNS (Hidalgo-Paniagua et al. 2016) and RHCF (Palmieri et al. 2017). Experimental results are compared and analyzed with the help of the appropriate tables and charts.
-
Case 1: Path Distance versus Travelling Time
In this case, to guarantee the statistical importance of the obtained results, 10 separate runs are evaluated. In case 1, let us consider two different objectives, namely path distance and travelling time for mobile robot path planning. Most of the time this objective is directly related to the robot operation time; thus, a shorter path implies less time in order to move the mobile robot. The path distance D(A, B) is directly proportional to the travelling time that means if the distance of the path is high, then the mobile robot travelling time also increased.
From (11), \(D\left( {A, B} \right)\) denotes a path distance between two points A and B and \({\text{TT}}\) denotes a travelling time to reach the goal point. The path distance is measured in terms of a meter (m), and travelling time is calculated as milliseconds (ms). The performance of travelling time and different path distance with three different methods namely proposed MRPS-MOGA, existing MOVNS (Hidalgo-Paniagua et al. 2016), RHCF (Palmieri et al. 2017). The simulation results of these three methods are shown in Fig. 6.

Graphical presentations of path distance and travelling time
Figure 6 illustrates the graphical performances of path distance and travelling time with three different methods. In this case, the aim of path planning is to discover a collision-free optimal path between start and end points which satisfying the optimization criteria such as travelling distance and time. Let us consider, path distance is taken in ‘x’ axis and the travelling time of the robot is considered in ‘y’ axis. The obtained results are mapped into two-dimensional spaces for obtaining a clear vision of path distances versus travelling time.
An evaluation results for this case, MRPS-MOGA uses Manhattan distance for finding the path length from the start point (A) to endpoint (B). In two-dimensional vector space, the coordinates a, b are selected to measure the distance between the points. The start point A is the point where the mobile robot begins to move. The endpoint is also called a target point where the mobile robot to reach. The distance is calculated for all possible paths from which an optimal path is selected. In addition, the travelling time is defined as the difference between the times of mobile robot starts to move from the start point and it arrived at the endpoint. The distance of a path is directly related to the robot travelling time. Various paths are usually available in dynamic environments. Thus, the shortest path is chosen by the robot for reaching the destination with minimum travelling time. Let us consider path distance is measured as 120 m and the robot travelling time of that distance is 25 ms using proposed MRPS-MOGA. The existing MOVNS (Hidalgo-Paniagua et al. 2016) takes 36 ms and RCHF (Palmieri et al. 2017) takes 43 ms for travelling the distance of 120 m. Similarly, all the possible paths distance and mobile robot travelling time are calculated. Based on the distance and time calculation, an MRPS-MOGA searches the available paths to reach the target point with minimum distance. This shortest path is also selected by applying the multi-objective genetic algorithm. As a result, the mobile robot discovers an optimal path with minimum distance and travelling time. Thus results proved that the distance of path is related to the travelling time of the mobile robot.
-
From the results, MRPS-MOGA reduces the travelling time by 31% and 42% when compared to existing MOVNS (Hidalgo-Paniagua et al. 2016) and RCHF (Palmieri et al. 2017) respectively.
-
Case 2 Number of obstacles versus Path Smoothness
In case 2, the number of obstacles versus smoothness of the paths is considered for mobile robot path planning. During the movement of mobile robots, the obstacles presented in a path are determined for calculating the path smoothness. The smoothness of the path is measured in terms of energy consumption. If more obstacles present in a path, energy consumption is increased. The smoothness of the path is also obtained by reducing energy consumption. The number of obstacles versus path smoothness with three different methods MRPS-MOGA, MOVNS (Hidalgo-Paniagua et al. 2016) and RCHF (Palmieri et al. 2017) is shown in Table 3.
Table 3 shows the results of the number of obstacles versus path smoothness with three different methods MRPS-MOGA, MOVNS (Hidalgo-Paniagua et al. 2016) and RCHF (Palmieri et al. 2017). From the table, the first column refers to the number of obstacles presented in the path. The second, third and the fourth columns indicate the results obtained by the energy consumption of three methods to select the paths specified by the different cases. A number of obstacles in the path are represented in the x-axis, where the y axis refers to the energy consumption (i.e. path smoothness). In complicated environments, it generally contains the number of obstacles, whose position information is occasionally known whose position information is uncertain. In the concept of path planning, obstacles are reduced for the energy savings of mobile robots. When the path is free, then the energy consumption is said to be minimized. When the obstacles are present in the path, the mobile robot moves in different directions such as forward, backward, right, left. Subsequently, the number of steps gets increased. As a result, the energy utilization of the mobile robot also increased. In this case, optimal path planning was not achieved. During the movement of the mobile robot, the energy optimal path is selected for improving the mobile robot path planning in a certain environment. MRPS-MOGA selects the shortest path by using the multi-objective genetic algorithm. The energy consumption of the path is also reduced by obtaining the shortest path from a given position to the target end. From the table values, two obstacles in a path, the energy consumption is 112-J using MRPS-MOGA, whereas 132 J, 147 J of energy consumption is obtained by using MOVNS (Hidalgo-Paniagua et al. 2016) and RCHF (Palmieri et al. 2017). As a result, less number of obstacles is reduced energy consumption.
-
As a result, the percentage of energy consumption is minimized by 15% and 31% when compared to existing MOVNS (Hidalgo-Paniagua et al. 2016) and RCHF (Palmieri et al. 2017) respectively
-
Case 3 Path smoothness versus travelling time versus Path distance
In case 3, three different objective functions are described in mobile robot path planning. These three objectives are related to each other. When the distance to reach the target point from the source of a mobile robot is less, the travelling time of the robot and the energy consumption also reduced. If the path satisfies these objective functions, then this path is chosen as optimal for the motion of the mobile robot.
Table 4 shows the performance results of three objective functions namely Path smoothness versus travelling time versus Path distance. In this case, the results of the proposed MRPS-MOGA are improved than the existing methods MOVNS (Hidalgo-Paniagua et al. 2016) and RCHF (Palmieri et al. 2017). From the table, the first three columns represent path smoothness in terms of energy. The next three columns include travelling time of mobile robot and the last three columns represents a distance of path in meters for the corresponding methodologies. These three objective functions results are mapped into three-dimensional views and it is represented in Fig. 7.

Graphical representation of path smoothness versus travelling time versus path distance
As shown in Fig. 7, the graphical results of path smoothness versus travelling time versus path distance are measured. As shown in the figure, a three-dimensional view of the objectives is described with three different axis namely x, y, and z. The x-axis represents path smoothness and y-axis represents a travelling time of mobile robot for the navigation. z-axis represents a distance between the points. The three-dimensional view of the proposed MRPS-MOGA and existing methods MOVNS (Hidalgo-Paniagua et al. 2016) and RCHF (Palmieri et al. 2017) are shown in Fig. 7.
The path smoothness is an objective which is directly related to the robot energy consumption. In order to calculate the smoothness for a particular path, the number of obstacles in a path is minimized. Based on obstacles avoidance, the collision-free path is obtained. As a result, safety is increased and minimizes the complexity of the path planning. Let us consider, the distance is 123 m, the travelling time of the mobile robot is 29 ms, and their energy consumption is 115 J. The existing MOVNS (Hidalgo-Paniagua et al. 2016) technique obtains the energy consumption of 130 J and 35 ms travelling time with the path distance 135 m. Similarly, the existing RCHF (Palmieri et al. 2017) obtains the energy consumption is 145 J and travelling time of robot is 38 ms with the path distance is 144 m. Regarding the associated interquartile range values, the results obtained by applying the MRPS-MOGA are better than the two existing methods MOVNS (Hidalgo-Paniagua et al. 2016) and RCHF (Palmieri et al. 2017). In these cases, the results obtained by applying the MRPS-MOGA are generally more reliable in terms of path smoothness, travelling time and path distance.
-
Case 4 Number of iterations versus time complexity
Time complexity is defined as an amount of time required to derive an optimal path by employing multiple objective functions and for implementing genetic algorithm operators, such as crossover, mutation and selection operators. The time complexity of this algorithm is expressed as follows which depends on the population size,
From (12), \({\text{TC}}\) denotes a time complexity, n denotes a number of paths in the generated population. For each iteration, the number of possible paths is detected with multiple objectives. From the available paths, an optimal path is selected. The experimental results of time complexity are considerably reduced using MRPS-MOGA when compared to existing MOVNS (Hidalgo-Paniagua et al. 2016) and RCHF (Palmieri et al. 2017) are illustrated in Fig. 8.

Graphical results of Number of iterations versus time complexity
Figure 8 depicts the graphical results of the number of iterations versus time complexity with three different methods namely, MRPS-MOGA and existing MOVNS (Hidalgo-Paniagua et al. 2016) and RCHF (Palmieri et al. 2017). As shown in the figure, it is clearly evident that the time complexity for path planning is considerably reduced than the existing methods. This is because of MRPS-MOGA performs efficient mobile robot optimal path search with multiple objectives. At first, the population of the multiple paths is initialized for selecting the optimal one. Then the fitness of each individual is measured with five objective functions such as high path security, minimum path distance, minimum energy consumption, collision-free path and least travelling time. If the path satisfies these fitness criteria then it is selected as an optimal. If the path does not satisfy these fitness criteria, tournament selection is performed to select the best individual from the population. After that, the ring crossover is carried out to obtain the best offspring’s. Finally, adaptive bit string mutation is performed for inverting the bit randomly. Once the mutation is performed, the fitness value for the path is determined. If the criterion is satisfied, then the path is selected as an optimal with minimum time.
-
As a result, the time complexity using proposed MRPS-MOGA is considerably reduced by 20% and 33% when compared to existing MOVNS (Hidalgo-Paniagua et al. 2016) and RCHF (Palmieri et al. 2017) respectively.
As a result, MRPS-MOGA effectively solves the mobile robot path planning by using search-based optimization.
6 Performance result discussion
This study compares the proposed MRPS-MOGA with the existing MOVNS (Hidalgo-Paniagua et al. 2016) and RHCF (Palmieri et al. 2017) using Mobile Robots Data Set datasets based on various parameters, such as travelling time, path smoothness, path distance, and time complexity. The MRPS-MOGA is developed to solve the path planning problem and finds an efficient mobile robot path. The multiple objectives namely path distance, path smoothness, safety, travelling time and the collision-free path is considered for mobile robot path planning. The distance of a path is directly connected to the robot's travelling time. MRPS-MOGA is used to select the shortest path with aid of a multi-objective genetic algorithm for reducing the travelling time. The travelling time is minimized using proposed MRPS-MOGA by 31% and 42% as compared to existing MOVNS (Hidalgo-Paniagua et al. 2016) and RCHF (Palmieri et al. 2017), respectively. The path smoothness is computed in energy consumption. The energy optimal path is chosen to enhance the mobile robot path planning. MRPS-MOGA is applied for choosing the shortest path with minimum energy consumption. The energy consumption is minimized by using the proposed MRPS-MOGA by 15% and 31% as compared to existing MOVNS (Hidalgo-Paniagua et al. 2016) and RCHF (Palmieri et al. 2017) respectively. Time complexity is an important issue in mobile robot paths. MRPS-MOGA is developed with aid of genetic algorithm operators namely crossover, mutation, and selection operators to reduce the time complexity. Time complexity is minimized using proposed MRPS-MOGA by 20% and 33% as compared to existing MOVNS (Hidalgo-Paniagua et al. 2016) and RCHF (Palmieri et al. 2017) respectively.
7 Conclusion
This paper proposed an efficient algorithm called mobile robot path search-based multi-objective genetic algorithm (MRPS-MOGA) which is introduced to find the optimized path with multi-objectives by randomly generated population of paths. The proposed MRPS-MOGA handles five different objectives namely path distance, smoothness of the path, collision-free path, safety, and travelling time. The fitness is determined by using a multiobjective function in dynamic environments. The path which satisfies the fitness criterion is chosen as optimal for robot movement. Or else, the MRPS-MOGA employs bio-inspired operators namely tournament selection, ring crossover, and adaptive bit string mutation for verifying the fitness criterion. As a result, MRPS-MOGA determines the obstacle-free path. The experimental evaluation is performed with a mobile robot dataset to show the performance of the proposed MRPS-MOGA and existing methods by using different performance parameters such as path distance, smoothness of the path, travelling time, and time complexity. In the context of the performance results, it can be concluded that the proposed MRPS-MOGA selected the optimal robot path with minimum time complexity as compared to state-of-the-art approaches. In future work, a novel optimization technique with more multiobjective parameters is used for handling the mobile robot path planning problem.
References
Ajeil FH, Ibraheem IK, Sahib MA, Humaidi AJ (2020) Multi-objective path planning of an autonomous mobile robot using hybrid PSO-MFB optimization algorithm. Appl Soft Comput J 80:1–27. https://doi.org/10.1016/j.asoc.2020.106076 (Elsevier)
Bakdi A, Hentout A, Boutami H, Maoudj A, Hachour O, Bouzouia B (2017) Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control. Robot Auton Syst 89:95–109. https://doi.org/10.1016/j.robot.2016.12.008
Chen W, Jhong B, Chen M (2016) Design of path planning and obstacle avoidance for a wheeled mobile robot. Int J Fuzzy Syst 18(6):1080–1091. https://doi.org/10.15623/ijret.2013.0206009 (Springer)
Contreras-Cruz MA, Ayala-Ramirez V, Hernandez-Belmonte UH (2015) Mobile robot path planning using artificial bee colony and evolutionary programming. Appl Soft Comput 30:319–328. https://doi.org/10.1016/j.asoc.2015.01.067 (Elsevier)
Cowlagiand RV, Tsiotras P (2014) Curvature-bounded traversability analysis in motion planning for mobile robots. IEEE Trans Robot 30(4):1011–1019. https://doi.org/10.1109/TRO.2014.2315711
Das PK, Jena PK (2020) Multi-robot path planning using improved particle swarm optimization algorithm through novel evolutionary operators. Appl Soft Comput J 92:1–24. https://doi.org/10.1016/j.asoc.2020.106312 (Elsevier)
Ever YK (2017) Using simplified swarm optimization on path planning for intelligent mobile robot. Proce Comput Sci 120:83–90. https://doi.org/10.1016/j.procs.2017.11.213 (Elsevier)
Henkel C, Bubeck A, Xu W (2016) Energy-efficient dynamic window approach for local path planning in mobile service robotics. IFAC Pap Online 49(15):32–37. https://doi.org/10.1016/j.ifacol.2016.07.610 (Elsevier)
Hidalgo-Paniagua A, Vega-Rodríguez MA, Ferruz J (2016) Applying the MOVNS (multi-objective variable neighbourhood search) algorithm to solve the path planning problem in mobile robotics. Expert Syst Appl 58:20–35. https://doi.org/10.1016/j.eswa.2016.03.035 (Elsevier)
Hyun NP, Vela PA, Verriest EI (2017) A new framework for optimal path planning of rectangular robots using a weighted Lp norm. IEEE Robot Autom Lett 2(3):1460–1465. https://doi.org/10.1109/LRA.2017.2673858
Korayem MH, Nekoo SR (2016) The SDRE control of mobile base cooperative manipulators: collision free path planning and moving obstacle avoidance. Robot Auton Syst 86:86–105. https://doi.org/10.1016/j.robot.2016.09.003 (Elsevier)
Li G, Chou W (2018) Path planning for mobile robot using self-adaptive learning particle swarm optimization. Sci China Inf Sci 61:1–18. https://doi.org/10.1007/s11432-016-9115-2 (Springer)
Liang X, Li L, Wu J, Chen H (2013) Mobile robot path planning based on adaptive bacterial foraging algorithm. J Cent South Univ 20(12):3391–3400. https://doi.org/10.1007/s11771-013-1864-5 (Springer)
Mac TT, Copot C, Tran DT, De Keyser R (2017) A hierarchical global path planning approach for mobile robots based on multi-objective particle swarm optimization. Appl Soft Comput 59:68–76. https://doi.org/10.1016/j.asoc.2017.05.012
Maoudj A, Hentout A (2020) Optimal path planning approach based on Q-learning algorithm for mobile robots. Appl Soft Comput J 97:1–21. https://doi.org/10.1016/j.asoc.2020.106796 (Elsevier)
Mohanty PK, Parhi DR (2014) A new efficient optimal path planner for mobile robot based on Invasive Weed Optimization algorithm. Front Mech Eng 9(4):317–333. https://doi.org/10.1007/s11465-014-0304-z (Springer)
Palmieri L, Rudenko A, Arras KO (2017) A Fast randomwalk approach to find diverse paths for robot navigation. IEEE Robot Autom Lett 2(1):269–276. https://doi.org/10.1109/LRA.2016.2602240
Shahriari M, Biglarbegian M (2018) A new conflict resolution method for multiple mobile robots in cluttered environments with motion-liveness. IEEE Cybern 48(1):300–311. https://doi.org/10.1109/TCYB.2016.2633331
Shamsfakhr F, Sadeghibigham B (2017) A neural network approach to navigation of a mobile robot and obstacle avoidance in dynamic and unknown environments. Turk J Electr Eng Comput Sci 25:1629–1642. https://doi.org/10.3906/elk-1603-75
Wei H, Wang B, Wang Y, Shao Z, Chan KCC (2012) Staying-alive path planning with energy optimization for mobile robots. Expert Syst Appl 39:3559–3571. https://doi.org/10.1016/j.eswa.2011.09.046 (Elsevier)
Wu K, Ho T, Huang SA, Lin K, Lin Y, Liu J (2016) Path planning and replanning for mobile robot navigation on 3d terrain: an approach based on geodesic. Math Probl Eng 2016:1–12. https://doi.org/10.1155/2016/2539761 (Hindawi Publishing Corporation)
Zhang Y, Guan G, Pu X (2016) The robot path planning based on improved artificial fish swarm algorithm. Math Probl Eng 2016:1–11. https://doi.org/10.1155/2016/3297585 (Hindawi Publishing Corporation)
Zhao J, Cheng D, Hao C (2016) An improved ant colony algorithm for solving the path planning problem of the omnidirectional mobile vehicle. Math Probl Eng 2016:1–10. https://doi.org/10.1155/2016/7672839 (Hindawi Publishing Corporation)
Acknowledgements
There is no acknowledgement involved in this work
Funding
No funding is involved in this work.
Author information
Authors and Affiliations
Contributions
There is no authorship contribution.
Corresponding author
Ethics declarations
Conflict of interest
Conflict of interest is not applicable in this work.
Ethics approval and consent to participate
No participation of humans takes place in this implementation process.
Human and animal rights
No violation of human and animal rights is involved.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Suresh, K.S., Venkatesan, R. & Venugopal, S. Mobile robot path planning using multi-objective genetic algorithm in industrial automation. Soft Comput 26, 7387–7400 (2022). https://doi.org/10.1007/s00500-022-07300-8
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00500-022-07300-8