
Abstract
Here we present a task developed to probe implicit learning of a complex motor skill. This task addresses limitations related to task complexity noted in the literature for methods investigating implicit motor learning, namely the serial reaction time task and continuous tracking task. Specifically, the serial reaction time task is limited by the kinematic simplicity of the required movement and the continuous tracing task faces time-on-task confounds and limitations in the control of task difficulty. The task presented herein addresses these issues by employing a kinematically complex multi-articular movement that controls factors that contribute to task difficulty: stimulus animation velocity and trajectory complexity. Accordingly, our objective was to validate the use of this task in probing implicit motor learning, hypothesizing that participants would learn one of the repeating stimuli implicitly. Participants engaged in six blocks of training whereby they first observed and then reproduced a seemingly random complex trajectory. Repeated trajectories were embedded amongst random trajectories. In line with the hypothesis, error for the repeated trajectories was decreased in comparison to that observed for the random trajectories and 73% of participants were unable to identify one of the repeated trajectories, demonstrating the occurrence of implicit learning. While the task requires minor alteration to optimize learning, ultimately the findings underline the task’s potential to investigate implicit learning of a complex motor skill.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Implicit learning, which is characterized by an inability to articulate the learning that occurs, has been shown to be a critical component of motor learning (for a review on the topic please see Destrebecqz & Cleeremans, 2001; Dienes et al., 1991; Jamieson et al., 2017; Maresch et al., 2021; Nissen & Bullemer, 1987; Rohrmeier & Rebuschat, 2012; Sævland & Norman, 2016). Numerous investigations of implicit learning have employed the serial reaction time task (SRTT; for a review see Schwarb & Schumacher, 2012). In the SRTT, simple movements (i.e., sequences of keypresses) are practiced, in which a repeating pattern is learned yet unable to be reported (Nissen & Bullemer, 1987). Widespread use of this task and modified versions, including those employed to reduce the chance of explicit learning (e.g., by embedding multiple sequences or sequence types during practice; see Kaufman et al., 2010; Kraeutner et al., 2016; Sanchez & Reber, 2012; Wilkinson & Shanks, 2004 for examples), have thus demonstrated the robustness of the SRTT to investigate implicit learning. However, while the SRTT has a motor component (i.e., button presses), the generalizability of findings from the SRTT to other contexts of implicit motor learning may be limited due to the simplicity of the motor component of the skill being learned and additional reliance on perceptual learning (i.e., improved recognition of the stimulus and the resulting mapping of perceptual cues to movement goals) compared to other complex motor tasks (Schwarb & Schumacher, 2012; Wulf & Shea, 2002). Specifically, SRTTs appear to probe the ability to order discrete actions or chunks of discrete actions, rather than execution of a sequential movement whereby the cognitive demands of the SRTT can be increased (see Jiménez & Vázquez, 2005; Schvaneveldt & Gomez, 1998; Vandenbossche et al., 2014 for examples) but the motor demands of this task remain limited due to the simple kinematic nature of the task (Robertson, 2007; Wong & Krakauer, 2019). Thus, employing a task that is more representative of the kinematic complexity of movements performed in everyday life would help to advance our understanding of implicit motor learning.
An alternative paradigm to the SRTT, the continuous tracking task (CTT) was developed to investigate implicit motor learning of a more kinematically complex movement (Pew, 1974). Unlike the SRTT, the motor component of the CTT is more kinematically demanding, and thus instead of mapping a simple motor response to a perceptual cue (as in the SRTT), participant performance depends more on their ability to execute the necessary action (Pew, 1974; Wulf & Schmidt, 1997). In brief, participants are asked to track a target moving across a screen by manipulating a joystick (or other hand-driven device) in a seemingly random waveform trajectory. Similar to the SRTT, the trajectory is segmented into three sections whereby the second segment is repeated throughout practice unbeknownst to the participant. Implicit learning of the repeated segment has been demonstrated to occur, evidenced by decreased error of the repeated vs. random segments in conjunction with participants being unaware of the repeated trajectory when queried (Pew, 1974; Wulf & Schmidt, 1997). Although the CTT has been used in investigations of implicit motor learning in a number of domains (for examples see Oliveira et al., 2017; Sekiya, 2006; Siengsukon & Boyd, 2008), it has been subject to criticism due to conflicting evidence demonstrating the magnitude of learning (Chambaron et al., 2005; Lang et al., 2013; Wulf & Schmidt, 1997).
Criticisms of the CTT noted in previous literature have highlighted the structure of the practice trials. Specifically, the ordering of the segments is constant throughout training, in that the repeated segment always appears in the middle position between two random segments. Thus, extraneous “time-on-task” confounds may be introduced when assessing learning due to a step-wise degradation in performance across the task (Zhu et al., 2014). Further, task difficulty, particularly the speed of the target, is not controlled for in many cases between the random and repeated segments. Performance improvements to the repeated segment, and thus implicit learning, is suggested to be observed only because the random segments are more difficult to track than the repeated segment (Chambaron et al., 2005; Zhu et al., 2014).
Indeed, in light of the aforementioned design flaws, modifications have been made in an attempt to improve the CTT (Künzell et al., 2016; Zhu et al., 2014). For instance, comparing the average performance across both random segments vs. the repeated segment is recommended to account for time-on-task confounds (Chambaron et al., 2005; Künzell et al., 2016; Wulf & Schmidt, 1997; Zhu et al., 2014). However, a critical assumption of this comparison is that the decrement in performance is linear. While a linear trend has been demonstrated (Zhu et al., 2014), the analyses were limited by the number of data points included, and models have not been tested using exponential or log-linear functions previously shown to predict improvements in performance (Heathcote et al., 2000; Sanchez & Reber, 2012). Further, Künzell et al. (2016) showed task difficulty modulates the success of implicit learning via the CTT. Specifically, improvements in performance on the repeated vs. random segments were not observed when slow target speeds were employed during training. The authors suggested that faster target speeds, and thus increased task difficulty, are required to detect an effect of learning (Künzell et al., 2016). Importantly, while target speed is one component of task difficulty, task difficulty can also be modulated by increasing the complexity of the trajectory itself. Generally, coefficients of the waveform equation are adjusted within a specific range to create the complex trajectories, yet previous studies have not quantified or reported evidence of controlling for the complexity of these patterns across trials or segments. Thus, as task difficulty is shown to modulate the success of implicit learning, it is critical to control for task difficulty in terms of both target speed and complexity.
Further investigations using the CTT have reduced the difficulty of the task by increasing the predictability of responses by increasing the amount of available information to participants in combination with explicitly informing participants of the repeating portion of the task (Broeker et al., 2020, 2021). While successfully making the task easier, these manipulations were likely too extreme and introduced ceiling effects in the data and rendered an implicit vs. explicit comparison null (Broeker et al., 2020). Despite the advancements made to modulate task difficulty in the CTT, the extraneous confounds introduced by the ordering of segments during training and lack of control of both the speed and complexity of the trajectory employed may explain the conflicting evidence of detecting implicit learning using the CTT (Broeker et al., 2020, 2021; Chambaron et al., 2005; Künzell et al., 2016; Lang et al., 2013; Wulf & Schmidt, 1997; Zhu et al., 2014).
Here, we introduce a task for investigating implicit learning of a kinematically complex motor skill that allows for precise control of stimulus animation velocity and complexity (using both total absolute curvature and to quantify trajectory complexity; detailed below), without extraneous confounds due to time-on-task. Accordingly, our primary objective was to validate this new task for characterizing implicit learning of a complex motor skill that relies on improvement to motor execution. For this task, learning is defined as a reduction in error between a trajectory drawn by the participant on a touchscreen (i.e., the participant response) and a stimulus trajectory (Fig. 1). In contrast to the CTT, task difficulty can be modulated in our task by controlling the stimulus animation velocity and the complexity of the trajectories. During training, participants practiced seemingly random complex trajectories animated at different velocities that required unilateral arm and hand movements, however, two repeated trajectories were embedded throughout training for each participant. Two repeated trajectories of similar complexity to the random trajectories (see Repeated Trajectories) were presented at different frequencies, rather than a single repeating segment or sequence, to increase the likelihood that the less frequently presented stimulus would be learned implicitly. Critically, the inclusion of two repeated trajectories creates a within-participant contrast whereby the repeated trajectory that is presented more often is learned explicitly and the second, less-repeated trajectory, is learned implicitly. In this context, the difference in performance to each repeated trajectory defines the contribution of explicit awareness to motor learning for each participant. This manipulation was based on the logic that within task, participants could learn different practiced movements with varying levels of conscious recollection. To test this manipulation, participants were queried at the end of the experiment with a robust explicit knowledge test (detailed in Experimental Procedure). This test made classification based solely on recognition that there was a repeated stimuli and not the participant’s ability to create the repeated trajectory. In this context, a trajectory was learned implicitly only if participants could not recognize it after training. This comparison directly contrasts those employed in the SRTT and CTT that use explicit awareness questionnaires to classify individuals as explicit or implicit learners and, as a consequence, the contributions of implicit and explicit learning is made between participants (H. E. Ewolds et al., 2017; Schwarb & Schumacher, 2012). Using this within-subject contrast, we hypothesized that implicit learning would be observed, whereby participants would not recognize at least one repeating trajectory during training, as per the recognition test, and the resulting error for both repeated trajectories would be decreased in comparison to the random trajectories. Secondly, we hypothesized that the effect of learning would be larger for trajectories learned explicitly versus those that were learned implicitly. These learning effects would be denoted in subsequent models by credible main effects and interactions of the terms LEARNINGTYPE1, that denotes the contrast of implicitly versus explicitly learned trajectories, and LEARNINGTYPE2, that denotes the contrast of random to repeated trajectories. By showing improvements in performance on the repeated vs. random trajectories with and without conscious awareness while controlling for stimulus animation velocity and trajectory complexity, findings of the current study will generate new knowledge related to methods for probing implicit motor learning of complex skills.

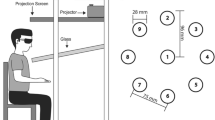
A visualization from Ingram et al., 2019 depicting a typical trial the proposed paradigm. Note that the feedback pictured is simply for illustrative purposes and participants did not get any feedback about their performance while they were actively tracing the trajectory
Methodology
Participants
Thirty participants (26 females, 20.5 ± 4.4 years, 25 right-handed, EHI laterality quotient 0.57 ± 0.51) from the local and university community volunteered to participate in the study. Participants were recruited via word of mouth, an experimental participation system within the Dept. of Psychology and Neuroscience, and via posters placed on the university campus and within the local community. Participants were either provided with a partial course credit, if recruited through the experimental participation system, or an honorarium for their time. Handedness was determined by the Edinburgh Handedness Inventory (Oldfield, 1971). All participants were at least 17 years old, reported normal hearing, were free of neurological or musculoskeletal disorders that may affect upper limb function, and each provided written informed consent. Prior to beginning the experimental task, all participants verbally confirmed they understood the study instructions. The Dalhousie University Health Sciences research ethics board approved the study.
Experimental task
Participants were asked to perform a behavioural task that emphasized the execution of complex movements using custom software developed in the Python (version 2.7.10) programming environment. The task was adapted from Ingram et al., 2019 (https://github.com/LBRF-Projects/Implicit_CME_Solomon2023_Experiment). The experiment involved engaging in six blocks of training, followed by an explicit knowledge test. All participants performed the experiment in a seated position directly in front of a horizontally oriented 24″ touchscreen (Planar PCT2485; 1920 × 1080 resolution) enclosed within a black box to reduce distractions and ensure screen illumination was constant across sessions and participants. Participants performed the task with their dominant hand, with their non-dominant hand resting comfortably in their lap. Participants were oriented to a starting point represented by a red circle located at the midpoint of the lower half of the screen.
During the task, participants engaged in six training blocks whereby they were instructed to execute complex trajectories that were cued by a white cursor on the screen (Ingram et al., 2019). Trials began with the participant tapping a start button to initiate the movement of a white cursor originating from the starting point which animates a trajectory that participants subsequently reproduce. Importantly, the animation left no trace on the screen for the participants to track. Immediately following the animation of the trajectory, participants were instructed to touch the starting point to begin reproducing the trajectory they had just observed, matching the velocity at which it was animated. A real-time trace appeared on the screen as participants executed their movements. When participants returned to the starting point the trial ended. Movement time was operationalized as the time between the beginning and end of a participant’s response (Ingram et al., 2019).
Task modifications from Ingram et al., 2019 to permit the study of implicit learning included the use of a second repeated trajectory. Trials consisted of either randomly generated trajectories or one of two repeated trajectories with similar characteristics as those that were randomly generated (i.e., path length, complexity and curve characteristics; described below). The first repeated trajectory accounted for 30% of the total trials (R-30 condition), and the second repeated trajectory accounted for 20% of the total trials (R-20 condition). The remaining 50% of the total trials were randomly generated trajectories. During the experimental session, a participant performed a total of 180 trials (30 trials per block). Thus, each participant performed 90, 54, and 36 trajectories for the random, R-30, and R-20 conditions. Appearance of the trajectories was pseudorandomized over and within the six blocks, such that 15 random, 9 R-30, and 6 R-20 trials appeared in each of the six blocks. As an overarching objective of the study was to explore the utility of this new task to probe implicit learning of a complex motor task, we chose to include two repeated trajectories that appeared at different ratios of exposure, similar to Wilkinson and Shanks (2004) who sought to minimize the chance of explicit learning, to further provide insight on the optimal parameters for investigating implicit motor learning.
Trajectories
To construct the complex trajectories, 5 segment end points were pseudo randomly generated such that at least one was present in each quadrant of the screen (Ingram et al., 2019). Curves were animated by generating Bezier curves with randomly generated control points that determined curve peak magnitude, shift, and shear. Varying trajectory velocities were achieved by pseudo randomizing three animation times (500, 1500, and 2500ms) such that each had equal exposure within each trajectory type and within each block of practice. Since the path length was able to freely vary, the manipulation of animation times created a distribution of animation velocity that was used in the statistical analysis (trajectory path length/animation time (px/s)).
Repeated trajectories
Five repeated trajectories were selected to ensure their characteristics were as similar as possible to the randomly generated trajectories: each consisted of five segments with the same constraints as described above. To account for features that varied for the random trajectories (i.e., path length and the two measures of complexity; described below), repeated trajectories were selected to fall narrowly within half a standard deviation of the median value of the random trajectories (Ingram et al., 2019). Additionally we avoided: (1) trajectories that came too close to the end position part way though the animation to avoid participants accidentally ending a trial early; (2) trajectories that included difficult to identify vertices (despite the minimum linear acuteness constraint); and (3) trajectories in which curves were not evenly distributed between quadrants to avoid bias toward a particular area of the screen to avoid participants changing their positioning over the course of the experiment.
Following selection of the five repeated trajectories to be used in the experiment, five different sets were created by randomly selecting two of these 5 trajectories for each set. The first trajectory randomly selected for each set was the R-30 condition trajectory, with the second trajectory selected set as the R-20 condition trajectory. The five sets were then pseudorandomized and counterbalanced across participants.
Complexity measures
As task difficulty is shown to modulate implicit learning of a complex movement (Chambaron et al., 2005; Wulf & Schmidt, 1997; Zhu et al., 2014), complexity was determined for each repeated and random trajectories to ensure similarity (as described above). Specifically, trajectory complexity was characterized using two complimentary measures: total absolute curvature (TAC) and approximate entropy (ApEn). TAC is a measure of the magnitude of curvature over the course of a trajectory. Curvature has been used to characterize movement complexity in previous work (Wong et al., 2016) whereby, when controlling for speed, more curved movements involve greater and more frequent changes in muscle activity (Brown & Cooke, 1990; Cooke & Brown, 1994). As the trajectories in the current study involved discontinuities at segment end points (vertices), TAC was approximated by taking the sum of the absolute value of the point-by-point turning angle. ApEn is a measure of the predictability of a sequence (Pincus, 1991), and is useful for characterizing biological motion even in short data sets when used appropriately (Yentes et al., 2013). Respectively, TAC and ApEn allow for characterization of kinematic complexity operationalized as the magnitude and irregularity of a trajectory’s curvature.
Experimental procedure
At the outset of the study, participants completed the Edinburgh Handedness Inventory (Oldfield, 1971) to determine their dominant hand, which was used to complete the experiment. As described above, the participant first observed the trajectory and then was asked to replicate the trajectory matching as closely as possible its shape and velocity. The end of each block was cued by on-screen text, indicating that the participant could take a break and to continue when ready, as well as reminding the participant to try their best to match the velocity of the observed trajectory when executing their movements.
Immediately following the six blocks, participants completed an explicit knowledge test to determine the nature of the learning that had occurred which was divided into two steps: a recognition test and a free recall test. In the recognition test, participants were first informed that there might have been two trajectories that repeated during the training. Participants were then asked to respond “yes” or “no” to the question: “Do you think you learned a repeating figure during the practice blocks”? Importantly, participants were instructed “it was okay if they did not think they learned a repeating figure”. If a participant responded “yes”, they were then entered into a free recall test where they were asked to generate on the touchscreen the trajectory that they learned (i.e., like the trials throughout training but without a prompt). They were then asked to repeat the recognition test by responding “yes” or “no” to the question: “Do you think you learned another repeating figure during the training blocks”? Again, participants were instructed “it was okay if they did not think they learned another repeating figure”. If a participant responded “yes” to this second question, they were then asked if they could generate the second trajectory that they learned in a free recall test. Participants who answered “no” to the first question were not asked if they learned a second repeating trajectory. The trajectories generated as part of this test were recorded and stored for offline analysis to determine whether participants had acquired explicit knowledge (see Characterizing the nature of learning).
Data analysis
Preprocessing
Preprocessing was performed as per Ingram et al., 2019. Briefly, error was measured as the ordered point-by-point Euclidean distance between the stimulus and response trajectories. We ensured participants were not penalized for natural variation in movement velocity using dynamic time warping (DTW) to optimally transform participant response trajectories onto stimulus trajectories (Giorgino, 2009), allowing for error measures that are insensitive to local compression or stretches due to variability in timing. Additionally, it is possible that two different responses result in a similar error magnitude despite one having a more accurate “shape”, as such, participant responses were subject to an adjusted Procrustes transformation using the stimulus trajectory as a template (Goodall, 1991). Procrustes transformation has been used in the analysis of human movement in previous literature and accounts for natural variations in movement by freely adjusting size and spatial location of the trajectory while preserving its shape (Kadmon Harpaz et al. 2014). The adjustments made to the Procrustes transformation were to constrain the rotation and scaling components such that they identified solutions to each component that required minimal scaling and rotation. These adjustments were made to correct a behaviour where poorly reproduced stimuli would result in the original Procrustes transformations massively shrinking and rotating the response trajectories to achieve a mathematical best fit.
Procrustes and DTW transformed participant response trajectories were finally compared to the stimulus trajectory by calculating the distance between associated points in each time series. Error for a given trial was calculated as the mean of this point-by-point distance. Response velocity of each trial was calculated as the total path length divided by the movement time.
Characterising the nature of learning
The nature of learning was characterized via the explicit knowledge test. As described above, participants were first made aware that there may have been two repeating trajectories and were asked if they thought they learned either of these trajectories using a recognition and free recall test for each explicitly learned trajectory. If participants answered “yes” to the recognition test, they were asked to generate the trajectory/trajectories on the touchscreen. Explicit learning of each repeated trajectory was determined to occur if the participant identified that they recognized a repeating trajectory during training (i.e., answering “Yes” on the recognition test). To identify which trajectory was recalled, each generated trajectory was compared against both the R-20 and R-30 trajectories using the analysis described above. The more accurate comparison of the generated trajectory against the stimulus (R-20 or R-30) was identified as the explicitly recalled trajectory. This factor was operationalized as learning type which was a refactoring of trajectory condition (R-20, R-30 and random) as either “implicit”, “explicit” or “random” based on results of the explicit learning test.
Group analysis
To investigate the success of implicit learning (our primary objective), a Bayesian linear mixed model was conducted using the brms and stan packages in R (R version 4.12.0: brms version 2.17.0 (Bürkner, 2017). Interpretation of the results was made based on the continuum of the relative credibility of all effects revealed by the model, according to the Bayesian Analysis Reporting Guidelines (Kruschke, 2021). To facilitate this process, all variables were scaled to unit variance (mean = 0, sd = 1) and weakly informed regularizing priors assuming the mean would fall within 2 standard deviations of the data observed were used for all models.
In this model, error was predicted using exposure (the number of times a participant completed a trial of each trajectory type), animation velocity (how quickly a trajectory was animated on screen: see Trajectories), learning type (implicit, explicit, or random: see Characterizing the nature of learning) and complexity (TAC; see Complexity measures) as fixed effects. Random slopes for exposure, learning type and animation velocity were nested within a random intercept for each participant. A Helmert contrast was set for learning type to: (1) differentiate performance on the random trajectories and either repeated trajectory; and (2) differentiate the implicit from explicitly learned trajectories. Notably, the interactions of complexity with the other fixed effects were removed as there was only a single value for complexity at the implicit and explicit levels of learning type.
Participant error, animation velocity and complexity were log transformed when the distribution of raw values was heavily skewed and standardized to allow for intuitive priors. Uniformed but regularized priors were used throughout, and the final model is as follows:
All available data from each trial of each participant were fit to the model using Hamiltonian Monte Carlo sampling as implemented in Rstan and posterior densities for error were simulated using the derived generative model. The posterior distribution was then sampled, back transformed to their original scale and mean to visualize the credible effects from the model to aid in their interpretations.
Transparency and openness
We report all data exclusions, manipulations, and measures in the study. The analysis code, experimental code and data can be found at at https://osf.io/v45pq/ (https://doi.org/10.17605/OSF.IO/V45PQ). The analysis was written, performed and visualizations made in R version 4.12.0 and uses the following packages: brms version 2.17.0 (Bürkner, 2017), tidybayes version 3.0.2, (Kay, 2023), emmeans version 1.7.2 (Lenth et al., 2023), parameters version 0.19.0 (Lüdecke et al., 2020) modelr version 0.1.8. (Wickham, 2023), TSEntropies version 0.9, vegan version 2.5–7 (Oksanen et al., 2023) and dtw version 1.22–3 (Giorgino, 2009). The study was not pre-registered.
Results
Of the 30 participants, eight participants demonstrated explicit knowledge of both trajectories and one learned both trajectories implicitly. The remaining 21 participants recalled one of the two trajectories with 17 participants recalling the R-30 trajectory, and four participants demonstrated explicit knowledge of the R-20 trajectory. Given that 8.67 ± 11.34 (mean ± S.D.) trials per participant were removed, only the first 30 exposures were modeled to ensure that there were an even number of observations for each trajectory at each value of exposure.
The raw data is plotted in Fig. 2, visualizing the categorical predictors in the model. The Bayesian linear mixed model of this data reveal credible effects of learning type, animation velocity and the interaction of learning type and animation velocity (Table 1).

Mean trajectory error attained on exposures to trajectories learned implicitly (dark grey) and explicitly (light grey). Randomly generated trajectories are presented in black. Exposures were capped at 30 as participants were only exposed to 30 trials of the R-20 trajectory. Notably, the difference in mean trajectory error is consistent over the last 25 exposures. Bars represent standard deviation
Only the highest order interaction credible terms in the model were interpreted and visualized. The credible interaction of learning type and animation velocity demonstrates that at low velocities, the accuracy of participants is similar regardless of the trajectory’s learning type, but as the animation velocity increases the random trajectories were much harder to draw than either repeated trajectory, implicit or explicit, leading to better overall performance on the repeated figures in comparison to the randomly generated ones (Fig. 3). A three way-interaction between exposure learning type and animation velocity was also present, but the effect was contained entirely in the ROPE. Therefore, the effect was not large enough to meaningfully impact the result and it was not interpreted. The credible effect of complexity demonstrates that as complexity increased so did error (Fig. 4). This relationship indicates that as the trajectories became more complex, they became difficult to produce regardless of the velocity in which they were presented.

The credible interaction between animation velocity and learning type when predicting mean trajectory error [median ± 90% HDPI] for random (black) trajectories and those trajectories learned implicitly (dark grey) and explicitly (light grey). As velocity increased the repeated trajectories were re-created more accurately than randomly generated trajectories

The credible effect of complexity on mean trajectory error [median ± 90% HDPI]. As complexity increases the trajectories become harder to re-create
A credible interaction notably absent from the previous model was any effect or interaction with exposure. As such, it was simple to conclude that participants started on the task with differing levels of performance for each learned trajectory. This is however unlikely as participants were naïve to the task. A closer inspection of the raw data from the first 5 exposures to each learning type reveals a floor effect in the data where the performance gains on either repeated trajectory happen within the first few trials (Figs. 2 and 5).

Mean trajectory error on the first five exposures to trajectories learned implicitly (dark grey) and explicitly (light grey). Randomly generated trajectories are presented in black. Performance on the repeated trajectories appears to decrease as a function of exposure, whereas the mean trajectory error on the random trajectory is consistent across exposures. Bars represent standard deviation
The model was re-applied to a subset of the full dataset (the first five exposures to trajectories of each learning type) and revealed a credible interaction of exposure, learning type and animation velocity and a main effect of complexity (Table 2). One participant was removed from this analysis due to a high number of mistrials in the selected range of exposures, leaving 29 participants in the analysis. The effect of complexity once again shows that as complexity of the trajectories increases, so does participant error (Fig. 6). The interaction of exposure, learning type and animation velocity shows that at the experiment onset, the speed accuracy relationship is similar across the random versus repeated trajectories (Fig. 7). As participants become exposed to the repeated trajectories the speed accuracy relationship shifts downwards whereas in the random trajectories participants become steadily worse at drawing the faster animated trajectories but improve on those that animated slowly (Fig. 7). This improvement of performance is what leads to the credible effect of learning type in the results from the full dataset, however, this interaction effect in the first 5 exposures is of a small magnitude as indicated by the effect being partly contained in the ROPE.

The credible effect of complexity on mean trajectory error over the first 5 exposures to each trajectory [median ± 90% HDPI]. As complexity increases the trajectories become harder to re-create

The credible interaction between exposure, animation velocity and learning type when predicting mean trajectory error [median ± 90% HDPI] for random trajectories (black) and those trajectories learning implicitly (dark grey) and explicitly (light grey). The subplots represent each of the first 5 exposures to each trajectory type increasing from right to left. With more exposure to either repeated trajectory (implicit or explicit), the trajectories were drawn more accurately when the stimulus was animated at high velocities in comparison to random trajectories
Discussion
The primary objective of this study was to validate the use of a task in probing implicit learning of complex movements. Specifically, we sought to assess the occurrence of implicit learning following training of a unilateral complex upper limb motor task in which repeated trajectories were embedded amongst random trajectories. As hypothesized, error for the repeated trajectories was decreased in comparison to that observed for the random trajectories as determined by the highly credible interaction between animation velocity and learning type 2 in the full dataset (Table 1 and Fig. 3). Akin to the findings of Ingram et al., 2019, increasing the stimulus animation velocity increased error on the task, suggesting that the stimulus animation velocity manipulation produced the intended effect, but also highlighting that at low stimulus animation velocities the task is likely too easy as all trajectories are performed similarly (see Limitations). However, this performance improvement is realized early in the experiment as evidenced by a smaller, credible three-way interaction between exposure, learning type and animation velocity (Table 2 and Fig. 7). Further, 73% of all participants included in the final analyses were unable to identify at least one of the repeated trajectories. Thus, it is evident that a specific performance improvement to the repeated trajectories occurred following training, and that implicit learning resulted in similar performance gains to explicit learning on the task, in contrast to our second hypothesis. In addition to the noted learning effects, credible effects of complexity and stimulus animation velocity in both models (Tables 1 and 2) demonstrate that both measures of mediating task difficulty worked as intended, whereby faster animation velocities and more complex trajectories led to higher error in participant responses. By addressing limitations noted in the literature for other methods of investigating implicit motor learning (namely the SRTT and CTT), the task employed here included specific characteristics to probe implicit learning of a complex motor skill. Below we discuss these findings in the context of previous investigations of implicit learning, with a specific focus on task design.
Task characteristics
It is well established that the SRTT is robust to investigate implicit learning. As highlighted previously however, the nature of the SRTT makes it amenable more to investigating the perceptual, as opposed to motor, component of implicit learning. Specifically, the motor component of the SRTT and SRTT-like paradigms remains fixed even considering changes in task complexity; when mapping a kinematically simple movement such as a button press to a particular perceptual cue, increasing the attentional load such as in dual-task scenarios or perceptual complexity such as by lengthening the sequence increases task complexity, yet the motor component of the task does not change. Indeed, modified versions of the SRTT have shown reductions in the resulting implicit learning as cognitive demands of the task increased (Jiménez & Vázquez, 2005; Sanchez & Reber, 2012; Schumacher & Schwarb, 2009; Vandenbossche et al., 2014). For example, Sanchez and Reber (2012) systematically increased the length of the repeated sequence to examine the upper limit of implicit ability. Arguably, investigations such as this probe the upper limit of perceptual learning, as while the cognitive demands can be increased, the motor demands are fixed. Thus, as possible manipulations within this task impact cognitive demands, the SRTT is optimal for investigating implicit learning of perceptual-motor skills.
Our task, similar to the CTT, allows for implicit learning to be investigated specifically in the motor domain. While one could argue that reproducing trajectories does not parallel movements encountered in everyday life, the intent was to develop a task consisting of multi-articular, kinematically complex movements where performance was limited by the ability to execute the movement. Indeed, the movement employed in our task involves the shoulder, elbow, and wrist joint as well as the muscles acting on these joints. And unlike the SRTT, participants do not map a particular motor response to a perceptual cue (e.g., press button 1 in response to cue “1”). Rather, they engage the ‘motor program’ required for the given trajectory and the required encoding of the specific movement to the effector is more complex in nature.
Further, we sought to rigorously control for task difficulty in relation to both the animation velocity and complexity of the stimuli, as task difficulty is shown to be a key parameter in optimizing paradigms to probe implicit learning. In particular, we introduced manipulations that allow for a wide range of stimulus animation velocities and account for their effect when interpreting learning. Further, we employed TAC and ApEn to quantify the magnitude and irregularity of each trajectory’s curvature to precisely control for kinematic complexity across all trajectory types (Pincus, 1991; Wong et al., 2016; Yentes et al., 2013). Thus, in conjunction with the specific practice effect detected for the repeating trajectories, employing the different stimulus animation velocities equally across trajectory types and controlling for complexity by characterizing the magnitude and irregularity of a trajectory’s curvature ensured that robust implicit learning was detected without being artificially induced from variability in task difficulty. As indicated above, these design features were determined based on previous modifications and limitations noted above for the CTT. In particular, stimuli speed has been shown to modulate implicit learning via the CTT and that complexity, a critical component of task difficulty, has yet to be quantified in the CTT (Chambaron et al., 2005; Lang et al., 2013). The lack of a credible effect containing learning type (implicit vs. explicit) and stimulus animation velocity demonstrates that in this task the impact of stimulus animation velocity was not impactful when comparing implicitly to explicitly learned trajectories. Rather, stimulus animation velocity plays a vital role in learning as performance improvements were realized largely on repeated trajectories that animated quickly in comparison to random trajectories at similar animation velocities. Importantly, as the present task allows for the precise control of kinematic complexity and stimulus animation velocity, the ideal parameters for probing implicit motor learning can be further investigated using this task by incrementally manipulating these parameters during training.
As this study represented the initial examination of this new task, we included two repeated trajectories (R-30 and R-20) to probe the optimal parameters of exposure for investigating implicit motor learning that also minimized the occurrence of explicit learning, in a manner similar to that of Wilkinson and Shanks (2004). The repeated trajectories appeared equally across blocks at their given ratio of exposure. Additionally, we employed a pseudorandomized trial-by-trial design based on previous criticisms of the CTT. Employing a pseudorandomized design ensured that no extraneous time-on-task confounds were present as the ordering of the repeated vs. random trajectories are not consistent (Zhu et al., 2014). Using two repeated trajectories created a valuable contrast whereby it is possible to compare implicit and explicit learning on the task. Interestingly, the difference in implicit and explicit learning on this task was minimal, demonstrating that explicit knowledge of a practiced trajectory did not lead to improved performance. Importantly, the ability to change the ratio of repeated vs. random conditions allows for the further exploration of the ideal exposure parameter in investigating implicit motor learning, as exposure can be titrated to determine the lower bound of exposure in which no learning occurs (Kraeutner et al., 2016; Sanchez & Reber, 2012). The flexibility in the task to allow for user defined repeated trajectories will help optimize the parameter space for learning (complexity, exposure ratio, number of repeated trajectories and stimulus animation velocity). In this study, the repeated trajectory was likely too easy to perform, hence the lack of credible effects of exposure in the model of the entire dataset and a need to model the first few trials independently.
Analysis characteristics
In addition to task characteristics related to difficulty and design, the current work extends upon the previous investigations of implicit motor learning by employing a nuanced analysis of measuring trajectory error. In particular, investigations of implicit motor learning employing the CTT assess error as root mean square error, generally in screen pixels, between the participant controlled cursor (i.e., the participant response) and stimuli locations calculated for each segment (see Künzell et al., 2016; Zhu et al., 2014 for examples). The issue with using root mean square error as an outcome in the CTT is that it does not account for the mechanism underlying error on the task (Böttcher et al., 2023). For example, in the CTT the root mean square error can be minimized when the participant’s tracing aligns with the stimulus or if the participant’s response intersects the stimulus travelling in the opposite direction. Without interpreting the temporal domain of the task it is not possible to determine if this instance of low root mean square error is due to the participant’s good performance or their lack of ability to predict the direction of the stimulus. Two attempts have been made two correct for this ambiguity by accounting for changes in the amount of error over the length of a trial. The approaches included using correlation to quantify the relationship between the stimulus and response independently of the magnitude of error or by calculating the deviation in time between paired samples from participant responses and the stimuli (Böttcher et al., 2023; Yang et al., 2017). Our task accounts for the temporal errors using a different approach in comparison to these new analyses for the CTT, whereby two mathematical transformations are applied to the response trajectories to minimize temporal and spatial differences prior to calculating error metrics which allow for a more sensitive assessment. Specifically, Procrustes transformations ensured participants were not penalized for error in scaling, rotation, or translation (Kadmon Harpaz et al., 2014). Further, as stimuli were animated and sampled at a constant frequency, DTW transformations accounted for natural variations in movement velocity in the response trajectories as previously described (Giorgino, 2009). Following these transformations, both error for each trajectory and response velocity was determined for each trial, and velocity was accounted for in the model before making conclusions about performance. Additionally, the Procrustes analysis produces outcome variables for each transformation that can be modelled to interpret how participants are improving their performance over training.
Limitations
Given the growing number of paradigms in the field of motor learning, it is vital to ensure that tasks being developed need to add theoretical value to the literature while meeting standards for accuracy and replicability (Ranganathan et al., 2021). Ranganathan et al., 2021 provides a set of guidelines that should be considered when developing paradigms. These guidelines are grouped into three sections (design, data collection/analysis and dissemination) that are further divided into nine constructs. Of these constructs, the task described herein potentially falls short of two of these constructs: degree of relevance and measurement issues specific to learning. Degree of relevance is a construct that describes how well a paradigm captures its core construct of interest and how well the findings might generalize to similar tasks. Given that eight participants were able to correctly identify both repeating trajectories and did not express implicit skill acquisition, it could be interpreted that this task has an issue measuring its core construct, implicit learning. However, the rates of explicit learning noted for this task are similar to those observed for the SRTT and CTT highlighting the need for further task optimization when investigating implicit learning (Ewolds et al., 2021; Vandenbossche et al., 2014). Interestingly, we did not observe an effect of learning type on task performance between the repeated trajectories (explicit vs. implicit). While investigating these differences is out of the scope of the current investigation, this finding is in line with Sekiya (2006), who demonstrated equivalent learning under implicit and explicit conditions via the CTT. Furthermore, while the task described in this study and the CTT require movement that is more kinematically complex and less familiar than the movement used in an SSRT, these laboratory-based tasks are not the most naturalistic movements. To generalize to a broader range of settings, future study designs should consider using tasks that require multiple limbs, high degrees of coordination, the involvement of locomotion or interactions with a dynamic environment to quantify implicit learning.
A potential second shortcoming of the task in relation to the guidelines of Ranganathan et al., 2021 is that the results highlight a measurement issue related to learning whereby there is a floor effect in the data as the rate of learning is too fast (Table 2 and Fig. 7). These floor effects have also been reported in the CTT where Broeker et al., 2021 also found that participant responses plateaued at an early stage of the experiment. To address this is issue, the task needs to be further optimized by manipulating both the complexity of repeated stimuli and the velocity at which they are presented, which is a unique feature of our task. Based on the current results, it would be imperative to increase task difficulty by either removing the slower animation velocities or increasing the complexity of the trajectories to slow the rate of learning.
Conclusion
The current study validates the use of a task in probing implicit learning of complex movements, by demonstrating improvements in performance to repeated trajectories of an upper-limb task regardless of participant’s level of recognition of the trajectories. In alignment with previous investigations of implicit motor learning using the SRTT and CTT, a reduction in error was observed for the implicitly learned repeated trajectories relative to the random trajectories (Schwarb & Schumacher, 2012; Wulf & Schmidt, 1997). However, the structure of this task ensured that no extraneous confounds due to time-on-task were introduced and allowed for the precise control of task difficulty across trajectory types, by altering the stimulus animation velocity and trajectory complexity. In addition, assessing both stimulus animation velocity and error, calculated following mathematical transformations of the response using DTW and Procrustes analyses, allowed for a nuanced analysis of performance. The advantages of this task also lend themselves to clinical populations where an impact of task on implicit learning has been noted, but the effects are not well understood since the majority of research in these populations has been completed using SRTTs (Kal et al., 2016). A small number of studies in clinical populations have been done using more ecologically valid complex movements including balance tests, walking paradigms and the CTT, albeit with varying results (Boyd & Winstein, 2004; Jie et al., 2021; Orrell et al., 2006). The paradigm highlighted in this study would further our understanding of implicit learning of complex movements in clinical populations by providing a means to test implicit learning that is self-paced (in comparison to the CTT) which may account for slowed perceptual and motor processes in the affected populations (Godefroy et al., 2010). While the task parameters (stimulus animation velocity and trajectory complexity) require optimization to eliminate the floor effect in the data and identify differences in performance between implicit and explicit learning, findings suggest the present task has promising for investigating implicit learning of a complex motor skill. Future research should systematically manipulate complexity, animation velocity, and ratios of random to repeated trajectories to further determine the ideal parameters to probe implicit motor learning.
Material and code availability
The study’s data and analysis code is available at https://osf.io/v45pq/ (https://doi.org/10.17605/OSF.IO/V45PQ) and the experimental code is available at https://github.com/LBRF-Projects/Implicit_CME_Solomon2023_Experiment.
References
Böttcher, A., Adelhöfer, N., Wilken, S., Raab, M., Hoffmann, S., & Beste, C. (2023). TRACK—a new algorithm and open-source tool for the analysis of pursuit-tracking sensorimotor integration processes. Behavior Research Methods. https://doi.org/10.3758/s13428-023-02065-w
Boyd, L. A., & Winstein, C. J. (2004). Providing explicit information disrupts implicit motor learning after basal ganglia stroke. Learning and Memory, 11(4), 388–396. https://doi.org/10.1101/lm.80104
Broeker, L., Ewolds, H. E., de Oliveira, R. F., Künzell, S., & Raab, M. (2020). Additive effects of prior knowledge and predictive visual information in improving continuous tracking performance. Journal of Cognition, 3(1), 40. https://doi.org/10.5334/joc.130
Broeker, L., Ewolds, H., de Oliveira, R. F., Künzell, S., & Raab, M. (2021). The impact of predictability on dual-task performance and implications for resource-sharing accounts. Cognitive Research Principles and Implications, 6(1), 1. https://doi.org/10.1186/s41235-020-00267-w
Brown, S. H., & Cooke, J. D. (1990). Movement-related phasic muscle activation. I. Relations with temporal profile of movement. Journal of Neurophysiology, 63(3), 455–464. https://doi.org/10.1152/jn.1990.63.3.455
Bürkner, P.-C. (2017). brms : an R package for bayesian multilevel models using Stan. Journal of Statistical Software, 80, 1.
Chambaron, S., Ginhac, D., Ferrel-Chapus, C., & Perruchet, P. (2005). Implicit learning of a repeated segment in continuous tracking: A reappraisal. Quarterly Journal of Experimental Psychology, 59(5), 845–854. https://doi.org/10.1080/17470210500198585
Cooke, J. D., & Brown, S. H. (1994). Movement-related phasic muscle activation: III. The duration of phasic agonist activity initiating movement. Experimental Brain Research, 99(3), 473–482. https://doi.org/10.1007/bf00228984
de Oliveira, R. F., Raab, M., Hegele, M., & Schorer, J. (2017). Task integration facilitates multitasking. Frontiers in Psychology, 8, 398. https://doi.org/10.3389/fpsyg.2017.00398
Destrebecqz, A., & Cleeremans, A. (2001). Can sequence learning be implicit? New evidence with the process dissociation procedure. Psychonomic Bulletin and Review, 8(2), 343–350. https://doi.org/10.3758/bf03196171
Dienes, Z., Broadbent, D., & Berry, D. (1991). Implicit and explicit knowledge bases in artificial grammar learning. Journal of Experimental Psychology: Learning, Memory, and Cognition, 17(5), 875–887. https://doi.org/10.1037/0278-7393.17.5.875
Ewolds, H. E., Bröker, L., de Oliveira, R. F., Raab, M., & Künzell, S. (2017). Implicit and explicit knowledge both improve dual task performance in a continuous pursuit tracking task. Frontiers in Psychology, 8, 2241. https://doi.org/10.3389/fpsyg.2017.02241
Ewolds, H., Broeker, L., de Oliveira, R. F., Raab, M., & Künzell, S. (2021). No impact of instructions and feedback on task integration in motor learning. Memory and Cognition, 49(2), 340–349. https://doi.org/10.3758/s13421-020-01094-6
Giorgino, T. (2009). Computing and visualizing dynamic time warping alignments in R : the dtw package. Journal of Statistical Software, 31, 7.
Godefroy, O., Spagnolo, S., Roussel, M., & Boucart, M. (2010). Stroke and action slowing: mechanisms, determinants and prognosis value. Cerebrovascular Diseases, 29(5), 508–514. https://doi.org/10.1159/000297968
Goodall, C. (1991). Procrustes methods in the statistical analysis of shape. Journal of the Royal Statistical Society: Series B (methodological), 53, 2.
Heathcote, A., Brown, S., & Mewhort, D. J. K. (2000). The power law repealed: The case for an exponential law of practice. Psychonomic Bulletin and Review, 7(2), 185–207. https://doi.org/10.3758/bf03212979
Ingram, T. G. J., Solomon, J. P., Westwood, D. A., & Boe, S. G. (2019). Movement related sensory feedback is not necessary for learning to execute a motor skill. Behavioural Brain Research, 359, 135–142. https://doi.org/10.1016/j.bbr.2018.10.030
Jamieson, R. K., Vokey, J. R., & Mewhort, D. J. K. (2017). Implicit learning is order dependent. Psychological Research Psychologische Forschung, 81(1), 204–218. https://doi.org/10.1007/s00426-015-0715-4
Jie, L.-J., Kleynen, M., Meijer, K., Beurskens, A., & Braun, S. (2021). Implicit and explicit motor learning interventions have similar effects on walking speed in people after stroke: a randomized controlled trial. Physical Therapy, 101(5), pzab017. https://doi.org/10.1093/ptj/pzab017
Jiménez, L., & Vázquez, G. A. (2005). Sequence learning under dual-task conditions: Alternatives to a resource-based account. Psychological Research Psychologische Forschung, 69(5–6), 352–368. https://doi.org/10.1007/s00426-004-0210-9
Kadmon Harpaz, N., Flash, T., & Dinstein, I. (2014). Scale-invariant movement encoding in the human motor system. Neuron, 81(2), 452–462. https://doi.org/10.1016/j.neuron.2013.10.058
Kal, E., Winters, M., van der Kamp, J., Houdijk, H., Groet, E., van Bennekom, C., & Scherder, E. (2016). Is implicit motor learning preserved after stroke? A systematic review with meta-analysis. PLoS ONE. https://doi.org/10.1371/journal.pone.0166376
Kaufman, S. B., DeYoung, C. G., Gray, J. R., Jiménez, L., Brown, J., & Mackintosh, N. (2010). Implicit learning as an ability. Cognition, 116(3), 321–340. https://doi.org/10.1016/j.cognition.2010.05.011
Kay, M.: tidybayes: Tidy Data and Geoms for Bayesian Models (v3.0.4). http://mjskay.github.io/tidybayes/ (2023)
Kraeutner, S. N., MacKenzie, L. A., Westwood, D. A., & Boe, S. G. (2016). Characterizing skill acquisition through motor imagery with no prior physical practice. Journal of Experimental Psychology: Human Perception and Performance, 42(2), 257–265. https://doi.org/10.1037/xhp0000148
Kruschke, J. K. (2021). Bayesian analysis reporting guidelines. Nature Human Behaviour, 5(10), 1282–1291. https://doi.org/10.1038/s41562-021-01177-7
Künzell, S., Sießmeir, D., & Ewolds, H. (2016). Validation of the continuous tracking paradigm for studying implicit motor learning. Experimental Psychology, 63(6), 318–325. https://doi.org/10.1027/1618-3169/a000343
Lang, A., Gapenne, O., Aubert, D., & Ferrel-Chapus, C. (2013). Implicit sequence learning in a continuous pursuit-tracking task. Psychological Research Psychologische Forschung, 77(5), 517–527. https://doi.org/10.1007/s00426-012-0460-x
Lenth, R. V., Bolker, B., Buerkner, P., Giné-Vázquez, I., Herve, M., Jung, M., Love, J., Miguez, F., Riebl, H., & Singmann, H. (2023). Estimated marginal means, aka least-squares means. https://github.com/rvlenth/emmeans
Lüdecke, D., Ben-Shachar, M., Patil, I., & Makowski, D. (2020). Extracting, computing and exploring the parameters of statistical models using R. Journal of Open Source Software, 5(53), 2445.
Maresch, J., Mudrik, L., & Donchin, O. (2021). Measures of explicit and implicit in motor learning: What we know and what we don’t. Neuroscience and Biobehavioral Reviews, 128, 558–568. https://doi.org/10.1016/j.neubiorev.2021.06.037
Nissen, M. J., & Bullemer, P. (1987). Attentional requirements of learning: Evidence from performance measures. Cognitive Psychology, 19(1), 1–32. https://doi.org/10.1016/0010-0285(87)90002-8
Oksanen, J., Simpson, G. L., Blanchet, F. G., Kindt, R., Legendre, P., Minchin, P. R., O’Hara, R. B., Solymos, P., Stevens, M. H. H., Szoecs, E., Wagner, H., Barbour, M., Bedward, M., Bolker, B., Borcard, D., Carvalho, G., Chirico, M., Caceres, M. D., Durand, S., Weedon, J. (2023). vegan: community ecology package R package version 2.6–4. https://github.com/vegandevs/vegan
Oldfield, R. (1971). The assessment and analysis of handedness: the Edinburgh inventory. Neuropsychologia, 9.
Orrell, A. J., Eves, F. F., & Masters, R. S. W. (2006). Motor learning of a dynamic balancing task after stroke: Implicit implications for stroke rehabilitation. Physical Therapy, 86(3), 369–380.
Pew, R. W. (1974). Levels of analysis in motor control. Brain Research, 71(2–3), 393–400. https://doi.org/10.1016/0006-8993(74)90983-4
Pincus, S. M. (1991). Approximate entropy as a measure of system complexity. Proceedings of the National Academy of Sciences, 88(6), 2297–2301. https://doi.org/10.1073/pnas.88.6.2297
Ranganathan, R., Tomlinson, A. D., Lokesh, R., Lin, T.-H., & Patel, P. (2021). A tale of too many tasks: Task fragmentation in motor learning and a call for model task paradigms. Experimental Brain Research, 239(1), 1–19. https://doi.org/10.1007/s00221-020-05908-6
Robertson, E. M. (2007). The serial reaction time task: implicit motor skill learning? Journal of Neuroscience, 27(38), 10073–10075. https://doi.org/10.1523/jneurosci.2747-07.2007
Rohrmeier, M., & Rebuschat, P. (2012). Implicit learning and acquisition of music. Topics in Cognitive Science, 4(4), 525–553. https://doi.org/10.1111/j.1756-8765.2012.01223.x
Sævland, W., & Norman, E. (2016). Studying different tasks of implicit learning across multiple test sessions conducted on the web. Frontiers in Psychology, 7, 808. https://doi.org/10.3389/fpsyg.2016.00808
Sanchez, D. J., & Reber, P. J. (2012). Operating characteristics of the implicit learning system supporting serial interception sequence learning. Journal of Experimental Psychology: Human Perception and Performance, 38(2), 439–452. https://doi.org/10.1037/a0026347
Schumacher, E. H., & Schwarb, H. (2009). Parallel response selection disrupts sequence learning under dual-task conditions. Journal of Experimental Psychology: General, 138(2), 270–290. https://doi.org/10.1037/a0015378
Schvaneveldt, R. W., & Gomez, R. L. (1998). Attention and probabilistic sequence learning. Psychological Research Psychologische Forschung, 61(3), 175–190. https://doi.org/10.1007/s004260050023
Schwarb, H., & Schumacher, E. H. (2012). Generalized lessons about sequence learning from the study of the serial reaction time task. Advances in Cognitive Psychology, 8(2), 165–178. https://doi.org/10.2478/v10053-008-0113-1
Sekiya, H. (2006). Contextual interference in implicit and explicit motor learning. Perceptual and Motor Skills, 103(2), 333–343. https://doi.org/10.2466/pms.103.2.333-343
Siengsukon, C. F., & Boyd, L. A. (2008). Sleep enhances implicit motor skill learning in individuals poststroke. Topics in Stroke Rehabilitation, 15(1), 1–12. https://doi.org/10.1310/tsr1501-1
Vandenbossche, J., Coomans, D., Homblé, K., & Deroost, N. (2014). The effect of cognitive aging on implicit sequence learning and dual tasking. Frontiers in Psychology, 5, 154. https://doi.org/10.3389/fpsyg.2014.00154
Wickham, H.: modelr: modelling functions that work with the pipe. https://github.com/tidyverse/modelr (2023)
Wilkinson, L., & Shanks, D. R. (2004). Intentional control and implicit sequence learning. Journal of Experimental Psychology: Learning, Memory, and Cognition, 30(2), 354. https://doi.org/10.1037/0278-7393.30.2.354
Wong, A. L., & Krakauer, J. W. (2019). Why are sequence representations in primary motor cortex so elusive? Neuron, 103(6), 956–958. https://doi.org/10.1016/j.neuron.2019.09.011
Wong, A. L., Goldsmith, J., & Krakauer, J. W. (2016). A motor planning stage represents the shape of upcoming movement trajectories. Journal of Neurophysiology, 116(2), 296–305. https://doi.org/10.1152/jn.01064.2015
Wulf, G., & Schmidt, R. A. (1997). Variability of practice and implicit motor learning. Journal of Experimental Psychology: Learning, Memory, and Cognition, 23(4), 987–1006. https://doi.org/10.1037/0278-7393.23.4.987
Wulf, G., & Shea, C. H. (2002). Principles derived from the study of simple skills do not generalize to complex skill learning. Psychonomic Bulletin and Review, 9(2), 185–211. https://doi.org/10.3758/bf03196276
Yang, L., Wan, F., Nan, W., Zhu, F., & Hu, Y. (2017). Reliable detection of implicit waveform-specific learning in continuous tracking task paradigm. Scientific Reports, 7(1), 12333. https://doi.org/10.1038/s41598-017-11977-5
Yentes, J. M., Hunt, N., Schmid, K. K., Kaipust, J. P., McGrath, D., & Stergiou, N. (2013). The appropriate use of approximate entropy and sample entropy with short data sets. Annals of Biomedical Engineering, 41(2), 349–365. https://doi.org/10.1007/s10439-012-0668-3
Zhu, F. F., Poolton, J. M., Maxwell, J. P., Fan, J. K. M., Leung, G. K. K., & Masters, R. S. W. (2014). Refining the continuous tracking paradigm to investigate implicit motor learning. Experimental Psychology, 61(3), 196–204. https://doi.org/10.1027/1618-3169/a000239
Funding
This study was funded by a Natural Sciences and Engineering Research Council of Canada Discovery Grant (RGPIN/04900-2015) awarded to Dr. S.G. Boe.
Author information
Authors and Affiliations
Contributions
Jack Solomon is currently a member of Biomedical Physiology and Kinesiology, Faculty of Science, Simon Fraser University (ORCiD: 0000-0001-9956-2916): formal analysis, methodology, software, visualization, writing—original draft, writing—review and editing. Austin Hurst (ORCiD: 0000-0002-0219-4131): methodology, software, formal analysis. Sarah Kraeutner (ORCiD: 0000-0002-6552-6682): conceptualization, data curation, investigation, methodology, project administration, writing—original draft, writing—review and editing. Tony Ingram (ORCiD: 0000-0003-1213-7920): conceptualization, methodology, software, writing—review and editing. Shaun Boe (ORCiD: 0000-0001-7477-0049): conceptualization, funding acquisition, project administration, supervision, writing—review and editing.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Ethical approval
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki Declaration and its later amendments or comparable ethical standards. The study was approved by the Dalhousie University Health Sciences research ethics board (REB No: REB 2017-4101).
Consent to participate
Informed consent was obtained from all individual participants included in the study.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Jack, P.S., Austin, J.H., Sarah, N.K. et al. A kinematically complex multi-articular motor skill for investigating implicit motor learning. Psychological Research (2024). https://doi.org/10.1007/s00426-024-01987-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00426-024-01987-0