
Abstract
In this paper, we consider a fuzzy multi-point boundary value problem-FMBVP [or a multi-point boundary value problem (MBVP) for fuzzy second-order differential equations (FSDEs) under generalized Hukuhara differentiability]. We present solving methods for a FMBVP in the space of fuzzy numbers \(E^{1}\), such that we have shown the ability to and methods to find solution of the MBVP for FSDEs in the form of \((FH^{gi}-FH^{gj})\)-solutions. In addition, we provide with a new idea to develop the real Green’s function method and give two examples being simple illustration of this FMBVP.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Research of fuzzy boundary value problems (FBVPs) is beneficial for many problems involving fuzzy systems, for example, the mathematical modeling of the physical and mechanical problems in which uncertainties or vagueness pervade. In recent year, the fuzzy boundary value problems have gained development in both theory and application. FBVPs was first considered by Lakshmikantham et al. (2001). Thereafter, O’Regan et al. (2002) presented that a fuzzy two-point boundary value problem is equivalent to a fuzzy integral equation written by using Green’s function. However, Bede (2006) indicated a counterexample which shows that the two-point boundary value problem for a fuzzy differential equation is not equivalent to a fuzzy integral equation, because a fuzzy function may have two kinds of derivatives. Also, he proved that a large class of fuzzy two-point boundary value problems have not any solution under Hukuhara differentiability concept. In the following years, there are several research of FBVPs was published by the authors, for example: Khastan and Nieto (2010) proposed a new solution concept for a two-point boundary value problem for a second-order fuzzy differential equation using generalized differentiability, not only that, Khastan et al. (2013) considered the existence of solutions for a class of FBVPs under generalized differentiability, Chen et al. (2008) proved the existence of the solution of a two-point boundary value problem and showed equivalent between a two-point boundary value problem and a fuzzy integral equation under a new structure and certain conditions, Agarwal et al. (2005) studied the existence of fuzzy solutions for multi-point boundary value problems, Gasilov et al. (2015) have presented to a new approach to a non-homogeneous FBVPs by consider a linear differential equation with real coefficients but with a fuzzy forcing function and fuzzy boundary values, they also have developed a method that finds this solution.
Most of the above research approaches to FBVPs depend on the concept of the solution to the fuzzy differential equation. The researchers assume that the derivative in the fuzzy differential equation is a fuzzy derivative. This derivative can be the Hukuhara derivative (H-derivative), or generalized Hukuhara derivative (Chalco-Cano et al. 2016). Bede and Gal (2005) developed the concept of the fuzzy generalized H-derivative. Khastan and Nieto (2010) and Khastan et al. (2013) investigated FBVPs using this concept. Furthermore, Bede (2006) proved that a large class of fuzzy two-point boundary value problem have not solution when using the fuzzy H-derivatives.
In this paper, we use the concept of the fuzzy generalized H-derivatives to study a multi-point boundary value problem for fuzzy second-order differential equations (MBVP for FSDEs) (or fuzzy multi-point boundary value problem-FMBVP), we analyze solutions of this problem and present some methods to find them.
This paper is organized as follows. In Sect. 2, we describe some preliminaries of fuzzy analysis, as the first-order and the second-order fuzzy generalized Hukuhara derivatives. In Sect. 3, we formulate a multi-point boundary value problem for fuzzy second-order differential equations under fuzzy generalized Hukuhara differentiability (MBVP for FSDEs) with certain conditions on the space of fuzzy numbers \(E^{1}\) and its properties, describe some methods for solving of this problem. In the last section, we give two examples being simple to illustrate our method.
2 Preliminaries
Let us consider the collection \( K_C({\mathbb {R}}^d) \) of all nonempty, compact and convex subsets of \( {\mathbb {R}}^d \). Given A, B in \( K_C({\mathbb {R}}^d) \), the Hausdorff distance between A and B defined as
where \(\Vert .\Vert _{R^d}\) denotes the Euclidean norm in \({\mathbb {R}}^d\). It is known that \((K_C({\mathbb {R}}^d), d_H)\) is a complete metric space and if the space \(K_C({\mathbb {R}}^d)\) is equipped with the natural algebraic operations of addition and nonnegative scalar multiplication, then \(K_C({\mathbb {R}}^d)\) becomes a semilinear metric space which can be embedded as a complete cone into a corresponding Banach space. Set \( {E}^d =\{\omega :{\mathbb {R}}^d \rightarrow [0, 1]\) such that \(\omega (z)\) satisfies (i)–(iv) stated below\(\}\)
- (i)
\(\omega \) is normal, that is, there exists an \(z_0 \in {\mathbb {R}}^d\) such that \( \omega (z_0)=1\);
- (ii)
\(\omega \) is fuzzy convex, that is, for \(0 \le \lambda \le 1\)
$$\begin{aligned} \omega (\lambda z_1+(1-\lambda )z_2)\ge \min \{\omega (z_1), \omega (z_2)\}; \end{aligned}$$ - (iii)
\(\omega \) is upper semicontinuous;
- (iv)
\([\omega ]^0=cl\{z\in {\mathbb {R}}^d: \omega (z)>0\}\) is compact, where cl denotes the closure in \(({\mathbb {R}},|.|)\).
The element \(\omega \in {E}^d\) is called a fuzzy set. When \(d = 1,\) elements of \(E^1\) are often called the fuzzy numbers and \(E^{1}\) is called fuzzy numbers space.
The set \([\omega ]^\alpha =\{z\in {\mathbb {R}}^d: \omega (z)\ge \alpha , 0 <\alpha \le 1\}\) is called the \(\alpha \)-level set. For all \(0\leqslant \alpha \leqslant \beta \leqslant 1\) then we have \({\left[ \omega \right] ^\beta } \subset {\left[ \omega \right] ^\alpha } \subset {\left[ \omega \right] ^0}\).
For two fuzzy sets \(\omega _1,\omega _2,\) we denote \(\omega _1 \leqslant \omega _2\) if and only if \({\left[ {{\omega _1}} \right] ^\alpha } \subset {\left[ {{\omega _2}} \right] ^\alpha }\). Let us denote
the distance between \(\omega _1\) and \(\omega _2\) in \(E^d\), where \(d_H\Big [[\omega _{1}]^\alpha ,[\omega _{2}]^\alpha \Big ]\) is Hausdorff distance between two set \([\omega _1]^\alpha , [\omega _2]^\alpha \) of \(K_{C}({\mathbb {R}}^d)\). Then \((E^d, D_0)\) is a complete space. Some properties of metric \(D_0\) are as follows.
for all \(\omega _1, \omega _2, \omega _3 \in E^d\) and \(\lambda \in {\mathbb {R}}\).
Given an interval \( [t_0, T]\subseteq {\mathbb {R}}_+\).
Let us denote \(\theta ^d \in E^d\) the zero element of \(E^d\) as follows:
where \({\widehat{0}}\) is the zero element of \({\mathbb {R}}^d\).
Definition 1
Let \(x, y\in E^{1}.\) if there exists \( z \in E^{1}\) such that \( x = y+z \), then z is called the Hukuhara difference of x, y and it is denoted \( z = x \ominus y.\)
Definition 2
(see Bede and Gal 2005) Let \(x: (t_{0}, T) \rightarrow E^1\) and \(t\in (t_{0}, T) \). We say that x is fuzzy generalized differentiable at t, if there exists \(D^g_Hx(t) \in E^1\), such that
(i) for all \(h >0\) sufficiently small,
\(\exists x\left( {t + h} \right) \ominus x(t), \exists x(t) \ominus x(t - h)\) and
$$\begin{aligned} \mathop {\lim }\limits _{h \searrow 0} \frac{{x\left( {t + h} \right) \ominus x(t)}}{h} = \,\,\, \mathop {\lim }\limits _{h \searrow 0} \frac{{x\left( t \right) \ominus x(t - h)}}{h} = D^g_H x(t) \end{aligned}$$or
(ii) for all \(h > 0\) sufficiently small,
\(\exists x\left( {t } \right) \ominus x(t+h), \exists x(t-h) \ominus x(t)\) and
$$\begin{aligned} \mathop {\lim }\limits _{h \searrow 0} \frac{{x\left( {t } \right) \ominus x(t+h)}}{-h} = \,\,\, \mathop {\lim }\limits _{h \searrow 0} \frac{{x\left( t -h\right) \ominus x(t )}}{-h} = D^g_H x(t) \end{aligned}$$or
(iii) for all \(h >0\) sufficiently small,
\(\exists x\left( {t + h} \right) \ominus x(t), \exists x(t-h) \ominus x(t )\) and
$$\begin{aligned} \mathop {\lim }\limits _{h \searrow 0} \frac{{x\left( {t + h} \right) \ominus x(t)}}{h} = \,\,\, \mathop {\lim }\limits _{h \searrow 0} \frac{{x\left( t -h\right) \ominus x(t )}}{-h} = D^g_H x(t) \end{aligned}$$or
(iv) for all \(h >0\) sufficiently small,
\(\exists x\left( {t } \right) \ominus x(t+h), \exists x(t) \ominus x(t-h)\) and the limits
$$\begin{aligned} \mathop {\lim }\limits _{h \searrow 0} \frac{{x\left( {t } \right) \ominus x(t+h)}}{-h} = \,\,\, \mathop {\lim }\limits _{h \searrow 0} \frac{{x\left( t \right) \ominus x(t-h )}}{h} = D^g_H x(t). \end{aligned}$$
If the limits are taken in the metric space \((E ^1, D_0)\), and at boundary points we consider only the one-side derivatives, then we have the fuzzy generalized differentiables as follows:
Definition 3
Let \(x: (t_{0}, T) \rightarrow E^1\) and \(t\in (t_{0}, T) \). We say that x is fuzzy generalized differentiable at t, if there exists \(D^g_Hx(t) \in E^1\), such that
\((FH^{g1})\) : for all \(h >0\) sufficiently small, the fuzzy generalized differences \( x\left( {t + h} \right) \ominus x(t),\)
\(x(t) \ominus x(t - h)\) exist and the limits (in the metric \(D_{0}\))
or
\((FH^{g2})\): for all \(h >0\) sufficiently small, the fuzzy generalized differences \(x\left( {t } \right) \ominus x(t+h),\)
\(x(t-h) \ominus x(t)\) exist and the limits (in the metric \(D_{0}\))
In this paper, we consider only the two first fuzzy generalized differentiabilities of Definition 2 (or the cases (\(FH^{g1}\)) and (\(FH^{g2}\)) of Definition 3) and assume that do not have any switching point on \((t_{0}, T). \)
Theorem 1
Let \(x : [t_0,T] \rightarrow E^{1}\) be fuzzy function, where \([x(t)]^{\alpha }=[\underline{x}(t,\alpha ), \overline{x}(t,\alpha )]\) for each \(\alpha \in [0,1]\).
- (i)
If x is \( (FH^{g1})\)-differentiable, then \(\underline{x}(t,\alpha )\) and \(\overline{x}(t,\alpha )\) are differentiable functions and \([D_{H}^{g}x(t)]^{\alpha }=[\underline{x}^{'}(t,\alpha ),\)\( \overline{x}^{'}(t,\alpha )]\).
- (ii)
If x is \( (FH^{g2})\)-differentiable, then \(\underline{x}(t,\alpha )\) and \(\overline{x}(t,\alpha )\) are differentiable functions and \([D_{H}^{g}x(t)]^{\alpha }=[\overline{x}^{'}(t,\alpha ),\)\( \underline{x}^{'}(t,\alpha )]\).
Proof
Can see Kaleva (1987), Chalco-Cano and Roman-Flore (2008). \(\square \)
Hoa and Phu (2014) given the second-order generalized Hukuhara differentiability of fuzzy-valued functions x as followings:
Definition 4
(Hoa and Phu 2014) Let \(x: (t_{0}, T) \rightarrow E^1\) and \(t\in (t_0, T)\). We say that x is strongly generalized differentiable at t, if there exists \(D^g_Hx(t) \in E^1\) and \(D^{2,g}_{H}x(t) \in E^{1} \), such that
\((FH^{2,g1})\): for all \(h >0\) sufficiently small, the difference \(D_{H}^{g}x\left( {t + h} \right) \ominus D_{H}^{g}x(t),\ D_{H}^{g}x\left( t \right) \ominus D_{H}^{g}x(t - h)\) exist and the limits (in the metric \(D_{0}\))
or
\((FH^{2g2})\): for all \(h >0\) sufficiently small, the difference \( D_{H}^{g}x\left( {t } \right) \ominus D_{H}^{g}x(t+h),\ D_{H}^{g}x\left( t-h \right) \ominus D_{H}^{g}x(t )\) exist and the limits (in the metric \(D_{0}\))
Theorem 2
Let \(x : [t_0,T] \rightarrow E^{1}\) and \(D^{g}_{H}x(t) = x' : [t_0,T] \rightarrow E^{1}\) be fuzzy functions, where \( [x(t)]^{\alpha }= [\underline{x} (t,\alpha ), \overline{x}(t, \alpha )]\). If \(x, x'\) are \( (FH^{g1})\) - differentiable (or \( (FH^{g2})\)-differentiable), then by Zadeh’s extension principle, we have \( \underline{x}(t, \alpha ), \overline{x}(t, \alpha )\) and \(\underline{x}^{'}(t, \alpha ), \overline{x}^{'}(t, \alpha )\) are differentiable functions and
- (i)
\( [D^{2,g}_{H}x(t)]^{\alpha } = [\underline{x}^{''}(t, \alpha ), \overline{x}^{''}(t,\alpha )] \), where x(t) and \(D^{g}_{H}x(t)\) are (\(FH^{g1}\)) fuzzy differential functions;
- (ii)
\([D^{2,g}_{H}x(t)]^{\alpha } =[ \overline{x}^{''}(t,\alpha ), \underline{x}^{''}(t, \alpha )] \) where x(t) is (\(FH^{g1}\)) fuzzy differential function, and \(D^{g}_{H}x(t)\) is (\(FH^{g2}\)) fuzzy differential function;
- (iii)
\([D^{2,g}_{H}x(t)]^{\alpha }=[ \overline{x}^{''}(t,\alpha ),\underline{x}^{''}(t, \alpha )] \) where x(t) is (\(FH^{g2}\)) fuzzy differential function, and \(D^{g}_{H}x(t)\) is (\(FH^{g1}\)) fuzzy differential function;
- (iv)
\([D^{2,g}_{H}x(t)]^{\alpha }= [\underline{x}^{''}(t, \alpha ), \overline{x}^{''}(t,\alpha )] \), where x(t) and \(D^{g}_{H}x(t)\) are (\(FH^{g2}\)) fuzzy differential functions.
Proof
Can see Khastan et al. (2009), Hoa and Phu (2014). \(\square \)
3 Main result
Let us consider a fuzzy second-order differential equations under generalized Hukuhara differentiability (FSDEs):
where \(f:[t_{0},T]\times E^{1}\times E^{1}\rightarrow E^{1}\) is continuous with the solutions that satisfies the multi-point boundary conditions:
where \(\gamma _{1},\ \gamma _{2} \in E^{1},\)\(\alpha _{11},\ \alpha _{12},\ \alpha _{21},\ \alpha _{22}\in {\mathbb {R}}^{+} \) with \(\alpha _{11}^{2}+\alpha _{12}^{2}\ne 0,\ \alpha _{21}^{2}+\alpha _{22}^{2}\ne 0\) and (3)–(4) is called a multi-point boundary value problem for fuzzy second-order differential equations under generalized Hukuhara differentiability (MBVP for FSDEs) (or a fuzzy multi-point boundary value problem-FMBVP).
Definition 5
A fuzzy function \(x\in C^{2}([t_{0},T],E^{1})\) is called a solution of MBVP for FSDEs (3)–(4), if:
- (i)
x(t) and \(D^{g}_{H}x(t)\) are (\(FH^{gi}\))-differentiable functions for \(i=1, 2\), that \(D^{2,g}_{H}x(t)\) will be one of the terms in Theorem 2;
- (ii)
Remark 1
Some type of the fuzzy multi-point boundary value problem (FMBVP) depends on the change to value of \(\alpha _{ij},\)\( (i, j =1, 2) \) in (4), that we get different boundary conditions. For example, when \(\alpha _{12}= \alpha _{22}=0,\alpha _{11}=\alpha _{21}=1\) we have boundary condition the form \(x(t_{0}) = \gamma _{1},\ x (T)= \gamma _{2}\), from this boundary condition together with (3), so we get two-point boundary value problems, there are several studies published on this two-point boundary value problems (Bede 2006; Khastan and Nieto 2010; Lakshmikantham et al. 2001) . When \(\alpha _{12}= \alpha _{21}=0,\) (or the same, when \(\alpha _{11}= \alpha _{22}=0 \)), we have the initial valued problem for fuzzy second-order differential equations under generalized Hukuhara differentiability (IVP for FSDEs) (O’Regan et al. 2003), and when one of the \(\alpha _{ij}\) equals 0 we have three point boundary value problem (ThBVP) for fuzzy second-order differential equations under generalized Hukuhara differentiability.
3.1 Solving the MBVP for FSDEs by Hukuhara integrals
Theorem 3
From Eq. (3) Assume that \( f : [ t_{0}, T] \times E^{1}\times E^{1} \rightarrow E^{1}\) is continuous. A mapping \(x: [t_{0}, T] \rightarrow E^{1}\) is a general solution to Eq. (3) if and only if exist x(t) and \( D^{g}_{H}x(t)\) are continuous and satisfy:
- (i)
\(\displaystyle x(t) = C_{2} + C_{1}t + \int _{t_0}^{t}{(\int _{t_0}^{\tau } {f(\gamma ,x(\gamma ),D^{g}_{H}x(\gamma ))\mathrm{d}\gamma } )\mathrm{d} \tau } \) where x(t) and \(D^{g}_{H}x(t)\) are \((FH^{g1}) \)- differentiable, or
- (ii)
\(\displaystyle x(t) = C_{2} + C_{1}t \ominus (-1) \int _{t_0}^{t}{\left( \int _{t_0}^{\tau } {f(\gamma ,x(\gamma ),}\right. } \)\({\left. {D^{g}_{H}x(\gamma ))\mathrm{d}\gamma } \right) \mathrm{d} \tau } \) where x(t) is \((FH^{g1}) \)-differentiable, and \(D^{g}_{H}x(t)\) is \((FH^{g2})\)-differentiable.
- (iii)
\(\displaystyle x(t) = C_{2} \ominus (-1)(C_{1}t +\int _{t_0}^{t}{(\int _{t_0}^{\tau } {f(\gamma ,x(\gamma ),}}\)\({{D^{g}_{H}x(\gamma ))\mathrm{d}\gamma } )\mathrm{d} \tau }) \) where x(t) is \((FH^{g2}) \)-differentiable, and \(D^{g}_{H}x(t)\) is \((FH^{g1})\)-differentiable, or
- (iv)
\(\displaystyle x(t) = C_{2} \ominus (-1)(C_{1}t \ominus (-1) \int _{t_0}^{t}{(\int _{t_0}^{\tau } {f(\gamma ,x(\gamma ),}}\)\({{D^{g}_{H}x(\gamma ))\mathrm{d}\gamma } )\mathrm{d} \tau }) \) where x(t) and \(D^{g}_{H}x(t)\) are \((FH^{g2}) \)- differentiable. (where \(C_{1},C_{2}\) are constants any.)
Proof
Since f is continuous, it must be integrable. So (3) can be written in each case as follows:
- (i)
Let x(t) and \(D^{g}_{H}x(t)\) be \((FH^{g1})\)- differentiable. Then, from Eq. (3), we have equivalently
$$\begin{aligned} D^{g}_{H}x (t)= & {} C_{1}+ \int _{t_0}^{t} {f(\gamma ,x(\gamma ),D^{g}_{H}x(\gamma ))\mathrm{d}\gamma }\hbox { and thus }\\ x(t)= & {} C_{2} + C_{1}t + \int _{t_0}^{t}{\left( \int _{t_0}^{\tau } {f(\gamma ,x(\gamma ),D^{g}_{H}x(\gamma ))\mathrm{d}\gamma } \right) \mathrm{d} \tau } \end{aligned}$$ - (ii)
Let x(t) is \((FH^{g1}) \)-differentiable, and \(D^{g}_{H}x(t)\) is \((FH^{g2})\)-differentiable. Then, from Eq. (3), we have equivalently
$$\begin{aligned} D^{g}_{H}x (t)= & {} C_{1}\ominus (-1) \int _{t_0}^{t} {f(\gamma ,x(\gamma ),D^{g}_{H}x(\gamma ))\mathrm{d}\gamma }\\&\hbox { and thus}\\ x(t)= & {} C_{2} + C_{1}t \ominus (-1) \int _{t_0}^{t}\\&\times {\left( \int _{t_0}^{\tau } {f(\gamma ,x(\gamma ),D^{g}_{H}x(\gamma ))\mathrm{d}\gamma } \right) \mathrm{d} \tau }. \end{aligned}$$ - (iii)
Let x(t) is \((FH^{g2}) \)-differentiable, and \(D^{g}_{H}x(t)\) is \((FH^{g1})\)-differentiable. Then, from Eq. (3), we have equivalently
$$\begin{aligned} D^{g}_{H}x (t)= & {} C_{1}+ \int _{t_0}^{t} {f(\gamma ,x(\gamma ),D^{g}_{H}x(\gamma ))\mathrm{d}\gamma }\hbox { and thus}\\ x(t)= & {} C_{2} \ominus (-1)\left( C_{1}t + \int _{t_0}^{t}\right. \\&\times \left. {\left( \int _{t_0}^{\tau } {f(\gamma ,x(\gamma ),D^{g}_{H}x(\gamma ))\mathrm{d}\gamma } \right) \mathrm{d} \tau }\right) . \end{aligned}$$ - (iv)
Let x(t) and \(D^{g}_{H}x(t)\) be \((FH^{g2})\)- differentiable. Then, from Eq. (3), we have equivalently
$$\begin{aligned} D^{g}_{H}x (t)= & {} C_{1}\ominus (-1)\int _{t_0}^{t} {f(\gamma ,x(\gamma ),D^{g}_{H}x(\gamma ))\mathrm{d}\gamma }\\&\hbox { and thus}\\ x(t)= & {} C_{2} \ominus (-1)\left( C_{1}t \ominus (-1) \int _{t_0}^{t} \right. \\&\times \left. {\left( \int _{t_0}^{\tau } {f(\gamma ,x(\gamma ),D^{g}_{H}x(\gamma ))\mathrm{d}\gamma } \right) \mathrm{d} \tau } \right) . \end{aligned}$$
\(\square \)
Remark 2
After getting the general solution from Theorem 3, we will apply boundary conditions (4) to determine the values \(C_{1},C_{2}.\)
3.2 Solving the MBVP for FSDEs by Zadeh’s extension principle
We get the multi-point boundary value problem [with boundary condition (4)] for fuzzy second-order inhomogeneous linear differential equations under generalized Hukuhara differentiability (MBVP for FSIDEs):
where \(r(t) \in E^{1}\) and \( p(t), q(t) \in {\mathbb {R}}^{+} \) are continuous positive real functions. So we make a small substitution in the Equation (3) (that means we replace \(f(t, x(t), D^{g}_{H}x(t))=(-1) [p(t)D^{g}_{H}x(t)+q(t)x(t)] +r(t)\)).
Definition 6
A fuzzy function \(x\in C^{2}([t_{0},T],E^{1})\) is called a solution of MBVP for FSIDEs (4)–(5) if:
- (i)
x(t) and \(D^{g}_{H}x(t)\) are (\(FH^{gi}\))-differentiable functions for \(i =1, 2\), that \(D^{2,g}_{H}x(t)\) will be one of the terms in Theorem 2;
- (ii)
x(t) and \(D^{g}_{H}x(t)\) satisfy MBVP for FSIDEs (4)–(5) .
Remark 3
In this subsection, we shall establish the explicit solution to MBVP for FSIDEs (4)–(5) . Our strategy of solving MBVP for FSIDEs (4)–(5) is based on the choice of the derivative in the fuzzy differential equation, such that we have two kinds of \(D^{g}_{H}x(t)\) (it is \((FH^{g1})\)-differentiable or is \((FH^{g2})\)-differentiable).
Other than (5), we can consider many other models, for example \(D^{2,g}_{H}x(t)+ p(t)D^{g}_{H}x(t)+q(t)x(t) = r(t) (*).\) The fuzzy second-order differential equations under generalized Hukuhara differentiability (5) and (*) are not equivalent. But we have the following Theorem.
Theorem 4
From the MBVP for FSIDEs (4)–(5) on \([t_{0}, T] \) with the real functions p(t) and q(t) are to define the sign that means sign does not change on \((t_{0},T)\), then we get the MBVP for four systems of real ordinary differential equations (SRODEs).
Proof
In order to solve MBVP for FSIDEs (4)–(5), we have three steps: first we choose the type of derivative and change problem MBVP for FSIDEs (4)–(5) to a system of real ordinary differential equations (SRODEs) by using Theorem 2; second we solve the obtained SRODEs; the final step is to find such a domain in which the solution and its derivatives have valid sets. By using Theorems 1 and 2, each \( x\left( {\text {t}} \right) \in {E^1}\) corresponds to \({\left[ {x\left( {\text {t}} \right) } \right] ^\alpha } = \left[ {\underline{{ x}} \left( {{\text {t,}}\alpha } \right) ,{\bar{x}}\left( {{\text {t,}}\alpha } \right) } \right] .\)
If \(x\left( {\text {t}} \right) \) is \(FH^{g1}\) then \({\left[ {D_H^gx\left( {\text {t}} \right) } \right] ^\alpha } = \left[ {\underline{{ x}} '\left( {{\text {t,}}\alpha } \right) ,{\bar{x}}'\left( {{\text {t,}}\alpha } \right) } \right] ;\)
If \(\left[ {D_H^gx\left( {\text {t}} \right) } \right] ^\alpha \) is \(FH^{g1}\) then \({\left[ {D_H^{2g}x\left( {\text {t}} \right) } \right] ^\alpha } = \left[ {\underline{{ x}} ''\left( {{\text {t,}}\alpha } \right) ,{\bar{x}}''}\right. \)\(\left. {\left( {{\text {t,}}\alpha } \right) } \right] ;\)
If \(\left[ {D_H^gx\left( {\text {t}} \right) } \right] ^\alpha \) is \(FH^{g2}\) then \({\left[ {D_H^{2g}x\left( {\text {t}} \right) } \right] ^\alpha } = \left[ {{\bar{x}}''}\right. \)\(\left. {\left( {{\text {t,}}\alpha } \right) ,\underline{{ x}} ''\left( {{\text {t,}}\alpha } \right) } \right] .\)
Totally similar :
If \(x\left( {\text {t}} \right) \) is \(FH^{g2}\) then \({\left[ {D_H^gx\left( {\text {t}} \right) } \right] ^\alpha } = \left[ {\bar{x} '\left( {{\text {t,}}\alpha } \right) ,\underline{{ x}}'\left( {{\text {t,}}\alpha } \right) } \right] ;\)
If \(\left[ {D_H^gx\left( {\text {t}} \right) } \right] ^\alpha \) is \(FH^{g1}\) then \({\left[ {D_H^{2g}x\left( {\text {t}} \right) } \right] ^\alpha } = \left[ {{\bar{x}}''}\right. \)\(\left. {\left( {{\text {t,}}\alpha } \right) ,\underline{{ x}} ''\left( {{\text {t,}}\alpha } \right) } \right] ;\)
If \(\left[ {D_H^gx\left( {\text {t}} \right) } \right] ^\alpha \) is \(FH^{g2}\) then \({\left[ {D_H^{2g}x\left( {\text {t}} \right) } \right] ^\alpha }\) =\(\left[ \underline{ x} ''\left( \text {t,}\alpha \right) , {\bar{x}}''\left( \text {t,}\alpha \right) \right] .\)
So, from The MBVP for FSIDEs (4)–(5), we have four \(\alpha -\)level set problems, as follows:
Case 1x(t) and \(D^{g}_{H}x(t)\) are \(FH^{g1}\)-differentiable functions
Case 2x(t) is \(FH^{g1}\)-differentiable and \(D^{g}_{H}x(t)\) is \(FH^{g2}\)-differentiable functions
Case 3x(t) is \(FH^{g2}\)-differentiable and \(D^{g}_{H}x(t)\) is \(FH^{g1}\)-differentiable functions
Case 4x(t) and \(D^{g}_{H}x(t)\) are \(FH^{g2}\)-differentiable functions
Finally, we get the MBVP for four systems of real ordinary differential equations (SRODEs), as follows.
- (i)
\(p(t),\ q(t)\in {\mathbb {R}}^{-}:\)
Case 1x(t) and \(D^{g}_{H}x(t)\) are \(FH^{g1}\)-differentiable functions
$$\begin{aligned} (I) \left\{ \begin{array}{l} \underline{x}^{''}(t,\alpha )=- p(t)\underline{x}^{'}(t,\alpha )- q(t)\underline{x}(t,\alpha )+\underline{r}(t,\alpha ),\\ \overline{x}^{''}(t,\alpha )=- p(t)\overline{x}^{'}(t,\alpha )- q(t)\overline{x}(t,\alpha )+\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \overline{x}^{'}(t_{0},\alpha )+ \underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha )+\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\underline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha )+ \underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha )+ \overline{\gamma }_{2}(\alpha ), \end{array} \right. \end{aligned}$$Case 2x(t) is \(FH^{g1}\)-differentiable and \(D^{g}_{H}x(t)\) is \(FH^{g2}\)-differentiable functions
$$\begin{aligned} (II) \left\{ \begin{array}{l} \overline{x}^{''}(t,\alpha )=-p(t)\underline{x}^{'}(t,\alpha )-q(t)\underline{x}(t,\alpha )+\underline{r}(t,\alpha ),\\ \underline{x}^{''}(t,\alpha )=-p(t)\overline{x}^{'}(t,\alpha )- q(t)\overline{x}(t,\alpha )+\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \overline{x}^{'}(t_{0},\alpha )+\underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha ) +\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\underline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha )+\underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha ) +\overline{\gamma }_{2}(\alpha ),\\ \end{array} \right. \end{aligned}$$Case 3x(t) is \(FH^{g2}\)-differentiable and \(D^{g}_{H}x(t)\) is \(FH^{g1}\)-differentiable functions
$$\begin{aligned} (III) \left\{ \begin{array}{l} \overline{x}^{''}(t,\alpha )=-p(t)\overline{x}^{'}(t,\alpha )-q(t)\underline{x}(t,\alpha ) +\underline{r}(t,\alpha ),\\ \underline{x}^{''}(t,\alpha )=-p(t)\underline{x}^{'}(t,\alpha )- q(t)\overline{x}(t,\alpha ) +\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha ) + \underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \overline{x}^{'}(t_{0},\alpha ) +\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\underline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha )+\underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha )+ \overline{\gamma }_{2}(\alpha ),\\ \end{array} \right. \end{aligned}$$Case 4x(t) and \(D^{g}_{H}x(t)\) are \(FH^{g2}\)-differentiable functions
$$\begin{aligned} (IV) \left\{ \begin{array}{l} \underline{x}^{''}(t,\alpha )=-p(t)\overline{x}^{'}(t,\alpha )- q(t)\underline{x}(t,\alpha ) +\underline{r}(t,\alpha ),\\ \overline{x}^{''}(t,\alpha )=-p(t)\underline{x}^{'}(t,\alpha )- q(t)\overline{x}(t,\alpha ) +\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha )+ \underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha ) +\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha ) +\underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha )+ \overline{\gamma }_{2}(\alpha ).\\ \end{array} \right. \end{aligned}$$ - (ii)
\(p(t),\ q(t)\in {\mathbb {R}}^{+}:\)
Case 1x(t) and \(D^{g}_{H}x(t)\) are \(FH^{g1}\)-differentiable functions
$$\begin{aligned} (I) \left\{ \begin{array}{l} \underline{x}^{''}(t,\alpha )=- p(t)\overline{x}^{'}(t,\alpha )- q(t)\overline{x}(t,\alpha )+\underline{r}(t,\alpha ),\\ \overline{x}^{''}(t,\alpha )=- p(t)\underline{x}^{'}(t,\alpha )- q(t)\underline{x}(t,\alpha )+\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \overline{x}^{'}(t_{0},\alpha )+ \underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha )+\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\underline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha )+ \underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha )+ \overline{\gamma }_{2}(\alpha ),\\ \end{array} \right. \end{aligned}$$Case 2x(t) is \(FH^{g1}\)-differentiable and \(D^{g}_{H}x(t)\) is \(FH^{g2}\)-differentiable functions
$$\begin{aligned} (II) \left\{ \begin{array}{l} \overline{x}^{''}(t,\alpha )=-p(t)\overline{x}^{'}(t,\alpha )-q(t)\underline{x}(t,\alpha )+\underline{r}(t,\alpha ),\\ \underline{x}^{''}(t,\alpha )=-p(t)\underline{x}^{'}(t,\alpha )- q(t)\overline{x}(t,\alpha )+\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \overline{x}^{'}(t_{0},\alpha )+\underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha ) +\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\underline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha )+\underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha ) +\overline{\gamma }_{2}(\alpha ),\\ \end{array} \right. \end{aligned}$$Case 3x(t) is \(FH^{g2}\)-differentiable and \(D^{g}_{H}x(t)\) is \(FH^{g1}\)-differentiable functions
$$\begin{aligned} (III) \left\{ \begin{array}{l} \overline{x}^{''}(t,\alpha )=-p(t)\underline{x}^{'}(t,\alpha )-q(t)\underline{x}(t,\alpha ) +\underline{r}(t,\alpha ),\\ \underline{x}^{''}(t,\alpha )=-p(t)\overline{x}^{'}(t,\alpha )- q(t)\overline{x}(t,\alpha ) +\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha ) + \underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \overline{x}^{'}(t_{0},\alpha ) +\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\underline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha )+\underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha )+ \overline{\gamma }_{2}(\alpha ),\\ \end{array} \right. \end{aligned}$$Case 4x(t) and \(D^{g}_{H}x(t)\) are \(FH^{g2}\)-differentiable functions
$$\begin{aligned} (IV) \left\{ \begin{array}{l} \underline{x}^{''}(t,\alpha )=-p(t)\underline{x}^{'}(t,\alpha )- q(t)\overline{x}(t,\alpha ) +\underline{r}(t,\alpha ),\\ \overline{x}^{''}(t,\alpha )=-p(t)\overline{x}^{'}(t,\alpha )- q(t)\underline{x}(t,\alpha ) +\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha )+ \underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha ) +\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha ) +\underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha )+ \overline{\gamma }_{2}(\alpha ).\\ \end{array} \right. \end{aligned}$$ - (iii)
\(p(t)\in {\mathbb {R}}^{+},\ q(t)\in {\mathbb {R}}^{-}:\)
Case 1x(t) and \(D^{g}_{H}x(t)\) are \(FH^{g1}\)-differentiable functions
$$\begin{aligned} (I) \left\{ \begin{array}{l} \underline{x}^{''}(t,\alpha )=- p(t)\overline{x}^{'}(t,\alpha )- q(t)\underline{x}(t,\alpha )+\underline{r}(t,\alpha ),\\ \overline{x}^{''}(t,\alpha )=- p(t)\underline{x}^{'}(t,\alpha )- q(t)\overline{x}(t,\alpha )+\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \overline{x}^{'}(t_{0},\alpha )+ \underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha )+\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\underline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha )+ \underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha )+ \overline{\gamma }_{2}(\alpha ),\\ \end{array} \right. \end{aligned}$$Case 2x(t) is \(FH^{g1}\)-differentiable and \(D^{g}_{H}x(t)\) is \(FH^{g2}\)-differentiable functions
$$\begin{aligned} (II) \left\{ \begin{array}{l} \overline{x}^{''}(t,\alpha )=-p(t)\overline{x}^{'}(t,\alpha )-q(t)\underline{x}(t,\alpha )+\underline{r}(t,\alpha ),\\ \underline{x}^{''}(t,\alpha )=-p(t)\underline{x}^{'}(t,\alpha )- q(t)\overline{x}(t,\alpha )+\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \overline{x}^{'}(t_{0},\alpha )+\underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha ) +\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\underline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha )+\underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha ) +\overline{\gamma }_{2}(\alpha ),\\ \end{array} \right. \end{aligned}$$Case 3x(t) is \(FH^{g2}\)-differentiable and \(D^{g}_{H}x(t)\) is \(FH^{g1}\)-differentiable functions
$$\begin{aligned} (III) \left\{ \begin{array}{l} \overline{x}^{''}(t,\alpha )=-p(t)\underline{x}^{'}(t,\alpha )-q(t)\underline{x}(t,\alpha ) +\underline{r}(t,\alpha ),\\ \underline{x}^{''}(t,\alpha )=-p(t)\overline{x}^{'}(t,\alpha )- q(t)\overline{x}(t,\alpha ) +\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha ) + \underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \overline{x}^{'}(t_{0},\alpha ) +\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\underline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha )+\underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha )+ \overline{\gamma }_{2}(\alpha ),\\ \end{array} \right. \end{aligned}$$Case 4x(t) and \(D^{g}_{H}x(t)\) are \(FH^{g2}\)-differentiable functions
$$\begin{aligned} (IV) \left\{ \begin{array}{l} \underline{x}^{''}(t,\alpha )=-p(t)\underline{x}^{'}(t,\alpha )- q(t)\underline{x}(t,\alpha ) +\underline{r}(t,\alpha ),\\ \overline{x}^{''}(t,\alpha )=-p(t)\overline{x}^{'}(t,\alpha )- q(t)\overline{x}(t,\alpha ) +\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha )+ \underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha ) +\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha ) +\underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha )+ \overline{\gamma }_{2}(\alpha ).\\ \end{array} \right. \end{aligned}$$ - (iv)
\(p(t)\in {\mathbb {R}}^{-},\ q(t)\in {\mathbb {R}}^{+}:\)
Case 1x(t) and \(D^{g}_{H}x(t)\) are \(FH^{g1}\)-differentiable functions
$$\begin{aligned} (I) \left\{ \begin{array}{l} \underline{x}^{''}(t,\alpha )=- p(t)\underline{x}^{'}(t,\alpha )- q(t)\overline{x}(t,\alpha )+\underline{r}(t,\alpha ),\\ \overline{x}^{''}(t,\alpha )=- p(t)\overline{x}^{'}(t,\alpha )- q(t)\underline{x}(t,\alpha )+\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \overline{x}^{'}(t_{0},\alpha )+ \underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha )+\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\underline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha )+ \underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha )+ \overline{\gamma }_{2}(\alpha ),\\ \end{array} \right. \end{aligned}$$Case 2x(t) is \(FH^{g1}\)-differentiable and \(D^{g}_{H}x(t)\) is \(FH^{g2}\)-differentiable functions
$$\begin{aligned} (II) \left\{ \begin{array}{l} \overline{x}^{''}(t,\alpha )=-p(t)\underline{x}^{'}(t,\alpha )-q(t)\overline{x}(t,\alpha )+\underline{r}(t,\alpha ),\\ \underline{x}^{''}(t,\alpha )=-p(t)\overline{x}^{'}(t,\alpha )- q(t)\underline{x}(t,\alpha )+\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \overline{x}^{'}(t_{0},\alpha )+\underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha ) +\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\underline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha )+\underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha ) +\overline{\gamma }_{2}(\alpha ),\\ \end{array} \right. \end{aligned}$$Case 3x(t) is \(FH^{g2}\)-differentiable and \(D^{g}_{H}x(t)\) is \(FH^{g1}\)-differentiable functions
$$\begin{aligned} (III) \left\{ \begin{array}{l} \overline{x}^{''}(t,\alpha )=-p(t)\overline{x}^{'}(t,\alpha )-q(t)\overline{x}(t,\alpha ) +\underline{r}(t,\alpha ),\\ \underline{x}^{''}(t,\alpha )=-p(t)\underline{x}^{'}(t,\alpha )- q(t)\underline{x}(t,\alpha ) +\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha ) + \underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \overline{x}^{'}(t_{0},\alpha ) +\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\underline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha )+\underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha )+ \overline{\gamma }_{2}(\alpha ),\\ \end{array} \right. \end{aligned}$$Case 4x(t) and \(D^{g}_{H}x(t)\) are \(FH^{g2}\)-differentiable functions
$$\begin{aligned} (IV) \left\{ \begin{array}{l} \underline{x}^{''}(t,\alpha )=-p(t)\overline{x}^{'}(t,\alpha )- q(t)\overline{x}(t,\alpha ) +\underline{r}(t,\alpha ),\\ \overline{x}^{''}(t,\alpha )=-p(t)\underline{x}^{'}(t,\alpha )- q(t)\underline{x}(t,\alpha ) +\overline{r}(t,\alpha ),\\ \alpha _{11}\underline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha )+ \underline{\gamma }_{1}(\alpha ),\\ \alpha _{11}\overline{x}(t_{0},\alpha ) =-\alpha _{12} \underline{x}^{'}(t_{0},\alpha ) +\overline{\gamma }_{1}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \overline{x}^{'}(T,\alpha ) +\underline{\gamma }_{2}(\alpha ),\\ \alpha _{21}\overline{x}(T,\alpha ) =-\alpha _{22} \underline{x}^{'}(T,\alpha )+ \overline{\gamma }_{2}(\alpha ).\\ \end{array} \right. \end{aligned}$$
\(\square \)
Remark 4
If we ensure that the solutions \([\underline{x}(t,\alpha ),\overline{x}(t,\alpha )]\) of the real multi-point boundary problems (I, II, III, IV) corresponding to the values of p(t) and q(t) satisfy the first-order and second-order derivatives \([\underline{x}^{'}(t,\alpha ),\overline{x}^{'}(t,\alpha )],\)
\([\underline{x}^{''}(t,\alpha ),\overline{x}^{''}(t,\alpha )]\) are valid level sets of fuzzy functions with two kinds differentiability, respectively, then we can construct the solution of problem MBVP for FSIDEs (4)–(5). In addition, if this solution satisfies the Definition 6, then it is solution of problem MBVP for FSIDEs (4)–(5).
So every form (5) or (*) in Remark 3, we always get the MBVPs for four systems of real ordinary differential equations, which are the conclusions of Theorem 4.
3.3 Solving the MBVP for FSDEs by real Green’s function
In this subsection, we will build the real Green’s function method to solve for the multi-point boundary value problem for fuzzy second-order inhomogeneous linear differential equations under generalized Hukuhara differentiability (MBVP for FSIDEs) (4)–(5). Because it is very difficult to build a fuzzy-valued Green’s function, so we will build real Green’s function for each certain multi-point boundary value problem.
We will consider the boundary condition (4) with a special case when \(\gamma _{1}=\gamma _{2}= \theta ^{1}\in E^{1},\) the MBVP for FSIDEs (5) is a following form:
where \(\alpha _{11},\alpha _{12},\alpha _{21},\alpha _{22}\in {\mathbb {R}}^{+} \) with \(\alpha _{11}^{2}+\alpha _{12}^{2}\ne 0,\ \alpha _{21}^{2}+\alpha _{22}^{2}\ne 0\).
Remark 5
In the case when \(\gamma _{1}=\gamma _{2}= \theta ^{1}\in E^{1},\) we cannot write the multi-point boundary conditions (4) under form:
because the sum of two fuzzy sets is always different of \(\theta ^{1}.\)
Now, we will proceed find a real Green’s function. So that this Green’s function must fit with the purpose of posing problem. We will transform the \(\alpha \)-level sets problem MBVP (6) for FSIDEs (5) become the real-value problem with method as follows.
We denote \([x(t)]^{\alpha }=[\underline{x}(t,\alpha ),\overline{x}(t,\alpha )],\)\([D_{H}^{g}x(t)]^{\alpha }=[\underline{x}^{'}(t,\alpha ),\overline{x}^{'}(t,\alpha )],\)\( [D^{2,g}_{H}x(t)]^{\alpha } =[ \overline{x}^{''}(t,\alpha ), \underline{x}^{''}(t, \alpha )]\). Hence, from MBVP (6) for FSIDEs (5), we obtain
Putting \({\tilde{v}}(t)=\frac{ \underline{x}(t,\alpha =0)+\overline{x}(t,\alpha =0)}{2}, {\tilde{r}}(t)=\frac{ \underline{r}(t,\alpha =0)+\overline{r}(t,\alpha =0)}{2}\) , we will transform the \(\alpha \)-level sets problem (7)–(8) become the real-value problem the following form.
Note: with putting above, we choose \(\alpha =0\), so that lose \(\alpha \) in (9)–(10).
Finally, we will find real Green’s function of real-value problem (9)–(10).
Remark 6
By the method above, we will find a appropriate real Green’s function for MBVP that we are considering.
Consider the multi-point boundary value problem for fuzzy second-order inhomogeneous linear differential equations under generalized Hukuhara differentiability (MBVP for FSIDEs) .
where \( r(t) \in E^{1}, r(t)\ne \theta ^{1}\) and \( p(t), q(t) \in {\mathbb {R}} \) are continuous real functions, with the multi-point boundary conditions
where \(\gamma _{1}, \gamma _{2} \in E^{1}\) , \(\alpha _{11},\alpha _{12},\alpha _{21},\alpha _{22}\in {\mathbb {R}}^{+} \) with \(\alpha _{11}^{2}+\alpha _{12}^{2}\ne 0,\ \alpha _{21}^{2}+\alpha _{22}^{2}\ne 0\) and \(\gamma _{1},\gamma _{2}\ne \theta ^{1}.\)
Theorem 5
A general solution of MBVP for FSIDEs (11)–(12) will be under form:
where r(s) is fuzzy function in (11), z(t) is general solution of FSIDEs (11) with the real Green’s function G(t, s), that will be defined by:
where \( u_{1}(t),u_{2}(t) \) are two linearly independent real solutions of homogeneous real differential equations of the form \( {\tilde{u}}^{''}(t)+p(t){\tilde{u}}^{'}(t)+q(t){\tilde{u}}(t) =0\) where \({\tilde{u}}(t)=\frac{ \underline{x}(t,\alpha =0)+\overline{x}(t,\alpha =0)}{2}\) , and w(t) is Wronskian determinant of \( u_{1}(t),u_{2}(t) \).
Proof
A solution of Eq. (11) of the form \( x(t)=y(t)+z(t) \) where
with the multi-point boundary real conditions
and
with the multi-point boundary conditions
Now, we find the real Green’s function for equation (15)–(16).
Putting \({\tilde{v}}(t)=\frac{ \underline{y}(t,\alpha =0)\!+\!\overline{y}(t,\alpha =0)}{2},\ {\tilde{r}}(t)=\frac{ \underline{r}(t,\alpha =0)+\overline{r}(t,\alpha =0)}{2},\) we will transform the \(\alpha \)-level sets problem of (15)–(16) become the real-value problem similar form (15)–(16). The real Green’s function of (15)–(16) must satisfy
with the multi-point boundary real conditions
The continuity and jump conditions are
Let \( u_{1} (t)\) and \( u_{2}(t) \) be two linearly independent solutions of the boundary problem for real homogeneous equation of the form \( {\tilde{v}}^{''}(t)+p(t){\tilde{v}}^{'}(t)+q(t){\tilde{v}}(t) = 0\) with \({\tilde{v}}(t)=\frac{ \underline{y}(t,\alpha =0)+\overline{y}(t,\alpha =0)}{2}\). The non-vanishing of the Wronskian ensures that these solutions exist. Let w(t) denote the Wronskian of \( u_{1} (t)\) and \( u_{2}(t). \) Since the homogeneous equation with homogeneous boundary conditions has only the trivial solution, w(t) is nonzero on \( [t_{0}, T]\). The real Green’s function has the form
The continuity and jump conditions for real Green’s function gives us the equations
by solving this system, the solution is
Thus, the real Green’s function is
The special solution for equation (15) is
Note: r(s) is fuzzy function in (15). Thus, if there is a unique solution for (17)–(18), then the general solution for (11)–(12) is
\(\square \)
Theorem 6
Let \(f : [t_{0},T] \times E^{1}\times E^{1}\rightarrow E^{1}\) is a continuous function, we suppose that there exist \(L_1, L_2 \in {\mathbb {R}}+\) such that
for all \( t \in [a,b], x(t),D^{g}_{H}x(t), y(t), D^{g}_{H}x(t) \in E^{1},\) where the real numbers \(L_1, L_2\) such that
with \(D_{0}^* [x,y] = \mathop {max}\limits _{t_{0} \leqslant t \leqslant T} \left\{ {L_1.D_{0}[x(t),y(t)] + L_2.D_{0}}\right. \)\(\left. {[D^{g}_{H}x(t),D^{g}_{H}y(t)]} \right\} ,\) the real Green’s function G(t, s) that is defined by (22) is to define the sign (that means sign does not changes on \((t_{0},T)),\) and it is exists \(M > 0\) such that \(\left| {G(t,s)} \right| \le M, \ \forall s,t \in [t_{0},T].\) then the MBVP for FSDEs (3)–(4) has a unique solution on \([t_{0},T]\) under form:
where z(t) is a general solution of the fuzzy second-order homogeneous linear differential equations (FSHDEs) .
Proof
Supporting that the operator
with:
We have
In this formula, the real Green function can be marked differently, so we have to look at each specific case, for example, see the Illustrations in below by Example 1 and Example 2 (In the particular case, finding the real Green function is much simpler than the general this Theorem 6).
By formula 2, we have
where the Hausdorff metric \(D_{0}\left[ S(x(t)) ,S(y(t)) \right] \) by formula 2, that means:
with \(A= [S(x(t)) ]^\alpha , B= [S(y(t)) ]^\alpha \) for each case, when the function Green is:
- (i)
\(G(t,s) >0;\)
- (ii)
\(G(t,s) <0;\)
where \({D_{0}^*}[x,y] = \mathop {max}\limits _{t_{0} \leqslant t \leqslant T} \left\{ {L_1.D_{0}[x(t),y(t)] + L_2.}\right. \)\(\left. {D_{0}[D^{g}_{H}x(t),D^{g}_{H}y(t)]} \right\} .\) Therefore
S is contractive operator and \( x(t) \in C^1([t_{0},T],E^{1})\) is a fixed point. This solution x(t) of MBVP for FSDEs (3)–(4) is:
\(\square \)
Remark 7
In this method, when we change the conditions of the problem, we must find a, respectively, Green’s function.
Particularly, we consider the most simple FSDEs [with \(\alpha _{12}= \alpha _{22}=0,\) and \(\alpha _{11}= \alpha _{21}=1 \), we have two-point boundary value problem, there are several studies published on this two-point boundary value problems (Bede 2006; Khastan and Nieto 2010; Lakshmikantham et al. 2001; O’Regan et al. 2003)]:
where \( h(t)\in E^{1}\) is a fuzzy function with two-point boundary conditions:
where \( \gamma _{1}, \gamma _{2} \in E^{1}\), with \(\gamma _{1},\gamma _{2}\ne \theta ^{1}\).
Theorem 7
A general solution of MBVP for FSDEs (27)–(28) will be under form:
where h(s) is fuzzy function in (27), z(t) is general solution of fuzzy differential equations (27) in the case \(h(t)=\theta ^{1}\) and the real Green’s function G(t, s) will defined by:
Proof
Similar to the proof of the theorem (5), we find the real Green’s function for equation of the form.
we have \([h(t)]^{\alpha }=[\underline{h}(t,\alpha ),\overline{h}(t,\alpha )],\ [D^{2,g}_{H}y(t)]^{\alpha } =[\underline{y}^{''}(t, \alpha ) ,\)\( \overline{y}^{''}(t,\alpha )]\). Hence from (31), we obtain
Putting \({\tilde{m}}(t)=\frac{\underline{y}(t,\alpha =0)+\overline{y}(t,\alpha =0)}{2}\) and \({\tilde{h}}(t)=\)\(\frac{\underline{h}(t,\alpha =0)+\overline{h}(t,\alpha =0)}{2}\), we will transform the (32) \(\alpha \)-level sets problem become the real-value problem of the form
A pair of solution to the homogeneous real differential equations (33) are \( {\tilde{m}}_{1}(t)=1 \) and \( {\tilde{m}}_{2}(t)=t \) .
The real Green’s function satisfies
The real Green’s function has the form
Applying the boundary conditions \( G(t_{0},s) = G(T,s) = 0 \), we see that \( c_{1}= -c_{2}t_{0} \) and \( d_{1}= -d_{2}T. \) The real Green’s function now has the form
Since the real Green’s function must be continuous,
from the jump condition,
we get \( c_{2}=\frac{(s-t_{0})}{(T-t_{0})}\). Thus, the real Green’s function is
The special solution for equation (31) is
Note: h(s) is fuzzy function in (31). Thus, if the fuzzy differential equation subject to the inhomogeneous boundary conditions (28) has the unique solution z(t), the general solution for (27)–(28) is
\(\square \)
Remark 8
In the case, when the fuzzy functions x(t) and \(D^{g}_{H}x(t)\) are \(FH^{g2}\)-differentiable functions we have solved the MBVP for FSDEs (4)–(5) analogously prove the case, when the interval-valued functions x(t) and \(D^{g}_{H}x(t)\) are \(FH^{g1}\)-differentiable functions. For this case, we have some illustrations, see example 1 below .
4 Illustrations
In this section, we shall present some example being illustrations of the theory of the multi-point boundary value problem (MBVP) for fuzzy second-order differential equations (FSDEs) under generalized Hukuhara differentiability (or fuzzy multi-point boundary value problem-FMBVP).
Example 1
Let us start the illustrations by considering the followings MBVP for FSDEs:
with multi-point boundary conditions :
where \( x(0) = (-4,0,4), x(1) = (0,1,2) \) are the triangular fuzzy numbers.
(a) By Zadeh’s extension principle method, we find solution of MBVP for FSDEs (41)–(42):
(In the problem, from (4)–(5)) and remark (1), we see \(p(t)=q(t)=0\) and \(\alpha _{12}=\alpha _{22}=0\)).
Case 1 From FMBVP (41)–(42), we get
By solving (43), we obtain
where \(\alpha \in [0,1]\). Since x(t) and \(D_{H}^{g}x(t)\) are not \((FH^{g1})\)-differentiable, there is no \((FH^{g1}-FH^{g1})\)-solution in this case.
Case 2 From FMBVP (41)–(42), we get
By solving (45), we obtain
Since x(t) is not \((FH^{g1})\)-differentiable, there is no \((FH^{g1}-FH^{g2})\)-solution in this case.
Case 3 From FMBVP (41)–(42), we get
By solving (47), we obtain
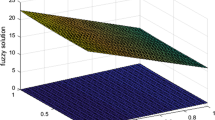
where \(\alpha \in [0,1]\). Notice that, in this cases, since x(t) is \((FH^{g2})\)-differentiable and \(D_{H}^{g}x(t)\) is \((FH^{g1})\)-differentiable. Hence, there is a \((FH^{g2}-FH^{g1})\)-solution in this case. This solution is shown in Fig. 1 (result illustrate 2-Dimensional with \(\alpha =0.5\)) and in Fig. 2 (result illustrate 3-Dimensional). Moreover, we use MATLAB software to numerical simulation for this solution, with \(\alpha =0,\ \alpha =0.25,\ \alpha =0.5\) and \(\alpha =0.75\).

Form-2D of (\(FH^{g2} -FH^{g1}\))-solution of Example 1 in Case 3

Form-3D of (\(FH^{g2} -FH^{g1}\))-solution of Example 1 in Case 3
Case 4 From FMBVP (41)–(42), we get
By solving (49), we obtain
where \(\alpha \in [0,1]\). Since x(t) and \(D_{H}^{g}\) are \((FH^{g2})\)-differentiable, there is \((FH^{g2}-FH^{g2})\)-solution in this case. This solution is shown in Fig. 3 (result illustrate 2-Dimensional with \(\alpha =0.5\)) and in Fig. 4 (result illustrate 3-Dimensional). Moreover, we use MATLAB software to numerical simulation for this solution, with \(\alpha =0,\ \alpha =0.25,\ \alpha =0.5\) and \(\alpha =0.75\).

Form-2D of (\(FH^{g2} - FH^{g2}\))-solution of Example 1 in Case 4

Form-3D of (\(FH^{g2} - FH^{g2}\))-solution of Example 1 in Case 4
(b) By Hukuhara integrals method, we find solution of MBVP for FSDEs (41)–(42):
Case 1 Apply Theorem (3) for MBVP (41)–(42) with x(t) and \(D^{g}_{H}x(t)\) is \((FH^{g1})\)-differentiable, integrating the (41) fuzzy differential equation twice yields, we get \([x(t)]^{\alpha }=\Big [ \frac{t^{4}}{12}(\alpha -1)+C_{1}(\alpha )t+C_{2}(\alpha ),\ -e^{t}(\alpha -1)+C_{3}(\alpha )t+C_{4}(\alpha ) \Big ]\), applying the boundary condition, we find that the solution is \([x(t)]^{\alpha }= \Big [ \frac{t^{4}}{12}(\alpha -1)+\frac{t}{12}(49-37\alpha )+4\alpha -4,\ t(2\alpha +e(\alpha -1)-1)-3\alpha -e^{t}(\alpha -1)+3 \Big ]\) is not \(FH^{g1}\)-differentiable, there is no solution in this case.
Case 2 Apply Theorem (3) for MBVP (41)–(42) with x(t) is \((FH^{g1}) \)-differentiable, and \(D^{g}_{H}X(t)\) is \((FH^{g2})\)-differentiable, integrating the (41) fuzzy differential equation twice yields, we get \([x(t)]^{\alpha }=\Big [ -e^{t}(\alpha -1)+C_{1}(\alpha )t+C_{2}(\alpha ),\ \frac{t^{4}}{12}(\alpha -1)+C_{1}(\alpha )t+C_{2}(\alpha ) \Big ]\), applying the boundary condition, we find that the solution is \([x(t)]^{\alpha }= \Big [ t(2\alpha +e(\alpha -1)-1)-3\alpha -e^{t}(\alpha -1)+3,\ \frac{t^{4}}{12}(\alpha -1)+\frac{t}{12}(49-37\alpha )+4\alpha -4 \Big ]\) is not \(FH^{g1}\)-differentiable, there is no solution in this case.
Case 3 Apply Theorem (3) for MBVP (41)–(42) with x(t) is \((FH^{g2}) \)-differentiable, and \(D^{g}_{H}X(t)\) is \((FH^{g1})\)-differentiable, integrating the (41) fuzzy differential equation twice yields, we get \([x(t)]^{\alpha }= \Big [ t(2\alpha +e(\alpha -1)-1)-3\alpha -e^{t}(\alpha -1)+3,\ \frac{t^{4}}{12}(\alpha -1)+\frac{t}{12}(49-37\alpha )+4\alpha -4 \Big ]\).
Case 4 Apply Theorem (3) for MBVP (41)–(42) with x(t) and \(D^{g}_{H}x(t)\) is \((FH^{g2})\)-differentiable, integrating the (41) fuzzy differential equation twice yields, we get \([x(t)]^{\alpha }= \Big [ \frac{t^{4}}{12}(\alpha -1)+\frac{t}{12}(49-37\alpha )+4\alpha -4,\ t(2\alpha +e(\alpha -1)-1)-3\alpha -e^{t}(\alpha -1)+3 \Big ]\).
(c) By the real Green’s function method we find solution of MBVP for FSDEs (41)–(42):
Case 3 By Theorem (7) general solution of MBVP for FSDEs (41)–(42) under form:
where the real Green’s function G(t, s) will be defined by (30) and z(t) is general solution of homogeneous fuzzy differential equation.
Thus, the Green’s function G(t, s) will be defined by:
and we have
applying the boundary condition (42), we find that the solution is
Case 4 Similar case 3. However, in this case x(t) and \(D^{g}_{H}x(t)\) are \(FH^{g2}\)-differentiable. Thus, By Theorem (7) general solution of MBVP for FSDEs (41)–(42) under form:
where the real Green’s function G(t, s) will be defined by (30) and z(t) is general solution of homogeneous fuzzy differential equation.
Thus the Green’s function G(t, s) will be defined by:
and we have
applying the boundary condition (42), we find that the solution is
Case 1 Similar results case 4. However \([x(t)]^{\alpha }= \Big [ \frac{t^{4}}{12}(\alpha -1)+\frac{t}{12}(49-37\alpha )+4\alpha -4,\ -e^{t}(\alpha -1)+t(2\alpha +e(\alpha -1)-1)-3\alpha +3 \Big ]\) is not \(H^{g1}\)-differentiable, there is no solution in this case.

Form-2D of (\(FH^{g1} - FH^{g1}\))-solution of Example 2 in Case 1

Form-3D of (\(FH^{g1} - FH^{g1}\))-solution of Example 2 in Case 1
Case 2 Similar results case 3. However \([x(t)]^{\alpha }= \Big [ t(e(\alpha -1)-4\alpha +5)-e^{t}(\alpha -1)-5+5\alpha ,\ \frac{t^{4}}{12}(\alpha -1)+\frac{t}{12}(35\alpha -23)-4\alpha +4 \Big ] \) is not \(H^{g1}\)-differentiable, there is no solution in this case.
Example 2
Solve the followings MBVP for FSIDEs:
with multi-point boundary conditions:
(a) By Zadeh’s extension principle method, we find solution of MBVP for FSDEs (55)–(56):
(In this problem, from (5) we see \(p(t)=\frac{3}{t}>0\) and \(q(t)=\frac{1}{t^{2}}>0\) are continuous functions on \(t>0\)).
Case 1 From FMBVP (55)–(56), we get
By solving (57), we obtain
where \(\alpha \in [0,1]\). Clearly, x and \(D_{H}^{g}x\) are \((FH^{g1})\)-differentiable. Hence, there is a (\(FH^{g1}-FH^{g1}\))-solution in this case. This solution is shown in Fig. 5 (result illustrate 2-Dimensional with \(\alpha =0.5\)) and in Fig. 6 (result illustrate 3-Dimensional). Moreover, we use MATLAB software to numerical simulation for this solution, with \(\alpha =0,\ \alpha =0.25,\ \alpha =0.5\) and \(\alpha =0.75\) (Tables 1, 2, 3).
In the Case 2, Case 3 and Case 4 by direct calculation, we have not any solution of MBVP for FSIDEs (55)–(56) .
(b) By the real Green’s function method we find solution of MBVP for FSDEs (55)–(56):
Case 1 By Theorem (5) general solution of MBVP for FSIDEs (55)–(56) under form:
where the real Green’s function G(t, s) will be defined by (14), with \(u_{1}(t)=\frac{1}{t}\) and \(u_{2}(t)=\frac{\ln (t)}{t}\) are two linearly independent solutions of homogeneous real differential equations of the form \( \bar{x}^{''}(t)+\frac{3}{t}\bar{x}^{'}(t)+\frac{1}{t^{2}}\bar{x}(t) = 0\) with homogeneous real boundary conditions and z(t) is general solution of homogeneous fuzzy-valued differential equation.
Thus, the real Green’s function G(t, s) will be defined by:
then
Applying the boundary conditions (56), we find that the solution is
We have known that, in the Case 2, Case 3 and Case 4 by direct calculation, we have not any solution of of MBVP for FSIDEs (55)–(56).
5 Conclusions
As we all know, the boundary value problems for second-order real differential equations (BVP for RSDEs) are widely applied in oscillation, in Lagrange problem of optimal control, etc\(\ldots \) But in practice almost of the processes in nature are often fuzzy. The consideration for multi-point boundary value problem for fuzzy second-order differential equations becomes urgent. Differences exist between the fuzzy multi-point boundary value problem (FMBVP) (or a multi-point boundary value problem for fuzzy second-order differential equations (MBVP for FSDEs)) and the boundary value problems for second-order real differential equations (BVP for RSDEs). In the multi-point boundary value problem for fuzzy second-order differential equations (MBVP for FSDEs), there are more stringent conditions, such as the availability of the generalized Hukuhara differentiability of solutions; summation of the boundary conditions is not eliminated, that is \(\gamma _{1}+ \gamma _{2}\) is not equal to \(\theta ^{1}\) (because the total sum of two sets in the general case and in particular of two fuzzy sets can not be zero). In this paper, we have shown the ability and how to find solutions of the MBVP for FSDEs in the form of \((FH^{gi} - FH^{gj})\)-solutions. Simultaneously, we give some examples to illustrate the results of the theory.
References
Agarwal RP, Benchohra M, O’Regan D, Ouahab A (2005) Fuzzy solutions for multipoint boundary value problems. Mem Differ Equ Math Phys 35:1–14
Bede B (2006) A note on ’Two-point boundary value problems associated with non-linear fuzzy differential equations’. Fuzzy Sets Syst 157:986–989
Bede B, Gal SG (2005) Generalizations of the differentiability of fuzzy-number-valued functions with applications to fuzzy differential equations. Fuzzy Sets Syst 151:581–599
Chalco-Cano Y, Roman-Flore H (2008) On new solutions of fuzzy differential equations. Chaos Solitons Fractals 39:112–119
Chalco-Cano Y, Rodrguez-Lpez R, Jimnez-Gamero MD (2016) Characterizations of generalized differentiable fuzzy functions. Fuzzy Sets Syst 295:37–56
Chen M, Wu C, Xue X, Liu G (2008) On fuzzy boundary value problems. Inf Sci 178:1877–1892
Gasilov NA, Amrahov SA, Fatullayev AG, Hashimoglu IF (2015) Solution method for a boundary problem with fuzzy forcing function. Inf Sci 317:340–368
Hoa NV, Phu ND (2014) Fuzzy functional integro-differential equations under generalized H-differentiability. J Intell Fuzzy Syst 26:2073–2085
Kaleva O (1987) Fuzzy differential equations. Fuzzy Sets Syst 24:301–317
Khastan A, Nieto JJ (2010) A boundary value problem for second order fuzzy differential equations. Nonlinear Anal 72:3583–3593
Khastan A, Bahrami F, Ivaz K (2009) New results on multiple solutions for Nth-order fuzzy differential equations under generalized differentiability. Bound Value Probl 2009, Article ID 395714, p 13
Khastan A, Nieto JJ, Rodrguez-Lpez R (2013) Periodic boundary value problems for first-order linear differential equations with uncertainty under generalized differentiability. Inf Sci 222:544–558
Lakshmikantham V, Murty KN, Turner J (2001) Two-point boundary problems associated with non-linear fuzzy differential equations. Math. Inequal Appl 4:527–533
O’Regan D, Lakshmikantham V, Nieto JJ (2002) Initial and boundary problems for fuzzy differential equations. Nonlinear Anal 54:405–415
O’Regan D, Lakshmikantham V, Nieto J (2003) Initial and boundary value problems for fuzzy differential equations. Nonlinear Anal 54:405–415
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Human and animal rights
This study does not contain any studies with human participants or animals performed by any of the authors.
Additional information
Communicated by V. Loia.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Phu, N.D., Hung, N.N. Some solving methods for a fuzzy multi-point boundary value problem. Soft Comput 24, 483–499 (2020). https://doi.org/10.1007/s00500-019-03926-3
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00500-019-03926-3