Abstract
Despite being a major selective force, predation can induce puzzling variability in anti-predator responses—from lack of predator aversion to lifelong predator-induced fear. This variability is hypothesised to result from variation in the trade-offs associated with avoiding predators. But critical information on fitness outcomes of these trade-offs associated with anti-predator behaviours is lacking. We tested this trade-off hypothesis in Aedes aegypti, by examining oviposition site selection decisions in response towards larval predation risk and comprehensively measuring the fitness implications of trade-offs of avoiding larval predators, using three fitness measures: larval survival, development time and size. In a field study, we find that adult females show a surprisingly variable response to predators, ranging from attraction to avoidance. This variation is explained by fitness outcomes of oviposition along a predation-risk gradient that we measured in the laboratory. We show that ovipositing females could gain fitness benefits from ovipositing in pools with a low density of predators, rather than in predator-free pools, as predators provide a release from negative density effects of conspecific larvae that might co-occur in a pool. Interacting selection pressures may thus explain diverse prey responses. We suggest other systems in which similarly unexpected prey behaviour is likely to occur.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Predation risk is widely known to affect multiple aspects of a prey animal’s behaviour and life history. For decades, research in ecology has focused on measuring the consequences of lethal and non-lethal effects of predation on prey trait evolution (Lima 1998; Preisser et al. 2005; Katz et al. 2016) and the role of predators in structuring ecosystems (Okasanen et al. 1981; Paine 2010; Winnie and Creel 2017). Given how strongly predation is thought to affect prey fitness, animals within a population show surprising variability in anti-predator responses, from being extremely wary to an unexpected lack of aversion towards predators. This large variation in prey responses towards predators occurs across a wide suite of prey behaviours, e.g., escape responses in lizards: flight initiation distance (Cooper 2006); foraging decisions in rodents: time spent in risky habitat (Brown 1999), reproduction related decisions in mosquitoes: degree of avoidance of risky oviposition sites (Vonesh and Blaustein 2010). The maintenance of such variation in prey responses within a population to a seemingly strong selective pressure is intriguing.
One possible reason for this variability in anti-predator response is variation in the trade-offs associated with avoiding predators in the environment (reviewed in Verdolin 2006; Preisser and Bolnick 2008; Preisser et al. 2009). Any factor generating variation in either the costs or benefits associated with anti-predator behaviour could result in variation in pay-offs and therefore, variation in behavioural responses. For example, a central idea in explaining variable prey behaviour within a population is that trade-offs vary when animals encounter predation risk that varies in space and time; animals might tailor their anti-predator behaviour to the resulting variation in pay-offs in a risk-sensitive manner (Dupuch et al. 2009; Laundre et al. 2010; Juliana et al. 2011; reviewed in Verdolin 2006; Hebblewhite and Merrill 2009). Internal factors, such as body condition, could also result in variation among individuals in pay-offs associated with anti-predator behaviours; correspondingly, individuals closer to starvation are likely to show weaker anti-predator behaviour by, for example, reducing their avoidance of high-risk foraging areas (Dill and Fraser 1984; Sih 1992). Such an explanation, of varying trade-offs arising from variation in either ecological or internal factors, has been invoked to explain variation in different prey behaviours (e.g., sex differences in habitat selection related to sex differences in food/safety trade-offs, Creel et al. 2005; temporal differences in the use of productive foraging areas related to temporal differences in predation risk, Heithaus and Dill 2006; reviewed in Verdolin 2006; Hebblewhite and Merrill 2009).
Although this explanation of varying trade-offs has been invoked in the literature (Verdolin 2006; Hebblewhite and Merrill 2009; Preisser et al. 2009), so far this is largely theoretical. In other words, although animals often appear to behave as though they are balancing the proposed trade-offs, we lack actual comprehensive measurements of the hypothesised underlying fitness outcomes, which are typically assumed or postulated but not estimated. However, measuring fitness consequences is critical if we are to better understand how selection is working, better predict prey behaviour under a given context, and better explain why prey behave differently under different conditions. The lack of these measurements is partly because fitness consequences of trade-offs (e.g., predation rates, and growth changes due to changes in prey activity in the presence of predators) are difficult to quantify (Hill and Dunbar 1998; Creel and Christianson 2008). Even when measured, they are rarely measured along a gradient of predation risk (but see Belovsky et al. 2011). Additionally, these trade-offs usually manifest in different fitness currencies, for example, the direct and indirect effects of predators could be in different currencies (such as, mortality and reduced growth); integrating them into a single fitness measure can be challenging yet crucial (Livdahl and Sugihara 1984). Furthermore, these trade-offs may vary non-linearly along a predator density gradient; consequently, animals might show a non-linear response towards predator density. To test whether variable anti-predator behaviour can result from changing trade-offs associated with variation in predation risk, we focused on oviposition site selection (OSS) decisions in the mosquito, Aedes aegypti, and measured adult behaviour and how it is influenced by predation-related trade-offs along a risk gradient.
Animals that oviposit in discrete patches, such as Ae. aegypti, can strongly influence their offspring fitness through their choice of patch, because offspring are typically restricted to their natal patch till they develop into adults (Blaustein 1999; Relyea 2001; Angelon and Petranka 2002). In these natal patches, larval predation risk is considered to be a dominant risk factor for offspring of many anurans and dipterans (Fincke et al. 1997; Silberbush and Blaustein 2011). Females of many patch-breeding animals are known to avoid laying eggs in pools that have predators of offspring (frogs: Murphy 2003; Rieger et al. 2004; mosquitoes: Angelon and Petranka 2002; Spencer et al. 2002; Eitam and Blaustein 2004; Vonesh and Blaustein 2010). However, females may also face fitness costs from avoiding pools with predators. A primary trade-off associated with avoiding larval predators is high competition between larvae as larvae experience high conspecific density in predator-free pools. Both wild and laboratory studies have shown that high conspecific densities reduce larval survival and adult body size and increase development time (Agnew et al. 2002; Walsh et al. 2011). In our study, we, therefore, focused on two important selection pressures—larval predation risk, the dominant risk factor in mosquito breeding habitats, and larval competition. The main trade-off we examined for adult ovipositing females was avoiding larval predation risk trading off against avoiding larval competition.
In our study, we asked if trade-offs varying along a gradient in larval predation risk can explain variable adult anti-predator behaviour in Ae. aegypti. Ae. aegypti is a day-biting mosquito and females typically oviposit after dusk and before dawn. For locating oviposition sites, females use long-range visual cues, and for discriminating between sites, they appear to use short-range gustatory and olfactory cues, such as volatile compounds and chemicals in the pool water (Clements 1999; Sparks et al. 2014). Ae. aegypti females typically deposit eggs on the edges of water-filled containers, tyres, mud pots, rock pools and tree-holes. The larvae, feeding on organic and particulate matter, complete their maturation in these pools and eclose into adults (Clements 1992, 1999). The offspring face a high risk of predation in these closed pools from predatory dragonfly nymphs and backswimmers (Fincke et al. 1997; Silberbush and Blaustein 2011). In addition, the oviposition biology of Aedes spp. is peculiar because eggs (laid above the water surface) hatch post rainfall; multiple females lay eggs in the same pool, hence eggs accumulate in large numbers over a period of few days and result in high densities of larvae when these eggs hatch post rainfall (Chadee and Corbet 1990). Due to these life history characteristics, Ae. aegypti females typically encounter very high densities of larvae in potential oviposition sites in the wild for the majority of the breeding season (Harrington et al. 2008). Thus, larval predation risk and larval competition are likely to be important selection pressures acting on female oviposition site selection in the study species.
Therefore, we first measured the fitness consequences to females from laying eggs in pools along a gradient in larval predation risk and fitness consequences of ovipositing in predator-free pools, where they are faced with the competing selection pressure of larval competition. Secondly, we examined female oviposition site selection response along a gradient in larval predation risk under natural conditions. We comprehensively measured predation-related trade-offs in the laboratory by measuring multiple components of adult female fitness. We measured larval survival and development time, and adult body size of survivors, and integrated them into a single long-term fitness measure, i.e., grandoffspring production rate for ovipositing adult females. We predicted that adult females should avoid ovipositing in pools with larval predators as larval predation is thought to be the dominant risk factor; furthermore, the degree of avoidance should increase along the risk gradient. Female oviposition behaviour is expected to match larval performance. Thus, we expected that the strength of adult female avoidance of larval predators along a predation gradient would relate to the shape of the estimated fitness consequences, that is, females would strongly avoid ovipositing in pools that entail large costs of larval predation.
Methods and materials
Measuring fitness trade-offs associated with OSS decisions
To understand the evolution of female oviposition site selection, we first measured the range of possible fitness consequences of ovipositing in habitats that varied in larval predation risk. We followed this experiment with a second experiment to measure adult oviposition in habitats that varied in predation risk. To first quantify predation-related fitness trade-offs, we conducted a laboratory study using artificial pools that varied along a gradient in predator density. We artificially deposited larvae in these pools, thus mimicking decisions made by females, and measured the number of surviving larvae as well as their reproductive value, i.e., contribution to the future gene pool. We varied the number of deposited larvae to reflect a primary trade-off to avoiding predation, namely larval competition in predator-free pools. To capture the fitness consequences for females, we measured larval performance using three fitness measures: larval survival, development time and adult body size of surviving larvae.
We conducted laboratory experiments from November 2013 to February 2015, with individuals from a colony of Ae. aegypti mosquito, maintained in our laboratory at the Indian Institute of Science campus, Bangalore. The colony is maintained at a 14:10 h day and night cycle, at 27 ± 5 °C. The colony was set up in February 2013, with an initial batch of eggs procured from the National Malaria Research Institute. To quantify larval performance under different intensities of predation risk and conspecific competition, we established artificial pools of 30 cm diameter and 6 cm depth in the laboratory that were representative of container size in which Ae. aegypti typically lay eggs (Harrington et al. 2008). We used nymphs of the granite ghost dragonfly (Bradinopyga geminata) as predators for the experiment; these were collected from overhead tanks at the institute. Dragonfly nymphs commonly occur in the rock pools and cattle tanks that Ae. aegypti use for oviposition and are voracious predators of larvae (Fincke et al. 1997; personal observations, Chadee and Ward 1998; Alencar et al. 2016). We used similar sized predators (8–11 mm) for all trials. We used four levels of predator density: 0, 1, 2 and 4 to represent a naturally occurring gradient in predator density in rock pools (unpublished data) and had six levels of offspring (larval) densities: 20, 30, 45, 70, 100, 155 for each predator density level, resulting in 24 combinations in a factorial design framework. We chose the larval density range using a combinational approach. We used data from the literature (Southwood et al. 1972; Chadee and Corbet 1990; Wong et al. 2011) and from preliminary trials to select a wide range of larval densities that are likely to occur naturally. The preliminary trials examined larval densities arising from wild females ovipositing in artificial containers that were placed in our institute campus to arrive at a representative range of larval densities (See Online Resource 2). For the experiment, each pool was filled with 1.5 l of distilled water and 0.2 g of larval food (dried and powdered fish food) was added. We placed an equal number of similar sized refuge sites (pebbles) in each pool. We added freshly hatched first instar larvae from the colony to each pool and allowed them to acclimatise for 5 h before adding the predators. We ran three replicates of this experiment, resulting in 72 artificial pools in which we used 5040 first instar larvae, of which 474 males and 556 females survived.
Each trial started with the addition of larvae and terminated when either all larvae had pupated or were dead for all 24 pools. For every pool, we measured three fitness components. To estimate larval survival, we counted the number of larvae that matured to pupal stage. We measured development time (the time taken by larvae to pupate) by surveying each pool every 5 h for larvae that had matured to pupae. We collected the surviving pupae in individual vials and chloroformed the eclosed adults. These adults were sexed and then dissected for wing length measurements as wing length is a reliable proxy for estimating size in this species (Briegel 1990; Armbruster and Hutchinson 2002).
Measuring adult female behaviour
To study adult oviposition behaviour, we tested female response to varying larval predator densities. We conducted simultaneous-choice trials in an artificial pool experiment at two outdoor locations at our field site located in the campus of Rishi Valley School, Madanapalle, India (13.63 N, 78.45 E). At our field site, we conducted 90 binary pool trials from July to November in 2014 and 2015 at two outdoor locations. A trial consisted of a treatment pool (representing one of three levels of predator density, i.e., containing either 2, 4 or 6 predators) paired with a control pool, free of predators: 0–2, 0–4 and 0–6. For all trials, we used artificial plastic tubs of the same surface area, depth, shape and colour as container attributes are known to affect female oviposition behaviour (Clements 1999; Harrington et al. 2008). To replicate treatment conditions from the laboratory experiment pools described in “Introduction”, we added 1.5 l of tap water and 0.2 g of larval food to each tub. We placed two filter paper ovistrips of 40 cm length and 7.5 cm width along the walls of each pool for collecting eggs. During a trial, the pools were set up outdoors at 1600 h and kept exposed to wild population of females for 15 h as oviposition activity of Ae. aegypti peaks after dusk and before dawn (Clements 1999). The ovistrips were removed, dried and eggs were counted with a dissecting microscope. Before every trial, we cleaned, dried and treated the pools with 70% ethanol solution to remove possible remaining cues from the previous trial. Each 15 h exposure period constituted a trial. The two pools in each binary choice trial were placed on cement benches of 1 m height and placed 2 m apart. The positions of control and predator pools were switched every trial to control for possible position-related biases. In both years, over the course of the season, we alternated the sequence of predator treatments used in the binary trials to minimise possible effects of temporal changes in the number of eggs laid by females. In total, we conducted 90 trials for adult females with 27, 29, and 34 trials each for p = 2, p = 4 and p = 6 treatment, respectively. From each location, a subset of 25 eggs was randomly chosen and allowed to hatch per trial and the larvae isolated for species identification. We only found eggs of Ae. aegypti in all our trial containers although we did find Aedes vexans in rock pools close to the field site. Note that we were unable to estimate how many different females laid eggs in a given control or treatment pool from the counts of eggs laid. We conducted the experiment over several nights, but only one replicate was conducted per night per location. Thus, the replicates of each control–predator pool treatment between nights were independent.
Statistical analysis
Measuring fitness trade-offs associated with OSS decisions
The first component measuring female fitness was larval survival (the probability of a larva surviving to pupation). We calculated the proportion of individuals that pupated successfully for each pool and ran a generalised linear model with quasi-binomial errors (to account for over-dispersion). We included predator density, initial larval density, replicate number and the interaction between predator and larval density as predictors. The interaction term was used because predation rate may depend on the interaction between predator and prey numbers. We included replicate number to account for possible effects associated with a replicate, such as batch of eggs or predators used.
For the second measure of larval performance, development time of survivors (time in hours from start of trial to pupation), we analysed males and females separately, since females develop at a different rate than males (Clements 1999; Tun-Lin et al. 2000). We could not examine development time as a function of the whole range of predator and larval density combinations tested, because there were too few survivors in some of these combinations (specifically, at high predator and low larval densities, number of larvae < 20), which resulted in limited measurements of development time for these combinations. Therefore, we focused on two simpler questions that allowed us to examine the influence of predator density on development time. We first asked what is the magnitude of the relationship between development time of survivors and predator density? For this analysis, we used data only from pools with high larval density, that is pools with 155 larvae combined with 0, 1, 2 or 4 predators. Thus, this analysis focused on characterising the strength of the relationship between predator density and development time at constant (high) larval density. We ran a linear mixed effects model using the lme4 package (Bates et al. 2015) with development time (in hours) as the response and predator density as the fixed effect and pool identity as a random effect. Secondly, to understand whether the influence of predation varied with larval density, we examined the effect of adding a single larval predator on the development time of survivors along a gradient in larval density. For this, we used data from treatments with predator density either 0 or 1 across all larval density treatments. We ran a linear mixed effects model with development time as the response variable, larval density as a continuous predictor and predator density as a two-level factor along with the interaction term. Pool identity was included as a random effect. We ran similar two-step analyses for the third fitness measure, the wing length of survivors, because, as in the case of development time, we could not examine wing length as a function of the whole range of predator and larval density combinations tested.
Integrating the three fitness components to estimate grandoffspring production rate (GOPR)
The long-term fitness of an individual can be captured by the number of offspring produced by that individual and the reproductive value (i.e., expected fecundity) of those offspring. Furthermore, maturation time also affects fitness, since shorter generation lengths contribute to higher fitness. The rate of production of grandoffspring is one measure that captures these different components, and can thus act as a measure of long-term fitness. Integrating multiple fitness measures into a single index is important because individual measures could show contrasting relationships with trait variation and could even cancel out when considered together (Livdahl and Sugihara 1984). We measured multiple fitness components of oviposition decisions, and combined them to estimate grandoffspring production rate (GOPR). This single measure provided us with a framework to compare the fitness consequences of oviposition decisions, that is, of laying eggs in pools with different levels of predator and competitor densities. GOPR for an ovipositing female is the probability that an egg that she lays survives to emerge as an adult, multiplied with the expected fecundity of the surviving offspring upon maturation, divided by maturation time. In other words, it is her expected number of grandoffspring per egg, accounting for generation time. To estimate GOPR, we used data from larval survival, development time and adult body size measured in our study, with body size used to estimate fecundity based on equations in the literature (Armbruster and Hutchinson 2002). GOPR for the ith offspring is calculated as:
where pi is the probability of survival (0 if the larva died or 1 if it survived to pupate) in a pool with a given predator and conspecific density. fi and di are the fecundity and development time, respectively, of the ith larva. We calculated the fecundity of the survivors from the size–fecundity relationship reported for Aedine mosquitoes: y = 0.16 + 4.22x, where y is fecundity and x is wing length (mm) on the log10-log10 scale. The R2 value for this model is 0.74 (Armbruster and Hutchinson 2002). GOPR was assigned a value of 0, by definition, for larvae that did not survive in a given pool. GOPR was calculated for every larva. We ran a linear mixed effects model with GOPR as the response variable, predator density, conspecific density and their interaction as predictors, and pool identity as the random effect.
Measuring adult female behaviour
To measure the oviposition response of females, we used three indices. First, we calculated “oviposition activity index” (OAI) (Kramer and Mulla 1979), expressed as \(\frac{{E_{T} \, - \,E_{C} \,}}{{E_{T} \, + \,E_{C} }}\), where ET and EC are the number of eggs laid in the treatment and control pools, respectively, in a given trial. The value of OAI, representing proportional differences in eggs laid between treatment and control pools, ranges from − 1 indicating maximum aversion to + 1 indicating maximum attraction to oviposit in the treatment pool. We ran a linear model with OAI as the response variable, and with predator density and location as predictors.
Second, we analysed the total number of eggs laid in both pools in a trial. Studies report that Ae. aegypti while skip-ovipositing (i.e., depositing eggs in more than 1 site) lay more eggs in suitable than in unsuitable sites (Colton et al. 2003). To understand the relationship between total eggs laid and larval predator density, we ran a generalised linear model with negative binomial errors with predator density and location as predictors. Third, we examined the propensity to reject both treatment and control pools. We measured the proportion of the total number of trials for each control–treatment combination in which the females did not lay eggs in either pool (i.e., rejected both pools). We examined how the propensity to reject both pools varied with predator density by simply examining the pattern in overlap of 95% bootstrapped confidence intervals of the mean of 1 category with means of other categories.
We used likelihood ratio tests to assess the statistical significance of model parameters. Where model assumptions of normality were not met, we used permutation tests with 10,000 iterations to evaluate statistical significance and calculated 95% bootstrapped confidence intervals for each parameter. We based our inferences on the full model and dropped only statistically insignificant interaction terms for ease of model interpretation. We carried out all analyses using the statistical software R (v.3.2.2) (R core team 2017).
Results
Measuring fitness trade-offs associated with OSS decisions
The probability of larval survival was affected by predator density but the nature of this effect depended on larval density (Fig. 1; GLM, interaction term coefficient = 0.014 (95% CI 0.008–0.021), χ2 = 336.95, df = 1, p < 0.001). When predators were absent, larval survival declined rapidly with increasing conspecific density (Fig. 1, P = 0); the mortality ranged from 24% at high to 0% in low larval density treatments (Fig. 1), indicating potentially strong competition for resources among larvae. In the presence of predators (P = 1, 2, and 4), the probability of larval survival was affected by predator density but the nature of this effect varied dramatically as a function of larval density. At low larval density, survival decreased rapidly with increasing predator density. In contrast, at high larval density, survival was similar or even improved at low predator density when compared with no predators. Probability of survival did not vary detectably across trials (χ2 = 47.249, df = 2, p = 0.147, see Table A1 in Online Resource 1).

Probability of survival at 4 different predator densities (4 panels, labelled 0–4) along increasing larval conspecific density (N = 72). In the absence of predators, survival decreased rapidly with larval density (P = 0). In the presence of predators (P = 1, 2, and 4), the probability of larval survival was affected by predator density but the nature of this effect depended on larval density. At low larval density, survival decreased rapidly with increasing predator density. At high larval density, survival was similar or even improved at low predator density when compared with no predators
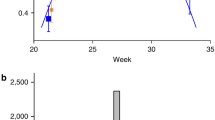
For the second (development time) and third (wing length) measurements of fitness we asked two questions: Firstly, what is the relationship between development time and wing length of survivors and increasing predator density? The linear mixed effects model results show that, at constant (high) larval density, increasing predator density from 0 to 4 reduced the development time of female survivors by 28% (χ2 = 8.46, df = 1, p = 0.003) and of male survivors by 31% (χ2 = 7.35, df = 1, p = 0.006) (Fig. 2a). For wing length, at high larval densities, female survivor wing length increased by 12.75% as predator density increased from 0 to 4 predators (χ2 = 3.86, df = 1, p = 0.04). For males, however, there was no detectable effect of predator density on wing length (χ2 = 2.94, df = 1, p = 0.086). Secondly, what is the effect of a single predator on development time and wing length of survivors at different larval densities? In the absence of a single predator, female development time increased with increasing conspecific densities (χ2 = 8.13, df = 1, p = 0.004), again indicating competition among larvae for resources. The presence of a single predator decreased development time (χ2 = 7.32, df = 1, p = 0.006) similarly across different conspecific densities (interaction term, χ2 = 1.72, df = 1, p = 0.19) (Fig. 2a). For males, development time increased with increasing conspecific densities, and decreased in the presence of a predator. In addition, this decrease was slightly smaller at higher conspecific densities (interaction term, χ2 = 3.98, df = 1, p = 0.04). For wing length, female wing lengths decreased with increasing conspecific density in the absence of predators (χ2 = 17.94, df = 1, p < 0.001). In the presence of a single predator, wing length increased (χ2 = 9.48, df = 1, p = 0.002), but similarly across conspecific densities (interaction term, χ2 = 2.88, df = 1, p = 0.089, Fig. 2b). For males, conspecific density had a negative effect on wing length of survivors (χ2 = 18.41, df = 1, p < 0.001), but predator presence had no effect (χ2 = 1.92, df = 1, p = 0.2) (Fig. 2b) (Tables A2 and A3 in Online Resource 1).

a Development time (hours) at different predator densities along increasing conspecific density (N = 1030). b Wing length (mm) at different predator densities along increasing conspecific density (N = 1030). Survivors from predator pools had shorter development time and larger wing length. Error bars represent 95% bootstrapped CIs
Combining the three fitness components into GOPR (grandoffspring production rate) revealed that both predators and conspecifics acted jointly and in a complex fashion on GOPR, with positive effects at certain points and negative effects at other points along their gradients (interaction term, χ2 = 36.85, df = 2, p < 0.001, see Fig. 1b and Table 1B in Online Resource 2). At relatively low conspecific densities, GOPR was highest in the absence of predators and decreased as predator density increased (Fig. 3). In contrast, at high conspecific densities, the shape of this relationship changed: GOPR showed a hump-shaped relationship along the predator gradient from 0 to 4 predators with a peak at low predator densities. That is, at high densities of conspecifics, such as 155 larvae, GOPR was higher in the presence of low numbers of predators than in the absence of predators. In the absence of predators, GOPR decreased drastically with an increase in conspecific density (Fig. 3).

Effect of predator density on estimated grandoffspring production rate (GOPR)—an integrated measure of female fitness for different levels of conspecific density. At low larval conspecific density (20–70), GOPR was highest in the absence of predators and declined with increasing predator density. The magnitude of this effect decreased with increasing conspecific density. At the highest conspecific density, GOPR was maximum at low (1 and 2) predator densities suggesting that predators provide a release from effects of conspecific competition. Error bars show 95% bootstrapped confidence intervals
Measuring adult female behaviour
We found that females did not reject predator pools completely. The oviposition activity index was found to vary from positive values—attraction to predator pools, to negative values—repulsion to predator pools, along the predator density gradient. Females rejected pools with high predator densities (bootstrapped 95% CI on mean OAI was consistently negative at predator density 6) and showed no consistent avoidance or preference at predator density 4 (Fig. 4a). Interestingly, at a low predator density of 2 predators, females showed a variable but substantially positive OAI, with the bootstrapped CI on mean OAI ranging from − 0.034 to 0.651 (predator term, F = 4.67, p = 0.014). Additionally, the counter-null (the effect size that is just as well supported by the data as the null hypothesis) was a very high positive value of 0.65 (note that OAI ranges from − 1 indicating maximum aversion to 1 indicating maximum attraction). In addition, we examined the balance of evidence in favour of (and against) the conclusion that OAI is positive. We do this through the approach of Gelman and Weakliem (2009) in assessing “Type S” error, which is the error of concluding that a parameter is positive when the true value is negative, or vice versa. The bootstrapped 95% confidence interval of OAI is − 0.034 to 0.65, with 96.15% of the distribution of bootstrapped values being positive. This means that, in concluding that the true value of OAI is positive, the probability of committing Type S error, is 0.0485, or 25:1. We infer from these results that females are positively attracted to predators at the 0–2 predator treatment. The location of the experiment did not have an effect on OAI (F = 0.428, p = 0.516, Table A4 in Online Resource 1).

a Oviposition activity index (OAI) at different predator treatments (N = 90). Adult female response was sensitive to larval predator density—females were attracted to pools with low predator density treatment (positive OAI) but at high predator density females showed aversion to predator pools (negative OAI). b Total eggs laid in both control and predator pool at different predator treatments—females laid fewer eggs in both control and predator pools at high predator density. c Adult propensity to reject both control and predator pool—female rejection increased substantially with predator density. Error bars represent 95% bootstrapped CIs
The second measure of female response was the total number of eggs laid in both control and predator pools. The number of eggs laid by females in a trial ranged from 2 to 122 eggs. Females laid 74% fewer eggs in high predator density (6 predators) trials when compared with low predator density (2 predators) trials (GLM, predator term, χ2 = 4.99, df = 2, p = 0.08) (Fig. 4b). Location did not have a detectable effect (χ2 = 0.0311, p = 0.847, Table A5 in Online Resource 1).
We also measured the females’ tendency to reject both control and predator pools as the predator density increased. Females were highly likely to reject both control and predator pools when exposed to high predator density treatments. Females were much less likely to do so at the low predator density treatment (note pattern of overlap of 95% bootstrapped CIs, Fig. 4c).
Discussion
By comprehensively measuring fitness consequences of laying eggs along a gradient in predation risk and predator-free pools in controlled conditions, and in parallel, measuring wild female oviposition responses along this gradient, we report that females show diverse responses to larval predators. We propose that this variation in oviposition responses can be explained by a non-linear pattern in trade-offs along the predation risk gradient. We find that females show a complex response, sensitive to the magnitude of larval predation risk, while selecting sites for oviposition. Unexpectedly, females did not show an aversion, but indeed seemed to be attracted to pools with a low density of predators. When predator density increased, this response shifted clearly towards avoidance: females were strongly repelled by high-density predator pool treatments, laying relatively more eggs in control pools than in predator pools. At the highest predator density treatment, females also substantially reduced the number of eggs laid and frequently completely rejected both pools available (predator and control). In our study, through laboratory and field experiments, we show that the diverse response of ovipositing females towards larval predators can be explained by carefully measuring fitness consequences of trade-offs along the larval predation-risk gradient.
Why do females show such variable responses towards larval predators—from aversion to attraction? Our laboratory experiment suggests that the answer lies in the nature of trade-offs along the predation-risk gradient. We found that at high larval densities, larval performance, hence adult fitness, is higher in pools with low numbers of predators, than in predator-free pools. This appears to result from strong competition among larvae in predator-free pools, resulting in reduced survival, slower development and smaller adult size at emergence that affects fecundity. Integrating these fitness components together we found that, when larval densities were high, grandoffspring production rate peaked at low predator densities and was depressed both at high predator densities and in predator-free pools. Field observations show that Ae. aegypti females typically encounter high larval densities for the majority of the season (Chadee and Corbet 1990; Harrington et al. 2008), and spread eggs across multiple sites. In these closed habitats, local conspecific competition is likely to be intense and mosquitoes face large unavoidable costs related to competition at the developmental larval stage. In addition, the oviposition biology of Aedes spp. is peculiar because eggs are laid on the walls of pools/containers above the water level and hatch immediately post rainfall. This can allow the accumulation of eggs from many different females, resulting in a mixed cohort of eggs when multiple females lay eggs in the same pool/container. Sharing a pool with a large number of unrelated individuals reduces the probability of an individual female’s offspring being depredated, due to a dilution effect. Hence, in a background of high conspecific competition, females could gain benefits of reduced offspring competition by ovipositing in pools with a low density of predators, while at the same time minimising costs of offspring predation mortality (due to a dilution effect from unrelated larvae). This might explain the preference of females for low density predator treatment pools over predator-free control pools. When predator densities are high, however, our results from examining the trade-off predict that females are better off avoiding high-density predator pools, even when conspecific larval densities are high. In accordance with these measured trade-offs, females showed strong avoidance of high-density predator pools. Our study, thus, provides rare evidence for variation in anti-predation responses among prey animals resulting from changes in fitness outcomes, when exposure to predation risk is traded off against exposure to competition along a predation-risk gradient.
An alternative explanation for attraction towards predators is that females are attracted to the microbes that are generated by killing of prey rather than to predator cues (Albeny-Simões et al. 2014). Our experimental results do not support this explanation as we find that females are attracted to predator presence in the absence of any killing of prey, and so are likely to be attracted to cues emanating from the predator. Additionally, we found an attraction response only when predators were present at low densities, suggesting a risk-sensitive response. Another possible explanation for the variable female behaviour we report, that females are unable to detect low predator densities and hence do not show an avoidance response, is also not supported by our findings. If this were so, females should show similar responses to control and low predator density predator pools, rather than the observed positive response to predator pools.
Much empirical work in the field of community ecology has shown that consumptive predator effects can reduce the intensity of competition between two interacting species, which is known as density mediated indirect interactions in the literature (reviewed in Sih et al. 1985; Gurevitch et al. 2000; Chase et al. 2002). These indirect positive effects of predators have also been studied in the context of intra-specific interactions, i.e., within a single prey species, focussing mostly on prey life history traits. For example, predation can increase resource availability for survivors and indirectly affect life history traits, such as increased fecundity and reproductive allotment in guppies (Walsh and Reznick 2008; Zandona et al. 2011). To our knowledge, this is the first study that has demonstrated a behavioural response elicited towards predators—attraction to the enemy—as a consequence of indirect positive effects by predators, within a single prey species.
Our study also shows that a female’s response to the ecological conditions in a pool appears to be affected by those in neighbouring pools, suggesting that females make decisions at multiple scales—both at individual pool and at pool network scales. We predicted that the degree to which a female should prefer the control (predator-free) pool would be highest at high predator density treatments, as the risk difference between pools is maximum. While this expectation held for OAI, other behavioural responses were contrary to our expectation. That is, of the eggs laid, females preferentially oviposited in the predator pool when predator density was low but preferentially oviposited in the predator-free pool when predator density was high. However, the overall number of eggs laid (summed across both predator and control pools presented) strongly decreased with increasing predator density. We also find that females exercise choice through different kinds of decisions, by either manipulating the number of eggs laid in a given pool or by completely rejecting a pool. Females rejected the control pool altogether more often when it was paired with a high predator density pool (0–6) than when it was paired with a low predator density pool (0–2). A possible explanation for females considering pool networks instead of only the condition in an individual pool is that sampling pools is costly and sampling a subset of pools reduces search costs. Several studies in the foraging literature have shown that animals sample for foraging sites at multiple spatial scales—for example, at the level of a patch or an individual tree (Kotler and Brown 1988; Kneitel and Chase 2004; Naniwadekar et al. 2015).
Prey response to the risk of predation is typically studied under the paradigm of anti-predator response, with prey animals in constant fear of predators (Brown et al. 1999; Coleman and Hill 2014). Our study shows that predation risk could result in selection for diverse prey responses, ranging from predator attraction to aversion. We predict that, in systems with spatially structured populations with limited dispersal, such as rock pools, intertidal zones, and meadow patches, traits that increase interaction with predators are likely to be under selection, because local competition can have large unavoidable costs. For example, many aquatic systems experience high conspecific competition, resulting in large mortality costs (Achord et al. 2003; Hixon and Jones 2005; Muriu et al. 2013). We suggest that future work could focus on such systems to test how multiple selection pressures along a gradient in one or more of these selection pressures could lead to unexpected variation in anti-predator responses.
Data accessibility
We would be happy to provide the raw data for the analyses and results reported in this manuscript. On acceptance, we would be happy to archive the data files, R code supporting the results.
References
Achord S, Levin PS, Zabel RW (2003) Density-dependent mortality in Pacific salmon: the ghost of impacts past? Ecol Lett 6(4):335–342. https://doi.org/10.1046/j.1461-0248.2003.00438.x
Agnew P, Hide M, Sidobre C, Michalakis Y (2002) A minimalist approach to the effects of density-dependent competition on insect life-history traits. Ecol Entomol 27(4):396–402. https://doi.org/10.1046/j.1365-2311.2002.00430.x
Albeny-Simões D, Murrell EG, Elliot SL, Andrade MR, Lima E, Juliano SA, Vilela EF (2014) Attracted to the enemy: Aedes aegypti prefers oviposition sites with predator-killed conspecifics. Oecologia 175(2):481–492. https://doi.org/10.1007/s00442-014-2910-1
Alencar J, Mello CF, Barbosa LS, Gil-Santana HR, Maia DA, Marcondes CB, Silva JS (2016) Diversity of yellow fever mosquito vectors in the Atlantic Forest of Rio de Janeiro, Brazil. Rev Soc Bras Med Trop 49(3):351–356. https://doi.org/10.1590/0037-8682-0438-2015
Angelon KA, Petranka JW (2002) Chemicals of predatory mosquitofish (Gambusia affinis) influence selection of oviposition site by Culex mosquitoes. J Chem Ecol 28(4):797–806. https://doi.org/10.1023/A:1015292827514
Armbruster P, Hutchinson RA (2002) Pupal mass and wing length as indicators of fecundity in Aedes albopictus and Aedes geniculatus (Diptera: Culicidae). J Med Entomol 39(4):699–704. https://doi.org/10.1603/0022-2585-39.4.699
Bates D, Mächler M, Bolker B, Walker S (2015) Fitting linear mixed-effects models using lme4. J Stat Softw 67(1):1–48. https://doi.org/10.18637/jss.v067.i01
Belovsky GE, Laws AN, Slade JB (2011) Prey change behaviour with predation threat, but demographic effects vary with prey density: experiments with grasshoppers and birds. Ecol Lett 14(4):335–340. https://doi.org/10.1111/j.1461-0248.2011.01591.x
Blaustein L (1999) Oviposition habitat selection in response to risk of predation: consequences for populations and community structure. In: Wasser SP (ed) Evolutionary processes and theory: modern perspectives. Kluwer Academic Publishers, Dordrecht, The Netherlands, pp 441–456
Briegel H (1990) Metabolic relationship between female body size, reserves, and fecundity of Aedes aegypti. J Insect Physiol 36(3):165–172. https://doi.org/10.1016/0022-1910(90)90118-Y
Brown JS (1999) Vigilance, patch use and habitat selection: foraging under predation risk. Evol Ecol Res 1:49–71
Brown JS, Laundré JW, Gurung M (1999) The ecology of fear: optimal foraging, game theory, and trophic interactions. J Mammal 80(2):385–399. https://doi.org/10.2307/1383287
Chadee DD, Corbet PS (1990) Diel patterns of oviposition indoors of the mosquito, Aedes aegypti (L.) (Diptera: Culicidae) in Trinidad, W.I.: a preliminary study. Ann Trop Med Parasitol 84(1):79–84. https://doi.org/10.1080/00034983.1990.11812435
Chadee D, Ward R (1998) Natural habitats of Aedes aegypti in the Caribbean—a review. J Am Mosq Control Assoc 14(1):5–11
Chase JM, Abrams PA, Grover JP, Diehl S, Chesson P, Holt RD et al (2002) The interaction between predation and competition: a review and synthesis. Ecol Lett 5(2):302–315. https://doi.org/10.1046/j.1461-0248.2002.00315.x
Clements AN (1992) The biology of mosquitoes: development, nutrition and reproduction. Chapman and Hall, London
Clements AN (1999) The biology of mosquitoes: sensory reception and behaviour. CABI, Wallingford
Coleman BT, Hill RA (2014) Living in a landscape of fear: the impact of predation, resource availability and habitat structure on primate range use. Anim Behav 88:165–173. https://doi.org/10.1016/j.anbehav.2013.11.027
Colton YM, Chadee DD, Severson DW (2003) Natural skip oviposition of the mosquito Aedes aegypti indicated by codominant genetic markers. Med Vet Entomol 17:195–204. https://doi.org/10.1046/j.1365-2915.2003.00424.x
Cooper WE (2006) Dynamic risk assessment: prey rapidly adjust flight initiation distance to changes in predator approach speed. Ethology 112(9):858–864. https://doi.org/10.1111/j.1439-0310.2006.01240.x
Creel S, Christianson D (2008) Relationships between direct predation and risk effects. Tree 23(4):194–201. https://doi.org/10.1016/j.tree.2007.12.004
Creel S, Winnie J, Maxwell B, Hamlin K, Creel M (2005) Elk alter habitat selection as an antipredator response to wolves. Ecology 86(12):3387–3397. https://doi.org/10.1890/05-0032
Dill LM, Fraser AHG (1984) Risk of predation and the feeding-behavior of juvenile coho salmon (Oncorhynchus kisutch). Behav Ecol Sociobiol 16(1):65–71
Dupuch A, Magnan P, Bertolo A, Dill LM, Proulx M (2009) Does predation risk influence habitat use by northern redbelly dace Phoxinus eos at different spatial scales? J Fish Biol 74(7):1371–1382. https://doi.org/10.1111/j.1095-8649.2009.02183.x
Eitam A, Blaustein L (2004) Oviposition habitat selection by mosquitoes in response to predator (Notonecta maculata) density. Physiol Entomol 29(2):188–191. https://doi.org/10.1111/j.0307-6962.2004.0372.x
Fincke OM, Yanoviak SP, Hanschu RD (1997) Predation by odonates depresses mosquito abundance in water-filled tree holes in Panama. Oecologia 112:244–253. https://doi.org/10.1007/s004420050307
Gelman A, Weakliem D (2009) Of beauty, sex, and power: statistical challenges in estimating small effects. Am Sci 97:310–316
Gurevitch J, Morrison JA, Hedges LV (2000) The interaction between competition and predation: a meta-analysis of field experiments. Am Nat 155(4):435–453. https://doi.org/10.1086/303337
Harrington LC, Ponlawat A, Edman JD, Scott TW, Vermeylen F (2008) Influence of container size, location, and time of day on oviposition patterns of the dengue vector, Aedes aegypti, in Thailand. Vector Borne Zoonotic Dis 8(3):415–424. https://doi.org/10.1089/vbz.2007.0203
Hebblewhite M, Merrill EH (2009) Trade-offs between predation risk and forage differ between migrant strategies in a migratory ungulate. Ecology 90(12):3445–3454. https://doi.org/10.1890/08-2090.1
Heithaus M, Dill L (2006) Does tiger shark predation risk influence foraging habitat use by bottlenose dolphins at multiple spatial scales? Oikos 114(2):257–264. https://doi.org/10.1111/j.2006.0030-1299.14443.x
Hill RA, Dunbar R (1998) An evaluation of the roles of predation rate and predation risk as selective pressures on primate grouping behaviour. Behaviour 135(4):411–430. https://doi.org/10.1163/156853998793066195
Hixon MA, Jones GP (2005) Competition, predation, and density-dependent mortality in demersal marine fishes. Ecology 86(11):2847–2859. https://doi.org/10.1890/04-1455
Juliana JRS, Kotler BP, Brown JS, Mukherjee S, Bouskila A (2011) The foraging response of gerbils to a gradient of owl numbers. Evol Ecol Res 13(8):869–878
Katz MW, Abramsky Z, Kotler BP, Rosenzweig ML, Altstein O, Roth I, Klimovitsky C (2016) Comparing the non-lethal and lethal effects of predation risk on goldfish anti-predatory behavior. Isr J Ecol Evol 62(3–4):121–127. https://doi.org/10.1080/15659801.2015.1059720
Kneitel JM, Chase JM (2004) Trade-offs in community ecology: linking spatial scales and species coexistence. Ecol Lett 7(1):69–80. https://doi.org/10.1046/j.1461-0248.2003.00551.x
Kotler BP, Brown JS (1988) Environmental heterogeneity and the coexistence of desert rodents. Ann Rev Ecol Syst 19:281–307. https://doi.org/10.1146/annurev.es.19.110188.001433
Kramer WL, Mulla MS (1979) Oviposition attractants and repellents of mosquitoes: oviposition responses of Culex mosquitoes to organic infusions. Env Entomol 8(6):1111–1117. https://doi.org/10.1093/ee/8.6.1111
Laundre JW, Hernandez L, Ripple WJ (2010) The landscape of fear: ecological implications of being afraid. Open Ecol J 3(3):1–7. https://doi.org/10.2174/1874213001003030001
Lima SL (1998) Nonlethal effects in the ecology of predator-prey interactions. BioScience 48(1):25–34. https://doi.org/10.2307/1313225
Livdahl TP, Sugihara G (1984) Non-linear interactions of populations and the importance of estimating per capita rates of change. J Anim Ecol 53(2):573–580
Muriu SM, Coulson T, Mbogo CM, Godfray HCJ (2013) Larval density dependence in Anopheles gambiae s.s., the major African vector of malaria. J Anim Ecol 82(1):166–174. https://doi.org/10.2307/4535
Murphy PJ (2003) Does reproductive site choice in a neotropical frog mirror variable risks facing offspring? Ecol Monogr 73(1):45–67. https://doi.org/10.1890/0012-9615(2003)073%5b0045:drscia%5d2.0.co;2
Naniwadekar R, Mishra C, Datta A (2015) Fruit resource tracking by hornbill species at multiple scales in a tropical forest in India. J Trop Ecol 31:1–14. https://doi.org/10.1017/S0266467415000449
Okasanen L, Fretwell SD, Arruda J, Niemela P (1981) Exploitation ecosystems in gradients of primary productivity. Am Nat 118(2):240–261. https://doi.org/10.1086/283817
Paine RT (2010) Trophic cascades: predators, prey and the changing dynamics of nature. Island Press, Washington DC
Preisser EL, Bolnick DI (2008) The many faces of fear: comparing the pathways and impacts of nonconsumptive predator effects on prey populations. PLoS One 3(6):5–8. https://doi.org/10.1371/journal.pone.0002465
Preisser EL, Bolnick DI, Bernard MF (2005) Scared to death? The effect of intimidation and consumption in predator prey interactions. Ecology 86(2):501–509. https://doi.org/10.1890/04-0719
Preisser EL, Bolnick DI, Grabowski JH (2009) Resource dynamics influence the strength of non-consumptive predator effects on prey. Ecol Lett 12(4):315–323. https://doi.org/10.1111/j.1461-0248.2009.01290.x
R Core Team (2017) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna
Relyea RA (2001) The relationship between predation risk and antipredator responses in larval anurans. Ecology 82(2):541–554. https://doi.org/10.1890/0012-9658(2001)082%5b0541:trbpra%5d2.0.co;2
Rieger JF, Binckley CA, Resetarits WJ Jr (2004) Larval performance and oviposition site preference along a predation gradient. Ecology 85(8):2094–2099. https://doi.org/10.1890/04-0156
Sih A (1992) Prey uncertainty and the balancing of antipredator and feeding needs. Am Nat 139(5):1052–1069. https://doi.org/10.1086/285372
Sih A, Crowley P, McPeek M, Petranka J, Strohmeier K (1985) Predation competition, and prey communities: a review of field experiments. Ann Rev Ecol Syst 16:269–311. https://doi.org/10.1146/annurev.es.16.110185.001413
Silberbush A, Blaustein L (2011) Mosquito females quantify risk of predation to their progeny when selecting an oviposition site. Func Ecol 25(5):1091–1095. https://doi.org/10.1111/j.1365-2435.2011.01873.x
Southwood TRE, Murdie G, Yasuno M, Tonn RJ, Reader PM (1972) Studies on the life budget of Aedes aegypti in Wat Samphaya, Bangkok, Thailand. Bull World Health Organ 46:211–226
Sparks JT, Bohbot JD, Dickens JC (2014) The genetics of chemoreception in the labella and tarsi of Aedes aegypti. Insect Biochem Mol Bio 48:8–16. https://doi.org/10.1016/j.ibmb.2014.02.004
Spencer M, Blaustein L, Cohen JE (2002) Oviposition habitat selection by mosquitoes (Culiseta longiareolata) and consequences for population size. Ecology 83(3):669–679. https://doi.org/10.1890/0012-9658(2002)083%5b0669:ohsbmc%5d2.0.co;2
Tun-Lin W, Burkot TR, Kay BH (2000) Effects of temperature and larval diet on development rates and survival of the dengue vector Aedes aegypti in north Queensland, Australia. Med Vet Entomol 14:31–37. https://doi.org/10.1046/j.1365-2915.2000.00207.x
Verdolin JL (2006) Meta-analysis of foraging and predation risk trade-offs in terrestrial systems. Behav Ecol Sociobiol 60(4):457–464. https://doi.org/10.1007/s00265-006-0172-6
Vonesh JR, Blaustein L (2010) Predator-induced shifts in mosquito oviposition site selection: a meta-analysis and implications for vector control. Isr J Ecol Evol 56(3–4):123–139. https://doi.org/10.1560/IJEE.56.3-4.263
Walsh MR, Reznick DN (2008) Interactions between the direct and indirect effects of predators determine life history evolution in a killifish. PNAS 105(2):594–599. https://doi.org/10.1073/pnas.0710051105
Walsh RK, Facchinelli L, Ramsey JM, Bond JG, Gould F (2011) Assessing the impact of density dependence in field populations of Aedes aegypti. J Vector Ecol 36(2):300–307. https://doi.org/10.1111/j.1948-7134.2011.00170.x
Winnie JJ, Creel S (2017) The many effects of carnivores on their prey and their implications for trophic cascades, and ecosystem structure and function. Food Webs 12:88–94. https://doi.org/10.1016/j.fooweb.2016.09.002
Wong J, Stoddard ST, Astete H, Morrison AC, Scott TW (2011) Oviposition site selection by the dengue vector Aedes aegypti and its implications for dengue control. PLoS Negl Trop Dis 5:4. https://doi.org/10.1371/journal.pntd.0001015
Zandona E, Auer SK, Kilham SS, Howard JL, Lopez-Sepulcre A, Connor MPO et al (2011) Diet quality and prey selectivity correlate with life histories and predation regime in Trinidadian guppies. Func Ecol 25(5):964–973. https://doi.org/10.1111/j.1365-2435.2011.01865.x
Acknowledgements
We thank Mahalakshmi and Rajashree for maintenance of mosquito colony; Karthikeyan Chandrasegaran for discussions; Rishi Valley School and Indian Institute of Science for providing infrastructure. The work was supported by Department of Biotechnology—Indian Institute of Science (DBT-IISc) partnership Grant, Department of Science and Technology—Fund for Improvement of S&T infrastructure (DST-FIST) Grant and Ministry of Human Resource Development—Indian Institute of Science for graduate scholarship. Funding was provided by Department of Biotechnology, Ministry of Science and Technology.
Author information
Authors and Affiliations
Contributions
MS and KI designed the study. MS collected the data and wrote the first draft of the manuscript. MS, SQ, VG, and KI contributed substantially to revisions.
Corresponding author
Additional information
Communicated by Aaron J. Wirsing.
We wish to submit this work for the Highlighted student research category. This work was done as part of the Ph.D. thesis of the lead author. In this study, we take a rare approach of measuring fitness pay-offs in multiple currencies to explain the puzzle of how predation risk can induce variability in anti-predator responses—from attraction to aversion towards predators.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Sharma, M., Quader, S., Guttal, V. et al. The enemy of my enemy: multiple interacting selection pressures lead to unexpected anti-predator responses. Oecologia 192, 1–12 (2020). https://doi.org/10.1007/s00442-019-04552-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00442-019-04552-4