
Abstract
We explore a general family of eddy viscosity models for the large-eddy simulation of turbulence within the framework of the Variational Multiscale Method. Our investigation encompasses various fine-scale eddy viscosities and coarse-scale residual-based constructs. We delineate the domain of parameter space in which physically and mathematically suitable models exist, and identify several sub-families of potentially useful models that are either entirely new or extend previously proposed ones. We also combine classical modeling ideas, that lead to turbulent kinetic energy evolution equations, with the residual-based approach to derive a new residual-driven, one-equation dynamic model.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In the variational multiscale method (VMS) for large eddy simulation (LES) the flow field is decomposed into coarse and fine scales, that is \(\varvec{u} = \bar{\varvec{u}} + \varvec{u}'\), the fine scales are approximated, and a model for their effect is generated by explicitly using this approximation in the equations for the coarse scales.
There are two principal ways of approximating \(\varvec{u}'\). In the first approach, an approximation is computed by solving a system of discrete equations that is ostensibly as complex as the Navier–Stokes equations. This system is necessarily enhanced with a fine-scale eddy viscosity, otherwise the approach reduces to a coarse-scale direct numerical simulation (DNS). This viscosity is added to account for the effect of the scales that are finer than the approximation for \(\varvec{u}'\). For this reason these methods fall under the category of fine-scale viscosity methods. While it has generally been accepted that the eddy viscosity must only be applied to the fine scales, the precise form of this eddy viscosity, in terms of contributions from the fine and coarse scale velocities, has not been explored systematically. This is one of the main topics of this paper.
In the second approach to approximating \(\varvec{u}'\), the fine-scale velocities are approximated as a scalar function times a residual, and are expressed on the same grid as the coarse scale velocities. For this reason, this approach is often referred to as the residual-based VMS method. The scalar function is often denoted as \(\tau \), the intrinsic time scale. In model problems, such as the linear advection-diffusion equation, \(\tau \) can be explicitly calculated in terms of the fine-scale Green’s function [1, 2] resulting in \(H^1\)-optimality of the coarse scales. It may be argued that the residual-based approach, while inexpensive, does not usually lead to a sufficiently accurate reconstruction of the fine scales, at least on relatively coarse grids. On the other hand the fine-scale viscosity approach, though often accurate, is considered inefficient because the fine scales are “sacrificed” in behalf of the good behavior of the coarse scales. The second main topic of this paper is to improve the accuracy of the residual-based approach. In particular, we derive a dynamical partial differential equation for the evolution of the magnitude of the fine-scale scale velocity, which is to be solved on the same grid as the coarse-scale velocity. This equation represents a combination of classical one-equation turbulent kinetic energy models with the residual-based approach to turbulence modeling.
In summary, in this manuscript we explore the space of viable models for the approximation of the fine scales within the VMS approach. We do so for both the fine-scale viscosity and the residual-based approaches.
2 Multiscale viscosities for the fine-scale equations
2.1 Overview
There are two main classes of fine-scale viscosity approaches. The first floats the definition of the fine-scale viscosity and endeavors to solve for the fine scales in terms of the coarse scales. This approach has been pursued in the context of simple model problems such as the linear advection-diffusion equation [3, 4]. The result is an expression for the fine scales in terms of the coarse-scale residual facilitating the elimination of the fine scales from the coarse-scale equation, effectively “closing” it. Then some type of optimality is imposed on the coarse-scale solution and the fine-scale viscosity is computed to achieve it. As Brezzi [5] has shown, this reveals non-intuitive behavior of the fine-scale viscosity. The resulting coarse-scale eddy viscosity is inversely proportional to the fine-scale viscosity. In particular, in the limit of infinite fine-scale viscosity, the fine scales are completely suppressed, resulting in simply a coarse-scale DNS. In the limit of zero fine-scale viscosity, the coarse scales are over-dissipated. Of course, there is a lot of room between zero and infinity, and an appropriate value of the fine-scale viscosity coefficient can be determined to achieve optimal coarse-scale behavior.
The second main class of fine-scale viscosity approaches does not endeavor to eliminate the resolved fine scales. The resolved coarse and fine scales are solved for in a combined fashion in the usual way. In this approach the added fine-scale viscosity is parameterized to achieve improved behavior on all scales retained, namely, all resolved coarse and fine scales.Footnote 1 This idea was used to model turbulence in [6–8]. The parameterizations were inspired by traditional LES ideas and specifically the Smagorinsky model [9]. This second approach may also be interpreted as a projection stabilization method which has received considerable attention in the computational mathematics literature (see the review article [10] and references therein). By virtue of the added fine-scale viscosity term, strong residual-based consistency is lost in the fine-scale subsystem of equations. However the coarse-scale subsystem of equations continues to be strongly consistent. For fairly well-resolved LES, this approach is viewed as superior to traditional LES because of this propertyFootnote 2. There is computational evidence to support this; see e.g. [11]. For coarse LES the performance can be improved by supplementing the fine-scale viscosity with another viscosity that acts on all scales [15]. For a general discrete system (other than spectral methods), the construction of a fine-scale projection operator is required to implement this approach. One way to accomplish this is through the use of the machinery available in geometric and algebraic multigrid solvers (see e.g., [16, 17]).
2.2 Multiscale vicosities
We consider the solution of the incompressible Navier–Stokes equations in the turbulent regime using an eddy-viscosity based LES methodology derived from the VMS method. We solve for the coarse resolved velocity field \(\bar{\varvec{u}}\) with a filter width denoted by \(\bar{\Delta }\). We note that there is no model term in the equations for the coarse scales, other than the presence of the fine-scale field. The fine scales, denoted by \(\varvec{u}'\), are determined approximately by solving a set of discrete equations. The filter width associated with the fine scales is denoted by \(\Delta '\), with \(\bar{\Delta } > \Delta '\). The resulting set of coupled equations for the coarse and fine scales is the Navier–Stokes equations with an eddy viscosity that appears only in the equations for the fine scales.
In the most general case we write the model dissipation and eddy viscosity as
Here \(C'\) is a non-dimensional parameter, \(\nabla ^s\) is the symmetric gradient operator, and m, p, q, r & n are exponents that will be determined by imposing certain design conditions on the eddy viscosity.
2.2.1 Galilean invariance
We require that the eddy viscosity be unchanged if the frame of reference is translated by a constant velocity. Since this constant velocity mode is assumed to be present in the space of coarse resolved scales, we must have \(m=0\). As a result (2) reduces to
2.2.2 Dimensional consistency
We require that the proposed eddy viscosity have the dimension \(L^2 T^{-1}\), where L denotes length and T denotes time. This gives us the constraints that \(r+n = 2\) and \(p+q+r = 1\). With these constraints (3) reduces to
Remarks
-
1.
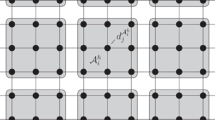
We note that the turbulent viscosity is now a two-parameter (p, r) family of functions (see Fig. 1). The simplest model, namely the Smagorinsky eddy viscosity [9, 18], is obtained by setting \(r = 0\) and \(p=1\),
$$\begin{aligned} \nu _T = (C')^2 (\Delta ')^{2} | \nabla ^s \bar{\varvec{u}}|. \end{aligned}$$(5)Note that this is not the classical Samgorinsky viscosity model because its action is restricted to the fine scales. However, if it is applied to all scales its effect is relatively uniform over all resolved wavenumbers. It is said to create a “plateau” [11, 19, 20].
-
2.
Assuming that the space of the fine-scale velocities is constructed such that \(\varvec{u}' = \varvec{0}\) at the walls, then as long as \(r>0\) and \( p + r <1\), \(\nu _T\) will be zero at the walls consistent with known boundary layer behavior.

Schematic representation of the two-parameter space of models. The intersection of the two shaded regions contains models with vanishing viscosity at the walls. The four dashed lines represent the families of models examined in detail. The four points represent large-small (1, 0), small-small (0, 0), turbulent energy (0, 1), and the modified plateau Smagorinsky (1 / 2, 1 / 2) models. The triangle with vertices (0, 0), (1, 0), and (1, 1) seems to contain the most attractive opportunities for fine-scale models
2.3 Estimating \(C'\)
Using Lilly’s analysis [21] it is possible to estimate the parameter \(C'\) for any combination of p and r by assuming an infinite inertial sub-range. That is we assume that
where E(k) is the kinetic energy spectrum, \(\alpha \) is the Kolmogorov constant, \(\epsilon \) is the dissipation rate, and k is the wavenumber. Using this expression the quantities on the right-hand side of (4) may be estimated as follows. First,
which yields
Similarly,
which yields
and,
which yields
Using (4), (8), (10), (12), along with \(\Delta ' = \frac{\pi }{k'}\), in (1), and equating the model dissipation to the total dissipation, we arrive at the following expression for \(C'^2\),
where \(a = \frac{k'}{\bar{k}} = \frac{\bar{\Delta }}{\Delta '}\) is the ratio of the two filter widths. We note that the viscosity parameter \(C'\) is only a function of the exponents r and p, and the ratio of the filter widths a. These parameters are known in any simulation, hence \(C'\) can be determined using the formula above.
Remark
In the analysis above we assumed that the turbulent viscosity was active only in the equations for the fine scales. However, often the turbulent viscosity is applied to all scales. In this case the model dissipation is given by
while the expression for \(\nu _T\) is remains the same (that is (4)). Recognizing that
and using (4), (8), (10), (12), along with \(\Delta ' = \frac{\pi }{k'}\), in (14), we arrive at the following expression for \(C'^2\),
We note that (13) is valid when the turbulent viscosity is applied only to the fine scales, and (16) is valid when it is applied to all scales (coarse and fine).
2.4 Some specific models
We now examine models that are obtained by making specific choices for the exponents p and r (see Fig. 1).
-
1.
The choice \(r =2\) eliminates the explicit length scale dependence in the expression for the eddy viscosity (4) and yields,
$$\begin{aligned} \nu _T = (C')^2 | \nabla ^s \bar{\varvec{u}}|^p | \nabla ^s \varvec{u}'|^{-1-p} | \varvec{u}'|^2. \end{aligned}$$(17)This is particularly useful for unstructured grids where the filter width is not easy to precisely estimate. Further, for wall bounded flows, assuming that \( | \nabla ^s \bar{\varvec{u}}|\) and \(| \nabla ^s \varvec{u}'|\) are non-zero, this model yields \(\nu _t \sim | \varvec{u}'|^2 \sim y^2\), which corresponds to the Van Driest wall law [22] variation. Here we have assumed that the fine scales in the numerical solution will replicate the correct scaling with wall distance, that is \(|\varvec{u}'| \sim y\). There is however some potential for instability in this model since at least one out of the two rates of strain, \( | \nabla ^s \bar{\varvec{u}}|\) and \(| \nabla ^s \varvec{u}'|\), appears in the denominator. In regions where these strains are small this viscosity might be too large. This potential instability also affects dynamic Smagorinsky models [23–25]. In that case volume-averaging of the denominator and/or adding a small, positive non-zero constant to the denominator, are sometimes utilized. The choice, \(p = 1\), in (17) yields an eddy viscosity that closely resembles the discontinuity-capturing directional dissipation (DCDD) viscosity proposed in [14].
-
2.
The choice \(r =0\) eliminates the fine-scale velocity in the expression for the eddy viscosity (4) and yields,
$$\begin{aligned} \nu _T = (C')^2 (\Delta ')^{2} | \nabla ^s \bar{\varvec{u}}|^p | \nabla ^s \varvec{u}'|^{1-p}. \end{aligned}$$(18)This model generalizes two multiscale models that have been utilized previously [7, 8, 26], that is the large-small and small-small models, which are obtained by setting \(p=1\) and \(p=0\), respectively. Models of this type have been shown to produce the correct “cusp-like” behavior of the spectral representation of eddy viscosity [11, 19, 20].
-
3.
The choice \(r =1-p\) eliminates the fine-scale strain-rate in the expression for the eddy viscosity (4) and yields,
$$\begin{aligned} \nu _T = (C')^2 (\Delta ')^{p+1} | \nabla ^s \bar{\varvec{u}}|^p | \varvec{u}'|^{1-p}. \end{aligned}$$(19)In order to avoid velocity or strain-rate terms in the denominator p must be chosen so that \(0 \le p \le 1\). In this interval we create a Smagorinsky-like model that, due to the dependence on \(| \varvec{u}'|^{1-p}\), modulates the decay rate of the eddy-viscosity plateau (in the wavenumber space) of the Smagorinsky model. For example with \(p = 1/2\) we have
$$\begin{aligned} \nu _T = (C')^2 (\Delta ')^{3/2} | \nabla ^s \bar{\varvec{u}}|^{1/2} | \varvec{u}'|^{1/2}. \end{aligned}$$(20) -
4.
The choice \(r =1\) yields,
$$\begin{aligned} \nu _T = (C')^2 \Delta ' \left( | \nabla ^s \bar{\varvec{u}}|/ | \nabla ^s \varvec{u}'|\right) ^p | \varvec{u}'|, \end{aligned}$$(21)which is an eddy viscosity where \(| \varvec{u}'|\) determines the fluctuating velocity and the \( \Delta '\) determines the length-scale. A special form of this viscosity, obtained by setting \(p=0\) was proposed by Lilly [21], and used in the context of the VMS method to simulate incompressible and compressible turbulent hydrodynamics, and incompressible MHD flows [27]. In that case the eddy viscosity was given by,
$$\begin{aligned} \nu _T = (C')^2 \Delta ' | \varvec{u}'|. \end{aligned}$$(22)Given this connection to the “turbulent energy” model proposed by Lilly [21], the eddy viscosity in (21) may be thought of as a generalization of the Lilly model.
3 Residual-based approach
In the residual-based approach, an algebraic relation is typically used to approximate the fine scales [28]. Further, this approximation is evaluated on the same grid that is used to compute the coarse scales. Both these considerations make this approach less expensive than the fine-scale eddy viscosity approach described in the previous section. However, this also means that the fine scales are not very accurate, when the LES is not well resolved. Typically, the expression for \(\varvec{u}'\) takes the form,
where \(\tau \) represents an intrinsic time-scale for the problem, which can be determined from the fine-scale Green’s function for steady model advection-diffusion problems [2]. It can be shown for the one-dimensional steady advection-diffusion equation that this formula leads to the nodally exact \(C^0\)-continuous linear finite element method for the coarse scales [29]. In this case the \(\tau \) is the element mean value of the fine-scale Green’s function. A comprehensive exposition is presented in [2]. The quantity \(\varvec{\mathcal {R}}^m(\bar{\varvec{U}})\), given by
represents the momentum residual of the Navier–Stokes equations when operating on the coarse-scale solution \(\bar{\varvec{U}} \equiv [\bar{\varvec{u}},\bar{p}]^T\). Note that when this residual vanishes, that is the coarse scales can capture the entire solution of the Navier–Stokes equations, the fine scales also vanish. This property gives this approach its consistency. However, this approximation has certain obvious drawbacks. For example, for effects such as the finite rate of decay (in time) of the fine scales, or the convection of the fine scales by the coarse scales, or the amplification of the fine scales by the mean shear of the coarse scales, it relies only on changes in the residual. It does not rely on a partial differential equation where these effects are explicitly included within the differential operator on the left hand side.
The dynamic behavior of the fine scales has been accounted for in the work of Codina et al. [30, 31]. A simple version of this idea replaces (23) with the fine-scale evolution equation,
In the context of (25), the formula in (23) is said to refer to as steady, or static, fine scales because they emanate from the solution of a steady model equation, whereas the fine scales in (25) are referred to as dynamic subgrid scales.
3.1 A new dynamical model for \(\varvec{u}'\)
Motivated by the shortcomings of the algebraic model, we propose a new dynamical model for \(\varvec{u}'\). We note that we are interested in an approximation to \(\varvec{u}'\) that represents its average effect (over the filter width) in the equation for the coarse scales. The fact that we are interested in the average effect, and not a detailed description of the fine scales, allows us to solve for these velocities on the same coarse grid as the coarse-scale velocities.
We begin with the assumption that the fine-scale approximation is given by
That is, the fine-scale velocity field is oriented in the opposite direction to the coarse scale residual. This assumption is motivated by the approximations in (23) and (25). However, its magnitude, \(u' = \sqrt{2k}\), where \(k = \frac{1}{2} \overline{ |\varvec{u}'|^2}\) is the filtered fine-scale kinetic energy. Next we derive an equation to determine k, and hence \(u'\).
The momentum equation in the incompressible Navier–Stokes equations is given by
Introducing the separation \(\varvec{u} = \bar{\varvec{u}} + \varvec{u}'\) and retaining all the fine-scale terms on the left-hand side, yields,
Taking the dot product of this equation with \(\varvec{u}'\) and making use of the divergence-free condition for both \(\bar{\varvec{u}}\) and \( \varvec{u}'\), we arrive at
Spatially filtering this equation with a filter of width \(\bar{\Delta }\), and assuming that the filter commutes with differentiation, yields the following terms, some of which are subsequently modeled.
-
1.
The time derivative term,
$$\begin{aligned} \overline{\frac{\partial }{\partial t}\left( \frac{|\varvec{u}'|^2}{2}\right) } = \frac{\partial }{\partial t}\bigg ( \overline{ \frac{|\varvec{u}'|^2}{2}\bigg ) } = \frac{\partial k}{\partial t}. \end{aligned}$$(30) -
2.
The convective term,
$$\begin{aligned} \overline{\bar{\varvec{u}}\cdot \nabla \left( \frac{|\varvec{u}'|^2}{2}\right) } \approx \bar{\varvec{u}}\cdot \nabla \bigg (\overline{\frac{|\varvec{u}'|^2}{2}} \bigg ) = \bar{\varvec{u}}\cdot \nabla k. \end{aligned}$$(31) -
3.
The production term,
$$\begin{aligned} \overline{\nabla ^s \bar{\varvec{u}}:\varvec{u}' \otimes \varvec{u}'} \approx -C_1 | \nabla ^s \bar{\varvec{u}} | k. \end{aligned}$$(32)We note that this model for the production term is similar to the one used in the Spalart-Allmaras model [32]. Further, \(C_1\) is a parameter whose value may be determined by benchmarking against canonical flows.
-
4.
The fine-scale flux term,
$$\begin{aligned}&\overline{\nabla \cdot \bigg ( \left( p' + \frac{|\varvec{u}'|^2}{2} \right) \varvec{u}' - \nu \nabla \left( \frac{|\varvec{u}'|^2}{2}\right) \bigg )}\nonumber \\= & {} \nabla \cdot \bigg ( \overline{\left( p' + \frac{|\varvec{u}'|^2}{2} \right) \varvec{u}' - \nu \nabla \left( \frac{|\varvec{u}'|^2}{2}\right) } \bigg ) \nonumber \\\approx & {} \nabla \cdot \left( - \frac{\nu _T}{\sigma _k} \nabla k\right) . \end{aligned}$$(33)Here we have made use of the gradient-diffusion hypothesis which is often used in the k-equation in RANS models [33]. The term \(\nu _T\) represents the turbulent viscosity, and many options (including several described in this paper) are available for representing this. Finally, \(\sigma _k\) is the turbulent Prandtl number, which is typically an O(1) constant.
-
5.
The dissipation term,
$$\begin{aligned} \overline{\nu | \nabla \varvec{u}'|^2}\approx & {} C_2 \frac{k^{3/2}}{\bar{\Delta }}. \end{aligned}$$(34)Here we have made use of an approximation that is typically used in single-equation RANS models (see for example, [34]). Further \(C_2\) is a parameter whose value may be determined by applying the model to canonical flows.
-
6.
The source term,
$$\begin{aligned} \overline{- \varvec{u}' \cdot \varvec{\mathcal {R}}^m(\bar{\varvec{U}})}\approx & {} \overline{| \varvec{u}'| \frac{\varvec{\mathcal {R}}^m(\bar{\varvec{U}})}{|\varvec{\mathcal {R}}^m(\bar{\varvec{U}})|} \cdot \varvec{\mathcal {R}}^m(\bar{\varvec{U}})} \nonumber \\= & {} \overline{|\varvec{u}'| |\varvec{\mathcal {R}}^m(\bar{\varvec{U}})|} \nonumber \\\approx & {} \left( \overline{|\varvec{u}'|^2}\right) ^{1/2} |\varvec{\mathcal {R}}^m(\bar{\varvec{U}})| \nonumber \\= & {} \sqrt{2k} |\varvec{\mathcal {R}}^m(\bar{\varvec{U}})|. \end{aligned}$$(35)In the first line of the equation above we have assumed that the true fine-scale velocity is oriented in the opposite direction to the coarse-scale residual. We note that this term does not have a counterpart in any of the usual RANS models. It is however, a critical term in our model. It contributes only when the coarse scale residual is non-zero, and hence provides consistency to our method.
Using the approximations enumerated above in the filtered form of (29) we arrive at an equation for the filtered fine-scale kinetic energy, viz.,
The salient difference between (36) and the traditional modeled k-equation in RANS [33, 35] is the right-hand-side dependence on the the residual of the coarse scales, \(\varvec{\mathcal {R}}^m(\bar{\varvec{U}})\), which is absent in traditional models.
Remarks
-
1.
Our final approximation for the fine-scale velocity field is given by (26), where \( u' = \sqrt{2k}\), and satisfies (36).
-
2.
We note that like the algebraic approximation, the new equation for k, and hence the dynamical approximation for \(\varvec{u}'\), is driven by the coarse-scale residual. However, unlike the algebraic approximation it contains the effects of the convection, production, diffusion, and destruction of the fine scales by the coarse scales. This represents a significant improvement over the simple algebraic relation for the fine scales.
-
3.
Since k is a filtered quantity, (36) may be solved on the same coarse grid as \(\bar{\varvec{u}}\).
-
4.
It is possible to derive an explicit equation for \(u'\), the magnitude of the approximate fine-scale velocity, from (36) once a formula for \(\nu _T\) has been selected. For example, if we assume that \(\nu _T = C_4 u' \bar{\Delta }\) and substitute this, and \(k = u'^{\;2}/2\), in (36), we arrive at
$$\begin{aligned}&u'_{,t} + \bar{\varvec{u}}\cdot \nabla u' - \frac{C_1}{2} | \nabla ^s \bar{\varvec{u}} | u' - u' \nabla \cdot \left( \frac{\bar{\Delta }}{\sigma _k} \nabla u'\right) \nonumber \\&\quad -\,\, 2 \frac{\bar{\Delta }}{\sigma _k} |\nabla u'|^2+ \frac{C_2}{2\sqrt{2}} \frac{u'^{\;2}}{\bar{\Delta }} = |\varvec{\mathcal {R}}^m(\bar{\varvec{U}})|. \end{aligned}$$(37)In this equation, the constant \(C_4\) has been absorbed in the definition of the Prandtl number.
4 Conclusions
We have assumed a very general form of a multiscale eddy viscosity model depending on a filter width, the fine-scale velocity field, the coarse-scale velocity field, and the gradients of the coarse-scale and fine-scale velocity fields. Using physical and mathematical realizability conditions, we have delineated a restricted set of models and identified its potentially interesting members. In addition, we have considered coarse-scale residual-based approaches in the modeling of turbulence. Combining classical ideas used in RANS modeling, with residual-based concepts, which are the backbone of stabilized and VMS methods, we have derived a new dynamic model for the turbulent kinetic energy, which is driven by the coarse-scale residual.
Notes
This is still a debatable point. There is some evidence that the fine scales are being sacrificed to benefit the coarse scales, and other evidence that the fine-scale contribution improves both the coarse and fine scales.
References
Hughes TJR, Feijóo GR, Mazzei L, Quincy J-B (1998) The variational multiscale method-a paradigm for computational mechanics. Comput Methods Appl Mech Eng 166(1–2):3–24
Hughes TJR, Sangalli G (2008) Variational multiscale analysis: the fine-scale Green’s function, projection, optimization, localization, and stabilized methods. SIAM J Numer Anal 45(2):539–557
Hughes TJR, Scovazzi G, Franca LP (2004) Multiscale and stabilized methods. Wiley Online Library, Hoboken
Guermond J-L (2001) Subgrid stabilization of galerkin approximations of linear monotone operators. IMA J Numer Anal 21(1):165–197
Brezzi F, Houston P, Marini D, Süli E (2000) Modeling subgrid viscosity for advection-diffusion problems. Comput Methods Appl Mech Eng 190(13):1601–1610
Hughes TJR, Mazzei L, Jansen KE (2000) Large eddy simulation and the variational multiscale method. Comput Vis Sci 3:47–59
Hughes TJR, Mazzei L, Oberai AA, Wray AA (2001) The multiscale formulation of large eddy simulation: decay of homogeneous isotropic turbulence. Phys Fluids 13(2):505–512
Hughes TJR, Oberai AA, Mazzei L (2001) Large eddy simulation of turbulent channel flows by the variational multiscale method. Phys Fluids 13(6):1784–1799
Smagorinsky J (1963) General circulation experiments with the primitive equations. I. The basic experiment. Mon Weather Rev 91:99–164
Braack M, Lube G (2009) Finite elements with local projection stabilization for incompressible flow problems. J Comput Math 27(2–3):116–147
Hughes TJR, Wells GN, Wray AA (2004) Energy transfers and spectral eddy viscosity in large-eddy simulations of homogeneous isotropic turbulence: Comparison of dynamic Smagorinsky and multiscale models over a range of discretizations. Phys Fluids 16(11):4044
Chang K, Hughes TJR, Calo VM (2012) Isogeometric variational multiscale large-eddy simulation of fully-developed turbulent flow over a wavy wall. Comput Fluids 68:94–104
Motlagh YG, Ahn HT, Hughes TJR, Calo VM (2013) Simulation of laminar and turbulent concentric pipe flows with the isogeometric variational multiscale method. Comput Fluids 71:146–155
Tezduyar TE (2003) Computation of moving boundaries and interfaces and stabilization parameters. Int J Numer Methods Fluids 43(5):555–575
Wanderer J, Oberai AA (2008) A two-parameter variational multiscale method for large eddy simulation. Phys Fluids 20:085107
Koobus B, Farhat C (2004) A variational multiscale method for the large eddy simulation of compressible turbulent flows on unstructured meshes-application to vortex shedding. Comput Methods Appl Mech Eng 193(15–16):1367–1383
Gravemeier V, Gee MW, Kronbichler M, Wall WA (2010) An algebraic variational multiscale-multigrid method for large eddy simulation of turbulent flow. Comput Methods Appl Mech Eng 199(13):853–864
Colosqui CE, Oberai AA (2008) Generalized smagorinsky model in physical space. Comput Fluids 37(3):201–217
Kraichnan RH (1976) Eddy viscosity in two and three dimensions. J Atmos Sci 33:1521–1536
Oberai AA, Gravemeier V, Burton G (2014) Transfer of energy in the variational multiscale formulation of LES. Technical report, CTR Annual Research Briefs, Center for Turbulence Research, Stanford University/NASA Ames Research Center, Stanford, CA 94305
Lilly DK (1966) On the application of the eddy viscosity concept in the inertial subrange of turbulence. Technical report, NCAR manuscript 123, Boulder
Van Driest ER (1956) On turbulent flow near a wall. J Aerosp Sci 23:1007–1011
Germano M, Piomelli U, Moin P, Cabot WH (1991) A dynamic subgrid-scale eddy viscosity model. Phys Fluids 3(7):1760–1765
Ghosal S, Lund TS, Moin P, Akselvoll K (1995) A dynamic localization model for large-eddy simulation of turbulent flows. J Fluid Mech 286:229–255
Oberai AA, Wanderer J (2005) Variational formulation of the Germano identity for the Navier-Stokes equations. J Turbul 6(7):1–17
Hughes TJR, Calo VM, Scovazzi G (2005) Variational and multiscale methods in turbulence. In: Mechanics of the 21st Century, pages 153–163. Springer
Oberai AA, Liu J, Sondak D, Hughes TJR (2014) A residual based eddy viscosity model for the large eddy simulation of turbulent flows. Comput Methods Appl Mech Eng 282:54–70
Bazilevs Y, Calo VM, Cottrell JA, Hughes TJR, Reali A, Scovazzi G (2007) Variational multiscale residual-based turbulence modeling for large eddy simulation of incompressible flows. Comput Methods Appl Mech Eng 197(1–4):173–201
Hughes TJR (1995) Multiscale phenomena: Green’s functions, The Dirichlet-to-Neumann formulation, subgrid scale models, bubbles, and the origins of stabilized methods. Comput Methods Appl Mech Eng 127:387–401
Codina R, Principe J (2007) Dynamic subscales in the finite element approximation of thermally coupled incompressible flows. Int J Numer Meth Fluids 54(6–8):707
Codina R, Principe J, Ávila M (2010) Finite element approximation of turbulent thermally coupled incompressible flows with numerical sub-grid scale modelling. Int J Numer Methods Heat Fluid Flow 20(5):492–516
Spalart PR, Allmaras SR (1992) A one-equation turbulence model for aerodynamic flows. In: AIAA, Aerospace Sciences Meeting and Exhibit, 30 th, Reno, NV, page 1992
Jones WP, Launder BE (1972) The prediction of laminarization with a two-equation model of turbulence. Int J Heat Mass Transf 15(2):301–314
Pope SB (2000) Turbulent flows. Cambridge University Press, Cambridge
Prandtl L Über ein neues formelsystem für die ausgebildete turbulenz, nachr. d. akad. d. wiss. Göttingen, Math.-nat. Klasse, pages 6–20, 1945
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Oberai, A.A., Hughes, T.J.R. A palette of fine-scale eddy viscosity and residual-based models for variational multiscale formulations of turbulence. Comput Mech 57, 629–635 (2016). https://doi.org/10.1007/s00466-015-1242-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00466-015-1242-2