
Abstract
Computational models based on the phase-field method typically operate on a mesoscopic length scale and resolve structural changes of the material and furthermore provide valuable information about microstructure and mechanical property relations. An accurate calculation of the stresses and mechanical energy at the transition region is therefore indispensable. We derive a quantitative phase-field elasticity model based on force balance and Hadamard jump conditions at the interface. Comparing the simulated stress profiles calculated with Voigt/Taylor (Annalen der Physik 274(12):573, 1889), Reuss/Sachs (Z Angew Math Mech 9:49, 1929) and the proposed model with the theoretically predicted stress fields in a plate with a round inclusion under hydrostatic tension, we show the quantitative characteristics of the model. In order to validate the elastic contribution to the driving force for phase transition, we demonstrate the absence of excess energy, calculated by Durga et al. (Model Simul Mater Sci Eng 21(5):055018, 2013), in a one-dimensional equilibrium condition of serial and parallel material chains. To validate the driving force for systems with curved transition regions, we relate simulations to the Gibbs-Thompson equilibrium condition (Johnson and Alexander, J Appl Phys 59(8):2735, 1986).
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The modeling of microstructure evolution has become very essential in material science and physics. Phase-field methods become increasingly important with its capability to simulate complicated morphological evolution, in response to the evolution of the different thermodynamic physical fields, while incorporating the influence of capillarity. Therefore the phase-field method has been established for simulating the microstructural evolution in a wide variety of material processes, such as solidification, solid-state phase transformations, precipitate growth and coarsening, martensitic transformations and grain growth [5]. In the phase-field method, we typically map a given sharp interface free boundary problem onto a diffuse interface that is constructed out of smoothly varying phase-field order parameters. The different physical fields (concentration, stress, strain etc.) vary continuously across the constructed interface following the variation of the order parameters. Such a construction is advantageous because it obviates the requirement to track the interface between the phase boundaries during microstructural evolution [6], as morphological evolution is implicitly described through the spatiotemporal evolution of the different order parameters. Concomitant with the evolution of the phase-fields the different physical fields related to the mass, momentum and energy are self-consistently described using appropriate conservation equations. Although the process is elegant, appropriate care must be exercised in the construction of the evolution equations of the phase-fields and the conservation equations, which generally require homogenization of the variables exhibiting jumps across the interface in the original sharp interface problem. In the absence of the correct homogenization scheme, artificial jumps in the continuous variables could be introduced in the problem, which then leads to an incorrect mapping with respect to the actual free-boundary problem.
Describing solid state transformation processes or predicting microstructure and mechanical property relations, an accurate calculation of the stresses and mechanical energy at the transition region is indispensable. This requires that the effective material parameters are defined in the diffuse-interface regions in non-homogeneous materials, which is usually performed by homogenization of the material parameters using smooth varying functions constructed out of the spatially varying phase-fields. In the phase-field community, there are several known homogenization approaches, see [7] for an overview of approaches. Khachaturyan’s model [8] is widely established in phase-field applications. In absence of nonelastic strains, the model of Khachaturyan is equal to the Voigt/Taylor (VT) homogenization scheme [1] between locally overlapping phases. The main assumption of the VT approach is that the strains of overlapping phases are the same. With an order parameter \(\phi \) the stress in the isostrain two phase case reads as
\(\varvec{\epsilon }\) is the local strain, which in turn depends on the gradient of displacement field \({\left( \varvec{\nabla } \varvec{u}\right) }_{ij}=\partial u_i / \partial x_j\) by \(\varvec{\epsilon } = \big ( \varvec{\nabla } \varvec{u} + {(\varvec{\nabla } \varvec{u})}^T\big )/2\), and \(\sigma _{ij} = {\left( \varvec{\mathcal {C}} [\varvec{\epsilon } - \tilde{\varvec{\epsilon }}]\right) }_{ij} = \mathcal {C}_{ijkl}(\epsilon _{kl} - \tilde{\epsilon }_{kl})\) is the particular stress component using the Einstein summation convention. \(\varvec{\tilde{\epsilon }}^\alpha \) and \(\varvec{\mathcal {C}}^\alpha \) represent the local nonelastic strain and the stiffness tensor of phase \(\alpha \). \(h(\phi )\) is the interpolation function which is in the simplest case \(h(\phi )=\phi \). This approach is employed in [9–12]. Assuming equal stresses in the transition region results in stress, due to the Reuss/Sachs (RS) [2] approximation
where \(\varvec{\mathcal {S}}^\alpha \) is the compliance tensor of phase \(\alpha \). This local homogenization sheme has been discussed by Steinbach [13] and Apel et al. [14]. Ammar et al. [7] propose a Hashin-Shtrikman homogenization between locally existing phases and present an accurate comparison between Khachaturyan’s, VT, RS and their own approach. In a recent publication, Durga et al. [3] investigate the excesses of the stress, strain and the elastic energy for both, the VT and RS interpolation to estimate the material properties at the interface. As a result of the calculations, it is clear that under conditions of uniaxial loading of the interface, the RS interpolation delivers an excess free interface, while the conditions of a parallel material circuit with a complete shear loading require a VT interpolation such that there is no excess contribution from the bulk energy density to the surface energy. With this motivation, the respective paper proposes a model by combining the VT and RS interpolation schemes wherein, a VT interpolation is imposed, in order to derive the tangential stress component and the RS scheme is utilized to determine the stress components on the normal plane. Although, the model promises a new perspective, there is a problem with the associated formulation. In the description of the model, the stress, strain and stiffness tensor need to be transformed into a coordinate system consisting of the interfacial normal and of another orthogonal direction in the plane of separation of the phases. To derive a solution, the transformed state of stress is assumed to be a principal state. This is a physically unrealistic situation, given there exist purely shear problems in materials science involving precipitate growth. Hence, the assumption is restrictive and makes the model not globally applicable.
VT and RS methods offer approximations for two limits of the real material parameters for locally overlapping phases. When using these schemes, the approximation of elastic constants is only valid in one-dimensional special cases. The VT limit provides an exact stiffness for a one-dimensional parallel material circuit of different materials and the RS approximation does this for a one-dimensional material chain. For all other cases, jump conditions at the transition zones, from one material to the other, have to be fulfilled in order to calculate the correct stresses or strains.
The equilibrium jump condition is a force balance in the normal direction of the interface and the Hadamard condition in the tangential direction [15]. Based on these jump conditions, we formulate a quantitative phase-field elasticity model. Comparing the simulated stress and strain profiles with the theoretically predicted fields in a one dimensional serial and parallel material chain setup as well as for a plate with a round inclusion under hydrostatic tension, we highlight the quantitative characteristics of the model. Kim et al. [16], Plapp [17] Choudhury and Nestler [18] pointed out for solidification processes, that a driving force, which contains only homogeneous variables, avoid the interfacial excess energy. The proposed model uses normal components of the stresses and tangential components of the strains, for the definition of consistent potential type and consequently for the formulation of the driving force. In order to validate the elastic contribution of the driving force, we generate one dimensional equilibrium conditions in the normal and tangential directions and demonstrate the absence of excess energy.
2 Model formulation
2.1 Phase-field
The model is based on a generalized phase-field approach for microstructure evolution in multi-phase and multi-component systems [19]. In a two phase system, only one order parameter \(\phi \) is needed, which represents the volume fraction of phase \(\alpha \). Accordingly the volume fraction of phase \(\beta \) is \(1-\phi \). The energy functional can be expresses in the form
where \(f_{el}(\phi , \varvec{\epsilon })\) denotes an elastic energy density contribution as a function of the local strain \(\varvec{\epsilon }\). The gradient energy density in Eq. (3) reads \(a(\varvec{\nabla } \phi ) = \gamma _{\alpha \beta }|\varvec{\nabla } \phi |^2\), as presented in [19], where \(\gamma _{\alpha \beta }\) represents the surface energy density between the phases \(\alpha \) and \(\beta \). We further use an obstacle-type formulation \(\omega _{ob} = 16 \gamma _{\alpha \beta }\phi (1-\phi ) / \pi ^2\) as the potential. \(\varepsilon \) is a small length scale parameter related to the diffuse interface thickness. Following the Ginzburg–Landau analysis, the interface traction \(\dot{\phi }= \partial \phi / \partial t\) is proportional to a variational derivative of the functional (3) with respect to the order parameter \(\phi \). The proportionality constant is the mobility of the interface \(1 / \tau \). The evolution equation for the order parameter \(\phi \) is obtained according to
where the variational derivative writes as
We solve explicitly the momentum balance equation,
for the evolution of displacement field \(\varvec{u}\), until the mechanical equilibrium \(\rho \ddot{\varvec{u}} = \varvec{0}\) is reached. \(\rho \) is the mass density and \((\varvec{\nabla } \cdot \varvec{\sigma })_i = \partial \sigma _{ij} / \partial x_j\) defines the stress divergence. \(\ddot{\varvec{u}}=\partial ^2 \varvec{u} / \partial t^2\) is the second partial time derivative of \(\varvec{u}\).
2.2 Solid–solid jump conditions
The mechanical jump conditions for a bounded solid–solid transition are the underlying physical equations of the proposed model. For a sharp interface theory in the case of singular surface, the force balance reads [15]
with the normal vector \(\varvec{n}\) at the interface between \(\alpha \) and \(\beta \) phase and the corresponding jump of stresses \([\![\varvec{\sigma }]\!]\). The traction vector \(\varvec{t}_{tr} = \varvec{\sigma }^\alpha \varvec{n} = \sigma ^\alpha _{ij} n_j\) on the left and \(\varvec{t}_{tr} = \varvec{\sigma }^\beta \varvec{n}\) on the right of the transition zone are continuous functions at the singular surface. Apart from the continuity of the displacement field \(\varvec{u}\), the Hadamard jump condition follows for \(\varvec{\nabla } \varvec{u}\) accordingly to [15]
\({\left( \varvec{a} \varvec{n}^T\right) }_{ij} = a_i n_j\) is the dyadic product of an arbitrary vector \(\varvec{a}\) and the normal vector \(\varvec{n}\). The jump of the deformation gradient \([\![\varvec{\nabla } \varvec{u} ]\!]\) vanishes in the tangential direction and implies a no slip boundary condition. If we multiply two tangential vectors \(\varvec{t}\) and \(\varvec{s}\) with \(\langle \varvec{t}, \varvec{n} \rangle = t_i n_i = 0\) and \(\langle \varvec{s}, \varvec{n} \rangle = 0\) it can be seen, that \([\![\varvec{\nabla } \varvec{u} ]\!]\varvec{t} = \varvec{0}\) and \([\![\varvec{\nabla } \varvec{u} ]\!]\varvec{s} = \varvec{0}\).
2.3 Energy formulation
As seen in the previous section the jump conditions (7) and (8) depend on the interface orientation \(\varvec{n}\). The basic idea of our approach is to transform the stresses and strains to the basis fixed on \(\varvec{n}\) and then to calculate the energy using only homogeneous variables, which are given by the jump conditions (7) and (8). For the manageability of the calculations, we neglect the eigenstrains \(\tilde{\varvec{\epsilon }}\) in the first step and include them afterwards.
The base \(\varvec{B}\), which is fixed due to \(\varvec{n}\), is given by \(\varvec{B}=\{\varvec{n},\varvec{t},\varvec{s}\}\), with \(\langle \varvec{n}, \varvec{t} \rangle = 0\), \(\langle \varvec{n}, \varvec{s} \rangle = 0\), \(\langle \varvec{t}, \varvec{s} \rangle = 0\) and the normal vector of the transition region
with \(|\varvec{\nabla } \phi | = \sqrt{\langle \varvec{\nabla } \phi , \varvec{\nabla } \phi \rangle }\) as the norm of \(\varvec{\nabla } \phi \). The transformation of the stress tensor \(\varvec{\sigma }\) to the base coordinate system \(\varvec{B}\) writes as
\(\varvec{Q}\) is a locally defined orthonormal matrix
The traction vector \(\varvec{t}_{tr} = \varvec{\sigma }_B \varvec{n}\) can now be written in the transformed coordinate system
With the previous relations formed in the coordinate system \(\varvec{B}\), the continuity of the traction vector \(\varvec{t}_{tr}\) in the normal direction results in the continuity of stress components \(\sigma _{nn}, \sigma _{nt}\) and \(\sigma _{ns}\). Similarly the Hadamard condition (8) leads to the continuity of the strain components \(\epsilon _{tt},\epsilon _{ss}\) and \(\epsilon _{ts}\). Thereby the jump conditions (7) and (8) are equivalent to

This means, that in a jump between the phases, the normal components of \(\varvec{\sigma }_B\) and the tangential components of \(\varvec{\epsilon }_B\) are homogeneous. Using the Voigt notation, the transformation of stresses and strains reads
with \(\varvec{M}^v_\sigma \) and \(\varvec{M}^v_\epsilon \) as transformation matrices (see Appendix for the definition) and the corresponding variables in Voigt notation
We reorder the components of the strain and stress vectors to separate the normal and tangential components and define
The superscript \(\alpha \) denotes that the particular variable is non homogeneous and dependent on the particular phase. The homogeneous variables are denoted without a superscript and are defined according to the jump conditions (13). Because of this reformulation, we permute the rows of the transformation matrices and derive the following expressions from Eqs. (14) and (15)
Thereby, are \(\varvec{M}_\sigma \) and \(\varvec{M}_\epsilon \) transformation matrices (see Appendix for the definition) for stresses and strains directly in the used base notation, which is defined by Eqs. (18) and (19). Using that notation and the relation \(\varvec{M}^{-1}_\sigma =\varvec{M}^{T}_\epsilon \) [20], the free elastic energy for the bulk phase \(\alpha \) can be written in the form
with \(\varvec{\mathcal {C}}^\alpha \) as the stiffness tensor of phase \(\alpha \) in the Voigt notation. In order to simplify the derivations, we break the stiffness tensor into different blocks
where \(\mathcal {C}_{nn}^\alpha \) and \(\mathcal {C}_{tt}^\alpha \) are symmetric matrices of \(3\times 3\) dimensions and \(\mathcal {C}_{nt}^\alpha \) is a \(3\times 3\) matrix with \(\mathcal {C}_{tn}^\alpha =\mathcal {C}^{\alpha ^T}_{nt}\). With the previous notations in Eqs. (18), (19) and (23), we rewrite the expression of the free elastic energy of the \(\alpha \) phase as a sum of scalar products in the appropriate spaces

The elastic energy \(f^\alpha _{el}(\varvec{\epsilon }_B^\alpha )\) is a function of homogeneous \(\varvec{\epsilon }_t\) and non homogeneous variables \(\varvec{\epsilon }_n^\alpha \). The discontinuity of \(\varvec{\epsilon }_n^\alpha \) is indicated by the superscript \(\alpha \). Now we are able to dissolve the whole dependence of \(\varvec{\epsilon }_n^\alpha \). This can be done in two ways. We can replace \(\varvec{\epsilon }_n\) in Eq. (24) for the elastic potential energy, but then we have to deal with excess energy correction terms [16] in order to receive a quantitative formulation. Another way is to follow the approach of Plapp [17], Choudhury and Nestler [18] to generate a potential which is only dependent on homogeneous system variables. Therefore we consider the elastic contribution of the driving force for phase transition.
2.4 Elasticity driving force contribution
The traction of the particular order parameter is proportional to the variational derivative of the functional \({\mathcal {F}}(\phi , \varvec{\nabla } \phi , \varvec{\epsilon })\), which is given by Eq. (3). The derivatives of the gradient energy density \(a(\varvec{\nabla } \phi )\) and the potential \(\omega (\phi )\) are described e.g. in [19] or [18]. Here we are focusing only on the derivative \(\partial / \partial \phi \) for the variation of the elastic contribution of \({\mathcal {F}}(\phi , \varvec{\nabla } \phi , \varvec{\epsilon })\).
The interface gives the orientation of the reference coordinate system by the gradient vector \(\varvec{\nabla }\phi \) which in turn represents the directions in which stresses and strains are decomposed, using Eqs. (18) and (19). The driving force is the total elastic energy of the system, which writes as the interpolated sum of the elastic energies of two phases weighted with the smooth function \(h(\phi )\) and \(h(1-\phi )=1-h(\phi )\), respectively. According to Eq. (24), the energy of the phases can be expressed as
We note that the superscripts \(\alpha , \beta \) are mentioned only on the non-homogeneous variables. The elastic driving force contribution is given by the variation of \(f_{el}\) with respect to \(\phi \)
To perform the first part of the variation, we just note the following interpolations that must result out of the jump condition in normal direction (see Eqs. (7) and (12)) namely
The derivative of \(f_{el}\) at constant \(\varvec{\epsilon }^\alpha _B\) writes as
In order to determine, the derivatives of the non homogeneous variable with respect to the variation in the phase-field order parameter \(\phi \), we utilize the expressions in Eq. (27). Since we require the partial derivatives at constant \(\varvec{\epsilon }^\alpha _B\), it implies the differentiation of both sides in expression (27). It gives us the following relation
Rewriting Eq. (28), substituting the relation (29) and using the condition that, the normal components of stresses are homogeneous \(\varvec{\sigma }_n = \partial f_{el}^\alpha / \partial \varvec{\epsilon }_n^\alpha = \partial f_{el}^\beta /\partial \varvec{\epsilon }_n^\beta \), the variational derivative simplifies as
Reordering the particular components in Eq. (30), the derivative results as
\(p^\alpha (\varvec{\sigma }_n, \varvec{\epsilon }_t)\) and \(p^\beta (\varvec{\sigma }_n, \varvec{\epsilon }_t)\) are bulk potentials, which include only homogeneous variables \(\varvec{\sigma }_n\) and \(\varvec{\epsilon }_t\). Both bulk potentials weighted with the smooth function \(h(\phi )\) and \(h(1-\phi )\) correspondingly produce
The particular bulk potentials are composed of a Legendre transform of the bulk elastic energy density \(f_{el}^\alpha \) with respect to \(\varvec{\epsilon }_n^\alpha \)
and the corresponding part of \(\beta \) phase.
For the divergence part of the variation in Eq. (26), we calculate \(x\)-component of the derivative at a constant \(\varvec{\epsilon }^\alpha _B\)
with \({\phi _x = \left( \varvec{\nabla } \phi \right) }_x\). Similar expressions of the derivative results for the \(y\) and \(z\) components. Assuming isotropic bulk materials follow for material parameters \(\varvec{\mathcal {C}}_B^\alpha =\varvec{\mathcal {C}}^\alpha \) and \(\varvec{\mathcal {C}}_B^\beta =\varvec{\mathcal {C}}^\beta \). Since the material parameters are constant in the particular free energy density, the derivatives \(\partial \varvec{\mathcal {C}}^\alpha / \partial \phi _x = \partial \varvec{\mathcal {C}}^\beta / \partial \phi _x = \mathbf{0}\) are zero. The first term of Eq. (34) is zero, because the interpolation function is independent of \(\varvec{\nabla } \phi \). The partial derivatives are evaluated at constant \(\varvec{\epsilon }^\alpha _B=(\varvec{\epsilon }_n, \varvec{\epsilon }_t)\), so that the derivative \(\partial \varvec{\epsilon }_t / \partial \phi _x\) vanishes in Eq. (34). To evaluate the last term, we differentiate both sides of relation (27) with respect to \(\phi _x\) at constant \(\varvec{\epsilon }_n\) and have
Substituting the previous relation in Eq. (34) and using \(\partial f_{el}^\alpha / \partial \varvec{\epsilon }_n^\alpha = \partial f_{el}^\beta / \partial \varvec{\epsilon }_n^\beta =\varvec{\sigma }_n\), we obtain \(\partial f_{el} / \partial \varvec{\nabla } \phi =\mathbf{0}\). Therefore, the driving force part arising out of the divergence term \(\varvec{\nabla } \cdot \partial f_{el} / \partial \phi _x\) is zero. Therefore the elastic contribution to the driving force equals to
with the potential \(P(\phi , \varvec{\nabla } \phi , \varvec{\sigma }_n, \varvec{\epsilon }_t)\) as described in Eq. (32). For anisotropic bulk materials constants (\(\varvec{\mathcal {C}}_B^i \ne \varvec{\mathcal {C}}^i\)) an additional driving force contribution must be taken into account. Comparing the bulk densities \(p^i\) with the Eshelby Tensor for small deformations \(\varvec{b}\) [15, 21]
we notice, that the jump \([\![p(\varvec{\sigma }_n, \varvec{\epsilon }_t) ]\!]\) of the particular bulk densities \(p^i(\varvec{\sigma }_n, \varvec{\epsilon }_t)\) is exactly equal to the jump of \(nn\) components of the Eshelby Tensor Eq. (37)
2.5 Effective material parameters
The potential of the particular phase \(\alpha \) defined only with continuous variables \(\varvec{\sigma }_n\) and \(\varvec{\epsilon }_t\) is given by the Legendre transform of the elastic energy with respect to \(\varvec{\epsilon }_n^\alpha \) (see Eq. (33)). All the discontinuities are excluded from the variables and can be incorporated in the material parameter as presented in the following.
Using Eq. (24) results in the following derivative
Reformulating the previous equation, we get an expression for the non-homogeneous variable
The formulation of \(\varvec{\epsilon }_n^\alpha \) considers all shear components of the normal stresses \(\varvec{\sigma }_n\) and of the tangential strains \(\varvec{\epsilon }_t\). This makes the proposed approach more general in comparison with the proposed model by Durga et al. [3].
By inserting the expression (40) into (33), we get an energy term that is only dependent on homogeneous system variables
with the material parameter matrix
In order to get the total energy in the interface, we summarize the bulk energies \(p^\alpha (\varvec{\sigma }_n,\varvec{\epsilon }_t)\) and \(p^\beta (\varvec{\sigma }_n,\varvec{\epsilon }_t)\) that are weighted with the order parameter \(\phi \) by multiplying with the smooth function \(h(\phi )\) and \(h(1-\phi ) = 1 -h(\phi )\), respectively. We define the homogeneous variable \(\varvec{\xi } :={(\varvec{\sigma }_{n}, \varvec{\epsilon }_{t})}^T\) and get
\(\varvec{\mathcal {\bar{T}}}\) is thereby the linear interpolation of the material parameters
The derivative of the potential \( P(\phi ,\varvec{\nabla }\phi ,\varvec{\xi })\) with respect to the homogeneous variable \(\varvec{\xi }={(\varvec{\sigma }_{n}, \varvec{\epsilon }_{t})}^T\), yields the non homogeneous variable
The sign of the normal component of \(\varvec{\chi }\) changes due to the reverse Legendre transformation. \(\varvec{\mathcal {\bar{T}}}\) is a new formulation of the proportionality tensor between the homogeneous variables \(\varvec{\xi } = {(\varvec{\sigma }_n, \varvec{\epsilon }_t)}^T\) and their dependent counterparts \(\varvec{\chi }={(- \varvec{\epsilon }_n, \varvec{\sigma }_t)}^T\). The proportionality tensor is influenced by the interface orientation \(\varvec{\nabla }\phi \) and the order parameter \(\phi \). Using the segmentation in Eq. (23) yields
where the parts are
2.6 Incorporation of eigenstrains
The complexity of the proposed model increases, if we incorporate non-elastic strains \(\tilde{\varvec{\epsilon }}^\alpha \) for the individual phase \(\alpha \) into the system. The non-elastic strains can either be a constant eigenstrain \(\varvec{\epsilon }_0^\alpha \), a plastic strain \(\varvec{\epsilon }_{pl}^\alpha \), an eigenstrain dependent on the concentration \(\varvec{\epsilon }_0^\alpha (c)\) or temperature \(\varvec{\epsilon }_0^\alpha (T)\) or even the sum of different non-elastic strain contributions
Using the Voigt notation and the transformation in Eq. (10), the expression for the elastic energy Eq. (24) results in
Transforming the calculations in Sect. 2.5, we determine the components in \(\varvec{n}\)-direction by
Replacing the whole dependence of \(\varvec{\epsilon }_n^\alpha \) in the elastic energy formulation (49) by the Legendre transformation results in a potential, which is only dependent on \(\varvec{\sigma }_n\) and \(\varvec{\epsilon }_t\)
Separating the eigenstrain contribution in the previous expression reduces the potential to
With \(\varvec{\xi } = {(\varvec{\sigma }_n,\varvec{\epsilon }_t)}^T\), the corresponding result for the total elastic potential density is
2.7 Calculation of stresses in diffuse interface systems
The formulation of the mixed energy is done in the base \(\varvec{B}\) given by the normal vector of the interface \(\varvec{n}\) and its tangential counterparts \(\varvec{t}\) and \(\varvec{s}\). Now we derive the expression for stress depending on strain, which is given in the Cartesian coordinate system.
We start from the total elastic potential density in Eq. (54). The total strains in the normal direction \(\varvec{\epsilon }_n\) are given by the derivative of the elastic potential density
with \(\tilde{\varvec{\chi }}_n\) as the eigenstrain contribution in the normal direction
For the normal components of the stress \(\varvec{\sigma }_n\), we obtain
The tangential components of the stress tensor are given by the derivative
with \(\tilde{\varvec{\chi }}_t\) as the eigenstress contribution in the tangential direction
Replacing the normal component of \(\varvec{\sigma }\) by applying Eq. (57) results in the following equation for the tangential stresses
Using the Eqs. (57) and (60) leads to the stress components in expressed in base coordinate system
\(\varvec{{\mathcal {K}}}_B(\phi )\) is the stiffness tensor and \(\tilde{\varvec{\sigma }}_B(\phi )\) contains the eigenstresses in the transition region. Consequently the effective eigenstrains follow
Transforming this expression back to the Cartesian coordinate system using Eqs. (20) and (21), yields the effective stiffness and the effective eigenstrains in the transition region
We recover the Hook’s Law for the region of overlapping phases in the Voigt notation and Cartesian coordinate system
with \(\varvec{\sigma }^v\) as the stress and \(\varvec{\epsilon }^v\) the total strain in the Voigt notation, as defined in Eqs. (16) and (17).
3 Simulation results
In order to validate the proposed model, representative simulations are performed. The stress, strain and energy fields, which result from this, are compared to the analytical predictions and resulting fields using the Voigt/Tailor (VT) (1) and Reuss/Sachs (RS) (2) local homogenisation schemes. All simulations are performed using the release version 2.1 of the Pace3D package.
3.1 Serial and parallel material chains under tension
First we discuss a one-dimensional serial material chain shown on the left side in Fig. 1, with a diffuse transition region from the phase \(\alpha \) to \(\beta \) in the center of the chain. Such a construction represents a two-phase sample with a sharp transition in the center. As boundary condition, we use constant stress in x-direction and zero stresses in other directions. Consequently, the stress in x-direction, which is the normal direction \(nn\) (see Eq. (9)) of the interface \(\sigma _{xx} = \sigma _{nn} = \sigma _0\), is constant in mechanical equilibrium over the whole material chain. The resulting normal strain in the bulk is \(\epsilon _{nn}^\alpha = \epsilon _{xx}^\alpha = \sigma _0 / E_\alpha \) for the phase \(\alpha \) and \(\epsilon _{nn}^\beta = \epsilon _{xx}^\beta = \sigma _0 /E_\beta \) for the phase \(\beta \). With \(E_\alpha = 0.1 E_\beta \) as the corresponding Young’s modulus, the normal component of strain \(\epsilon _{nn}^\alpha = 10\epsilon _{nn}^\beta \) follows with a jump at the position of the sharp interface. In the case of a sharp interface, marked by superscript SI, the average normal strain of the sample \(\epsilon _{nn}^{av.} = ( \epsilon _{nn}^\alpha + \epsilon _{nn}^\beta )/2\) and the total mechanical energy result in \(W^{SI}_{tot.} = l \epsilon _{nn}^{av.} \sigma _0 / 2 = 11 l \sigma _0^2 / (4 E_\beta )\), with \(l\) as the length of the simulation domain. Consequently, a quantitative diffuse interface model should reproduce the strain and energy density jump in the center of the domain and the resulting total energy should be equal to \(W^{SI}_{tot.}\). The left part of Fig. 1 shows the resulting strain \(\epsilon _{nn}\) and mechanical energy density profiles \(W\) of the serial material chain derived with VT, RS and the proposed model. The strain and the energy density profiles of the RS and the proposed model follow exactly the corresponding volume fraction profile of the material, which is given by the order parameter \(\phi \). The position of strain and energy density jump is in the center of the simulation domain. The total energy, calculated by a line integral over the simulation domain, is \(W^{RS}_{tot.}=W^{new}_{tot.}=W^{SI}_{tot.}\). The strain and energy density profile of VT does not match the ideal profile and the corresponding total energy deviates from the analytic value \(W^{VT}_{tot.} \approx 0.9 W^{SI}_{tot.}\).

Serial 1D material chain (left) and parallel 1D material chain (right). Constant stress \(\sigma _0\) is applied in x-direction for the serial material chain and constant strain is applied in y-direction for the parallel chain. (Color figure online)
On the right side of Fig. 1, the results of the parallel material chain are shown. The used boundary conditions are a constant strain \(\epsilon _0\) in y-direction, which is the tangential direction \(tt\) of the interface, and zero stress in other directions. The bulk tangential stresses are \(\sigma _{tt}^\alpha =\sigma _{yy}^\alpha = E_\alpha \epsilon _0\) and \(\sigma _{tt}^\beta = \sigma _{yy}^\beta = E_\beta \epsilon _0\) with a jump in the center of the material chain in the sharp interface description. The average tangential stress for the system is \(\sigma _{tt}^{av.} = (\sigma _{tt}^\alpha + \sigma _{tt}^\beta ) / 2 = \epsilon _0 (E_\alpha + E_\beta ) / 2\). The total energy results in \(W^{SI}_{tot.} = l \epsilon _0 \sigma _{tt}^{av.} / 2 = (11/4) l \epsilon _0^2\). The tangential stress and energy density profiles calculated with VT and the proposed method follow the corresponding volume fraction and the total energy is given by \(W^{VT}_{tot.}=W^{new}_{tot.}=W^{SI}_{tot.}\). The profiles calculated with RS do not match the ideal line and consequently deviate the corresponding total energy from theoretical value \(W^{RS}_{tot.} \approx 0.9 W^{SI}_{tot.}\).
These one-dimensional simulations show that the assumption of constant strains in the diffuse interfacial region is only valid for the tangential components and that the assumption of constant stresses in the interface is only valid for the normal components.
3.2 Stress profiles of a plate with inclusion compared with theory
The simulations presented in Sect. 3.1 show that the proposed model describes the serial and parallel material chain exactly, where only the normal or tangential components of stresses and strains are acting, respectively. In order to validate the presented model in a more realistic system, we model a two-dimensional plate under plain strain conditions with a soft cylindrical inclusion under hydrostatic tension and compare the stress, strain and energy density fields, with theoretical predictions [22]. The simulation setup is shown in Fig. 2 top left. We insert a circular inclusion with a radius of \(r=100\) cells (\( \hbox {1 cell} = 1 \times 1{\upmu \hbox {m}}\)) in a simulation domain of \(1300\times 1300\) cells. The used width of the transition region between the phases is \(\lambda \approx 2.5 \varepsilon \approx 12\) cells. We choose an isotropic stiffness tensor with Young’s modulus \(E_s = 210\hbox { GPa}\) for the plate, \(E_i = 0.1 E_s\) for the soft inclusion and an equal Poisson’s ratio for both phases \(\nu _s = \nu _i = 0.3\). The hydrostatic tension is realized by a constant stress \(\sigma _0 = 100 \hbox { MPa}\) around the plate. In order to split the stress and strain fields in the normal and tangential components, we use the cylindrical coordinates for the underlying radial symmetric system. Thereby we can write \(\sigma _{nn} = \sigma _{rr}\), \(\epsilon _{nn} = \epsilon _{rr}\), \(\sigma _{\theta \theta } = \sigma _{tt}\) and \(\epsilon _{\theta \theta } = \epsilon _{tt}\). We evaluate the stress, strain and energy profiles in the transition zone between the solid and the inclusion. Therefore, we plot the corresponding field profiles, calculated with Voigt/Taylor, Reuss/Sachs, and the proposed model in comparison with theoretically predicted profiles along the green highlighted line in Fig. 2 top left.

Stress and strain profiles calculated with VT, RS and a proposed model of a plate with a soft cylindrical inclusion (\(\varvec{\mathcal {C}}^i = 0.1 \varvec{\mathcal {C}}^s\)) under hydrostatic tension conditions compared with theoretical predictions [22]. The particular field profiles are plotted along the green line pictured in the simulation setup on the top left side. For comparison the energy density profile calculated according to Durga et al. [3] (see Eq. (66)) is plotted. (Color figure online)
We observe the same results as for the one-dimensional simulations in (Sect. 3.1). There is a deviation from the theoretically calculated profiles of the non homogenous variables \(\sigma _{tt}\) and \(\epsilon _{rr}\) that are calculated using VT or RS methods respectively. The two-dimensional simulations show an additional deviation in the bulk phases for the homogenous variables \(\sigma _{nn}\) and \(\epsilon _{tt}\). These deviations in stresses and strains cause a deviation in the elastic potential energy \(W\) in the transition region, as well as in the bulk. The bulk energy deviation depends on the curvature \(\kappa \) and on the interface width \(\lambda \). For the underlying simulation with \(\kappa \lambda \approx 0.12\), we have a deviation of \(7.3 ~\%\) for VT and a deviation of \(7.4 ~\%\) for RV results. For a larger \(\kappa \) and \(\lambda \) product, e.g. \(\kappa \lambda \approx 0.8\), the deviation is raised to \(29 ~\%\) for VT and \(27 ~\%\) for RS. The profiles of the homogenous and non homogenous variables, calculated with the proposed model, match very well with the theoretical predictions. Hence the deviation of bulk energy densities for \(\kappa \lambda \approx 0.12\) is negligibly small (\(\approx 0.2 ~\%)\). For \(\kappa \lambda \approx 0.8\), which is an extreme value for a proper description of a curved interface, we get a deviation of \(\approx 6 ~\%\).
As mentioned in the introduction, Durga et al. [3] presented a model where the stress and strain fields are calculated separately with VT and RS which then combine the corresponding strain and stress components for the energy calculation. Using this model, the energy density for the underlying radial symmetric system results in
Thereby, the non homogeneous variables are defined as [3]
and the corresponding components for the inclusion. As shown in Fig. 2 energy density \(W^{Durga}\) provides the expected energy profile in the transition region. However, the profile does not match the theoretical value within the inclusion. This deviation is caused by the deviation of \(\sigma _{rr}^{RS}\) and \(\epsilon _{tt}^{VT}\), which serve as the basis for the calculation of \(W^{Durga}\) (see Eq. (66)).
3.3 Validation of the driving force
For solidification processes, Kim et al. [16], Plapp [17] Choudhury and Nestler [18] pointed out, that using a potential which only uses homogenous variables avoid the interfacial excess energy. Durga et al. [3] have shown, that also in the case of elasticity, there is an excess energy in the interface and they have demonstrated their impact [3]. In order to demonstrate that the proposed model does not produce an energy excess in the interface, we generate one-dimensional equilibrium states for the serial and parallel material chain. The simulation setups are the same as the ones we used in Sect. 3.1. In addition, we calculate the evolution of the order parameter given by Eq. (4) with the elastic contribution to the driving force given by Eq. (36).
For the case of serial material chains, the equilibrium conditions are \(\sigma _{nn}^\alpha = \sigma _{nn}^\beta \) and \(p^\alpha (\varvec{\xi })=p^\beta (\varvec{\xi })\). The first condition is fulfilled by the chosen boundary conditions \(\sigma _{nn}^\alpha = \sigma _{nn}^\beta = \sigma _0\). Due to the underlying one-dimensional problem, the particular energy density given by Eq. (53) decreases to
Assuming that the eigenstrain in the softer phase is zero \(\tilde{\epsilon }^\beta _{nn}=0\), the eigenstrain in the \(\alpha \) phase for serial material chain follows from the second equilibrium condition reading
Figure 3 pictures the strain and \(\phi \) equilibrium profiles in the left diagrams. The order parameter profile calculated with RS and proposed model follow the initial \(\phi \) profile. The resulting interface width \(\lambda \) is equal to the theoretical value \(\lambda = \pi ^2 \varepsilon / 4 \approx 2.5 \varepsilon \). The solution calculated with VT model shows a deviation in \(\epsilon _{nn}\) and \(\phi \) from the ideal profile.

Equilibrium profiles of \(\phi \) and \(\epsilon _{nn}\) correspondingly \(\sigma _{tt}\) for the serial (left) and parallel (right) material chain calculated with VT, RS and the proposed new model. The chosen nondimensionalized initial surface energy \(\gamma _0=5 \times 10^{-3}\) for the serial and \(\gamma _0=4 \times 10^{-6}\) for the parallel material chain. (Color figure online)
In the case of parallel material chain, the equilibrium conditions change to \(\epsilon _{tt}^\alpha = \epsilon _{tt}^\beta = \epsilon _0\) and \(p^\alpha (\varvec{\xi })=p^\beta (\varvec{\xi })\). With the assumption \(\tilde{\epsilon }^\beta _{nn}=0\) and the equality of bulk energy densities, the following set of equations hold
The resulting \(\sigma _{tt}\) and \(\phi \) equilibrium profiles are pictured in Fig. 3 on the right. While the equilibrium \(\phi \) profiles calculated with VT and the proposed model are equal to the initial \(\phi \) profile, the equilibrium \(\phi \) profile calculated with RS model becomes broader.
The reason for the change of equilibrium interface widths \(\lambda _{eq}\) is the elastic interfacial excess energy. Kim et al. [16] and Cha et al. [23] pointed out the role of interfacial excess energy and calculated the equilibrium interface width \(\lambda \) and surface energy \(\gamma \) for solidification in binary systems. For the presented model we obtain
with \(\Delta P(\phi , \varvec{\nabla } \phi , \varvec{\xi }) = P(\phi , \varvec{\nabla } \phi , \varvec{\xi }) - p^\alpha (\varvec{\xi }) - p^\beta (\varvec{\xi })\) as the elastic energy density difference between values at the interface and that of the bulk phases. Durga et al. [3] calculated and illustrated the elastic contribution to interfacial excess energy for different interface widths. For the proposed model the elastic contribution of interfacial energy excess of a one-dimensional two phase domain is defined as
Applying Eqs. (72), (73) and (74) to other models, the energy density \(P(\phi , \varvec{\nabla } \phi , \varvec{\xi })\) has to be replaced correspondingly. For an odd profile \(P(\phi , \varvec{\nabla } \phi , \varvec{\xi })\), which is antisymmetric at \(\phi = 0.5\), the elastic interfacial energy excess \(W_{el}^{xs}\) vanishes and we retrieve the expected values for \(\lambda = \pi ^2 \varepsilon / 4\) and \(\gamma = \gamma _0\). Each deviation from this profile leads to an excess energy contribution \(W_{el}^{xs} \ne 0\), which distorts the equilibrium \(\phi \) and which in turn modifies the resulting interface width \(\lambda \) and surface energy \(\gamma \), according to Eqs. (72), (73). Figure 4 images this context. An elastic energy density profile which is antisymmetric at the \(\phi =0.5\) point changes the equilibrium interface width and surface energy. The energy profile of the serial chain calculated with VT model or the energy profile of parallel chain calculated with RS model (see Fig. 1), are elastic energy densities with non antisymmetric profiles at the \(\phi =0.5\) isoline. We find a change of both, the interface width as well as the surface energy. Using an energy density, which depends only on homogenous variables, avoids an energy excess in the interface and the expected values for \(\lambda \) and \(\gamma \) follow. This context is shown and applied to solidification processes by Choudhury and Nestler [18]. The proposed model uses the homogenous variable \(\varvec{\xi }={(\varvec{\sigma }_n, \varvec{\epsilon }_t)}^T\) in the formulation of \(P(\phi , \varvec{\nabla } \phi , \varvec{\xi })\), see Eq. (43). All discontinuities are incorporated in the material parameter \(\varvec{\mathcal {T}}(\phi , \varvec{\nabla } \phi )\). The excess energy \(W_{el}^{xs}\) vanishes and the equilibrium \(\phi \) profile does not distort in a stationary solution of Eq. (4), as pictured in Fig. 3 for parallel and serial material chain. Consequently, the elastic contribution to the driving force does not modify the equilibrium values of \(\lambda \) and \(\gamma \), as shown in Fig. 3 for a mount of \(W^\alpha /\gamma _0\) ratios.

Equilibrium interface widths \(\lambda \) and corresponding surface energies \(\gamma \) for the serial (left) and parallel (right) material chains with variating initial surface energy \(\gamma _0\). (Color figure online)
3.4 2D equilibrium through Gibbs–Thomson effect
In two dimensions, an interfacial equilibrium condition can be reached using the Gibbs–Thomson effect. For a circular inclusion of radius \(r_i\), embedded in a matrix material, an equilibrium is reached, if the surface energy is equal to the potential energy. Such a condition satisfies the following local condition [4, 24, 25]
where \(\omega ^s, \omega ^i\) are the grand canonical energy densities of the solid and the inclusion respectively. \(\bar{\kappa }=1 /r_i\) is the mean curvature and \(\varGamma _{si}\) is the excess grand canonical energy density at the transition surface. \(\varvec{\epsilon }^s_{n} - \varvec{\epsilon }^i_{n} = [\![\varvec{\epsilon }_n ]\!]\) is the jump of strains and \(\varvec{\sigma }_{n}\) the corresponding stress component in the normal direction of the transition surface. The present investigation concentrates on the mechanical contribution, thus the jump of grand canonical energy densities reduces to the jump of elastic energy density \(\omega ^s - \omega ^i = [\![\omega ]\!]= [\![W_{el} ]\!]\) at the sharp interface transition surface. For purely elastic systems, the Gibbs–Thomson Eq. (75) reduces to
with \(\gamma _{si}\) as the surface energy density. The left part of the previous expression is nothing else then the difference of particular Eshelby Tensors (see Eq. (37)) in \(nn\) direction. As already mentioned in Sect. 2.4 jump of the Ehselby Tensors in \(nn\) direction \(\left\langle \varvec{n}, [\![\varvec{b} ]\!]\varvec{n}\right\rangle \) is equal to the jump of bulk densities \([\![p(\varvec{\sigma }_n, \varvec{\epsilon }_t) ]\!]\). It comes as no surprise, that in a sharp interface limit, the elastic contribution of the Gibbs–Thomson Eq. (76) is exactly equal to the elastic driving force contribution of the proposed model \(\partial P(\phi , \varvec{\nabla } \phi , \varvec{\sigma }_n, \varvec{\epsilon }_t) / \partial \phi \).
We choose the simulation setup of Sect. 3.2. Furthermore we use the theoretically predicted stress fields of Mai and Singh [22] and calculate the equilibrium surface energy density \(\gamma _{si}^{eq}\) according to Eq. (76)
\(\epsilon ^{th}_{\theta \theta }(r_i)\) and \(\sigma ^{th}_{\theta \theta }(r_i)\) are the theoretical values at the transition surface. The theoretical description of Mai and Singh [22] for the underlying problem requires a load \(\sigma _\infty \), which acts in infinity. In order to fit this value we compare the outer energy of the simulation with the energy of theoretical description at appropriate distance. Thereby we have ensured, that the outer energies of the simulation and the theoretical description are equal. This condition is satisfied for \(\sigma _\infty = 1.009712\sigma _0\) and a chosen value of \(\sigma _0 = 100\) MPa in the simulation.
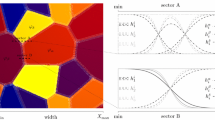
Figure 5 (left) shows the energy field near the equilibrium condition calculated with the proposed model. The growth or shrinkage plot of the inclusion for different surface energy densities \(\gamma _{si}\) is shown on the right. This plot demonstrates the quantity of the proposed driving force including 2D structures and curved surfaces. The elastic driving force of our model is consistent with the theoretically predicted ones, described by Eq. (77).

2D validation of the proposed model over the Gibbs–Thomson effect. The computed energy field is shown on the left. The energy profiles on top right refer to simulations, which satisfy the condition \(\gamma _{si} / \gamma ^{eq}_{si}(r_i)=1\) and which are plotted along the green marked line. The growth or shrinkage of the inclusion for different surface energy densities \(\gamma _{si}\) are shown in the bottom right diagram. (Color figure online)
4 Conclusion
In this paper, we present a quantitative elasticity phase-filed model for solid–solid systems. Despite the diffuse interface, which is indispensable for the phase-field models, the method satisfies the mechanical jump conditions. Comparing the simulated stress profiles in a plate with a round inclusion under hydrostatic tension with theoretically predicted stress fields, we show the quantitative characteristics of the resulted fields. The presented one dimensional equilibrium simulations demonstrate the quantity of the elastic driving force contribution and show the limits of VT and RS model. Both the interface width as well as the surface energy remain stable at equilibrium applying the proposed model regardless of the elastic driving force contribution. The two-dimensional equilibrium simulations, according to the Gibbs–Thomson effect, demonstrate the quantity of the proposed elastic driving force contribution on curved surfaces. We show a connection of the formulated bulk potentials with the Eshelby Tensor and demonstrate, that the proposed elastic driving force contribution is exactly equal to the elastic contribution of the Gibbs–Thomson equation.
Additionally we offer the possibility to calculate the stresses for the particular phase \(\varvec{\sigma }_B^\alpha = {(\varvec{\sigma }_n, \varvec{\sigma }_t^\alpha )}^T\) in the transition region. The normal component is equal for both phases and the tangential component is given by
with \(p^\alpha (\varvec{\sigma }_n, \varvec{\epsilon }_t)\) as described in Eq. (53). The quantitative stresses of the particular phase is important to solve the yield criterion in order to calculate plastic strain. For example the Prandtl–Reuss model [26] with von Mises yield criterion and linear isotropic hardening approximation can be used. The coupling of the resulted phase dependent plastic strain \(\varvec{\epsilon }_{pl}^\alpha \) with the proposed model is straightforward using Eq. (48).
References
Voigt W (1889) Über die Beziehung zwischen den beiden Elastizitätskonstanten isotroper Körper. Annalen der Physik 274(12):573
Reuss A (1929) Berechnung der Fließgrenze von Mischkristallen auf Grund der Plastizittitsbedingung fiir Einkristalle. Z Angew Math Mech 9:49
Durga A, Wollants P, Moelans N (2013) Evaluation of interfacial excess contributions in different phase-field models for elastically inhomogeneous systems. Model Simul Mater Sci Eng 21(5):055018
Johnson WC, Alexander JID (1986) Interfacial conditions for thermomechanical equilibrium in two-phase crystals. J Appl Phys 59(8):2735
Moelans N, Blanpain B, Wollants P (2008) An introduction to phase-field modeling of microstructure evolution. Calphad 32(2):268
Chen LQ (2002) Phase-field models for microstructure evolution. Annu Rev Mater Res 32(1):113
Ammar K, Appolaire B, Cailletaud G, Forest S (2009) Combining phase field approach and homogenization methods for modelling phase transformation in elastoplastic media. Revue européenne de mécanique numérique 18(5–6):485
Khachaturyan A (1983) Theory of structural transformation in solids. Wiley, New York
Spatschek R, Müller-Gugenberger C, Brener E, Nestler B (2007) Phase field modeling of fracture and stress-induced phase transitions. Phys Rev E 75(6):1
Mennerich C, Wendler F, Jainta M, Nestler B (2011) A phase-field model for the magnetic shape memory effect. Arch Mech 63:549
Schneider D, Schmid S, Selzer M, Böhlke T, Nestler B (2014) Small strain elasto-plastic multiphase-field model. Comput Mech 55(1):27–35
Schneider D, Selzer M, Bette J, Rementeria I, Vondrous A, Hoffmann MJ, Nestler B (2014) Phase-field modeling of diffusion coupled crack propagation processes. Adv Eng Mater 16(2):142–146
Steinbach I, Apel M (2006) Multi phase field model for solid state transformation with elastic strain. Physica D 217:153
Apel M, Benke S, Steinbach I (2009) Virtual dilatometer curves and effective youngs modulus of a 3D multiphase structure calculated by the phase-field method. Comput Mater Sci 45(3):589
Silhavy M (1997) The mechanics and thermodynamics of continuous media, 1997th edn. Springer, Berlin
Kim SG, Kim WT, Suzuki T (1999) Phase-field model for binary alloys. Phys Rev E 60(6 Pt B):7186
Plapp M (2011) Unified derivation of phase-field models for alloy solidification from a grand-potential functional. Phys Rev E 84(3):031601
Choudhury A, Nestler B (2012) Grand Potential formulation for multi-component phase transformations combined with thin-interface asymptotics of the double obstacle potential. Phys Rev E Stat Nonlinear Soft Matter Phys, pp 1–36
Nestler B, Garcke H, Stinner B (2005) Multicomponent alloy solidification: phase-field modeling and simulations. Phys Rev E 71(4):1
Slawinski MA (2010) Waves and rays in elastic continua, 2nd edn. World Scientific Pub Co, London
Gross D, Seelig T (2011) Bruchmechanik: Mit einer Einführung in die Mikromechanik. Springer, Berlin
Mai AK, Singh SJ (1991) Deformation of elastic solids. Prentice Hall, Englewood Cliffs
Cha PR, Yeon DH, Yoon JK (2001) A phase field model for isothermal solidification of multicomponent alloys. Acta Mater 49(16):3295–3307
Voorhees PW, Johnson WC (1986) Interfacial equilibrium during a first-order phase transformation in solids. J Chem Phys 84(9):5108
Johnson WC (1987) Precipitate shape evolution under applied stress thermodynamics and kinetics. Metall Trans A 18(2):233–247
Simo J, Hughes T (1998) Computational inelasticity. Springer, New York
Acknowledgments
We thank the DFG for funding our investigations in the framework of the Research Training Group 1483. The work was further supported by the state Baden-Wuerttemberg and European Fonds for regional development with a center of excellence in Computational Materials Science and Engineering and by Helmholtz Portfolio topic “Materials Science for Energy and its Applications in Thin Film Photovoltaics and in Energy Efficiency”.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix
1.1 Transformation of stresses and strains in Voigt notation
In the Voigt notation, the strains and stresses can be written as
Then, the transformation (10) becomes \(\varvec{\sigma }^v_B=\varvec{M}^v_\sigma \varvec{\sigma }^v\), with the transformation matrix
An analogue transformation for the strain can be written as \(\varvec{\epsilon }^v_B=\varvec{M}^v_\epsilon \varvec{\epsilon }^v\), with the transformation matrix
We reorder the components of the strain and stress vectors and define
Due to this reformulation, we permute the rows of the previous matrices \(\varvec{M}^v_\sigma \) and \(\varvec{M}^v_\epsilon \), but the named properties remain
This follow the transformations of stresses and strains as used in Eqs. (20) and (21).
Driving force contributions of VT and RS model
The main assumption of the VT scheme [1] is that the strains of overlapping phases are equal. In a two phase system with \(\phi _{\alpha }\) and \(\phi _{\beta }\), the corresponding volume fractions follow Eq. (1) for the stress \(\varvec{\sigma }^{VT}\). The energy density results accordingly to [9–11]
Using Eq. (4), the corresponding contribution of the driving force for the VT model is given by
The assumption of the RS model is that the stresses are equal for the two overlapping phases. The system variables are now changed from strains to stresses. The corresponding elastic potential of phase \(\alpha \) for such a system can be derived by changing the system variable in Eq. (87) with the Legendre transformation to the form
This results in
with \(\varvec{\sigma }^{RS}\) given in Eq. (2). The corresponding contribution of the driving force for the RS model can be expresses as
Rights and permissions
About this article

Cite this article
Schneider, D., Tschukin, O., Choudhury, A. et al. Phase-field elasticity model based on mechanical jump conditions. Comput Mech 55, 887–901 (2015). https://doi.org/10.1007/s00466-015-1141-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00466-015-1141-6