
Abstract
Background
Endoluminal therapeutic procedures such as endoscopic submucosal dissection are increasingly attractive given the shift in surgical paradigm towards minimally invasive surgery. This novel three-channel articulated robot was developed to overcome the limitations of the flexible endoscope which poses a number of challenges to endoluminal surgery. The device enables enhanced movement in a restricted workspace, with improved range of motion and with the accuracy required for endoluminal surgery.
Objective
To evaluate a novel flexible robot for therapeutic endoluminal surgery.
Design
Bench-top studies.
Setting
Research laboratory.
Intervention
Targeting and navigation tasks of the robot were performed to explore the range of motion and retroflexion capabilities. Complex endoluminal tasks such as endoscopic mucosal resection were also simulated.
Main outcome measurements
Successful completion, accuracy and time to perform the bench-top tasks were the main outcome measures.
Results
The robot ranges of movement, retroflexion and navigation capabilities were demonstrated. The device showed significantly greater accuracy of targeting in a retroflexed position compared to a conventional endoscope.
Limitations
Bench-top study and small study sample.
Conclusions
We were able to demonstrate a number of simulated endoscopy tasks such as navigation, targeting, snaring and retroflexion. The improved accuracy of targeting whilst in a difficult configuration is extremely promising and may facilitate endoluminal surgery which has been notoriously challenging with a conventional endoscope.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Endoluminal therapeutic procedures are increasingly attractive given the shift in surgical paradigm towards minimally invasive surgery. There has been a stepwise evolution in surgical technology; initially, there was open surgery which after a century progressed to laparoscopic surgery in the 1990s. Since then, the pace of change has accelerated with the introduction of hybrid endoscopic–laparoscopic surgery which, in itself, is already being supplanted by endoluminal and transluminal surgery. This has pushed forward the field of gastroenterology with the flexible endoscope at the forefront of this increasingly specialised field.
The development of techniques such as endoscopic submucosal dissection has improved curative resection rates and lowered recurrence rates of early gastrointestinal cancers compared to piecemeal resection [1–4]. However, these are complex procedures made particularly difficult by the endoscope design [5–7]. Furthermore, in awkward areas such as the cardia and fundus, maintaining stability of the device whilst precisely resecting a lesion is extremely difficult, time consuming and mentally and physically demanding [8].
Despite developments in the field, there have only been relatively minor alterations to the basic design and function of the flexible endoscope. There are a number of emerging flexible platforms (most of which are not commercially available) which show great promise. These include the Anubiscope® (Storz) [9], EndoSAMURAI™ (Olympus) [10, 11] and the Direct Drive Endoscopic System (Boston Scientific) [12]. Whilst preliminary results are encouraging, there are still challenges in terms of stability, distal force transmission and tissue handling which require modifications to these devices.
The goal of this study was to evaluate a novel flexible snake robot to perform navigation, targeting and complex tasks which would be required for endoluminal surgery. We hypothesize that this snake robot improves targeting accuracy in both a retroflexed and neutral configuration compared with conventional endoscope.
Methods
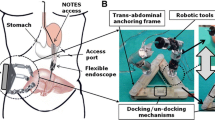
The system consists of an flexible snake robot with articulated distal section, delivery shaft and motor housing unit and seven degrees of freedom (DoF) lightweight robot 4+ (KUKA Roboter GmbH) holding the robot. The articulated section is 13 mm in diameter and 155 mm long with two articulated links comprising the head of the robot and a flexible driven section creating the neck (Fig. 1) [13]. The head is driven by 4 mm embedded micro-motors and can move in perpendicular planes, 90° horizontally and 45° vertically in a total of three DoF. The 95-mm-long flexible neck is driven by two pairs of antagonistic tendons that are controlled using motors located in the motor housing unit at the back of the robot. They allow movement in two DOF and can be retroflexed at a tight radius of <40 mm. The robot also has 3- and 2.5-mm working channels for passing interchangeable endoscopic tools and a 2.4 mm optical light fibre source for visualisation. A 2.8-mm video camera with 160,000 pixels is also housed within the device.

Flexible snake robot A without and B with sheath and probe emerging from distal tip C Range of motion of the robot with greater retroflexion capabilities demonstrated compared to a flexible endoscope D Robotic system set-up with master computer to the far left (black outlined white arrow), Omega 7 controller (solid black arrow) and KUKA robot (black outlined arrow) attached to snake robot (solid white arrow) with on-board camera view shown (note the surgical covers which hid the robot during the tasks were lowered to show the task set-up)
The control interface is the Omega 7 haptic device (Force Dimension) connected to the master computer. The master computer controls the KUKA robot providing linear motion and rotation of the flexible robot and sends commands to the slave computer of the flexible snake robot to control the remaining degrees of freedom.
Bench-top studies
The robot was evaluated in a series of bench-top tests based on endoscopic manoeuvres aiming to demonstrate its range of movement, dexterity and therapeutic feasibility. Two of the tasks were repeated with a flexible endoscope (GIF XQ-240, Olympus), to compare the two devices. During all robotic experiments, only the on-board camera was used and the experiment set-up was hidden from the participant’s visual field.
Navigation
To assess the range of motion and targeting accuracy in a neutral position, a navigation course was created (Fig. 2). Five subjects navigated the robot with a magnetic tracking probe device (Aurora® by NDI) inserted through the working channels of the endoscope through the course. They were asked to touch the probe tip to each white target peg (or as close as they could get to the peg) for 5 s. Whilst navigating through the course, the delivery shaft was kept in line with the purple starter peg space and the task finished with the distal tip being navigated through the finishing purple pegs. They were timed, and the accuracy of navigation at each white target peg was analysed using the tracker probe. A 5-s penalty was added if they moved the robot outside of the starter purple pegs.

A Navigation path B flexible robot (without sheath) and Aurora probe visible C KUKA LWR supporting robot and on-board camera with white distal tip of Aurora probe visible at the bottom centre of the screen (arrow)
The task was repeated using an endoscope, as before they were asked to keep the shaft within the space created by the purple starter pegs.
Retroflexion targeting
To assess the range of motion and accuracy of targeting, we used the robot to navigate through a simulated gastro-oesophageal junction (GOJ), retroflex and touch the tip of the tracking probe (inserted down the main working channel of the device and exited it 1 cm from the distal tip as shown in Fig. 1B) as close to the centre of eight targets placed around the opening as possible (Fig. 3) [13]. The points were placed around the opening to represent target points in the cardia and fundus which may be awkward to perform endoluminal surgery in.

Emergence of the robot with the tracking probe through the simulated GOJ and with the targets shown
Snare task
We used a robotic hood pod (Chamberlain group) to demonstrate the therapeutic potential of the device for endoscopic mucosal resection. We placed a 15-mm snare into the working channel of the robot and navigated the robot to snare the spikes in a certain order (spike numbers 6, 1, 3 and 10) (Fig. 4). The task was deemed complete when the snare closed around the point and an observer looking at both the on-board camera images and the experimental set-up agreed this had been adequately placed around the point.

Snare task with robotic hook pod and emergence of robot from the GOJ
Results
Controlled navigation was achieved by all five participants without any added time penalties. The operators were able to accurately target all pegs on the navigation course with similar accuracy for both devices (mean standard deviation was 4.86 and 4.55 mm for the endoscope and robot, respectively) (Fig. 5). Times to complete the task for the flexible endoscope ranged from 2 min 14 s to 4 min 59 s (median 3 min 24 s) and between 2 min 18 s and 8 min 35 s for the robot (median 3 min 56 s). There also appeared to be a learning curve with speed and efficiency improving between points.

A Endoscope navigation trajectories B robot navigation trajectories. Outlier point which was not reached by the endoscope to target 4
The snare and targeting in retroflexion tasks were also successfully completed (Fig. 6). Targeting using the robot was significantly different between the endoscope and robot (Mann–Whitney test, U = 7, z = 2.91, p < 0.05; Table 1). The overall median accuracy error using the endoscope was 4.03 mm compared to 2.43 mm with the robot, and interestingly, the robot targeted the points more accurately in all planes. The median accuracy errors for the superior, inferior and lateral points were 3.30, 4.03 and 4.02 mm for the endoscope and 2.55, 2.43 and 2.36 mm for the robot. All targets in retroflexion were accurately reached with the robot; however, target 4 which simulated the outer cardia was not reached with the flexible endoscope.

Targeting accuracy results for endoscope and robot in retroflexion including the outlier point which was not reached by the endoscope
Discussion
Since the introduction of robotics, there has been a keen interest and desire to integrate into clinical practice. This has lead to the development of a number of flexible robotic devices designed for surgery in difficult to reach anatomical areas including the cardioARM robotic system (Medrobotics) [14, 15] and Flex™ Robotic system (Medrobotics), robotic-assisted platforms for cardiac surgery and single-site access oropharyngeal surgery [16].
A number of robots have also been designed for use in gastroenterology. The Endotics™ system (Era Endoscopy s.r.l.) comprises of a disposable worm-like probe which moves in a semi-automatic inchworm motion designed to reduce forces applied to the colon wall during insertion [17]. The Neoguide (Intuitive Surgical Inc) is a novel computer-assisted colonoscope which provides real-time three-dimensional mapping of the leading segment of the colonoscope [18]. Improvements to the basic design of these devices would make these extremely promising platforms for diagnostic gastroenterology.
Minimally invasive techniques such as ESD have inspired the development of a number of robotic gastrointestinal devices for interventional procedures. Phee’s group has developed the MASTER and EndoMaster master–slave robots with robotic arms mounted on the distal tip of an endoscope and controlled by a joystick [19]. The master–slave system (IRCAD) is a teleoperated robot with two flexible motorised cable-driven arms through which instruments can be inserted and operated [20]. However, current robots are characterised by technical limitations affecting their performance and large-scale application. The devices are often adaptations of a flexible endoscope or robotic end effectors mounted to the distal tip rather than a novel design.
The flexible snake robot presented in this paper offers a controlled, stable and precise platform for endoscopic therapy. The robot has shown superior targeting accuracy over the flexible endoscope in a retroflexed configuration and equal navigation and targeting accuracy in a neutral position. This intuitive master–slave robot promises to overcome the limitations presented by the flexible endoscope, increasing the uptake of endoluminal surgery by improving surgical precision, and reducing operating time, complications and post-operative discomfort. The studies described in this paper have two main limitations. First, there are a limited number of study participants, and second that these are bench-top tests. Laboratory-based tests should always be performed prior to animal studies in order to overcome any major design challenges of a novel device. These bench-top studies show promising results supporting the role of the robot in endoluminal surgery. Given that the initial phase of device development and therapeutic potential has been successfully established, further ex vivo and in vivo studies with a greater number of study participants are now required to optimise the robotic device design aiming towards a bimanual platform and to compare against existing platforms.
Abbreviations
- ESD:
-
Endoscopic submucosal dissection
- GOJ:
-
Gastro-oesophageal junction
- DoF:
-
Degrees of freedom
References
Saito Y, Fukuzawa M, Matsuda T, Fukunaga S et al (2010) Clinical outcome of endoscopic submucosal dissection versus endoscopic mucosal resection of large colorectal tumors as determined by curative resection. Surg Endosc 24:343–352
Cao Y, Liao C, Tan A, Gao Y et al (2009) Meta-analysis of endoscopic submucosal dissection versus endoscopic mucosal resection for tumors of the gastrointestinal tract. Endoscopy 41:751–757
Oka S, Tanaka S, Kaneko I, Mouri R et al (2006) Advantage of endoscopic submucosal dissection compared with EMR for early gastric cancer. Gastrointest Endosc 64:877–883
Chiu P, Teoh A, To K, Wong S et al (2012) Endoscopic submucosal dissection (ESD) compared with gastrectomy for treatment of early gastric neoplasia: a retrospective cohort study. Surg Endosc 26:3584–3591
Saito Y, Uraoka T, Matsuda T, Emura F et al (2007) Endoscopic treatment of large superficial colorectal tumors: a case series of 200 endoscopic submucosal dissections (with video). Gastrointest Endosc 66:966–973
Fujishiro M, Yahagi N, Kakushima N, Kodashima S et al (2007) Outcomes of endoscopic submucosal dissection for colorectal epithelial neoplasms in 200 consecutive cases. Clin Gastroenterol Hepatol 5:678–683
Sakamoto N, Osada T, Shibuya T, Beppu K et al (2009) Endoscopic submucosal dissection of large colorectal tumors by using a novel spring-action S-O clip for traction (with video). Gastrointest Endosc 69:1370–1374
Kato M, Gromski M, Jung Y, Chuttani R et al (2013) The learning curve for endoscopic submucosal dissection in an established experimental setting. Surg Endosc 27:154–161
Dallemagne B, Marescaux J (2010) The ANUBIS project. Minim Invasive Ther Allied Technol 19(5):257–261
Spaun GO, Zheng B, Swanström LL (2009) A multitasking platform for natural orifice translumenal endoscopic surgery (NOTES): a benchtop comparison of a new device for flexible endoscopic surgery and a standard dual-channel endoscope. Surg Endosc 23(12):2720–2727
Fuchs KH, Breithaupt W (2012) Transgastric small bowel resection with the new multitasking platform EndoSamurai™ for natural orifice transluminal endoscopic surgery. Surg Endosc 26(8):2281–2287
Thompson CC, Ryou M, Soper NJ et al (2009) Evaluation of a manually driven, multitasking platform for complex endoluminal and natural orifice translumenal endoscopic surgery applications (with video). Gastrointest Endosc 70(1):121
Seneci CA, Shang J, Leibrandt K, Vitiello V, Patel N, Darzi A, Teare J, Yang GZ (2014) Design and evaluation of a novel flexible robot for transluminal and endoluminal surgery, IEEE (Accessed June 2014, in press)
Ota T, Degani A, Schwartzman D, Zubiate B et al (2009) A highly articulated robotic surgical system for minimally invasive surgery. Ann Thorac Surg 87(4):1253–1256
Neuzil P, Cerny S, Kralovec S, Svanidze O et al (2013) Single-site access robot-assisted epicardial mapping with a snake robot: preparation and first clinical experience. J Robot Surg 7(2):103–111
Johnson PJ, Serrano CM, Castro M, Kuenzler R et al (2013) Demonstration of transoral surgery in cadaveric specimens with the medrobotics flex system. Laryngoscope 123(5):1168–1172
Cosentino F, Tumino E, Passoni GR, Morandi E et al (2009) Functional evaluation of the endotics system, a new disposable self-propelled robotic colonoscope: in vitro tests and clinical trial. Int J Artif Organs 32:517–527
Eickhoff A, van Dam J, Jakobs R, Kudis V et al (2007) Computer-assisted colonoscopy (the NeoGuide Endoscopy System): results of the first human clinical trial (“PACE study”). Am J Gastroenterol 102:261–266
Phee SJ, Low SC, Sun ZL, Ho KY, Huang WM, Thant ZM (2008) Robotic system for no-scar gastrointestinal surgery. Int J Med Robot 4(1):15–22. doi:10.1002/rcs.179
Madhanir AJ, Niemeyer G, Salisbury Kenneth Jr (1998) The black falcon: a teleoperated surgical instrument for minimally invasive surgery. Proc 1998 IEEE/RSJ Int Conf Intell Robots Syst 48:936–944
Acknowledgments
This project was funded by a Wellcome Trust grant (P13145).
Disclosures
Dr Nisha Patel, Mr Carlo A Seneci, Dr Jianzhong Shang, Konrad Leibrandt, Professor Guang-Zhong Yang, Professor Lord Ara Darzi of Denham and Professor Julian Teare have no conflicts of interest or financial ties to disclose.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Patel, N., Seneci, C.A., Shang, J. et al. Evaluation of a novel flexible snake robot for endoluminal surgery. Surg Endosc 29, 3349–3355 (2015). https://doi.org/10.1007/s00464-015-4088-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-015-4088-y