
Abstract
The use of fiber-reinforced polymer (FRP) to strength the concrete beams is an efficient method in retrofitting of preexisting structures. The application of FRP sheets makes to have higher shear strength, but the common equations in determining the shear strength are no longer effective. In this paper, a new formulation is presented to predict the shear contribution of FRP in strengthened reinforced concrete beams. The formula is produced using the multigene genetic programming (MGP) machine. For this purpose, a set of experimental data is collected from the literature. The shear capacity of FRP in reinforced concrete (RC) beams is considered as the output data, while other variables are considered as the input data. MGP is trained with the experimental data and a formula is produced. The results of the proposed formula are compared with the experimental data to show the ability of the proposed formula. Also, these results are compared with those obtained from the available formulas, approximation models and published researches. Results show that the proposed formula is able to predict the shear capacity of FRP in strengthened RC beams with a higher precision than the other evaluated methods such as CIDAR, Fib.TG9.3, ACI and CSA. The mean absolute percentage error for the MGP formula was reduced about 74% in comparison with the CIDAR equations. Also, the root-mean-squared-error of the MGP formula was decreased near 71% in comparison with the Fib.TG9.3 equations.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Design of non-strengthened reinforced concrete (RC) members is an interesting problem for researchers since there are different approaches to their analysis and design. To design non-strengthened RC members, designers should consider two important parameters: shear and flexural failures. When the internal shear forces in RC beams become large, it could lead to shear destruction, and therefore an abrupt brittle fracture might occur. This type of failure is not intended by designers. In fact, when the internal shear force is larger than the flexural ones, the shear strengthening of RC structures has an essential role to stop the shear destruction. Therefore, the measurement of the shear capacity of RC is an important factor to select a suitable method for the strengthening of RC structures (Naderpour and Alavi 2017).
Fiber-reinforced polymer (FRP) is a combination of high-strength fibers and matrix. The matrix binds these fibers to fabricate structural shapes. There are four common fiber types: aramid (AFRP), carbon (CFRP), glass (GFRP) and high-strength steel. Also, two common matrices exist named epoxy and ester (Karbhari 2015; Wu and Eamon 2017). The use of FRP in repairing and rehabilitation of the existing structures or in the construction of new structures has introduced a new area in civil engineering (Cai and Aref 2015; Xu et al. 2019). In addition to increasing the speed of the construction and creation of continuous confinement for the concrete member, FRP increases the member’s resistance to corrosion without changing the shape or size of the cross section (De Lorenzis and Tepfers 2003). Therefore, FRP sheets are widely used in the world for the aim of repairing or retrofitting the structural members (Colomb et al. 2008; Niroomandi et al. 2010; Ozcan et al. 2008; Promis et al. 2009).
There are enormous researches on the behavior of the RC members retrofitted by FRP sheets. Berset (1992) has carried out preliminary research on the shear capacity of beams strengthened with FRP sheets. The study presented an analytical model based on some experimental data to predict the shear capacity of FRP in the strengthened reinforced concrete beams. Also, Uji (1992) has proposed a model to estimate the shear contribution of CFRP in the strengthened reinforced concrete members. In a similar way, Dolan et al. (1993) have been studied different types of composites (i.e., AFRP, CFRP, and GFRP) in the improvement in the shear capacity of concrete members. The effect of different types of FRP on the improvement in the shear capacity of concrete members has been widely investigated by various researchers. Three different bounded and unbounded FRP wraps have been also studied by Teng et al. (2009) in order to improve the shear capacity of RC beams. In addition, several CFRP sheets have been used by Gamino et al. (2010) to improve the load capacity and ductility of concrete members. Moreover, the effect of strip-width-to-strip-spacing ratio on the behavior of the RC beams retrofitted by FRP composites has been investigated (Mofidi and Chaallal 2011). Furthermore, Li and Leung (2016) have evaluated the effect of shear span–effective depth ratio on the shear capacity of the retrofitted RC beams by full-wrapping FRP strip.
Nowadays, intelligence approximate systems such as the artificial neural network (ANN), adaptive neuro-fuzzy inference system (ANFIS), genetic programming (GP) and so on have provided a special tool to solve the problems in engineering (e.g., FRP-strengthened concrete structure, water resources management, bridge engineering, structural optimization, vibration control, etc.).Various researchers work on these fields (Abualigah and Khader 2017; Abualigah et al. 2018a, b, c, 2019; Abualigah 2019; Abualigah and Hanandeh 2015; Al-Janabi 2018; Al-Janabi et al. 2019a, b; Al-Janabi and Alkaim 2019; Al-Janabi and Alwan 2017; Al-Janabi and Mahdi 2019; Ali 2012a, b, 2013; Alkaim and Al-Janabi 2019; Ebrahimpour Komleh and Maghsoudi 2015; Hüsken et al. 2005; Kaghed et al. 2006; Kamgar et al. 2018; Mahdi and Al-Janabi 2019; Salman and Ali 2007). These algorithms are applicable to the complex problems with time-consuming mathematical solutions and the experimental problems with no clear logical relation between their parameters. A review of the literature shows the ability of ANN, ANFIS and GP to predict the behavior of the studied systems because of their positive features. These features are: (I) controlling the existing uncertainties between a large number of complex data, (II) finding the sensitivity between the inputs data and finally (III) devoting a relation between input and output data to predict the behavior of the studied system. Proposing an optimized formula is the main advantage of GP in comparison with ANN and ANFIS. In ANN and ANFIS, no formula or algorithm is presented. They are a trained black box to predict the targets. The proposed formula by GP could be used with a calculator or Excel file. But, it is worth to note that a computer with professional software such as MATLAB should be used for applying the ANFIS and ANN.
The determination of the shear capacity of RC beams is still a big challenge. This complexity is even enhanced when FRP sheets are applied to augment the shear capacity of RC beams (Sas et al. 2009). The total shear capacity of RC beam can be computed by adding the contributions of the concrete (Vc), the steel stirrups (Vs) and the FRP sheets (Vf). So far, numerous numerical studies have been provided to produce a mathematical equation for the estimation of the shear contribution of the FRP sheets. These equations are used in the guidelines such as CIDAR, Fib.TG9.3, ACI and CSA. A comprehensive comparison was presented by Folani (Sas et al. 2009) to evaluate the reliability of the proposed analytical equations. They illustrated that the proposed equations have considerable errors when they are compared with the experimental results. This proves that the use of intelligent approximation systems in this field could be very effective. Also, Tanarslan (2011) proposed a model to predict the shear contribution of FRP using ANN based on the experimental data. Also, Naderpour and Alavi (2017) predicted the shear capacity of the FRP sheets using ANFIS.
In this paper, multigene genetic programming (MGP) is used to propose a formula for the prediction of the shear capacity of FRP in strengthened RC beams. For this purpose, four steps including data gathering, inputs definition, MGP training and comparing are done. These steps are briefly shown in Fig. 1. Also, the sections of the paper are organized as follows. In the second section, the conducted studies about the application of ANN, ANFIS and GP to predict the capacity of elements combined with the composite material such as FRP are presented. In the third section, the MGP theory, construction, limitation, hypothesis and definitions are presented. Then, MGP is trained using the experimental data, and a formula is produced. In the fourth section, the error of the proposed formula is investigated in comparison with the actual values. Also, the MGP model is compared with the ANFIS model proposed by Naderpour and Alavi (2017). In the fifth section, the equations proposed by various researchers and guidelines, and their parameters are defined. In the sixth section, the results of MGP and the previous equations are compared with each other, and their errors are calculated. The results prove the excellent performance of the MGP model.

Main conducted steps
2 Related work
As mentioned, predicting the capacity of composite elements is complex. The conducted studies have indicated that the ability of intelligence approximation systems to predict the strength capacity of composite elements is more than the ability of formulations obtained by experiences. A summary of these studies is presented in Table 1. Mousavi et al. (2010) have been presented a formulation to predict the compressive strength of carbon fiber-reinforced polymer-confined concrete cylinders using GP, simulated annealing (SA) and multi-expression programming (MEP) methods. The linear genetic programming (LGP) has been used by Gandomi et al. (2011) to evaluate the shear resistance of steel fiber-RC beams (SFRCB). The model has been trained using the experimental results including normal and high-strength concrete beams. Kara (2011) presented a simple improved model to predict the shear strength of concrete slender beams without stirrups and reinforced with FRP bars using GP. Lee and Lee (2014) used ANN to predict the shear strength of RC flexural members reinforced with FRP bars. A new formulation has been also presented to predict the curvature ductility factor of FRP-strengthened reinforced high-strength concrete beams by Ebrahimpour Komleh and Maghsoudi (2015) using ANFIS and multiple regression methods. Also, GP has been utilized by Kalfat et al. (2016) to present a formulation for the anchorage strength model. This model can be used to predict the bond performance of FRP which leads to a better performance in retrofitting the structures. In the same way, Al-Mosawe et al. (2017) have used GP to present a formulation to predict the bond strength of CFRP-steel double-strap joints subjected to the impact loads.
The prediction of the shear contribution of FRP in retrofitted RC beams was studied by Tanarslan (2011) and Naderpour and Alavi (2017). Tanarslan (2011) predicted the shear contribution of FRP by using ANN. The model was developed using a database containing 103 test results of FRP-RC beams including rectangular and T-shaped beams. The model was trained using 83 data sets, and then it was tested with 20 sets of test data. Guideline equations, Fib14, ACI 440.2R, CIDAR, CNR-DT 200 and CHBDC were selected for evaluation the ANN model. Naderpour and Alavi (2017) approximated the shear contribution of FRP by using ANFIS. They used a data set that includes 89 samples of rectangular RC beams strengthened with FRP sheets for training and testing the ANFIS model. The model was trained using 76 data sets (85%) and then tested using 13 test data sets (15%). The proposed model was compared with the existing guideline equations such as Fib-TG9.3, CIDAR, ACI 440.2R-08 and CSA-S806(12).
As shown in Table 1, two recent works are completely related to this study. In these studies, it proved that the use of the artificial intelligence methods (i.e., ANN and ANFIS) could be effective in the prediction of shear capacity of FRP sheets. The accuracy of the artificial intelligence in comparison with the formulas provided by guidelines is very suitable. In the study conducted by Tanarslan et al. (2012), some of the samples are belonged to the T-shape beams and contain the mechanical anchors, and they cause errors in their approximation and prediction. The ANFIS model presented by Naderpour and Alavi (2017) was trained based on the rectangular beams with no additional mechanical equipment such as anchors. It caused the errors of ANFIS reduced in comparison with the ANN model. However, in both models, no formula was presented and the trained systems (ANN and ANFIS) were a black box while the result of a trained GP model is a formula for predicting the output based on the inputs.
3 Multigene genetic programming
3.1 Theory and construction
In 1954, the genetic program (GP) was introduced by Nils Aall Barricelli (Koza 1992). GP is an evolutionary algorithm and a learning machine to generate a function between the inputs and output. This generation is done using the Darwinian principles in survival and reproductive theory and with genetic operators for the mating formulas (Koza 1994). If it is possible to have different formulas and relationships to solve a problem, GP is a system for creating a function to solve the problem. The diagram of GP for generating a formula (a function of a computer program) is indicated in Fig. 2.

Diagram of GP
GP creates a function based on tree form. Each tree (gene) has a value of depth that defines the length of the function. In multigene genetic programming, each individual includes a number of weighted genes (d1, d2, …, dn) and a bias term (d0) (Brameier and Banzhaf 2007). Each tree (gene) involves the input variables (x, y, z, etc.) and predefined mathematical operators (see Fig. 3).

A sample of multigene genetic programming
In the first step of MGP, the initial population is created based on the predefined values for depth, the number of genes and mathematical operators. This generation in the first iteration is random. The number of individuals in each generation is based on the population size. There are three generation methods named full method, growth method and half-and-half method (see Fig. 4). The half-and-half method applies the full method for 50% of the population, and for the other 50% the growth method is employed (see Fig. 4) (Nedjah et al. 2009).

Full and growth method (max depth = 3)
The root-mean-squared-error (RMSE) between the output of MPG and real values are calculated as a fitness function. Based on the fitness function, the individuals are collected for the next generation. The tournament selection method is used to choose individuals for the next generation. This method randomly selects individuals from the population. Individuals participate in a tournament based on the best fitness function. The tournament size defines the number of individuals that have participated in the tournament (Brameier and Banzhaf 2007; Searson et al. 2010).
Three genetic operators, including crossover, mutation and direct copy are applied to create the next generation. The crossover operator consists of low- and high-level forms. In the low-level form, two individuals are selected as parents (Searson et al. 2010). A tree from each parent is selected and a branch of them is swapped, and then the offsprings are created (see Fig. 5). In high-level form, one or more genes are swapped between the parents for the creation of the offsprings (see Fig. 6). In mutation operator, some parts of genes in each individual are randomly changed (see Fig. 7). These changes include: (a) subtree replacing, (b) switch terminals and (c) Gaussian perturbation constant. In the direct copy operator, the individual is transferred to the next generation without any change. These operators have a probability of occurrence for the individuals. The crossover is the main and stable operator in GP as in a reproductive of animals and humans. The increase in the probability of the mutation and direct copy leads to errors enhancement in approximation. So, the probability of the crossover should be considerably more than the mutation and direct copy operators (Nedjah et al. 2009; Searson et al. 2010).

Low-level crossover operator

High-level crossover operator

Mutation operator
Using the selected individuals and the genetic operators, the next generation is created. The number of individuals in each generation should be equal to the population size. This process is iteratively performed based on the number of generations. Simultaneously, the weights of trees (genes) in each individual are modified by the least squares procedure (Searson et al. 2010). The algorithm of GP is presented in Fig. 8.

Multi-genetic programming algorithm
3.2 Limitations and hypothesis
The aim of the proposed MGP is to create a formula that is easy to use and has acceptable accuracy. Also, the formula should be compared with the ANFIS model presented by Naderpour and Alavi (2017). In addition, the training of MGP is based on the experimental results presented in past studies for rectangular beams. Based on these reasons, the following hypothesis is considered here:
- 1.
Since there are extensive experimental data for FRP sheets in 45° and 90° (two common used degree in practice), the obtained formula is valid for these degrees.
- 2.
The proposed formulation can be used to predict the shear capacity of FRP in strengthened reinforced concrete beams for all full and U-wrap models with a single equation.
- 3.
In deriving the proposed formulation, only some of the mathematical operators (not all of them) have been used in MGP models which results in a formula with high accuracy and ability to calculate manually. So, the use of bi-sectional commands or If-then (conditional) commands is prevented.
- 4.
Given that the proposed model should be compared with the ANFIS model, the samples selected for training and testing are in accordance with the study conducted by Naderpour and Alavi (2017).
3.3 Variables definition
Herein, the parameters of MGP are set. The defined values are based on the trial and errors to obtain the best results. The input variables are presented in Table 2. The training and testing data are defined according to Table 9 (see “Appendix”). For comparing the MGP model (in this study) and ANFIS model (Naderpour and Alavi 2017), the input variables and test data are selected according to the model proposed by Naderpour and Alavi (2017). The defined values of the MGP parameters and the used mathematical operators are presented in Tables 3 and 4, respectively.
3.4 Results
The values of RMSE for the best formula in each generation are shown in Fig. 9. The results illustrate that RMSE in the first iteration is equal to 40.43, while it reduces to 3.66 in the 300th iteration. The genes of the best formula at the end of the training procedure are presented in Table 5. As shown, the number of genes has reached 67. It should be noted that the presented genes in Table 5 are the weighted genes (dn× treen). The tree form of Gene17 is indicated in Fig. 10. It can be seen that the depth of the tree has reached 10. The weight of Gene17 is equal to − 30.37. The formula obtained by MGP has been presented in Fig. 11.

Values of RMSE during MGP process

Tree form of Gene 17

The proposed formula by MGP
4 Comparing the MGP and ANFIS models
In this section, the proposed formula using MGP is compared with the ANFIS model proposed by Naderpour and Alavi (2017). For this purpose, the values predicted by MGP and ANFIS are plotted in Figs. 12 and 13 for the aims of training and testing data, and they have been compared with the actual values. The results illustrate that the MGP model has a good agreement with the actual values. In addition, the errors of the MGP and ANFIS models are calculated and compared in terms of mean absolute percentage error (MAPE), absolute fraction of variance (R2) and root-mean-squared-error (RMSE) according to Eqs. (1)–(3).

Comparison between the MGP, ANFIS and actual outputs for training data

Comparison between the MGP, ANFIS and actual outputs for testing data
As shown in Table 6, the values of MAPE and RMSE for the training data of the MGP model are reduced approximately by 60% in comparison with those of the ANFIS model. Also, these reductions are about 48% (MAPE) and 28% (RMSE) for the whole data.
Therefore, it can be concluded that MGP can predict the actual shear capacity of FRP by the proposed formula with reasonable accuracy. Proposing a formula is the main characteristic of MGP in comparison with ANFIS and ANN. It helps MGP to become very usable while ANFIS is a black box that cannot present any equation or algorithm. In fact, ANFIS should be used in computing for new samples. Also, ANFIS should be applied by software such as MATLAB or other programs. But, the proposed formula by MGP could be utilized easily using a calculator and simple software like Microsoft Excel.
5 Overview of some existing models
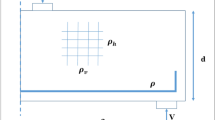
There are some formulas which can be used to approximate the shear capacity of FRP in strengthened reinforced concrete beams. In these formulas, some parameters are used as the input parameters [i.e., elasticity modulus of FRP (Ef), effective strain of FRP (εfe), ultimate strain of FRP (εfu), FRP reinforcement ratio (ρf), concrete compressive strength (fc′), FRP thickness (tf), effective depth of RC beam (d), minimum width of RC beam over the effective depth (bw), FRP strips width (wf), FRP strips spacing (sf), effective stress of FRP (ffe), ultimate stress of FRP (ffd), angle of diagonal crack with respect to the member axis (θ) and the angle between fiber orientation and longitudinal axis member (α)]. The existing formula to compute the shear capacity of FRP in strengthened reinforced concrete beams is listed in Table 7. Also, Fig. 14 shows a beam strengthened by FRP sheets and the parameters that have been used to compute the shear capacity of FRP.

A strengthened beam using FRP sheets
6 Comparison of the proposed formula with several existing formulas
To show the ability of the proposed formula, four common guidelines (ACI Committee 440 2008; CIDAR 2006; CSA-S806-12 2012; Fib-TG9.3 2001) are considered, and the results are compared. It should be noted that the existing guidelines (ACI Committee 440 2008; CIDAR 2006; CSA-S806-12 2012; Fib-TG9.3 2001) have two different formulas based on FRP-configuration in RC members (full-wrap and U-wrap), while the proposed formula by MPG covers these two configurations by a single formula. It can be considered as a positive point of the proposed formula. The values of shear capacity of FRP obtained by the proposed and the existing formulas are shown in Fig. 15. Also, Table 8 provides the values of MAPE, RMSE and R2 for the studied formulas.

Comparison between MGP and experimental results for the shear capacity of FRP
Based on Table 8, the values MAPE, RMSE and R2 for the proposed formula are 8.92%, 7.16% and 0.989%, respectively. These values for the CSA S806, ACI 440.2R, CIDAR and Fib-TG9.3 methods are more than 35.91%, 25.06% and 0.302%, respectively. This indicates that for the proposed formula, the simulated results are exactly being consistent with the experimental results more than 91%. This shows the accuracy of the proposed formula while the accuracy of other existing formulas is lower than 64%. It needs to be noted that the proposed formula is able to predict the shear capacity of FRP with a different configuration for FRP (full-wrap and U-wrap). In fact, it can be concluded that the proposed formula has a higher precision compared with the existing formulas in the prediction of FRP shear capacity.
7 Conclusion
In this paper, the MGP method has been used to predict the shear capacity of FRP in strengthened RC beams. For this purpose, a set of previously published and available experimental data (89 instances) have been collected. Then, 85% of the data (76 instances) has been used for training the MGP and 15% (13 instances) for testing. Finally, a new formulation has been proposed utilizing MGP. The correlation coefficients of the proposed formula are equal to 0.997, 0.956 and 0.989 for training, testing and whole data, respectively. The results make it obvious that the MGP model has a good agreement with the actual values. To study the accuracy of the proposed formula, the results obtained by MGP have been compared with those of the ANFIS model. The errors of the MGP and ANFIS models have been calculated and compared in terms of MAPE, R2 and RMSE. The results indicated that the errors were decreased in the MGP model for training and whole data in comparison with the ANFIS model. This decrease in training step was about 62% for MAPE error. For the whole data, MAPE and RMSE errors were reduced by about 48% and 29%, respectively. But the errors for testing data in the ANFIS model were less than the MGP model. The MAPE and RMSE errors in the ANFIS model were, respectively, reduced by about 36% and 33% in comparison with the MGP model. Furthermore, the proposed formula has been compared to the formulas from the available guidelines including CSA-S806, ACI 440.2R, CIDAR and Fib-TG9.3. The results reveal that the formula proposed by MGP is able to predict the shear capacity of FRP with higher precision compared to the existing formulas. The equations CIDAR and Fib.TG9.3 had more accuracy in the prediction of the shear capacity of FRP in comparison with the ACI and CSA equations. The MAPE error for the MGP formula was reduced by about 74% in comparison with the CIDAR equations. Also, the RMSE error of MGP formula was decreased near 71% in comparison with the Fib.TG9.3 equations.
Besides, it is shown that the MGP is a formula which could be used by a calculator, while the ANFIS model should be applied by a computer and professional programs. Also, the MGP formulation could be used for both full and U-wrap FPR models, while CSA S806, ACI 440.2R, CIDAR and Fib-TG9.3 have two different formulas for full and U-wrap models. There is a low experimental test on the retrofitting of the beam sections with FRP sheets by angle 30°, 60° and 75° that could be tested experimentally to propose a formula that covers all over the region of FRP angles. It can be worked in the future.
References
Abdel-Jaber M, Walker P, Hutchinson A (2003) Shear strengthening of reinforced concrete beams using different configurations of externally bonded carbon fiber reinforced plates. Mater Struct 36:291–301
Abualigah LMQ (2019) Feature selection and enhanced krill herd algorithm for text document clustering. Springer, Cham
Abualigah LMQ, Hanandeh ES (2015) Applying genetic algorithms to information retrieval using vector space model. Int J Comput Sci Eng Appl 5:19–28. https://doi.org/10.5121/ijcsea.2015.5102
Abualigah LM, Khader AT (2017) Unsupervised text feature selection technique based on hybrid particle swarm optimization algorithm with genetic operators for the text clustering. J Supercomput 73:4773–4795. https://doi.org/10.1007/s11227-017-2046-2
Abualigah LM, Khader AT, Hanandeh ES (2018a) A combination of objective functions and hybrid krill herd algorithm for text document clustering analysis. Eng Appl Artif Intell 73:111–125. https://doi.org/10.1016/j.engappai.2018.05.003
Abualigah LM, Khader AT, Hanandeh ES (2018b) Hybrid clustering analysis using improved krill herd algorithm. Appl Intell 48:4047–4071. https://doi.org/10.1007/s10489-018-1190-6
Abualigah LM, Khader AT, Hanandeh ES (2018c) A new feature selection method to improve the document clustering using particle swarm optimization algorithm. J Comput Sci 25:456–466. https://doi.org/10.1016/j.jocs.2017.07.018
Abualigah LM, Khader AT, Hanandeh ES (2019) Modified krill herd algorithm for global numerical optimization problems. In: Shandilya SK, Shandilya S, Nagar AK (eds) Advances in nature-inspired computing and applications. Springer, Cham, pp 205–221
ACI Committee 440 (2008) Guide for the design and construction of externally bonded FRP systems for strengthening concrete structures. American Concrete Institute, Farmington Hills
Adhikary BB, Mutsuyoshi H (2004) Behavior of concrete beams strengthened in shear with carbon-fiber sheets. J Compos Constr 8:258–264
Adhikary B, Mutsuyoshi H, Ashraf M (2003) Effective shear strengthening of concrete beams using FRP sheets with bonded anchorage. In: Proceeding 6th international conference on fiber reinforced polymer reinforcement concrete structures (FRPRCS-6), Singapore. World Scientific, pp 457–466
Ali SH (2012a) Miner for OACCR: case of medical data analysis in knowledge discovery. In: 6th International conference on sciences of electronics, technologies of information and telecommunications (SETIT), Sousse, Tunisia, pp 962–975
Ali SH (2012b) A novel tool (FP-KC) for handle the three main dimensions reduction and association rule mining. In: 6th International conference on sciences of electronics, technologies of information and telecommunications (SETIT), Sousse, Tunisia, 951–961
Ali SH (2013) Novel approach for generating the key of stream cipher system using random forest data mining algorithm. In: 6th International conference on developments in eSystems engineering, Abu Dhabi, United Arab Emirates, pp 259–269
Al-Janabi S (2018) Smart system to create an optimal higher education environment using IDA and IOTs. Int J Comput Appl. https://doi.org/10.1080/1206212X.2018.1512460
Al-Janabi S, Alkaim AF (2019) A nifty collaborative analysis to predicting a novel tool (DRFLLS) for missing values estimation. Soft Computi. https://doi.org/10.1007/s00500-019-03972-x
Al-Janabi S, Alwan E (2017) Soft mathematical system to solve black box problem through development the FARB based on hyperbolic and polynomial functions. In:10th International conference on developments in eSystems engineering (DeSE), Paris, France, pp 37–42
Al-Janabi S, Mahdi MA (2019) Evaluation prediction techniques to achievement an optimal biomedical analysis. Int J Grid Util Comput 10:512–527. https://doi.org/10.1504/IJGUC.2019.10020511
Al-Janabi S, Alhashmi S, Adel Z (2019a) Design (More-G) model based on renewable energy and knowledge constraint. In: Farhaoui Y (ed) Big data and networks technologies. Springer, Cham, pp 271–295
Al-Janabi S, Yaqoob A, Mohammad M (2019b) Pragmatic method based on intelligent big data analytics to prediction air pollution. In: Farhaoui Y (ed) Big data and networks technologies. Springer, Cham, pp 84–109
Alkaim AF, Al-Janabi S (2019) Multi objectives optimization to gas flaring reduction from oil production. In: Farhaoui Y (ed) Big data and networks technologies. Springer, Cham, pp 117–139
Al-Mosawe A, Kalfat R, Al-Mahaidi R (2017) Strength of Cfrp-steel double strap joints under impact loads using genetic programming. Compos Struct 160:1205–1211
Araki N, Matsuzaki Y, Nakano K, Kataoka T, Fukuyama H (1997) Shear capacity of retrofitted RC members with continuous fiber sheets. In: Non-metallic (FRP) reinforcement for concrete structures, proceedings of the third symposium, pp 515–522
Barros JA, Dias SJ (2006) Near surface mounted CFRP laminates for shear strengthening of concrete beams. Cem Concr Compos 28:276–292
Beber AJ, Campos Filho A (2005) CFRP composites on the shear strengthening of reinforced concrete beams. Rev IBRACON Estruturas 1
Berset J-D (1992) Strengthening of reinforced concrete beams for shear using FRP composites. Massachusetts Institute of Technology, Cambridge
Bousselham A, Chaallal O (2006) Effect of transverse steel and shear span on the performance of RC beams strengthened in shear with CFRP. Compos Part B Eng 37:37–46
Bousselham A, Chaallal O (2008) Mechanisms of shear resistance of concrete beams strengthened in shear with externally bonded FRP. J Compos Constr 12:499–512
Brameier MF, Banzhaf W (2007) Linear genetic programming. Springer, Cham
Cai H, Aref AJ (2015) A genetic algorithm-based multi-objective optimization for hybrid fiber reinforced polymeric deck and cable system of cable-stayed bridges. Struct Multidiscip Optim 52:583–594. https://doi.org/10.1007/s00158-015-1266-4
Cao S, Chen J, Teng J, Hao Z, Chen J (2005) Debonding in RC beams shear strengthened with complete FRP wraps. J Compos Constr 9:417–428
Chajes MJ, Januszka TF, Mertz DR, Thomson TA, Finch WW (1995) Shear strengthening of reinforced concrete beams using externally applied composite fabrics. Struct J 92:295–303
CIDAR (2006) Design guideline for RC structures retrofitted with FRP and metal plates: beams and slabs, Draft 3. Submitted to Standards Australia, The University of Adelaide
Colomb F, Tobbi H, Ferrier E, Hamelin P (2008) Seismic retrofit of reinforced concrete short columns by CFRP materials. Compos Struct 82:475–487. https://doi.org/10.1016/j.compstruct.2007.01.028
CSA-S806-12 (2012) Design and construction of building components with fibre-reinforced polymers. Canadian Standards Association, Mississauga
De Lorenzis L, Tepfers R (2003) Comparative study of models on confinement of concrete cylinders with fiber-reinforced polymer composites. J Compos Constr 7:219–237. https://doi.org/10.1061/(ASCE)1090-0268(2003)7:3(219)
Deniaud C, Cheng JR (2001) Shear behavior of reinforced concrete T-beams with externally bonded fiber-reinforced polymer sheets. Struct J 98:386–394
Deniaud C, Roger Cheng J (2003) Reinforced concrete T-beams strengthened in shear with fiber reinforced polymer sheets. J Compos Constr 7:302–310
Diagana C, Li A, Gedalia B, Delmas Y (2003) Shear strengthening effectiveness with CFF strips. Eng Struct 25:507–516
Dolan C, Rider W, Chajes M, DeAscanis M (1993) Prestressed concrete beams using non-metallic tendons and external shear reinforcement. Fiber Reinf Plast Reinf Concr Struct Am Concr Inst SP 138:475–496
Ebrahimpour Komleh H, Maghsoudi A (2015) Prediction of curvature ductility factor for FRP strengthened RHSC beams using ANFIS and regression models. Comput Concr 16:399–414
Feng X, Zhong Fan H (2004) Experimental research on shear strengthening of reinforced concrete beams with externally bonded CFRP sheets. Ind Buiding 34:89–93 (In Chinese)
Fib-TG9.3 (2001) Design and use of externally bonded fiber reinforced polymer reinforcement (FRP EBR) for reinforced concrete structures. International Federation for Structural Concrete, Lausanne
Gamino AL, Sousa J, Manzoli OL, Bittencourt TN (2010) R/C structures strengthened with CFRP part II: analysis of shear models. Revista IBRACON de Estruturas e Materiais 3:24–49
Gandomi A, Alavi A, Yun G (2011) Nonlinear modeling of shear strength of SFRC beams using linear genetic programming. Struct Eng Mech 38:1–25
Hüsken M, Jin Y, Sendhoff B (2005) Structure optimization of neural networks for evolutionary design optimization. Soft Comput 9:21–28
Jayaprakash J, Samad AAA, Abbasovich AA, Ali AAA (2008) Shear capacity of precracked and non-precracked reinforced concrete shear beams with externally bonded bi-directional CFRP strips. Constr Build Mater 22:1148–1165
Kaghed NH, Abbas TA, Ali SH (2006) Design and implementation of classification system for satellite images based on soft computing techniques. In: 2nd International conference on information and communication technologies, Damascus, Syria, pp 430–436
Kalfat R, Nazari A, Al-Mahaidi R, Sanjayan J (2016) Genetic programming in the simulation of Frp-to-concrete patch-anchored joints. Compos Struct 138:305–312
Kamgar R, Hatefi SM, Majidi N (2018) A fuzzy inference system in constructional engineering projects to evaluate the design codes for RC buildings. Civ Eng J 4:2155–2172. https://doi.org/10.28991/cej-03091147
Kara IF (2011) Prediction of shear strength of FRP-reinforced concrete beams without stirrups based on genetic programming. Adv Eng Softw 42:295–304
Karbhari VM (2015) Rehabilitation of pipelines using fiber-reinforced polymer (FRP) composites. Woodhead Publishing, Waltham
Khalifa A (1999) Shear performance of reinforced concrete beams strengthened with advanced composites. DISS. University of Alexandria, Egypt
Khalifa A, Nanni A (2000) Improving shear capacity of existing RC T-section beams using CFRP composites. Cem Concr Compos 22:165–174
Koza JR (1992) Genetic programming, on the programming of computers by means of natural selection. MIT Press, London
Koza JR (1994) Genetic programming as a means for programming computers by natural selection. Stat Comput 4:87–112
Lee S, Lee C (2014) Prediction of shear strength of FRP-reinforced concrete flexural members without stirrups using artificial neural networks. Eng Struct 61:99–112
Li W, Leung CK (2016) Shear span–depth ratio effect on behavior of RC beam shear strengthened with full-wrapping FRP strip. J Compos Constr 20:04015067. https://doi.org/10.1061/(ASCE)CC.1943-5614.0000627
Li A, Diagana C, Delmas Y (2002) Shear strengthening effect by bonded composite fabrics on RC beams. Compos Part B Eng 33:225–239
Mahdi MA, Al-Janabi S (2019) A novel software to improve healthcare base on predictive analytics and mobile services for cloud data centers. In: Farhaoui Y (ed) Big data and networks technologies. Springer, Cham, pp 320–339
Miyajima H, Kosa K, Tasaki K, Matsumoto S (2005) Shear strengthening of RC beams using carbon fiber sheets and its resistance mechanism. In: Proceedings, pp 114–125
Miyauchi K, Inoue S, Nishibayashi S, Tanaka Y (1998) Shear behavior of reinforced concrete beam strengthened with CFRP sheet. Trans Jpn Concr Inst 19:97–104
Mofidi A, Chaallal O (2011) Shear strengthening of RC beams with externally bonded FRP composites: effect of strip-width-to-strip-spacing ratio. J Compos Constr 15:732–742
Monti G (2007) Tests and design equations for FRP-strengthening in shear. Constr Build Mater 21:799–809
Mousavi SM, Alavi AH, Gandomi AH, Arab Esmaeili M, Gandomi M (2010) A data mining approach to compressive strength of CFRP-confined concrete cylinders. Struct Eng Mech 36:759–783
Naderpour H, Alavi S (2017) A proposed model to estimate shear contribution of FRP in strengthened RC beams in terms of adaptive neuro-fuzzy inference system. Compos Struct 170:215–227
Nedjah N, Abraham A, de Macedo Mourelle L (2009) Genetic systems programming: theory and experiences. Springer Publishing Company, Incorporated, Cham
Niroomandi A, Maheri A, Maheri MR, Mahini S (2010) Seismic performance of ordinary RC frames retrofitted at joints by FRP sheets. Eng Struct 32:2326–2336. https://doi.org/10.1016/j.engstruct.2010.04.008
Ono K, Matsumura M, Sakanishi S, Miyata K (1997) Strength improvement of RC bridge piers by carbon fiber sheet. In: Non-metallic (FRP) reinforcement for concrete structures, vol 1. Japan Concrete Institute, pp 563–570
Ozcan O, Binici B, Ozcebe G (2008) Improving seismic performance of deficient reinforced concrete columns using carbon fiber-reinforced polymers. Eng Struct 30:1632–1646. https://doi.org/10.1016/j.engstruct.2007.10.013
Panda K, Bhattacharyya S, Barai S (2013) Effect of transverse steel on the performance of RC T-beams strengthened in shear zone with GFRP sheet. Constr Build Mater 41:79–90
Park S, Naaman A, Lopez M, Till R (2001) Shear strengthening effect of RC beams using glued CFRP sheets. In: FRP composites in civil engineering. Proceedings of the international conference on FRP composites in civil engineering Hong Kong Institution of Engineers, Hong Kong Institution of Steel Construction
Promis G, Ferrier E, Hamelin P (2009) Effect of external FRP retrofitting on reinforced concrete short columns for seismic strengthening. Compos Struct 88:367–379. https://doi.org/10.1016/j.compstruct.2008.04.019
Salman MA, Ali SH (2007) Knowledge discovery in data mining using fuzzy c-means model and genetic programming. In: 4th International conference: sciences of electronic, technologies of information and telecommunications, SETIT 2007, Tunisia
Sas G, Täljsten B, Barros J, Lima J, Carolin A (2009) Are available models reliable for predicting the FRP contribution to the shear resistance of RC beams? J Compos Constr 13:514–534
Sato Y, Ueda T, Kakuta Y, Tanaka T (1996) Shear reinforcing effect of carbon fiber sheet attached to side of reinforced concrete beams. In: Proceedings of the 2nd International conference on advanced composite materials in bridges and structures, ACMBS-II, Montreal
Searson DP, Leahy DE, Willis MJ (2010) GPTIPS: an open source genetic programming toolbox for multigene symbolic regression. In: Proceedings of the international multiconference of engineers and computer scientists, pp 77–80
Taerwe L, Khalil H, Matthys S (1997) Behaviour of RC beams strengthened in shear by external CFRP sheets. In: Proceedings of the third international symposium on non-metallic (FRP) reinforcement for concrete structures (FRPRCS-3), Sapporo, Japan
Tanarslan H (2011) Predicting the capacity of RC beams strengthened in shear with side-bonded FRP reinforcements using artificial neural networks. Compos Interfaces 18:587–614
Tanarslan H, Secer M, Kumanlioglu A (2012) An approach for estimating the capacity of RC beams strengthened in shear with FRP reinforcements using artificial neural networks. Constr Build Mater 30:556–568. https://doi.org/10.1016/j.conbuildmat.2011.12.008
Teng J, Chen G, Chen J, Rosenboom O, Lam L (2009) Behavior of RC beams shear strengthened with bonded or unbonded FRP wraps. J Compos Constr 13:394–404. https://doi.org/10.1061/(ASCE)CC.1943-5614.0000040
Uji K (1992) Improving shear capacity of existing reinforced concrete members by applying carbon fiber sheets. Trans Jpn Concr Inst 14:253–266
Umezu K (1997) Shear behavior of RC beams with aramid fiber sheet, Japan Concrete Institute, non-metallic (FRP) reinforcement for concrete structures. In: Proceeding of the third international symposium, pp 491–498
Wu H-C, Eamon CD (2017) Strengthening of concrete structures using fiber reinforced polymers (FRP): design, construction and practical applications. Woodhead Publishing, Cambridge
Xu Y, Gao Y, Wu C, Fang J, Li Q (2019) Robust topology optimization for multiple fiber-reinforced plastic (FRP) composites under loading uncertainties. Struct Multidiscip Optim 59:695–711. https://doi.org/10.1007/s00158-018-2175-0
Zhang Z, Hsu C-TT, Moren J (2004) Shear strengthening of reinforced concrete deep beams using carbon fiber reinforced polymer laminates. J Compos Constr 8:403–414
Acknowledgements
The authors would like to show their appreciations to HPC center (Shahr-e-Kord University, Iran) for their collaboration in offering computational clusters, which was a great help to complete this work. This study has not been funded.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
This article does not contain any studies with animal/human participants performed by any of the authors.
Additional information
Communicated by V. Loia.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kamgar, R., Bagherinejad, M.H. & Heidarzadeh, H. A new formulation for prediction of the shear capacity of FRP in strengthened reinforced concrete beams. Soft Comput 24, 6871–6887 (2020). https://doi.org/10.1007/s00500-019-04325-4
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00500-019-04325-4