
Abstract
This paper proposes a new output-only element-level system identification and input estimation technique, towards the simultaneous identification of modal parameters, input excitation time history and structural features at the element-level by adopting earthquake-induced structural response signals. The method, named Full Dynamic Compound Inverse Method (FDCIM), releases strong assumptions of earlier element-level techniques, by working with a two-stage iterative algorithm. Jointly, a Statistical Average technique, a modification process and a parameter projection strategy are adopted at each stage to achieve stronger convergence for the identified estimates. The proposed method works in a deterministic way and is completely developed in State-Space form. Further, it does not require continuous- to discrete-time transformations and does not depend on initialization conditions. Synthetic earthquake-induced response signals from different shear-type buildings are generated to validate the implemented procedure, also with noise-corrupted cases. The achieved results provide a necessary condition to demonstrate the effectiveness of the proposed identification method.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The identification of structural dynamics properties appears fundamental in several engineering branches, and concerning specific technical-scientific contexts and practical applications within them. The field of earthquake engineering is considered here as a main target of interest, in particular as connected to potential Structural Health Monitoring approaches. These are devoted to the assessment of current structural properties and to the evaluation of potential damages that may occur in civil structures, due to the action of strong ground motion excitations.
In the past decades, the identification of structural dynamics properties at seismic input has been the subject of several researches, either within Experimental Modal Analysis (EMA) (e.g. [2, 3, 7, 16, 18, 23]) where the excitation input is known and/or controlled, or within Operational Modal Analysis (OMA) (e.g. [17, 20, 31, 35, 44, 45]), where the input action is unknown (output-only techniques). In these works, specifically-developed strategies have been developed to identify the modal parameters from earthquake-induced structural response signals.
In the branch of OMA methods, most common algorithms rely on the assumption of stationary white noise input. Then, the use of strong ground motion excitations has been attempted by a limited number of works, either in the Time Domain (e.g. [17, 31, 44, 46, 48]) or in the Frequency Domain (e.g. [25, 34, 35, 49]).
Concerning output-only techniques in the Frequency Domain, a refined Frequency Domain Decomposition (rFDD) approach, Pioldi et al. [39, 40], has been recently developed for the estimation of strong ground motion modal parameters, also at concomitant heavy damping, by addressing typical shortcomings of classical FDD [6] in this framework [49]. In both works, Pioldi et al. [39, 40], synthetic response signals have been adopted as a necessary validation condition. Then, in Pioldi et al. [41], systematic trials with real earthquake response signals have been effectively performed, by addressing also damage scenarios, retrofit stages and Soil Structure Interaction (SSI) effects. SSI effects have been also investigated in Pioldi et al. [43]. Finally, the rFDD technique has been improved by a coupled Chebyshev Type II filters procedure and a time-frequency Wavelets analysis, as outlined in Pioldi and Rizzi [42]. In such a research context, the present work makes a step forward, towards the development of an innovative parametric OMA algorithm in the Time Domain, devoted to assess not only the modal properties but also the earthquake input excitation and the unknown structural parameters of mass, damping and stiffness, as discussed below.
Indeed, even though modal parameters shall be considered as representative of the global dynamic properties of a given structure, referring to its mass, damping and stiffness characteristics, their usefulness may be insufficient in practical cases, in order to quantify the amount of damage that may have occurred within individual structural elements [19]. In fact, structural degradations will be reflected in modifications of the global structural behaviour. As a consequence, these damages are dependent on changes that may be detected in individual structural elements, i.e. at the so-called “element-level”, specifically in terms of time variations of stiffness and damping structural characteristics (assuming time-invariant systems in terms of mass). Also, nearly all of the available techniques for modal dynamic identification and damage detection at seismic input pertain to EMA methods, i.e. they need the knowledge (or the acquisition) of the input ground motion (i.e. the knowledge of the external action) too.
At this stage, current OMA (output-only) methods may be viewed on different levels of sophistication. The first level appears to be the lower one: it leads to the estimation of structural modal properties only, i.e. of natural frequencies, mode shapes and modal damping ratios (and, in case of parametric algorithms, also of “realizations”, in terms of a set of State-Space structural matrices referred to a given input-output behaviour [15]). The second level of detail pertains to the estimation of the “input excitation” acting on the system, specifically here of the shaking ground motion, which induces the structural response recorded from the available instrumentation. The third level of focus, finally, refers to the further refinement of mass, damping and stiffness matrix estimation. The aim is to target each of their characteristic parameters, i.e. to achieve the so-called “identification at the element-level”. Thus, the simultaneous identification of modal parameters, excitation input and structural features at the element-level still appears to be rather challenging in the present dedicated OMA literature [12, 30, 51], and specifically in the earthquake engineering context, which constitutes a main target of the present work.
By using output-only acquisitions of the structural response, during the past years several identification techniques have been proposed to jointly estimate the structural parameters and the unknown seismic input at the base. On that, a literature overview on fundamental contributions is reported below, as an underlying framework for the innovative steps and approaches put forward later in the body of the present paper.
In 1989, Toki et al. [47], proposed that the “coda” of the response time history (i.e. the tail, namely the last seconds of the acquisition following the end of the earthquake excitation) may be representative of the free vibration response of the structural system. Their assumption was that the coda is not affected by the input ground motion, and then the ratio between mass and stiffness or damping coefficients shall be constant from this part of the record on. So, modal parameters may be identified by Extended Kalman Filtering (EKF), see Hoshiya and Sutoh [21]. Also, they improved the method to estimate the input ground motion by the Kalman Filter estimation error [36].
In 1994, Benedetti and Gentile [5], suggested a Frequency Domain algorithm, which worked in two stages, to identify the properties of structures subjected to input ground motion. With this method, the responses at two different locations of the structure were assumed to be available, while the requirements for the input excitation were avoided, by using the ratio between the Fourier amplitude transforms of the two acquired response signals. However, the input time history could not be determined by that identification procedure.
In the same year (1994) Wang and Haldar [51], proposed an iterative Finite Element-based procedure in the Time Domain to evaluate both stiffness and damping matrices at the element-level, jointly with the input force excitation (which could be a generic force or seismic loading). Only a small number of observation time points was required for the development of the algorithm, where the solicitations were assumed to be initially zero for the starting of the iterative Least-Squares (LS) procedure, and then were updated step-by-step, until convergence was reached. Finally, the complete input time history could be evaluated by using the estimated stiffness and damping parameters and the full-length measured structural responses.
In 1995, Hoshiya and Sutoh [22], suggested a method to identify both the input and the stiffness and damping matrix coefficients for shear-type frames. A combination of a smoothing algorithm on the input ground excitation and of an Extended Kalman Filtering was formulated, by adopting the coda of the system responses. They used a Weighted Global Iteration (WGI) procedure to obtain fast convergence to the optimum solution and to achieve stability, as previously outlined by Hoshiya and Sutoh [21]. A problem related to these methods concerned how to choose the coda of the response time history, i.e. the exact start of the free response part of the acquisition, without a prior knowledge of the input ground motion excitation.
Afterwards, in 1997, Haldar et al. [19], expanded their previous work to cases with limited response measurements (or limited observations), i.e. when the structure was monitored only at few dynamic degrees of freedom. They combined their former iterative LS algorithm with a Weighted Global Iteration procedure applied to an Extended Kalman Filter technique.
In 2000, Li and Chen [29], proposed an iterative Time Domain method for solving hybrid inverse problems. Structural parameters and inverse time history of input excitation were simultaneously estimated, by relying on structural response signals only. In that work, additional conditions were set on the input force, by relying on its mechanical characteristics. Then, a Statistical Average (SA) algorithm was developed in terms of a properly-defined transfer coefficient. The computational steps of the algorithm relied on their previous work, Li and Chen [28].
In the same year (2000), Cho and Paik [10], refined the algorithm by Wang and Haldar [51], by proposing an improved LS method based on Multiple models QR Decomposition (MQRD). This method enhanced the LS convergence and allowed for a more accurate identification of structural elements and potential damages.
In 2002, Chen et al. [8], took the element-level Time Domain method developed by Wang and Haldar [51] and implemented a refinement, which looked to identify both the earthquake excitation and the structural parameters (at the element-level) by using a combination of an iterative LS technique and of a specifically-developed Statistical Average method. They named the algorithm as Dynamic Compound Inverse Method (DCIM), label which has been kept here as a base for the subsequent developments put forward in the present work.
Along the same line, in 2003, Li and Chen [30], published in the Computational Mechanics journal an improved version of their previous work Li and Chen [29], by improving the Statistical Average algorithm for the solution of the DCIM. The adopted solicitations spread from ambient to seismic ground motion, acting on different structures. In 2004, Chen and Li [9], again in Computational Mechanics, proposed a further implementation, which took into account the use of Rayleigh proportional damping \(\mathbf {C}=\alpha \mathbf {M}+\beta \mathbf {K}\), instead of general viscous damping used until then. The unknown damping coefficients \(\alpha \) and \(\beta \) and the stiffness parameters of matrix \(\mathbf {K}\) were coupled to each other, leading the classical MDOF equations of motion to constitute a set of non-linear identification equations in terms of the unknown structural parameters. Then, by relying on their previous algorithm, they developed a two-stage iterative method to avoid the non-linear identification problem. An inner modification process was applied between each iterative step, to convert the spatial information of the external excitation into mathematical conditions for the iterative algorithm. In that work, the focus was on possible forced vibration surveys of the system, i.e. on cases where the structure was excited by actuators installed at several locations of the building. No ground motions or ambient vibrations were considered at that stage. The present paper relies much on the two contributions above, and attempts to provide a more general and robust analysis, as it is going to be outlined below, towards achieving a full identification approach (Full Dynamic Compound Inverse Method-FDCIM).
Still in 2004, Ling and Haldar [32], developed a further approach to take into account the possible use of Rayleigh proportionally-damped systems. They proposed a modified Iterative LS method with Unknown Input (ILS-UI) to identify such types of systems at the element-level. They used Taylor series approximations to transform the non-linear set of identification equations (arising from the equations of motion with Rayleigh damping) into a set of linear equations. Again, no ground motions or ambient vibrations were considered.
In 2006, Zhao et al. [54], demonstrated that the structural parameters and the earthquake ground motion could not be uniquely identified when absolute structural response signals were used, instead of relative ones. Then, they proposed a hybrid identification method to tackle the problem. First, that algorithm identified the structural parameters above the first-floor of a multi-storey shear-type building, by using LS. Later, the minimum modal information was introduced to find out the first floor parameters and to avoid the shortcoming of non-uniqueness. After that, all structural parameters were identified. The unknown earthquake ground motion was estimated by solving a first-order differential equation.
In 2008, Perry and Koh [38], proposed an element-level parameter and input estimation with a non-classical approach based on a Genetic Algorithm (GA). They made use of a modified GA-based method, to adopt the strategy of the Search Space Reduction Method, Perry et al. [37]. This method was revised by Perry and Koh [38] through a modification of the numerical integration scheme, and was allowed to be used also for output-only identification. Still in 2008, Wang and Cui [52], suggested a two-step method, which generalized the work of Chen et al. [8], apt to identify both element-level structural parameters and input time history.
Concerning the intelligent monitoring of multi-storey buildings by a wireless sensor network, in 2012, Lei et al. [27], suggested an element-level and input ground motion identification algorithm based on a two-stage Kalman Filter estimator. That method worked with absolute coordinates through the use of sub-structuring methods. Still in 2012, Lourens et al. [33], proposed an extension of an existing joint input-state estimation Kalman Filter, which was derived by using a linear minimum-variance unbiased estimation. The novelty consisted in the use of an optimal estimate in place of the true value of the input for the Kalman Filter steps.
Then, in 2014, Ding et al. [14], developed a method which could be used to identify structural parameters and input time history, either for linear or non-linear hysteretic frames with limited observations. With this method, they decomposed the structural excitation by orthogonal approximation and then applied an Extended Kalman Filter for the identification. Only forces acting on the floors of the frames were considered at that stage.
Recently, Bayesian methods also started to be applied for OMA input and element-level identification. Relevant examples may be found in Behmanesh et al. [4], where a probabilistic Finite Element (FE) model updating technique based on Hierarchical Bayesian modelling was proposed for the identification of civil structural systems under changing ambient/environmental conditions. Further, the works of Au and Zhang [1] and Zhang and Au [53], suggested the adoption of a modified two-stage Bayesian identification approach, towards the estimation of modal properties and structural parameters.
Still in 2015, Concha et al. [12], suggested an adaptive observer which simultaneously estimated the damping/mass and the stiffness/mass ratios, as well as the state of seismically-excited shear buildings. Their work started from the research of Jiménez and Icaza [24], where the parametrization of a shear-type frame equipped with a Magneto-Rheological Damper (MRD) had been considered; the assumptions were the knowledge of the structural parameters (at a first approximation, accounting for some uncertainties) and of the seismic ground acceleration, the accelerations of each floor and the MRD damper force (direct measurement). Similar assumptions were assumed in Concha et al. [12], where the identification scheme relied on the knowledge (i.e. on the measurement) of ground and floor accelerations and of the first floor mass \(m_1\). This method achieved the estimation of a reduced-order model, if some floors only may be equipped with available instrumentation. Computationally, the algorithm relied on LS and on a Luenberger state estimator for the estimation process.
A crucial common denominator between all the aforementioned works is the fact that they take the full mass matrix to be given for granted, both in its matrix structure and in its mass parameters. Then, despite the output-only feature of the algorithms, the knowledge of structural responses only (either in terms of accelerations, velocities or displacements) is not sufficient for their functioning. A slight exception comes from the work of Concha et al. [12], where the first floor mass \(m_1\) and the seismic ground acceleration has been considered to be known, to return the element-level identifications for all the stiffness, damping and mass matrices.
In this framework, the present paper proposes a new, complete element-level system identification and input estimation algorithm, hereafter named Full Dynamic Compound Inverse Method (FDCIM), following the terminology introduced in Computational Mechanics by Chen et al. [8]. This is specifically developed to operate with earthquake-induced response signals, collected from seismically-excited MDOF shear-type frames. The method releases strong assumptions implied by earlier techniques, especially the required knowledge of the full mass matrix (or at least of its specific elements), to provide an effective identification of the modal parameters of the system, i.e. natural frequencies, mode shapes and modal damping ratios, of the excitation input and of a realization of the state matrices. In fact, the present FDCIM algorithm requires the knowledge of structural response signals only, while mass, damping (handled here as general viscous damping; thus, an independent feature to be identified) and stiffness matrices, and obviously the exciting earthquake input, may be completely unknown. Accurate estimations of the input ground motion time history and of the states at the element-level are provided through a two-stage iterative algorithm. This method works jointly with a Statistical Average technique, a modification process and a parameter projection strategy, which are adopted at each iteration to provide correct and stronger constraints for the estimates, allowing for faster and much reliable convergence.

Lumped mass structural model of the adopted shear-type frame subjected to ground motion base excitation \(\ddot{\mathbf {u}}_g\)
Moreover, the proposed FDCIM method (as opposed to other methods operating in the stochastic framework) appears to be completely deterministic and it is fully developed in State-Space form. It does not require transformations from continuous-time to discrete-time and it does not depend on the adopted initial conditions or on the state estimation, in order to identify the modal parameters and the input ground motion. Further, all structural features as element-level mass, damping and stiffness matrices, may be accurately identified merely by knowing any single component of one of these matrices, or even by relying on an estimate of a global structural parameter, like for instance the total mass of the building. Then, the adopted formulation is suitable for integration or support to other common output-only methods working with State-Space parametric Time Domain frameworks.
Presentation of the paper is structured as follows. Subsequent Sect. 2 presents the mathematical model, the basic governing equations and the derivation and theoretical framework of the present Full Dynamic Compound Inverse Method. The case of general viscous damping is detailed as well, in all its formulations. Section 3 presents a first validation of the developed algorithm with simulated data from a 3-storey frame, by describing results for the estimated modal parameters and input ground motion excitation and for the accurate element-level identification, as a function of the adopted number of record points. Section 4 outlines comprehensive results on the application of the FDCIM approach to noise-corrupted earthquake-induced synthetic response signals, coming from the same examples adopted in Sect. 3. Various levels of added noise have been considered, by aiming at getting closer to real conditions, i.e. resembling those that may be encountered in practice for real seismic response recordings. Then, further demonstrative analyses on a challenging 10-storey realistic structure from the literature are additionally produced and reported in Sect. 5, where results are considered again as a function of the adopted number of record points and by taking into account noise-corrupted signals. In the end, main conclusions are gathered in Sect. 6.
2 Full Dynamic Compound Inverse Method
2.1 Basic mathematical model
The response of a linear MDOF shear-type building subjected to earthquake base excitation, characterized by ground acceleration \(\ddot{{u}}_g(t)\), is governed by the following classical set of second-order time-differential equations:
where \(\mathbf {M}\), \(\mathbf {C}\) and \(\mathbf {K} \in \mathcal {R}^{n \times n}\) are the mass, damping and stiffness matrices of the structural system, respectively, with the following classical definitions:
where n is the number of floors, \(m_i\) are the floor masses, \(c_i\) and \(k_i\) (\(i=1,\ldots ,n\)) are the lateral column damping and stiffness coefficients, respectively, between the ith and the \((i-1)\)th floor. Matrix \(\mathbf {M}\) is diagonal and matrices \(\mathbf {C}\), \(\mathbf {K}\) share a tridiagonal (symmetric) structure. Vector \(\mathbf {u}=[u_1\,\,u_2\,\,u_3\ldots ,u_n]^{\mathrm {T}} \in \mathcal {R}^{n \times 1}\) gathers the absolute (relative to the ground) displacements of each floor. Consistently, vectors \(\dot{\mathbf {u}}\) and \(\ddot{\mathbf {u}}\) represent absolute (relative to the ground) velocities and accelerations. Finally, the input force vector \(\mathbf {f}(t) \in \mathcal {R}^{n \times 1}\) is the vector containing the acting excitation input, here coming from the ground acceleration. It is defined as \(\mathbf {f}(t)=-\mathbf {M}\ddot{\mathbf {u}}_g = -\mathbf {M}\mathbf {r} \ddot{u}_g\), where \(\mathbf {r} = [1\,\,1\,\,1\dots \,1]^{\mathrm {T}} \in \mathcal {R}^{n \times 1}\) is the influence coefficient (rigid body motion) vector for the analysed case and \(\ddot{\mathbf {u}}_g = \mathbf {r} \ddot{u}_g\) is the ground acceleration vector. Figure 1 sketches the initial geometry, the lumped-mass scheme and the displacements of the adopted shear-type model, where \(h_i\) represent the relative floor heights.
By switching to State-Space form, the n second-order differential equations of motion in Eq. (1) can be rewritten into 2n first-order differential equations, in terms of state equation \(\dot{\mathbf {x}}(t)\) and observer equation \(\mathbf {y}(t)\), by sticking to classical literature definitions (see e.g. [15]):
where \({\mathbf {x}}(t) = [{\mathbf {u}}(t)\,\,\dot{\mathbf {u}}(t)]^{\mathrm {T}} \in \mathcal {R}^{2n \times 1}\) is the state vector and \(\dot{\mathbf {x}}(t)\) is its derivative, while \({\mathbf {y}}(t) \in \mathcal {R}^{n \times 1}\) is the output vector. Moreover, \(\mathbf {A} \in \mathcal {R}^{2n \times 2n}\) is the state matrix, \(\mathbf {B} \in \mathcal {R}^{2n \times n}\) the input matrix, \(\mathbf {C}_o \in \mathcal {R}^{n \times 2n}\) the output matrix and \(\mathbf {D} \in \mathcal {R}^{n \times n}\) the feed-through matrix, which can be defined as follows:

Matrix terms \(\mathbf {0}_{n \times n}\) and \(\mathbf {I}_{n \times n} \in \mathcal {R}^{n \times n}\) indicate zero and identity matrices of the specified dimensions, respectively.
In the present identification implementation, the known quantities are only the dynamic responses, i.e. \({\mathbf {x}}(t)\) and \(\dot{\mathbf {x}}(t)\) state vectors, while state matrices (i.e. \(\mathbf {A}\), \(\mathbf {B}\), \(\mathbf {C}_o\) and \(\mathbf {D}\) matrices) and input vector \(\mathbf {f}(t)\) are the unknown variables to be identified. Accordingly, by switching back to physical space, the parameters which will be estimated are the modal characteristics, the seismic ground acceleration \(\ddot{u}_g\) and the mass, damping and stiffness matrices (i.e. their coefficients).
Thus, while typically Eqs. (1) or (3) are conceived to be formed and solved for the unknown structural responses, in the present identification process the role of given information and unknown variables is reversed and effective algebraic rewriting of the equations of motion, leading to appropriate identification equations, is sought, in view of expressing the new role of the unknown variables (the identification variables). This is pursued next.
It can be noticed that the estimation problem, by taking into account the desired unknowns, turns out to be undetermined, in the sense that is going to be revealed in the following. In order to handle this issue, from Eq. (1) it is possible to write the two following concatenated relations, namely the two basic equations on which the present recursive algorithm is built:
where Eq. (6) may be derived directly from Eq. (5), by \(\mathbf {M}^{-1}\) pre-multiplication. Notice that mass matrix \(\mathbf {M}\) can always be inverted, since it is taken as a diagonal, non-singular matrix. The switching of Eqs. (5) and (6) to State-Space representation is immediate, and leads to the following formulations:
where \(\mathbf {G}_{ck} \in \mathcal {R}^{2n \times 2n}\), \(\mathbf {N}_{ck} \in \mathcal {R}^{2n \times 2n}\), \(\mathbf {L}_{ck} \in \mathcal {R}^{2n \times n}\), \(\mathbf {G}_{m} \in \mathcal {R}^{2n \times 2n}\) and \(\mathbf {L}_{m} \in \mathcal {R}^{2n \times n}\) are matrices to be specifically assembled, defined as follows:
Then, Eq. (7) can be rewritten, with the purpose of a first-stage identification (described in subsequent Sect. 2.2), in the following form (see [30]):
Last Eq. (10) is defined for every time instant \(t=t_i\), \(i=1,\ldots ,L\), being L the total number of points of the acquired input signals, i.e. the length of the signal. By collecting together all the sampling time instants, the subsequent formulation can be reached:
where:
Then, \(\mathbf {H}_{ck}(t)\) is a matrix containing the (known) velocity and displacement responses, \(\varvec{\theta }_{ck}\) is a vector containing all the (unknown, to be identified) damping and stiffness parameters and \(\mathbf {P}_{ck}(t)\) is a vector related to the (unknown) mass terms, containing both (known) acceleration responses and (unknown) input ground motion excitation. Their elements can be computed, at the generic time instant \(t_i\), as:
Finally, the \(\varvec{\theta }_{ck}\) parameters may be estimated by applying a LS technique to previous Eq. (11):
where superscript symbol \(\dagger \) indicates the Moore-Penrose pseudo-inverse.
Similarly, for a second identification stage (see Sect. 2.2), Eq. (8) can be rewritten, for every time instant \(t=t_i\), \(i=1,\ldots ,L\), as:
By collecting all the sampling time instants together one has:
where:
So, \(\mathbf {H}_{m}(t)\) is again a matrix containing the (known) velocity and displacement responses, \(\varvec{\theta }_{m}\) is a vector containing all the inverse of the (unknown, to be identified) mass parameters and \(\mathbf {P}_{m}(t)\) is a vector collecting the (known) acceleration responses and the (unknown) input ground motion excitation. By considering a generic time instant \(t_i\), each of their elements can be calculated as:
As seen in Eq. (15), the mass parameters collected in \(\varvec{\theta }_{m}\) can be estimated by applying a LS technique to Eq. (17):
Notice that, as commented earlier right after Eq. (4), the achieved algebraic representations in Eqs. (11) and (17) invert the role of unknown parameters and given quantities, as in Eqs. (1) and (3), so as to allow solving for the identification process in the unknown quantities to be identified, for a total number of 3n unknown structural parameters and unknown input ground motion signal.
By summarizing the introduced problem and its formulation so far, it can be noted that it does not look one of a simple solution, since unknown quantities are collected inside \(\mathbf {P}_{ck}\) and \(\mathbf {H}_{m}\). Then, a two-stage iterative solution provided by the present Full Dynamic Compound Inverse Method (FDCIM) is innovatively developed below, to deal with the present identification inverse problem, as it is presented in the next section.
2.2 Two-stage identification algorithm
The developed Full Dynamic Compound Inverse Method (FDCIM) is an algorithm that, by working with a State-Space representation, allows for the estimation, in series, of modal parameters, input ground motion and structural characteristics at the element-level. This is possible through a two-stage iterative algorithm, which consists of a LS optimization technique for parameter identification, Lawson and Hanson [26], and of a Statistical Average (SA) method, Chen et al. [8], which make the estimated input excitation to comply with the dynamic equilibrium of the considered frame, at each time instant, and rely on a modification process, allowing for faster convergence.
The only known quantities are the time histories acquired from the building responses; especially, only acceleration responses may be known, since velocities and displacements may be integrated numerically from accelerations, see [12]. Then, the development of the FDCIM algorithm, divided in two subsequent stages, may be summarized in the computational steps outlined below.
-
First stage (realization of stiffness and damping parameters):
-
1.1
For the first iteration, since both \(\varvec{\theta }_{ck}\), \(\varvec{\theta }_{m}\) and \(\ddot{u}_g\) are unknown quantities, each parameter vector must be assigned to an arbitrary initial value, for example \({^{0}{\varvec{\theta }_{ck}}}= \lbrace 1\,\,1\,\,1\,\,\dots \,\,1 \rbrace ^{\mathrm {T}}\), \({^{0}{\varvec{\theta }_{m}}} = \lbrace 1\,\,1\,\,1\,\,\dots \,\,1 \rbrace ^{\mathrm {T}}\), where left apex symbol 0 stays for initial starting value. For the subsequent recursions, a similar left apex i denotes the current iteration. Notice that the performance of the method is not sensitive to these initial values, which may be whatever between, say, \(10^{-6}\) and \(10^{6}\). Then, initial matrices \({^{0}{\mathbf {M}}}\), \({^{0}{\mathbf {C}}}\), \({^{0}{\mathbf {K}}}\) (through Eqs. (2)) and \({^{0}{\mathbf {H}_{ck}}}\) (through Eq. (12a)) can be computed.
-
1.2
An estimate of vector \(\mathbf {P}_{ck}\) can be calculated by using the terms of Step 1, from Eq. (11), getting \({^{0}{\tilde{\mathbf {P}}_{ck}}} = {^{0}{\mathbf {H}_{ck}}} {^{0}{\varvec{\theta }_{ck}}}\). Overmarking symbol \(\sim \) stays here for estimated value.
-
1.3
By using \(^{0}{\tilde{\mathbf {P}}_{ck}}\), matrix \(\mathbf {G}_{ck}\) can be estimated from the following LS expression:
$$\begin{aligned} ^{0}{\tilde{\mathbf {G}}_{ck}} = {^{0}{\tilde{\mathbf {P}}_{ck}}} {\mathbf {X}}^{\dagger } = {^{0}{\tilde{\mathbf {P}}_{ck}}} \, \Big ( \left[ {\mathbf {X}}^{\mathrm {T}} {\mathbf {X}}\right] ^{-1} {\mathbf {X}}^{\mathrm {T}} \Big ), \end{aligned}$$(22)where \(\mathbf {X} = \lbrace \mathbf {x}(t_1) \,\,\,\, \mathbf {x}(t_2) \,\, \dots \,\, \mathbf {x}(t_L)\rbrace ^{\mathrm {T}} \in \mathcal {R}^{(L \times 2n) \times 1}\) is the global state matrix, accounting for all L time instants.
-
1.4
Knowing \({^{0}{\varvec{\theta }_{m}}}\), \({^{0}{\tilde{\mathbf {N}}_{ck}}}\) can be reconstructed from Eq. (9a).
-
1.5
Starting from Eq. (7), an estimate of the input ground motion vector \({^{0}{\ddot{\mathbf {u}}_{g,k}(t)}}\) can be obtained:
$$\begin{aligned} {^{0}{\tilde{\ddot{\mathbf {u}}}_{g,k}(t)}} = -\Big ( \mathbf {L}_{ck} {^{0}{\mathbf {M}}} \Big )^{\dagger } \Big ( {{^{0}{\tilde{\mathbf {G}}_{ck}}} \mathbf {x}(t) - {^{0}{\tilde{\mathbf {N}}_{ck}}} \dot{\mathbf {x}}(t)} \Big ), \end{aligned}$$(23)where \({^{0}{\tilde{\ddot{\mathbf {u}}}_{g,k}(t)}} = \lbrace {^{0}{\tilde{\ddot{u}}^{(1)}_{g,k}(t)}} \,\,\,\, {^{0}{\tilde{\ddot{u}}^{(2)}_{g,k}(t)}} \,\,\,\, {^{0}{\tilde{\ddot{u}}^{(3)}_{g,k}(t)}} \,\, \dots {^{0}{\tilde{\ddot{u}}^{(i)}_{g,k}(t)}} \,\, \dots \,\, {^{0}{\tilde{\ddot{u}}^{(n)}_{g,k}(t)}} \rbrace ^{\mathrm {T}}\) contains the estimate of the input ground motion relative to each storey \(i=1,\dots ,n\) and for every time instant \(t=t_j\), \(j=1,\dots ,L\).
-
1.6
Then, a Statistical Average (SA) process is introduced in the algorithm, since the nth ground accelerations \({^{0}{\tilde{\ddot{u}}^{(i)}_{g,k}(t)}}\) obtained from previous Eq. (23) should be the same for every storey, at each time instant \(t=t_j\). Actually, this is not true because of the difference between the assumed initial values \({^{0}{\varvec{\theta }_{ck}}}\), \({^{0}{\varvec{\theta }_{m}}}\) and their true values. So, the SA method can be applied as follows, by computing the average (mean value) \({^{0}{\bar{\ddot{u}}_{g,k}(t_j)}}\) between the n different \({^{0}{\tilde{\ddot{u}}^{(i)}_{g,k}(t_j)}}\), at each time instant \(t=t_j\):
$$\begin{aligned} ^{0}{\bar{\ddot{u}}_{g,k}(t_j)} = \frac{1}{n} \sum ^{n}_{i=1} {^{0}{\tilde{\ddot{u}}^{(i)}_{g,k}(t_j)}}, \,\,\,\,\,\, j=1,\dots ,L \end{aligned}$$(24) -
1.7
After the computation of the average ground motion \({^{0}{\bar{\ddot{u}}_{g,k}(t)}}\), a modified version of vector \(\mathbf {P}_{ck}(t)\) may be reconstructed, by using the following modification procedure:
$$\begin{aligned} {^{0}{\hat{\mathbf {P}}_{ck}(t)}} = {^{0}{\tilde{\mathbf {N}}_{ck}}} \dot{\mathbf {x}}(t) - \mathbf {L}_{ck}\, {^{0}{\mathbf {M}}} \mathbf {r}\, {^{0}{\bar{\ddot{u}}_{g,k}(t)}} \end{aligned}$$(25)where superscript \(\wedge \) means modified value.
-
1.8
Finally, an improved estimation of the \(\varvec{\theta }_{ck}\) parameters can be computed by the use of the modified \(^{0}{\hat{\mathbf {P}}_{ck}}\) vector, leading to estimates of damping and stiffness parameters at iteration 1 as follows:
$$\begin{aligned} {^{1}{\varvec{\theta }_{ck}}} = {^{0}{\mathbf {H}^{\dagger }_{ck}}}\, {^{0}{\tilde{\mathbf {P}}_{ck}}} = \Big ( \left[ {^{0}{\mathbf {H}^{\mathrm {T}}_{ck}}} \, {^{0}{\mathbf {H}_{ck}}} \right] ^{-1}\, {^{0}{\mathbf {H}^{\mathrm {T}}_{ck}}} \Big ) \, {^{0}{\tilde{\mathbf {P}}_{ck}}} \end{aligned}$$(26) -
1.9
On the latter LS formulation, a parameter projection technique is adopted, in order to arrive at strictly-positive estimates of \(\big ({^{1}{\varvec{\theta }_{ck}}}\big )_{ij}\) parameters, i.e. of \(c_{i}\) and \(k_{i}\) terms, when \(i=j\) (i.e. for the diagonal terms of the damping and stiffness matrices), without the need of solving constrained LS problems:
$$\begin{aligned} \big ({^{1}{\varvec{\theta }_{ck}}}\big )_{ij} = \mathrm {sgn}\Big [\big ({^{1}{\varvec{\theta }_{ck}}}\big )_{ij}\Big ]\big ({^{1}{\varvec{\theta }_{ck}}}\big )_{ij}, \,\,\,\,\,\, \forall i,j = 1,\dots ,n \end{aligned}$$(27)where \(\mathrm {sgn}[\dots ]\) represents the sign function, that is the odd mathematical function which extracts the sign of the real number in its argument.
Then, from the estimate of \({^{1}{\varvec{\theta }_{ck}}}\), updated estimates \({^{1}{\mathbf {C}}}\) and \({^{1}{\mathbf {K}}}\) of the damping and stiffness matrices can be computed.
-
1.1
-
Second stage (realization of mass parameters):
Similarly to what seen for the first stage, the second stage will be outlined by the following computational steps.
-
2.1
The first iteration of the second identification stage starts from the achieved estimates of \({^{1}{\varvec{\theta }_{ck}}}\), \({^{1}{\mathbf {C}}}\) and \({^{1}{\mathbf {K}}}\), aiming at the computation of the \({^{0}{\mathbf {H}_{m}}}\) matrix, through Eq. (18a).
-
2.2
Vector \(\mathbf {P}_{m}\) can be estimated by using the terms of Step 2.1, from Eq. (17) to \({^{0}{\tilde{\mathbf {P}}_{m}}} = {^{0}{\mathbf {H}_{m}}} {^{0}{\varvec{\theta }_{m}}}\), where \({^{0}{\varvec{\theta }_{m}}}\) was defined in previous Step 1.1.
-
2.3
Matrix \(\mathbf {G}_{m}\) can be estimated, through the estimated value of \({^{0}{\tilde{\mathbf {P}}_{m}}}\), from the LS problem:
$$\begin{aligned} {^{0}{\tilde{\mathbf {G}}_{m}}} = {^{0}{\tilde{\mathbf {P}}_{m}}} {\mathbf {x}}^{\dagger } = {^{0}{\tilde{\mathbf {P}}_{m}}} \Big ( \left[ {\mathbf {x}}^{\mathrm {T}} {\mathbf {x}}\right] ^{-1} {\mathbf {x}}^{\mathrm {T}} \Big ) \end{aligned}$$(28)Notice that from matrix \(\mathbf {G}_{m}\), an estimate of state matrix \(\mathbf {A}\) can be directly computed, leading to \({^{0\!}{\tilde{\mathbf {A}}}}\) (see Eq. (9b) for more details).
-
2.4
Input ground motion vector \({^{0}{\ddot{\mathbf {u}}_{g,c}(t)}}\) can be again estimated, by taking into account previous Eq. (8), as:
$$\begin{aligned} {^{0}{\tilde{\ddot{\mathbf {u}}}_{g,c}(t)}} = -\mathbf {L}_{m}^{\dagger } \Big ( {^{0}{\tilde{\mathbf {G}}_{m}} \mathbf {x}(t) - \dot{\mathbf {x}}(t)} \Big ) \end{aligned}$$(29)where, again, vector \({^{0}{\tilde{\ddot{\mathbf {u}}}_{g,c}(t)}}\) holds the input ground motion estimates for each storey \(i=1,\dots ,n\) and for every time instant \(t=t_j\), \(j=1,\dots ,L\).
-
2.5
As in previous Step 1.6, the Statistical Average method is applied, at each time instant \(t=t_j\), to the n different \({^{0}{\tilde{\ddot{u}}^{(i)}_{g,c}(t_j)}}\) ground motion accelerations:
$$\begin{aligned} {^{0}{\bar{\ddot{u}}_{g,c}(t_j)}} = \frac{1}{n} \sum ^{n}_{i=1} {^{0}{\tilde{\ddot{u}}^{(i)}_{g,c}(t_j)}}, \,\,\,\,\,\, j=1,\dots ,L \end{aligned}$$(30) -
2.6
Through the following modification procedure, the modified version of vector \(\mathbf {P}_{m}(t)\) can be reconstructed as:
$$\begin{aligned} {^{0}{\hat{\mathbf {P}}_{m}(t)}} = -\dot{\mathbf {x}}(t) - \mathbf {L}_{ck} \mathbf {r} \, {^{0}{\bar{\ddot{u}}_{g,c}(t)}} \end{aligned}$$(31) -
2.7
Then, through the use of modified vector \({^{0}{\hat{\mathbf {P}}_{m}}}\), the improved estimation of \(\varvec{\theta }_{m}\) can be computed, by giving rise to iteration 1 for the second identification stage:
$$\begin{aligned} {^{1}{\varvec{\theta }_{m}}} = {^{0}{\mathbf {H}^{\dagger }_{m}}} \, {^{0}{\tilde{\mathbf {P}}_{m}}} = \Big ( \left[ {^{0}{\mathbf {H}^{\mathrm {T}}_{m}}} \, {^{0}{\mathbf {H}_{m}}} \right] ^{-1}\, {^{0}{\mathbf {H}^{\mathrm {T}}_{m}}} \Big ) \mathbf {P}_{m} \end{aligned}$$(32) -
2.8
As before, on previous Eq. (32) the parameter projection technique is implemented, towards getting strictly-positive estimations of the \(\big ({^{1}{\varvec{\theta }_{m}}}\big )_{ij}\) parameters \(\forall i,j = 1,\dots ,n\) (since mass matrix elements must be all strictly-positive), without the use of constrained LS problems:
$$\begin{aligned} \big ({^{1}{\varvec{\theta }_{m}}}\big )_{ij} = \mathrm {sgn}\Big [\big ({^{1}{\varvec{\theta }_{m}}}\big )_{ij}\Big ]\big ({^{1}{\varvec{\theta }_{m}}}\big )_{ij} \,\,\,\,\,\, \forall i,j = 1,\dots ,n \end{aligned}$$(33)Then, from the \(^{1}{\varvec{\theta }_{m}}\) estimate, the updated estimate of mass matrix \({^{1}{\mathbf {M}}}\) can be computed.
-
2.9
In the end, \({^{0}{\mathbf {M}}}\), \({^{0}{\mathbf {C}}}\), \({^{0}{\mathbf {K}}}\), \({^{0}{\varvec{\theta }_{ck}}}\) and \({^{0}{\varvec{\theta }_{m}}}\) can be replaced by updated parameters \({^{1}{\mathbf {M}}}\), \({^{1}{\mathbf {C}}}\), \({^{1}{\mathbf {K}}}\), \({^{1}{\varvec{\theta }_{ck}}}\) and \({^{1}{\varvec{\theta }_{m}}}\) in Step 1.1.
The two-stage recursive algorithm iterates then from Step 1.2 to Step 2.8, until the following convergence criteria are met:
$$\begin{aligned}&\mathrm {max} \, \bigg | \dfrac{{^{i}{\varvec{\theta }_{ck}(p)}}-{^{i-1}{\varvec{\theta }_{ck}(p)}}}{{^{i}{\varvec{\theta }_{ck}(p)}}} \bigg | < \varepsilon _{\theta }, \nonumber \\&\mathrm {max} \, \bigg | \dfrac{{^{i}{\varvec{\theta }_{m}(q)}}-{^{i-1}{\varvec{\theta }_{m}(q)}}}{{^{i}{\varvec{\theta }_{m}(q)}}} \bigg | < \varepsilon _{\theta } \end{aligned}$$(34a)$$\begin{aligned}&\mathrm {max} \, \Bigg \Vert \dfrac{{^{i}{\tilde{\ddot{u}}^{(r)}_{g,k}(t_j)}} - {^{i}{\bar{\ddot{u}}_{g,k}(t_j)}}}{{^{i}{\bar{\ddot{u}}_{g,k}(t_j)}}} \Bigg \Vert < \varepsilon _{g}, \nonumber \\&\mathrm {max} \, \Bigg \Vert \dfrac{{^{i}{\tilde{\ddot{u}}^{(r)}_{g,c}(t_j)}} - {^{i}{\bar{\ddot{u}}_{g,c}(t_j)}}}{{^{i}{\bar{\ddot{u}}_{g,c}(t_j)}}} \Bigg \Vert < \varepsilon _{g} \end{aligned}$$(34b)where left superscript i indicates the current iteration step (and \(i-1\) the previous one), and p and q are the pth and qth elements of vectors \(\varvec{\theta }_{ck}\) and \(\varvec{\theta }_{m}\), respectively. Superscript r is the rth DOF of the estimated ground motion, while j indicates the jth time instant of interest. Finally, \(\varepsilon _{\theta }\) and \(\varepsilon _{g}\) represent the selected tolerances, which generally can be chosen to be between \(10^{-4}\) and \(10^{-6}\). Of course, \(\varepsilon _{\theta }\) refers to a convergence criterion on the structural parameters, while \(\varepsilon _{g}\) refers to a convergence criterion on the estimated input ground motion.
-
2.1
For the analyses presented here, convergence tolerances have been generally set to \(\varepsilon _{\theta }=10^{-6}\) and \(\varepsilon _{g}=10^{-4}\). For the ground motion, a lower convergence level is selected, since the estimation error is “diluted” over a considerable greater amount of values, with respect to that for the vector parameters. A stopping criteria is set if after 2000 iterations the convergence criteria have not reached at least \(\varepsilon _{\theta }=10^{-4}\) and \(\varepsilon _{g}=10^{-2}\). Then, the algorithm definitively stops if after 5000 iterations convergence has not been reached, or if any of the \({\theta }_{i}\) identified parameters go to zero or to infinity.
Once the iterations made on the two stages of the algorithm go to convergence, the final \(\varvec{\theta }_{ck}\) and \(\varvec{\theta }_{m}\) render realizations of the final mass, damping and stiffness matrices, jointly with realizations of state matrix \(\mathbf {A}\) and output matrix \(\mathbf {C}_0\), which can be directly derived from \(\mathbf {G}_{m}\). At a glance, a realization of the State-Space model can be reconstructed from these matrices. Then, the averaged value \(\bar{\ddot{u}}_{g,c}(t)\) obtained from Step 2.5 represents the estimated time history of the ground motion.
2.3 Element-level identification procedure
As previously explained, from the FDCIM, estimates of the modal parameters, of the input ground motion excitation and of the structural (mass, damping and stiffness) matrices at the element-level can be achieved. These matrices, as well as the identified State-Space matrices (\(\mathbf {A}\), \(\mathbf {B}\), \(\mathbf {C}_0\) and \(\mathbf {D}\)), represent a realization of the system under investigation, i.e. a possible combination of matrices which is able to reconstruct the acquired structural responses \(\mathbf {u}(t)\), \(\dot{\mathbf {u}}(t)\) and \(\ddot{\mathbf {u}}(t)\), known the input ground motion excitation \(\ddot{u}_g(t)\). The latter can be estimated from Step 2.5, as exposed earlier.
Then, from the estimated realization of state and output matrices (\(\mathbf {A}\) and \(\mathbf {C}_0\)) or, equivalently, of mass, damping and stiffness matrices, the modal properties (natural frequencies, mode shapes and modal damping ratios) can be obtained in a straight-forward manner [11, 13].
The last issue concerns the accurate identification of the element-level values, since by this iterative procedure matrices \(\mathbf {M}\), \(\mathbf {C}\) and \(\mathbf {K}\) are identified correctly, unless for a real positive multiplying parameter \(\delta \), hereafter called Fixing Factor. This means that the proper orders of magnitude between each element are preserved, and only a multiplying parameter \(\delta \) is required to restore the real amount of each mass, damping and stiffness element. In other words, different realizations of matrix \(\mathbf {M}\), \(\mathbf {C}\) and \(\mathbf {K}\) differ only for an unknown proportionality factor.
The Fixing Factor \(\delta \) can be computed through the knowledge (or at least, an evaluation) of a single structural parameter, allowing then for rescaling the realizations. For instance, the total mass of the building under exam may be known or estimated, or any other single parameter of one of three matrices \(\mathbf {M}\), \(\mathbf {C}\) and \(\mathbf {K}\) (namely any single parameter among \(m_i\), \(c_i\) and \(k_i\)). Basically, one of these comparison values P comes from its knowledge (or estimation) from the real building (\(P_{real}\)), while the other is taken from the estimated model (\(P_{est}\)). So, the Fixing Factor can be simply computed as the ratio between them:
Then, by multiplying the estimated mass, damping and stiffness matrices by the Fixing Factor, the real value of the element-level identified parameters is achieved. In Sects. 3 and 4, the element-level estimates achieved from the analysed cases will be presented, by adopting always \(P= m_{tot}\) as rescaling parameter (a parameter that may be judged in practical cases, based on several types of information that may be known for the building).
3 Identification outcomes
The effectiveness of the further developed Full Dynamic Compound Inverse Method is now presented through numerical examples, generated from synthetic earthquake-induced response signals. The adopted structure is a three-storey shear-type frame, taken from the work of Chen et al. [8], whose characteristics are reported in Table 1.
The modal characteristics of the building can be computed through classical modal analysis, as reported in Table 2.
The adopted input ground motion excitation is the El Centro 1940 earthquake, as also used by Toki et al. [47], Li and Chen [30], Perry and Koh [38], Lei et al. [27], whose main features are recalled in Table 3.
The time duration is \(40\,\mathrm {s}\), sampled at \(100\,\mathrm {Hz}\), resulting in a total number of 4000 signal points. The response of the building, in terms of absolute displacements, velocities and accelerations is computed via numerical integration of the equations of motions by Newmark’s method, see e.g. [11]. These responses are taken as the only known quantities in the identification process. Of course, if only accelerations results were known (as usual, from the acquisitions out of the monitored structure), specifically-developed integration schemes may be implemented, to obtain also velocities and displacements (e.g. like the ones presented in Concha et al. [12]).
Then, the so-obtained structural responses are taken as input, i.e. as known quantities, for the application of the present FDCIM technique. The performance of the method has been assessed with several different initial values of vectors \({^{0}{\varvec{\theta }_{ck}}}\) and \({^{0}{\varvec{\theta }_{m}}}\), between \(10^{-6}\) and \(10^{6}\). No measurable differences have been found among the attempted values, both in terms of achievable estimates (\(\Delta < 0.00001\%\)) and number of iterations (\(\Delta < 5\%\)), which turn out to be exactly the same for all the examined cases. So, the developed identification method can be considered to be insensitive on the adopted initial values, which have been finally chosen as \({^{0}{\varvec{\theta }_{ck}}}= \lbrace 1\,\,1\,\,1\,\,\dots \,\,1 \rbrace ^{\mathrm {T}}\) and \({^{0}{\varvec{\theta }_{m}}} = \lbrace 1\,\,1\,\,1\,\,\dots \,\,1 \rbrace ^{\mathrm {T}}\).
The same with regards to the estimated Fixing Factor \(\delta \). Attempts with \(m_{tot}\) and any single parameter \(m_i\), \(c_i\) and \(k_i\) have been performed, and confirmed that the achievable estimates of the rescaling factor do not result sensitive with the assumed known structural parameter (the differences among deviations calculated from the achieved estimates, as a function of the adopted \(P_i\), are less than \(5\%\)). Here, only results from the use of \(P=m_{tot}\) are presented. Moreover, different number of points of the signals are used for the present analysis, starting from the initial time instant, namely from a minimum of 50 points (equal to a duration of \(0.5\,\mathrm {s}\)) to a maximum of 4000 points for the entire signal (corresponding to the total duration of \(40\,\mathrm {s}\)). Tolerance levels are set as \(\varepsilon _{\theta }=10^{-6}\) and \(\varepsilon _{g}=10^{-4}\).
Sample, characteristic results are presented in Tables 4 and 5, for the length of 100, 200, 500 and 1000 sampling points, while the deviations of the estimates for all the examined cases are summarized in Figs. 2 and 3. For the natural frequencies, the maximum percentage deviation, calculated as \((f_{i,id}-f_{i,targ})/f_{i,targ}\cdot 100\), is \(0.0049\%\) (100 points case), while for the modal damping ratios is \(0.0115\%\) (50 points case). The mode shapes are always identified in an extremely effective way, since they always lead to unitary Modal Assurance Criterion (MAC) indexes, for every considered case. For the identified element-level parameters, the maximum deviations are: \(0.0105\%\) (50 points case) for \(k_i\); \(0.0179\%\) (100 points case) for \(c_i\); \(0.0181\%\) (100 points case) for \(m_i\). It can be seen that, despite the very poor number of adopted points, all estimates result very effective.
As it is visible in Fig. 2 and likely to be expected, deviations go to lower magnitudes (better estimates) for the natural frequencies with respect to the modal damping ratios. In Fig. 3 this applies to the stiffness estimates, which go to lower magnitudes for the second mode. Otherwise, results for \(m_i\), \(c_i\) and \(k_i\) appear quite similar, and not much sensitive on the adopted number of points.
Then, considering the acquisitions (4000 points) and concerning the identified input ground motion excitation, the deviations between real and estimated peak ground acceleration (PGA) and between real and estimated Root Mean Square (RMS) value are only 0.0041 and 0.0026 %, respectively (see results later shown in Sect. 4). This confirms the goodness of the achieved estimates of the input ground motion, which is effectively reconstructed by the present FDCIM technique and proves to be nearly the same as the original one. Some plots concerning the achieved estimates of the input ground motion excitations are also going to be presented in Sect. 4, for further illustration.

Percentage deviations of identified natural frequencies \(f_i\) and modal damping ratios \(\zeta _i\) with respect to target parameters as a function of adopted number of points; three-storey frame; \(m_{tot}\) Fixing Factor parameter; general viscous damping; El Centro earthquake

Percentage deviations of identified stiffness \(k_i\), damping \(c_i\) and mass \(m_i\) parameters with respect to target parameters as a function of adopted number of points; three-storey frame; \(m_{tot}\) Fixing Factor parameter; general viscous damping; El Centro earthquake
4 Addition of noise
With the purpose of assessing the goodness of the present FDCIM approach by getting closer to real operating conditions, analyses with noise-corrupted earthquake-induced synthetic response signals are also considered. Noise-corrupted cases are generated by adding a zero-mean Gaussian white noise time history to displacement, velocity and acceleration structural response acquisitions. The noise process is added to each single acquisition channel (i.e. at every storey) in terms of percentage of the Root Mean Square (RMS) ratio between the noise time history and the starting response measurement (to be corrupted by noise). Different levels of noise have been considered, starting from \(0.5\,\%\), then going to 1, 3, 5 % and finally to heavy 10 and 20 % noise cases.

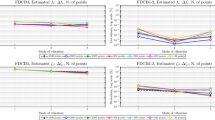
Percentage deviations of identified natural frequencies \(f_i\) and modal damping ratios \(\zeta _i\) with respect to target parameters, no-noise and noise-corrupted cases; three-storey frame, 4000 points; \(m_{tot}\) Fixing Factor parameter; general viscous damping; El Centro earthquake

Percentage deviations of identified stiffness \(k_i\), damping \(c_i\) and mass \(m_i\) parameters with respect to target parameters, no-noise and noise-corrupted cases; three-storey frame, 4000 points; \(m_{tot}\) Fixing Factor parameter; general viscous damping; El Centro earthquake
As before, sample, characteristic results are shown in Tables 6 and 7, for no-noise, 1, 5 and 20 % noise-corrupted cases, while all deviations for the examined cases are reported in Figs. 4 and 5. The maximum percentage deviations are \(1.1939\,\%\) (\(10\,\%\) noise case) and \(5.8787\,\%\) (\(20\,\%\) noise case) for the natural frequencies and modal damping ratios, respectively. Again, mode shape estimates turn out to be very effective, by showing always unitary MAC values, for all the modes and examined cases. As concerning the estimated element-level parameters, the maximum deviations are \(2.0262\,\%\) (\(10\,\%\) noise case), \(7.7325\,\%\) (\(20\,\%\) noise case) and \(3.2652\,\%\) (\(10\,\%\) noise case) for \(k_i\), \(c_i\) and \(m_i\), respectively. So, although the heavy noise-corrupted adopted cases (up to 20 % of noise), system identification keeps very much effective.
By observing Figs. 4 and 5, it is visible that natural frequencies are more accurate than modal damping ratios, even if characterized by greater dispersions. Modal damping ratios, as well as damping parameters \(c_i\), seem to be less sensitive to the amount of added noise. Element-level \(k_i\) and \(m_i\) are slightly more accurate with respect to the damping parameters, even though they are characterized by higher dispersions.

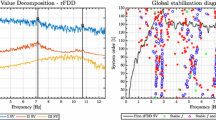
Percentage deviations of the Peak Ground Acceleration (PGA) and Root Mean Square (RMS) values of the identified input ground motion excitation with respect to target excitation, no-noise and noise-corrupted cases; three-storey frame, 4000 points; \(m_{tot}\) Fixing Factor parameter; general viscous damping; El Centro earthquake

Acceleration structural responses \(\ddot{u}_i(t)\); estimated and target input ground motion excitation \(\ddot{u}_g(t)\); no-noise and noise-corrupted cases; three-storey frame, 4000 points; \(m_{tot}\) Fixing Factor parameter; general viscous damping; El Centro earthquake
Finally, the input ground motion excitation is still identified effectively, despite for the added noise. Fig. 6 represents the trend of the deviations between real and estimated PGA and RMS, respectively. The estimates are affected by slight errors up to a \(10\,\%\) noise level; only for the 20 % noise case the deviations grow up to 21.123 and 36.780 %, for PGA and RMS, respectively. Also, Fig. 7 represents the noise-corrupted acceleration responses adopted for the analysis, at different levels of added noise, with the comparison between estimated and target input ground motion time histories \(\ddot{u}_g\). It is clear that \(\ddot{u}_g\) can be effectively estimated until the level of \(10\,\%\) noise; only with a higher noise level of \(20\%\) its reconstruction starts to get into troubles.

Estimated (with applied filtering) and target input ground motion excitation \(\ddot{u}_g(t)\); 10 and 20 % noise-corrupted cases; three-storey frame, 4000 points; \(m_{tot}\) Fixing Factor parameter; general viscous damping; El Centro earthquake
Nevertheless, a further careful observation of the estimates of the input ground motion suggests that the acquisitions are affected by a distributed noise, which can be largely removed by post-filtering such obtained data. In fact, as it can be seen in Fig. 8, data filtering can greatly improve the estimates. The application of a Chebyshev Type II lowpass filter to the identification data brings to: \(\mathrm {PGA}=3.0472\,\mathrm {m/s^2}\) (\(\Delta =0.7103\,\%\)) and \(\mathrm {RMS}=0.5077\,\mathrm {m/s^2}\) (\(\Delta =1.5704\,\%\)) for the 10 % noise case; \(\mathrm {PGA}=3.0438\,\mathrm {m/s^2}\) (\(\Delta =0.82113\,\%\)) and \(\mathrm {RMS}=0.5347\,\mathrm {m/s^2}\) (\(\Delta =3.6642\,\%\)) for the 20 % noise case. That again confirms the goodness of the achieved results, in getting closer to real scenarios.
5 Identification of a realistic ten-storey frame
In the present section, the effectiveness of the developed Full Dynamic Compound Inverse Method is further demonstrated through a rather realistic structure from the literature. The building is a ten-storey RC frame taken from the work of Villaverde and Koyama [50], whose characteristics are reported in Table 8.
This building is characterized by close modes, with all natural frequencies laying in about a 5 Hz interval. The modal characteristics of the building are reported in Table 9. Mode shapes are omitted here for brevity.
As before, the El Centro 1940 earthquake is taken as benchmark ground motion base-excitation. Again, no variations were found in terms of achievable estimates (\(\Delta < 0.00001\,\%\)) and number of iterations (\(\Delta < 5\,\%\)), as a function of the adopted initial values of \({^{0}{\varvec{\theta }_{ck}}}\) and \({^{0}{\varvec{\theta }_{m}}}\) vectors, ranging from \(10^{-6}\) to \(10^{6}\). Tolerances are set to \(\varepsilon _{\theta }=10^{-6}\) and \(\varepsilon _{g}=10^{-4}\), with a Fixing Factor \(\delta \) set on \(P=m_{tot}\).
Figures 9 and 10 display the deviations of the achievable estimates, as a function of the adopted number of points, starting from a minimum of 100 points (duration of \(1\,\mathrm {s}\)) to a maximum of 4000 points (entire response signal).
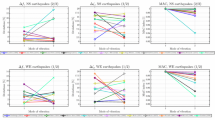
The recorded maximum deviation is \(0.000615\,\%\) (4000 points case) for the natural frequencies, while is \(0.0049\,\%\) (100 points case) for the modal damping ratios. The mode shapes always lead to unitary MAC indexes, for every considered case. With regards to the identified element-level parameters, the maximum deviations show to be: 0.0039 % (4000 points case) for \(k_i\), \(0.0295\,\%\) (100 points case) for \(c_i\) and \(0.0051\,\%\) (4000 points case) for \(m_i\). The number of required iterations is 3331, 329, 138, 281, 415 and 472 for the 100, 200, 500, 1000, 2000 and 4000 points cases, respectively. Despite the increase of the parameters to be estimated, jointly with the increase of complexity of the adopted structure, the estimates show to be very effective. Even with very short structural recordings (i.e. with a very poor number of adopted points), the algorithm reveals to be able to effectively converge, by rendering even better results than for the simpler 3-storey frame. In a sense, it looks like that, with the present 10-dofs system, namely with 10 available response signals as input source to be fed to the FDCIM algorithm, much information is available for the identification process and, even though the identification problem becomes more challenging, the inverse problem arrives at even better results.
As it can be seen in Figs. 9 and 10, the most effective estimates can be traced for the natural frequencies and for the stiffness parameters. In particular, the best estimates are located between the 2nd and the 4th modes of vibration for the natural frequencies and for the modal damping ratios (for the latter, very good estimates can be found also on the last modes of vibration). In parallel, the best estimates for \(m_i\), \(c_i\) and \(k_i\) can be found between the 4th and the 6th modes of vibration.

Percentage deviations of identified natural frequencies \(f_i\) and modal damping ratios \(\zeta _i\) with respect to target parameters as a function of adopted number of points; ten-storey frame; \(m_{tot}\) Fixing Factor parameter; general viscous damping; El Centro earthquake

Percentage deviations of identified stiffness \(k_i\), damping \(c_i\) and mass \(m_i\) parameters with respect to target parameters as a function of adopted number of points; ten-storey frame; \(m_{tot}\) Fixing Factor parameter; general viscous damping; El Centro earthquake

Percentage deviations of identified natural frequencies \(f_i\) and modal damping ratios \(\zeta _i\) with respect to target parameters, no-noise and noise-corrupted cases; ten-storey frame, 4000 points; \(m_{tot}\) Fixing Factor parameter; general viscous damping; El Centro earthquake
Further, some attempts with noise-corrupted signals are considered again for validation purposes. As seen in Sect. 4, the noise process is added to the response of each storey in terms of percentage of the Root Mean Square (RMS) ratio between the noise time history and the starting response measurement (to be corrupted by noise). The considered noise levels are 0.5, 1, 3, 5, 10, and 20 %.

Percentage deviations of identified stiffness \(k_i\), damping \(c_i\) and mass \(m_i\) parameters with respect to target parameters, no-noise and noise-corrupted cases; ten-storey frame, 4000 points; \(m_{tot}\) Fixing Factor parameter; general viscous damping; El Centro earthquake
All the achieved deviations for the examined cases are reported in Figs. 11 and 12. The maximum deviations are 0.6657 and 5.7659 % (both for the \(20\%\) noise case) for the natural frequencies and for the modal damping ratios, respectively. Again, mode shapes return always unitary MAC values, for all the modes and examined cases. As concerning the estimated element-level parameters, the maximum deviations are 3.9316, 6.5641 and 5.1500 % (both for the 20 % noise case) for \(k_i\), \(c_i\) and \(m_i\), respectively. So, despite the use of heavy noise-corrupted cases, the identification keeps to be very effective.
As before, from Figs. 11 and 12 that it can be noted the natural frequencies are more accurate with respect to the modal damping ratios. The best estimates are located between the 2nd and the 4th modes of vibration, both for the natural frequencies and for the modal damping ratios. Then, in general, the element-level estimates \(k_i\) and \(m_i\) are slightly more accurate with respect to the \(c_i\) evaluations. More in detail, the best estimates for \(m_i\), \(c_i\) and \(k_i\) can be found again between the 4th and the 6th modes of vibration.
Finally, the input ground motion excitation is still identified effectively, both with or without the added noise. For the full acquisition (4000 points, without noise), the deviations between real and estimated Peak Ground Acceleration (PGA) and between real and estimated Root Mean Square (RMS) value are only \(3.61 \times 10^{-4}\) and \(7.29 \times 10^{-5}\%\), respectively. Again, the deviations of those parameters are very limited until a 10 % noise level. Only for the 20 % noise case the deviations increase until 10.663 and 24.674 %, for PGA and RMS values, respectively.
Then, by post-filtering the obtained input ground motions, it is possible to improve the estimates, leading to \(\mathrm {PGA}=3.0637\,\mathrm {m/s^2}\) (\(\Delta =0.18547\,\%\)) and \(\mathrm {RMS}=0.5187\,\mathrm {m/s^2}\) (\(\Delta =0.57269\,\%\)) for the 20 % noise case. Those results demonstrate again the effectiveness of the developed algorithm, also by working with the present much challenging ten-storey case.
6 Conclusions
The present work has demonstrated the effectiveness of an innovative Time-Domain output-only modal dynamic identification, input estimation and element-level system identification technique, towards the simultaneous identification of modal characteristics, input excitation time history and structural parameters at the element-level by adopting earthquake-induced structural response data only. Specifically, no information on the structural system is required, for instance for the mass matrix, as typical from previous attempts in the literature, if not for a single structural parameter (for instance the total mass of the building) if a Fixing Factor shall be set to convert realizations into element-level estimates. This technique has been named Full Dynamic Compound Inverse Method (FDCIM), in order of continuity with the earlier definition and formulation in [8].
In the end, main outcomes and results on the development and application of the present FDCIM approach, with specific reference to the seismic engineering context, may be summarized as follows:
-
The theoretical framework of the FDCIM technique has been presented, starting from the underlying mathematical model and the basic governing equations, by aiming at a complete and exhaustive description of the method.
-
The developed FDCIM approach releases strong assumptions of earlier known element-level techniques, towards the simultaneous identification of modal parameters, input ground motion excitation and mass, damping and stiffness matrices at the element-level through an innovative two-stage iterative algorithm.
-
A Statistical Average technique, a modification process and a parameter projection strategy have been developed within the iterative algorithm and adopted to provide correct constraints and to achieve stronger and faster convergence on the identification estimates.
-
The proposed FDCIM method works in a completely-deterministic way, it is fully developed in State-Space form and it does not require continuous- to discrete-time transformations. Further, it does not depend on computational initialization conditions or on the state estimation, as it has been proven with the performed validation analyses.
-
Accurate estimates of all structural parameters have been provided, such as element-level mass, damping and stiffness matrices, by knowing only a single component of one of these matrices, or even by relying on an estimate of a global parameter of the structure, like for instance the total mass of the building.
-
The algorithm has been validated first with simulated data from a three-storey shear-type frame, by showing the achieved estimates for modal parameters, input ground motion excitation and element-level structural parameters, as a function of the adopted number of signal points, starting from the initial time instant. Effectiveness has been proven by relying on a minimum of 50 points to a maximum of 4000 points, i.e. on the entire signal.
-
The FDCIM approach is then applied to noise-corrupted earthquake-induced synthetic response signals, still on the three-storey frame, by considering various levels of added noise. The effective estimates coming out from the analyses further validated and confirmed the goodness of the present FDCIM identification approach, by aiming at getting closer to real conditions.
-
Finally, additional analyses with a more complex structural case, i.e. a realistic ten-storey frame from the literature have been performed, as a function of the adopted number of points and by using again noise-corrupted signals. These further and fully confirmed the results achieved from the present inverse analysis identification method.
Further on-going research will concern attempts with even more complex structures and several seismic ground motion excitations (synthetic signals), jointly with the later adoption of real earthquake-induced response data. Then, integration or support by the FDCIM to other common output-only methods working with State-Space parametric Time Domain frameworks will be addressed. Additional theoretical investigations on the FDCIM approach and on its possible further improvement will be the target of future work.
References
Au SK, Zhang FL (2016) Fundamental two-stage formulation for Bayesian system identification part I: general theory. Mech Syst Signal Process 66–67:31–42
Beck J, Jennings P (1980) Structural identification using linear models and earthquake recordings. Earthq Eng Stuct Dyn 8(2):145–160
Beck J (1982) System identification applied to strong motion records from structures. In: Datt SK (ed) Earthquake ground motion and its effects on structures. ASME Publications AMD-53, New York, pp 109–134
Behmanesh I, Moaveni B, Lombaert G, Papadimitriou C (2015) Hierarchical Bayesian model updating for structural identification. Mech Syst Signal Process 64–65:360–376
Benedetti D, Gentile C (1994) Identification of modal quantities from two earthquake responses. Earthq Eng Stuct Dyn 23(4):447–462
Brincker R, Zhang L, Andersen P (2001) Modal identification of output-only systems using Frequency Domain Decomposition. Smart Mater Struct 10(3):441–445
Celebi M, Phan LT, Marshall RD (1993) Dynamic characteristics of five tall buildings during strong and low-amplitude motions. Struct Design Tall Build 2(1):1–15
Chen J, Li J, Xu YL (2002) Simultaneous estimation of structural parameter and earthquake excitation from measured structural response, Proceeding of the International Conference on Advances and New Challenges in Earthquake Engineering Research (ICANCEER 2002), 3:537–544, 15-20 August 2002, Hong Kong, China
Chen J, Li J (2004) Simultaneous identification of structural parameters and input time history from output-only measurements. Comput Mech 33(5):365–374
Cho HN, Paik SW (2000) Time domain system identification technique with unknown input and limited observation. In: Proceeding of the 8th ASCE Specialty Conference on Probabilistic Mechanics and Structural Reliability (PMC2000), 1:1–6, 24–26 July 2000, Notre Dame, Indiana, United States
Chopra AK (2012) Dynamics of structures: theory and applications to earthquake engineering, 4th edn. Prentice Hall, Englewood Cliffs
Concha A, Icaza LA, Garrido R (2016) Simultaneous parameters and state estimation of shear buildings. Mech Syst Signal Process 70:788–810
Datta TK (2010) Seismic analysis of structures. Wiley, New York
Ding Y, Zhao BL, Wu B (2014) Structural system identification with Extended Kalman Filter and orthogonal decomposition of excitation, Mathematical Problems in Engineering, vol 2014, Article ID 987694, 10 p. doi:10.1155/2014/987694
Durbin J, Koopman S (2001) Time series analysis by state space methods. Oxford University Press, Oxford
Doebling S, Farrar C (1999) The state of the art in structural identification of constructed facilities. Report by the ASCE Committe on Structural Identification of Constructed Facilities, New York
Ghahari S, Abazarsa F, Ghannad M, Taciroglu E (2013) Response-only modal identification of structures using strong motion data. Earthq Eng Struct Dyn 42(11):1221–1242
Gomez H, Ulusoy H, Feng M (2013) Variation of modal parameters of a highway bridge extracted from six earthquake records. Earthq Eng Struct Dyn 42(4):565–579
Haldar A, Ling X, Wang D (1997) Nondestructive identification of existing structures with unknown input and limited observations, Proceeding of the 7th International Conference on Structural Safety and Reliability (ICCOSAR 97), 1:363–370, 24–28 Nov 1997, Kyoto, Japan
Hegde G, Sinha R (2008) Parameter identification of torsionally coupled shear buildings from earthquake response records. Earthq Eng Struct Dyn 37(11):1313–1331
Hoshiya M, Sutoh A (1984) Structural identification by extended Kalman Filter. J Eng Mech ASCE 110(12):1757–1770
Hoshiya M, Sutoh A (1995) Identification of input and parameters of a MDOF system, Building for the 21st Century: Proceeding of the 5th East Asia-Pacific Conference on Structural Engineering and Construction (EASEC-5), 3:1309–1314, 25–27 July 1995, Griffith, Australia
Huang C, Lin H (2001) Modal identification of structures from ambient vibration, free vibration, and seismic response data via a subspace approach. Earthq Eng Struct Dyn 30(12):1857–1878
Jiménez R, Icaza LA (2007) A real-time estimation scheme for buildings with intelligent dissipation devices. Mech Syst Signal Process 21(6):2427–2440
Lamarche C, Paultre P, Proulx J, Mousseau S (2008) Assessment of the Frequency Domain Decomposition technique by forced-vibration tests of a full-scale structure. Earthq Eng Struct Dyn 37(3):487–494
Lawson CL, Hanson RJ (1974) Solving least squares problems. Prentice Hall, Englewood Cliffs
Lei Y, Tang YL, Wang JX, Jiang YQ, Luo Y (2012) Intelligent monitoring of multistory buildings under unknown earthquake excitation by a wireless sensor network, International Journal of Distributed Sensor Networks, vol 2012, Article ID 914638, 14 p. doi:10.1155/2012/914638
Li J, Chen J (1997) Inversion of ground motion with unknown structural parameters (in Chinese). Earthq Eng Eng Vib 17(3):27–35
Li J, Chen J (2000), Structural parameters identification with unknown input, Proceeding of 8th International Conference on Computing in Civil and Building Engineering (ICCCBE-VIII), 1:287–293, 14–16 August 2000, Stanford, California, United States
Li J, Chen J (2003) A statistical average algorithm for the dynamic compound inverse problem. Comput Mech 30(2):88–95
Lin C, Hong L, Ueng Y, Wu K, Wang C (2005) Parametric identification of asymmetric buildings from earthquake response records. Smart Mater Struct 14(4):850–861
Ling X, Haldar A (2004) Element level system identification with unknown input with Rayleigh damping. J Eng Mech ASCE 130(8):877–885
Lourens E, Papadimitriou C, Gillijns S, Reynders E, De Roeck G, Lombaert G (2012) Joint input-response estimation from structural systems based on reduced-order models and vibration data from a limited number of sensors. Mech Syst Signal Process 29:310–327
Mahmoudabadi M, Ghafory-Ashtiany M, Hosseini M (2007) Identification of modal parameters of non-classically damped linear structures under multi-component earthquake loading. Earthq Eng Struct Dyn 36(6):765–782
Michel C, Guéguen P, El Arem S, Mazars J, Panagiotis K (2010) Full-scale dynamic response of an RC building under weak seismic motions using earthquake recordings, ambient vibrations and modelling. Earthq Eng Structl Dyn 39(4):419–441
Ott N, Meder HG (1972) The Kalman filter as a prediction error filter. Geophys Prospect 20(3):549–560
Perry MJ, Koh CG, Choo YS (2006) Modified genetic algorithm strategy for structural identification. Comput Struct 84(8):529–540
Perry MJ, Koh CG (2008) Output-only structural identification in time domain: numerical and experimental studies. Earthq Eng Struct Dyn 37(4):517–533
Pioldi F, Ferrari R, Rizzi E (2015) Output-only modal dynamic identification of frames by a refined FDD algorithm at seismic input and high damping. Mech Syst Signal Process 68–69:265–291. doi:10.1016/j.ymssp.2015.07.004
Pioldi F, Ferrari R, Rizzi E (2015) Earthquake structural modal estimates of multi-storey frames by a refined FDD algorithm. J Vib Control. doi:10.1177/1077546315608557, available on line
Pioldi F, Ferrari R, Rizzi E (2015) Earthquake FDD modal identification of current building properties from real strong motion structural response signals, Submitted for publication
Pioldi F, Rizzi E (2015) A refined Frequency Domain Decomposition tool for structural modal monitoring in earthquake engineering, Submitted for publication
Pioldi F, Salvi J, Rizzi E (2015) FDD modal identification from earthquake response data with evaluation of Soil-Structure Interaction effects, Proceeding of 1st International Conferene on Engineering Vibration (ICoEV2015), ISBN: 978-961-6536-97-4, 1:412–421, 7–10 September 2015, Ljubljana, Slovenia
Pridham B, Wilson J (2004) Identification of base-excited structures using output-only parameter estimation. Earthq Eng Struct Dyn 33(1):133–155
Singh JP, Agarwal P, Kumar A, Thakkar SK (2014) Identification of modal parameters of a multistoried RC building using ambient vibration and strong vibration records of Bhuj eartquake. J Earthq Eng 18(3):444–457
Smyth A, Pei J, Masri S (2003) System identification of the Vincent Thomas Bridge using earthquakes records. Earthq Eng Struct Dyn 32(3):339–367
Toki K, Sato T, Kiyono J (1989) Identification of structural parameters and input ground motion from response time histories, Proceeding of the Japan Society of Civil Engineers-Structural and Earthquake Eng. N.410/I12, 6(2):413–421
Ulusoy H, Feng M, Fanning P (2011) System identification of a building from multiple seismic records. Earthq Eng Struct Dyn 40(6):661–674
Ventura CE, Brincker R, Andersen P (2005) Dynamic properties of the Painter Street Overpass at different levels of vibration, Proceeding of the 6th Internation Conference on Structural Dynamics (EURODYN), 1:167–172, 4–7 Sept. 2005, Paris, France
Villaverde R, Koyama LA (1993) Damped resonant appendages to increase inherent damping in buildings. Earthq Eng Struct Dyn 22(6):491–507
Wang D, Haldar A (1994) Element-level system identification with unknown input. J Eng Mech ASCE 120(1):159–176
Wang XJ, Cui J (2008) A two-step method for structural parameter identification with unknown ground motion, Proceeding of the 14th World Conference on Earthquake Engineering (14-WCEE), 1:12–19, 12–17 October 2008, Beijing, China
Zhang FL, Au SK (2016) Fundamental two-stage formulation for Bayesian system identification part II: application to ambient vibration data. Mech Syst Signal Process 66–67:43–61
Zhao X, Xu YL, Chen J (2006) Hybrid identification method for multi-story buildings with unknown ground motion: theory. J Sound Vib 291(1):215–239
Acknowledgments
The Authors would like to acknowledge public research support from “Fondi di Ricerca d’Ateneo ex 60 %” and a ministerial doctoral grant and funds at the ISA Doctoral School, University of Bergamo, Department of Engineering and Applied Sciences (Dalmine).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Pioldi, F., Rizzi, E. A Full Dynamic Compound Inverse Method for output-only element-level system identification and input estimation from earthquake response signals. Comput Mech 58, 307–327 (2016). https://doi.org/10.1007/s00466-016-1292-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00466-016-1292-0