
Abstract
Recent research on time-based expectancy has shown that humans base their expectancies for responses on representations of temporal relations (e.g., shorter vs. longer duration), rather than on representations of absolute durations (e.g., 500 vs. 1000 ms). In the present study, we investigated whether this holds also true for time-based expectancy of tasks instead of responses. Using a combination of the time-event correlation paradigm and the standard task-switching paradigm, participants learned to associate two different time intervals with two different tasks in a learning phase. In a test phase, the two intervals were either globally prolonged (Experiment 1), or shortened (Experiment 2), and they were no longer predictive for the upcoming task. In both experiments, performance in the test phase was better when expectancy had been defined in relative terms and worse when expectancy had been defined in absolute terms. We conclude that time-based task expectancy employs a relative, rather than an absolute, representation of time. Humans seem to be able to flexibly transfer their time-based task expectancies between different global timing regimes. This finding is of importance not only for our basic understanding of cognitive mechanisms underlying time-based task expectancy. For human–machine applications, these results mean that adaptation to predictive delay structures in interfaces survives globally speeding up or slowing down of delays due to different transmission rates.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
During the past 10 years, research in the field of timing and time perception has substantially increased in behavioral sciences as well as in neuroscience (Merchant, & de Lafuente, 2015; Medina, Wong, Diaz, & Colonius, 2015; Wittmann, 2013; for reviews, see Block, & Gruber, 2014; Block, & Grondin, 2014). One of the most intensively investigated topics in the field of timing research is the formation of temporal expectancies (e.g., Thomaschke, Wagener, Kiesel, & Hoffmann, 2011b; for a review, see Thomaschke, & Dreisbach, 2015). Whenever environmental events are temporally predictable, the cognitive ability to form temporal expectancies becomes relevant for informing anticipatory behavior. Temporal expectancy can support anticipatory behavior in basically two different ways: time expectancy and time-based expectancy. Whereas time expectancy means anticipating when something will happen, time-based expectancy means anticipating what will happen at a certain point in time. Recently, it could be shown that not only simple stimulus–response events can be expected based on time, but also more complex tasks (Aufschnaiter, Kiesel, Dreisbach, Wenke, & Thomaschke, 2017). When different tasks depend on one technical parameter, such as, for example, Web-based computing tasks depend on data transmission rate, pre-task delays are often globally shortened or lengthened. In global temporal changes, the temporal relation between events remains stable, e.g., successful loading is still faster than error messages, even when the whole computational system changes its speed. Thus, relative time-based expectancies would still make correct predictions after global temporal changes. Hence, a question of high practical importance is whether time-based task expectancy, once built, is relative, and, thus, temporally flexible. The present study investigates, if time-based task expectancy remains intact, when the timing environment globally slows down (Experiment 1) or speeds up (Experiment 2), or if it is specific to exactly the intervals it had been acquired with.
Time-based expectancy for stimulus–response events
As already stated above, temporal expectancy can support the anticipatory behavior in two different ways: time-based expectancy and time expectancy. Time expectancy is conceptually independent from time-based expectancy and is not the focus of the present study, but it will be briefly discussed below, because it also occurs, as a side effect, in the time-event correlation paradigm employed in the reported experiments.
Time-based expectancy, which is the focus of the present study, means expecting a certain event conditional upon a point in time. Previous research has shown that when time predicts an upcoming stimulus–response event, humans form time-based expectancies (Thomaschke, Kunchulia, & Dreisbach, 2015). Time-based expectancy is typically investigated by applying a specific variant of the foreperiod paradigm (Schröter, Birngruber, Bratzke, Miller, & Ulrich, 2015), the so-called time-event correlation paradigm, which was initially introduced by Wagener, & Hoffmann (2010). In this paradigm, two targets and two intervals occur with equal probability, but the combinations of target and interval differ in frequency. One target is frequently (80%) combined with the shorter interval, while the other target is frequently (80%) combined with the longer interval. Time-based expectancy typically leads to faster responses for frequent combinations of interval and target, compared to infrequent combinations of interval and target (Wagener, & Hoffmann, 2010; Thomaschke, et al., 2011b). Please note that it is not yet clear if the effect of time-based expectancy relies on an impairment of performance in unexpected conditions, or rather on an improvement of performance in expected conditions. In all previous studies, time-based expectancy is defined as the relative performance difference in expected conditions compared to unexpected conditions.
Time-based expectancy has already been shown for motor responses (Thomaschke, & Dreisbach, 2013; Volberg, & Thomaschke, 2017), response conflict (Wendt, & Kiesel, 2011), language processing (MacGregor, Corley, & Donaldson, 2010; Roberts, & Francis, 2013; Roberts, Margutti, & Tarkano, 2011; Watanabe, Hirose, Den, & Minematsu, 2008), stimulus form (Thomaschke, Hoffmann, Haering, & Kiesel, 2016), and stimulus location (Rieth, & Huber, 2013; see Thomaschke, & Dreisbach, 2015, for a review). Moreover, computer users seem to predict upcoming events based on preceding system response delays (Shahar, Meyer, Hildebrand, & Rafaely, 2012; Thomaschke, & Haering, 2014).
Time expectancy
In contrast to time-based expectancy, time expectancy can be defined as a prediction of the duration of an interval prior to an event (Thomaschke et al., 2015). Thus, time expectancy means expecting when something will happen, independently from what will happen at this point in time. As already mentioned above, time expectancy is not the focus of the present study, but as it occurs as a side effect in the time-event-correlation paradigm, which is employed in the present study, it will be briefly discussed here. Time expectancy has mostly been investigated using the foreperiod paradigm, in which the duration between warning signal and target stimulus (the foreperiod) is manipulated (e.g., Los, & Agter, 2005; Steinborn, Rolke, Bratzke, & Ulrich, 2008, Steinborn, & Langner, 2012). A main finding is that response time monotonously decreases with increasing foreperiod, when foreperiod duration is varied randomly across trials (Los, Kruijne, & Meeter, 2016; Steinborn, & Langner, 2011; Steinborn, Rolke, Bratzke, & Ulrich, 2010). The variable-FP paradigm, where the FP duration varies randomly within a block of trials, induces a phenomenon termed “occurrence uncertainty”, while the constant-FP paradigm, where the FP duration is held constant, and thus is fully predictable within a block of trials, is assumed to induce a phenomenon termed “time uncertainty” (cf. Klemmer, 1956; Näätänen, 1972).
Although the above-described time-event correlation paradigm (Wagener, & Hoffmann, 2010) is actually designed to manipulate time-based event predictability, it also necessarily involves time expectancy due to occurrence uncertainty, because time expectancy is always higher at the longer than at the shorter interval. However, in previous studies, the effects of time expectancy typically did not interact with the effects of time-based event expectancy (see Thomaschke, & Dreisbach, 2015, for a review). This means that time-based expectancy is usually present at the short as well as at the long interval. Consequently, in the present study, it is not predicted that effects of time-based expectancy interact with effects of time expectancy.
Time-based expectancy for tasks
Recently, it could be shown that not only events in single-task scenarios (see above) but also a task itself can be expected based on time in a task-switching scenario (Aufschnaiter et al., 2017). For example, the duration of the system response delay after clicking on a web link is highly informative about which task will be required next. During the first seconds of the delay, it is likely that the page will load successfully, requiring one to navigate on the page. When, on the contrary, the delay takes longer, it becomes increasingly likely that an error message occurs instead, requiring one to search for another link (Thomaschke et al., 2015). In the above-mentioned example from the field of human–computer interaction, the system response delay is highly predictive of the upcoming task. Time-based expectancy for tasks is investigated by applying a combination of the above-mentioned time-event correlation paradigm (Wagener, & Hoffmann, 2010) and the standard task-switching paradigm (for a review, see Kiesel et al., 2010). The study by Aufschnaiter et al. (2017) showed for the first time that participants benefit not only from long preparation intervals, but that the predictive value of these intervals’ duration plays a crucial role for the adjustment of anticipatory cognitive control in task-switching. However, the cognitive processes underlying time-based expectancy in task-switching are not yet clear. For example, it is not yet clear how time is represented when tasks are expected based on time.
Time representation involved in time-based expectancy
Time can be represented in basically two different forms in the human brain—absolute or relative. Absolute representation of time stands for a representation of an exact amount of time, such as 200 ms. Relative representation of time means a representation compared to other timing instances, for example the shorter of two temporal durations. There is evidence for both types of time representations. For example, Thomaschke et al. (2015) argued that duration specificity can be interpreted as evidence for absolute durations. In this context, previous research has demonstrated that time-based event expectancy is relatively stable after it has been acquired, even when events are no longer predictable by time (Thomaschke, & Dreisbach, 2015; Rieth, & Huber, 2013). In contrast, transfer of temporal discrimination skills from one timing range to another can be interpreted as evidence for relative representations. There are studies which showed evidence for a relational coding of duration estimation in animals (Zentall, Weaver, & Clement, 2004), as well as in humans (Molet, & Zentall, 2008).
Current theories on time-based expectancy assume that the correlation between interval duration and event is learned by an associative learning mechanism (Thomaschke, Kiesel, & Hoffmann, 2011a; Thomaschke, & Dreisbach, 2015; Los, Kruijne, & Meeter, 2014). Recently, Thomaschke and Dreisbach (2015) developed a model, which explains the time-based expectancy effect in humans, and which is basically a combination of Machado’s (1997) and Los, Knol and Boers (2001) accounts of temporal associative learning (for detailed model description, see Thomaschke, & Dreisbach, 2015). Thomaschke and Dreisbach (2015) assume that the onset of the warning interval in the above-described time-event correlation paradigm triggers a cascade of temporal states (i.e., successive neural activation states; see Fig. 1). When a certain cognitive requirement, like executing Task A, occurs shortly after a specific temporal state has been passed, this involves a strengthening of the connection between this temporal state and the neural population, which generates expectancy for this specific requirement (e.g., Los et al., 2001). Yet, we currently do not know whether these temporal states are connected to the expectancy-generating neural populations via mediating mappings to categorical representations of time (e.g., short vs. long), which would imply a relative representation of time (cf. Fig. 1a) or directly as absolute representations of time (cf. Fig. 1b).

Illustration of the temporal expectancy model and possible underlying temporal representations: time markers (gray dotted ovals) are connected via weighted associations (arrows) with expectancy-generating neural systems for both task expectancies. In the figure, temporal state t1 is associated with expectancy for task A, and t3 is associated with expectancy for task B (thick arrows). However, in a, the temporal states are connected to the expectancy-generating neural populations via mediating mappings to categorial representations of time (i.e., relative time representation). In b, the temporal states, as absolute representations of time, are directly connected to the expectancy-generating neural populations
Recently, Thomaschke et al. (2015) demonstrated that time-based expectancies for simple stimulus–response events are likely based on relative, not on absolute, representations of time (cf. Fig. 1a). However, currently, it is not yet known, whether time-based expectancy for tasks relies on the same type of time representation as time-based expectancy for stimulus–response events, namely on a relative representation of time.
Remember the above-mentioned example from the field of human–machine interaction. In this context, the question, if time-based expectancy for tasks, once built, is temporally flexible, is of high practical importance. If humans base their task expectations on relative representations of time rather than on absolute durations, it should be possible to preserve these time-based task expectancies. Preserving time-based task expectancies should thus also be possible when the whole technical device is sped up or slowed down. This is typically the case when data transmission rate changes in the Internet-based computing.
Thus, the following question emerges: does time-based expectancy for tasks remain intact, when the timing environment globally speeds up or slows down? Or is time-based task expectancy rather specific to exactly the intervals with which it had been previously acquired? The present study aims to answer these questions by exploring, whether time-based task expectancy employs relative or absolute representations of time; to put it in more precise terms, whether tasks are expected at relative times (e.g., after the shorter one of two intervals), or at absolute times (e.g., after 500 ms). When tasks are expected based on relative intervals, this expectancy will still be effective when the intervals are globally lengthened or shortened. This would mean that a flexible transfer of time-based task expectancy across different global timing regimes is possible. When tasks are, on the contrary, expected based on absolute time intervals, the expectancy would be temporally specific to the intervals of the learning phase. Consequently, no flexible transfer of time-based task expectancy would be possible across globally slowed down or sped up timing regimes.
The present study aims at determining which type of representation—absolute or relative—is typically involved when participants form time-based task expectancies in the basic paradigm employed in the study by Aufschnaiter et al. (2017). Following the design of the experiments in the study by Thomaschke et al. (2015), we used three intervals (short, medium, and long) and two phases (learning and test phase) in the present study. The medium interval appeared in both phases. The short and the long interval, on the other hand, each appeared in only one of the phases; either short in learning and long in test (Experiment 1), or long in learning and short in test (Experiment 2). In the learning phase, the interval predicted the task with 90% validity, whereas in the test phase, the duration of the interval no longer predicted the task in the current trial. With absolute timing, transfer would only occur for the medium interval, because the other interval changes from learning to test phase. Therefore, at the medium interval, participants should expect the same task in the test phase as in the learning phase. Thus, in trials with the medium interval, they should show a better performance for the task which had been associated with the medium interval in the learning phase compared to the task which had been associated to the short interval in the learning phase. With relative timing, on the contrary, transfer would occur from the relative shorter interval in the learning phase to the relative shorter interval in the test phase, as well as from the relative longer interval in the learning phase to the relative longer interval in the test phase. However, for the medium interval, this would mean that one expects different tasks in the learning and in the test phase, because the medium interval changes its relative role from learning to test. Consequently, absolute and relative timing would predict opposite task expectancies for the medium interval in the test phase (see Thomaschke et al., 2015). As we coded expectancy in relative terms (a fact that we will further explain in the result section of Experiment 1), we would expect a significant expectancy effect in the test phase, if the hypothesis of a relative time representation was true. Instead, we would expect a reversed expectancy effect, if the hypothesis of an absolute time representation was true.
Experiment 1
The purposes of Experiment 1 were to investigate whether time-based task expectancy, once built, is temporally flexible and whether it remains intact, when the timing environment globally slows down, which would speak in favor of a relative representation of time. For this purpose, a standard task-switching paradigm was combined with the time-event correlation paradigm. We expected participants to build time-based task expectancies in the learning phase and to transfer these expectancies into the test phase, where the intervals were each lengthened by 500 ms.
Method
Participants
Sixty-four participants (46 females; mean age 22.84, SD 2.69, range 19–31 years; 60 right-handed) were tested in exchange for eight Euro or course credit. Participants were students from the University of Freiburg, who had normal or corrected-to-normal vision and gave their informed consent before participation. Participants were treated according to the ethical standards of the American Psychological Association.
Apparatus and stimuli
Participants responded with their left and their right index-fingers on two buttons on a serial response box (Psychology Software tools), which was centrally aligned in front of the computer screen. Target stimuli were colored numbers between 1 and 9, except 5, presented against a black background at a viewing distance of 50 cm. The size of the stimuli was approximately 8 × 5 mm. The fixation cross was the plus symbol (Arial typeface, approximately 6 × 6 mm). All stimuli were presented centrally on the screen.
Procedure
Each trial started with a blank screen for 300 ms (inter-trial interval), which was followed by the presentation of a fixation cross for a variable interval of either 500, 1000, or 1500 ms. After this warning interval, the target stimulus was presented. The order of stimuli was randomized, and each stimulus occurred with equal probability. Depending on the color (blue or orange) of the digit, participants had to complete the above-described magnitude judgement task, or the above-described parity judgement task. The mapping of colors to tasks was counterbalanced across participants. Responses were given with the same two buttons for both tasks. The mapping of responses to keys was also counterbalanced across participants. Participants were instructed to respond as fast and as correct as possible. After the detection of an error, the word Fehler! (German for “Error!”) was displayed in red on a black screen for 1500 ms. After correct responses, no explicit feedback was given.
The experiments consisted of two sessions of 30 min each, which were tested on consecutive days. The first session of the experiment was composed of four blocks: one practice block and three learning blocks. Each block comprised 120 trials. Between blocks, participants could take a break, which they could terminate individually by pressing the spacebar. The only difference between the practice block and the learning blocks was that after the detection of an error, the instruction was once again presented in silver font color on a black screen for 8000 ms in the practice block, before the next trial started with the presentation of the inter-trial-interval. In all blocks, the duration of the warning interval predicted the upcoming task in the current trial with 90% validity. One task occurred frequently after one interval, while the other task appeared frequently after the other interval. Both intervals and tasks appeared with the same overall frequencies, and the mapping of tasks to intervals was counterbalanced across participants. Participants were not informed that the warning intervals had different lengths, or that these interval lengths were correlated with the above-mentioned tasks.
The second session of the experiment consisted of five blocks: one practice block, two learning blocks, hereinafter referred to as learning phase, and two test blocks, hereinafter referred to as test phase. Each block comprised 120 trials. Between blocks, participants could again take a break, which they could terminate individually by pressing the spacebar. The difference between practice block and learning blocks was the same as in the first session. The mapping of tasks to intervals, as well as the mapping of responses to keys in the learning phase of the second session resembled the first session. The difference between learning phase and test phase in the second session was that the absolute duration of the intervals of the learning phase was lengthened by 500 ms each. This means that the short and the medium interval from the learning phase changed to the medium and the long interval in the test phase. Furthermore, in the test phase, the duration of the warning interval no longer predicted the task in the current trial. This means that both tasks occurred equally often after both intervals (see Table 1). Both intervals and tasks appeared again with same overall frequencies. Participants were not informed about the change of the lengths of the warning intervals in the test phase. After the second session of the experiment, participants were orally asked by the experimenter if they had noticed any temporal regularity in the experiment.
Results
Following earlier studies on time-based expectancy, we analyzed only data of the second session (Thomaschke, & Dreisbach, 2013). Data from the practice block, from the first three trials of each learning and test block, as well as trials with number repetitions and trials following an error trial were excluded from analyses. In addition, we excluded trials with RTs <100 ms from analyses.
We analyzed the learning phase and the test phase separately. For each factor combination, each block, and each participant, we removed RTs with a deviation of more than 3 SD from the respective mean RT before RT analyses (Bush, Hess, & Wolford, 1993). Furthermore, trials with errors were removed from the RT analyses.
In addition to the factor expectancy, we added the factors transition and interval to our repeated-measures ANOVAs. Some other, though non-temporal, task predictability effects have turned out to be transition-specific (e.g., Rogers, & Monsell, 1995), while others have not (e.g., Gotler, Meiran, & Tzelgov, 2003). Furthermore, in some studies on time-based expectancy, the effect of time-based expectancy could only be observed depending on the duration of the interval (Thomaschke et al., 2015). Therefore, we could not rule out the possibility that time-based expectancy could be modulated by the factors transition and/or interval in the present study, although we did not predict any modulations of the expectancy effect by these factors. Thus, for the learning blocks, three-factor repeated-measures ANOVAs with the factors interval (500 vs. 1000 ms), transition (switch vs. repetition), and expectancy of interval—task combination (expected vs. unexpected) were conducted separately for error rates and RTs. For the test blocks, we conducted three-factor repeated-measures ANOVAs with the factors interval (1000 vs. 1500 ms), transition (switch vs. repetition), and expectancy of interval—task combination (expected vs. unexpected), separately, for error rates and RTs. Note that for the test blocks, “expectancy” was coded to the current interval-task combination’s previous frequency (i.e., whether it had been frequent in the learning phase) and that this coding was done in relative terms. This means, a combination of the current task with the currently relative shorter interval was coded as “expected” when the current task had been expected after the previously relative shorter interval in the learning phase.
Learning phase
For mean reaction times and SD of each factor combination, see Table 2. With regard to RTs, the two main effects for interval and transition were significant. Responses were faster after medium (M 872 ms, SD 195) than after short intervals (M 898 ms, SD 220), F (1, 63) = 4.15, p = .046, η 2p = .062, and responses to task repetitions (M 835 ms, SD 199) were faster than to task switches (M 935 ms, SD 226), F (1, 63) = 32.16, p < .001, η 2p = .338. The main effect for expectancy did not gain significance F (1, 63) = 1.82, p = .182, η 2p = .028. The interaction between transition and expectancy was significant, F (1, 63) = 8.27, p = .005, η 2p = .116. Furthermore, there was a marginally significant interaction between interval, transition, and expectancy, F (1, 63) = 3.70, p = .059, η 2p = .055. No other interaction gained significance. For a complete overview of the statistical results of the reported ANOVA, see Table 3.
Based on the reported three-factor-interaction, we conducted a two-factor repeated-measures ANOVA with the factors transition (switch vs. repetition) and expectancy of interval—task combination (expected vs. unexpected), separately, for the short interval of 500 ms and for the medium interval of 1000 ms. For the short interval, the main effect for transition, F (1, 63) = 23.32, p < .001, η 2p = .270, was significant, which meant that RTs were faster in trials with task repetitions (M 842 ms, SD 225), than in trials with task switches (M 954 ms, SD 250). The main effect for expectancy was not significant, F (1, 63) = 1.51, p = .223, η 2p = .023. Furthermore, the interaction between transition and expectancy gained significance, F (1, 63) = 7.84, p = .007, η 2p = .111. For the medium interval, only the main effect for transition gained significance. RTs were significantly faster in trials with task repetitions (M 828 ms, SD 192), compared to trials with task switches (M 916 ms, SD 222), F (1, 63) = 23.22, p < .001, η 2p = .269. The main effect for expectancy was not significant, F < 1. The interaction between transition and expectancy was also not significant, F < 1.
With regard to error rates, the main effect of interval was significant. Error rates were significantly lower in trials with the medium interval of 1000 ms (M 1.83, SD 2.32) compared to trials with the short interval of 500 ms (M 3.35, SD 3.76), F (1, 63) = 12.67, p = .001, η 2p = .167. Furthermore, there was a marginally significant interaction between interval and expectancy, F (1, 63) = 3.74, p = .058, η 2p = .056. No other main effect or interaction was significant (see Fig. 2a).

Main results of Experiment 1: in a mean reaction times (RTs in ms; lines) and percentages of errors (PEs in %; bars) of the learning phase depending on expectancy of interval–task combination are displayed separately for task transition (task switches vs. task repetitions) and interval duration (500 vs. 1000 ms). Error bars represent 1 standard error of the mean. In b mean reaction times (RTs in ms; lines) and percentages of errors (PEs in %; bars) of the test phase, depending on expectancy of interval–task combination (in relative terms) are displayed separately for transition (task switches vs. task repetitions) and interval duration (1000 vs. 1500 ms). Error bars represent 1 standard error of the mean
Test phase
For mean reaction times and SD of each factor combination, see Table 4. With regard to RTs, the main effect for transition was significant. Responses were significantly faster for task repetitions (M 827 ms, SD 182) than for task switches (M 958 ms, SD 280), F (1, 63) = 37.21, p < .001, η 2p = .371. The main effect for expectancy was marginally significant, F (1, 63) = 3.58, p = .063, η 2p = .054. Participants responded faster in trials with expected combinations of interval and task (in relative terms) (M 885 ms, SD 218) compared to trials with unexpected combinations of interval and task (in relative terms) (M 900 ms, SD 227). Furthermore, the interaction between interval and transition was significant, F (1, 63) = 4.74, p = .033, η 2p = .070. Again, there was a significant interaction between interval, transition, and expectancy, F (1, 63) = 6.66, p = .012, η 2p = .096. No other main effect or interaction gained significance. For a complete overview of the statistical results of the reported ANOVA, see Table 3.
Based on the reported three-factor interaction, we conducted a two-factor repeated-measures ANOVA with the factors transition (switch vs. repetition) and expectancy of interval—task combination (expected vs. unexpected) separately for the medium interval of 1000 ms and for the long interval of 1500 ms. For the medium interval, the main effect for transition, F (1, 63) = 41.39, p < .001, η 2p = .397 was significant. RTs were significantly faster in trials with task repetitions (M 826 ms, SD 180) than in trials with task switches (M 971 ms, SD 277). The main effect for expectancy was not significant, F < 1. Furthermore, the interaction between transition and expectancy gained significance, F (1, 63) = 4.10, p = .047, η 2p = .061. For the long interval, the two main effects for transition and expectancy gained significance. RTs were significantly faster in trials with task repetitions (M 827 ms, SD 193), compared to trials with task switches (M 945 ms, SD 289), F (1, 63) = 27.74, p < .001, η 2p = .306, and RTs were significantly faster in trials with expected combinations of interval and task (in relative terms) (M 871 ms, SD 221) compared to unexpected combinations of interval and task (in relative terms) (M 902 ms, SD 247), F (1, 63) = 6.57, p = .013, η 2p = .094. The interaction between transition and expectancy yielded only marginal significance, F (1, 63) = 3.48, p = .067, η 2p = .052.
With regard to error rates, there were no main effects or interactions (see Fig. 2b).
Discussion
In the first experiment, we investigated if time-based task expectancy refers to representations of temporal relations rather than absolute durations, when the global temporal environment is slowed down. The results speak in favor of a relative representation of time-based task expectancy.
Importantly, the marginally significant effect for expectancy in the test phase pointed in the direction of a relative time representation. At the relatively shorter interval in the test phase, participants responded faster to the task that had been associated to the relatively shorter interval in the learning phase, compared to the task, which had been associated with the relatively longer interval in the learning phase. Likewise, at the relatively longer interval in the test phase, participants responded faster to the task that had been associated to the relatively longer interval in the learning phase, compared to the task, which had been associated with the relatively shorter interval in the learning phase. A representation of absolute durations would have predicted an effect in the opposite direction.
Please note that although there is no significant effect in the learning phase, we would not conclude that there exists no effect. It might equally well be that, due to imperfect power and large error variance based on incidentally inconsistent participant behavior, an existing effect was not visible in that condition. Although statistical power does not vary between conditions, incidental inconsistencies in participant behavior might well do. Thus, one can in principle not assume that non-significance in one condition implies non-significance in another condition, even when the underlying true population effect size would be identical. Thus, it is well in line with the logic of null-hypothesis testing to hypothesize an effect in testing, even though the effect in learning was not significant. The lack of a significant effect in learning does neither imply any likelihood of the true effect being absent in learning, nor any likelihood for the true effect being smaller in learning than in test. It might just be due to randomly fluctuating differences in error variance.
Thus, the results of Experiment 1 speak in favor of a relative representation of time-based task expectancy when the global temporal environment is slowed down. To find out if time-based task expectancy also transfers to the test phase according to a relative representation, when the global temporal environment is sped up, Experiment 2 was conducted.
Experiment 2
The purposes of Experiment 2 were to investigate whether time-based task expectancy, once built, is temporally flexible and whether it can be transferred to a global temporal environment, which is sped up. This would speak in favor of a time-based task expectancy effect, which refers to representations of temporal relations rather than absolute durations. We expected participants to build time-based task expectancies in the learning phase and to transfer these expectancies into the test phase, where the intervals were each shortened by 500 ms. This means that intervals were of medium and long length in the learning phase, while they were short and medium in the test phase.
Method
Participants
Sixty-four participants (50 females; mean age 23.45, SD 4.35, range 19–47 years; 64 right-handed) were tested in exchange for eight Euro or course credit. Participants were again students from the University of Freiburg, who had normal or corrected-to-normal vision and gave their informed consent before participation. Participants were treated according to the ethical standards of the American Psychological Association.
Apparatus, stimuli, and procedure
Apparatus, stimuli, and procedure were the same as in Experiment 1 with the exception that the learning phase now involved a medium interval of 1000 ms and a long interval of 1500 ms. Each of these two intervals predicted one of the tasks described above again with 90% validity. The test phase involved a short interval of 500 ms and a medium interval of 1000 ms, and the interval was again no longer predictive of the upcoming task in the current trial (see Table 5).
Results
Data processing and analysis were the same as in Experiment 1.
Learning phase
For mean reaction times and SD of each factor combination, see Table 6. With regard to RTs, the main effect for transition was significant. Responses to task repetitions (M 806 ms, SD 153) were faster than to task switches (M 897 ms, SD 203), F (1, 63) = 32.58, p < .001, η 2p = .341. The main effect for expectancy was marginally significant F (1, 63) = 3.87, p = .054, η 2p = .058. Responses in trials with frequent combinations of interval and task (M 840 ms, SD 175) were marginally faster compared to trials with infrequent combinations of interval and task (M 863 ms, SD 173). Furthermore, there was a significant interaction between interval, transition, and expectancy, F (1, 63) = 7.09, p = .010, η 2p = .101. No other main effect or interaction gained significance. For a complete overview of the statistical results of the reported ANOVA, see Table 7.
Based on the reported three-factor interaction, we conducted a two-factor repeated-measures ANOVA with the factors transition (switch vs. repetition) and expectancy of interval—task combination (expected vs. unexpected), separately, for the medium interval of 1000 ms and for the long interval of 1500 ms. For the medium interval, the main effect for transition, F (1, 63) = 24.11, p < .001, η 2p = .277 was significant. RTs were faster in trials with task repetitions (M 810 ms, SD 162) than in trials with task switches (M 908 ms, SD 212). The main effect for expectancy was not significant, F < 1. The interaction between transition and expectancy also did not gain significance, F (1, 63) = 2.99, p = .088, η 2p = .045. For the long interval, the two main effects of transition and expectancy were significant. Responses were significantly faster in trials with task repetitions (M 802 ms, SD 170), compared to trials with task switches (M 886 ms, SD 206), F (1, 63) = 22.86 p < .001, η 2p = .266, and responses were significantly faster in trials with expected combinations of interval and task (M 826 ms, SD 176), compared to trials with unexpected combinations of interval and task (M 862 ms, SD 202), F (1, 63) = 4.20, p = .045, η 2p = .062. Furthermore, the interaction between transition and expectancy also gained significance, F (1, 63) = 4.88, p = .031, η 2p = .072.
With regard to error rates, no main effect or interaction was significant (see Fig. 3a).

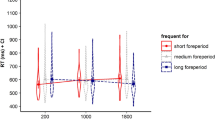
Main results of Experiment 2: in a mean reaction times (RTs in ms; lines) and percentages of errors (PEs in %; bars) of the learning phase depending on expectancy of interval–task combination are displayed separately for task transition (task switches vs. task repetitions) and interval duration (1000 vs. 1500 ms). Error bars represent 1 standard error of the mean. In b mean reaction times (RTs in ms; lines) and percentages of errors (PEs in %; bars) of the test phase depending on expectancy of interval–task combination (in relative terms) are displayed separately for task transition (task switches vs. task repetitions) and interval duration (500 vs. 1000 ms). Error bars represent 1 standard error of the mean
Test phase
For mean reaction times and SD of each factor combination, see Table 8. With regard to RTs, the main effects for interval and transition were significant. Responses were significantly faster after the medium interval (M 832 ms, SD 191) than after the short interval (M 850 ms, SD 194), F (1, 63) = 7.27, p = .009, η 2p = .103, and responses were significantly faster to task repetitions (M 792 ms, SD 165) than to task switches (M 889 ms, SD 225), F (1, 63) = 58.44, p < .001, η 2p = .481. The main effect for expectancy did not gain significance, F (1, 63) = 1.49, p = .227, η 2p = .023. Furthermore, there was a significant three-way interaction between interval, transition, and expectancy, F (1, 63) = 6.17, p = .016, η 2p = .089. For a complete overview of the statistical results of the reported ANOVA, see Table 7.
Based on the reported three-factor interaction, we conducted a two-factor repeated-measures ANOVA with the factors transition (switch vs. repetition) and expectancy of interval—task combination (expected vs. unexpected), separately, for the short interval of 500 ms and the medium interval of 1000 ms. For the short interval, the main effect for transition, F (1, 63) = 39.68, p < .001, η 2p = .386 was significant, which meant that RTs were significantly faster for task repetitions (M 795 ms, SD 162), than for task switches (M 904 ms, SD 242). The main effect for expectancy was not significant, F < 1. Furthermore, the interaction between transition and expectancy gained significance, F (1, 63) = 7.42, p = .008, η 2p = .105. For the medium interval, only the main effect for transition gained significance. RTs were significantly faster in trials with task repetitions (M 789 ms, SD 179), compared to trials with task switches (M 874 ms, SD 219), F (1, 63) = 33.26, p < .001, η 2p = .346. The main effect for expectancy, F (1, 63) = 1.31, p = .256, η 2p = .020, as well as the interaction between transition and expectancy, F (1, 63) = 1.46, p = 232, η 2p = .023, did not gain significance.
With regard to error rates, there were no main effects or interactions (see Fig. 3b).
Discussion
The results of Experiment 2 confirmed the results of Experiment 1 and speak, again, in favor of a relative representation of time-based task expectancy. In the learning phase, there was a tendency towards significantly faster responses in trials with expected combinations of interval and task, compared to trials with unexpected combinations of interval and task. The result pattern of the test phase speaks in favor of a relative time representation as participants responded faster in trials, where the combination of interval and task corresponded to the combination of interval and task which had been frequently presented in the learning phase before (in relative terms).
Thus, the results of Experiment 2 speak in favor of the hypothesis that time-based task expectancy is based on a relative representation of time, also when the global temporal environment is sped up.
General discussion
In the present study, we investigated whether time-based task expectancy refers to relative or absolute representations of time. In a learning phase, participants were trained to associate two different tasks with two different time intervals. In a test phase, these two intervals were either globally prolonged (Experiment 1) or shortened (Experiment 2), and the absolute interval duration no longer predicted the upcoming task.
In the test phase of both experiments, performance was better when tasks were temporally expected in relative terms, and worse where they would have been expected in absolute terms. Thus, both experiments show that time-based expectancy for tasks employs relative, not absolute representations of time.
As described in the result sections, the main effect for task expectancy was not significant in all conditions and seemed to be modulated by the factors interval and transition. However, despite these modulations, the expectancy effect was in both experiments always numerically in the direction of a relative time representation instead of an absolute time representation. As we coded expectancy in the test phase in relative terms, the result pattern for expectancy should have been reversed, if participants had associated the tasks with the absolute durations of the intervals in the learning phase. These results are in line with the results of Thomaschke et al. (2015), who found out that participants also employed relative representations of time when they built up time-based expectancies for stimulus–response events.
Please note that our findings might be restricted to the time range which we investigated in the present study (500–1500 ms). Future studies should investigate if our results also hold true for very short time ranges, as well as for very long time ranges. However, the stability of relative time-based expectancy is not restricted to any specific type of global acceleration or deceleration. Dependent on system architecture, global slowdowns might be manifest in a scaling of each delay by a certain factor, or—as in the present study—by a constant addition to each delay, or to a combination of both. Relative time-based expectancy would survive each acceleration or deceleration, as long as the relative order of task-associated delay durations is retained.
What do these findings imply for the relation between task-switching costs and time-based expectancy in general? One important conclusion which we can draw from the present results is that time-based expectancy can improve performance in multi-tasking scenarios over and above reducing switch costs. At least for relatively longer intervals, time-based task expectancy facilitates task performance irrespective of the type of task in the previous trial. This means that the preparatory mechanism triggered by time-based expectancy targets cognitive processes which are not specific to switching a task set.
On a more general level, our results show that humans employ relative time representations not only for time-based expectancies for simple stimulus–response events (Thomaschke et al., 2015), but also for time-based expectancies of tasks. Besides allowing a deeper insight into the cognitive mechanisms underlying time-based task expectancy, our experiments have important practical implications concerning human–computer interaction. Whenever system delays are scheduled in a way that they are predictive of an upcoming event or task, humans seem to be able to build up time-based expectancies (e.g., Weber, Haering, & Thomaschke, 2013; Thomaschke, & Haering, 2014). Given that they base their task expectations on relative representations of time, rather than absolute durations, it should be possible to preserve these time-based task expectancies even when the whole technical device is sped up or slowed down, as long as the temporal relations are maintained. In global temporal changes, the temporal relation between events remains stable, e.g., successful loading is still faster than error messages, even when the whole computing system changes its speed. Thus, relative time-based task expectancies would still make correct predictions after global temporal changes and it should be the goal of interface designer to keep such temporal relations stable in human–machine interaction. Though, as already stated above, we did not find the effect of time-based task expectancies across all conditions, and therefore, its application in environments where time intervals are globally prolonged or shortened must be considered with caution.
However, whether time-based task expectancy is based on relative or absolute interval representations might be in part determined by a priori assumptions about the stability of the temporal environment, and whether potential changes in this environment are global or selective. In some interaction contexts, relative time-based expectancy might have clear advantages over absolute time-based expectancy. When different tasks depend on one technical parameter, such as Web-based computing tasks depend on data transmission rate, humans might tend to form their time-based task expectancies on relative representations, because in this context, pre-task delays are often globally shortened or lengthened. Therefore, time-based task expectancies based on relative temporal relations would still be beneficial after a global speeding or slowing, because the temporal relation between events remains stable, e.g., successful loading is still faster than error messages. Thus, in this context, relative time-based expectancies would still make correct predictions after global temporal changes.
By contrast, in other interaction contexts, absolute time-based task expectancy would be advantageous over relative task expectancy. When humans assume their interaction environment as being rather temporally invariant, they might base their time-based task expectancies on absolute temporal durations. This might be the case whenever different tasks rely on distinct technical subsystems, where tasks are often selectively sped up or slowed down, due to temporal changes in only one of the subsystems. For instance, different flight control tasks, such as latitude correction and vertical speed correction, rely on technically distinct cockpit instruments. After turbulences, demands for latitude correction are usually signaled faster (i.e., with a shorter delay) than demands for vertical speed correction (Martinussen, & Hunter, 2012). However, this relation might change due to sudden sub-system failures. When, for example, a malfunction in the latitude detector would selectively lengthen the delay of the signal for latitude corrections, latitude corrections would now be required later than vertical speed corrections. In such a situation, absolute time-based task expectancies would still correctly predict vertical speed corrections after the unaffected vertical speed signal delays, whereas there would be no predictions for the lengthened latitude signal delay. Relative time-based task expectancies, on the contrary, would make misleading task predictions at both delays in this example, because the temporal relation between both tasks had been inverted.
In sum, time-based task expectancy based on relative temporal relations is useful in environments where global temporal changes occur, whereas time-based expectancy based on absolute temporal durations is useful in environments where selective temporal changes occur. In the present study, we did not induce any assumptions about the temporal structure and stability of the technical device. As global slowing or speeding of computer programs is a prevalent assumption concerning the temporal dynamics in human–computer interaction, this assumption might have biased our participants to form their time-based task expectations based on relative temporal relations and not on absolute interval durations. Future experiments could investigate, whether the representational mode of time-based task expectancies could be biased by context, either towards relative or towards absolute time representations.
While our study explores for the first time the potential of time-based expectancy to improve multi-tasking performance, our experimental design was very much focused on consecutive task-switching scenarios. However, time-based expectancy might contribute to multi-tasking performance in many other ways, including temporally predictable task order in dual tasking, or response predicting stimulus-onset asynchronies in the psychological refractory period paradigm. Yet, the present data do not allow any conclusions concerning potential time-based expectancy effect in temporally overlapping dual tasking. Instead, we suggest investigating the potential of time-based expectancy in dual tasking with specific paradigms focusing on simultaneous task executions in the future.
In conclusion, our findings show that time-based task expectancy refers to a relative representation of time, rather than to an absolute representation. Humans seem to be able to flexibly transfer their time-based task expectancies between different global timing regimes. This finding is of importance not only for our basic understanding of cognitive mechanisms underlying time-based task expectancy, but has also practical implications for human–machine interaction, whenever system delays—due to different transmission rates—are globally prolonged or shortened.
References
Aufschnaiter, S., Kiesel, A., Dreisbach, G., Wenke, D., & Thomaschke, R. (2017). Time-based executive control: Expectancy in temporally structured multitasking. (submitted)
Block, R. A., & Grondin, S. (2014). Timing and time perception: A selective review and commentary on recent reviews. Frontiers in Psychology. doi:10.3389/fpsyg.2014.00648.
Block, R. A., & Gruber, R. P. (2014). Time perception, attention, and memory: A selective review. Acta Psychologica, 149, 129–133. doi:10.1016/j.actpsy.2013.11.003.
Bush, L. K., Hess, U., & Wolford, G. (1993). Transformations for within-subject designs: A Monte Carlo investigation. Psychological Bulletin, 113(3), 566–579. doi:10.1037//0033-2909.113.3.566.
Gotler, A., Meiran, N., & Tzelgov, J. (2003). Nonintentional task set activation: Evidence from implicit task sequence learning. Journal of Experimental Psychology Learning Memory, and Cognition, 10, 890–896. doi:10.3758/BF03196549.
Kiesel, A., Steinhauser, M., Wendt, M., Falkenstein, M., Jost, K., Philipp, A. M., & Koch, I. (2010). Control and interference in task switching—a review. Psychological Bulletin, 136(5), 849–874. doi:10.1037/a0019842.
Klemmer, E. T. (1956). Time uncertainty in simple reaction time. Journal of Experimental Psychology, 51(3), 179–184. doi:10.1037/h0042317.
Los, S. A., & Agter, F. (2005). Reweighting sequential effects across different distributions of foreperiods: Segregating elementary contributions to nonspecific preparation. Perception and Psychophysics, 67(7), 1161–1170. doi:10.3758/bf03193549.
Los, S. A., Knol, D. L., & Boers, R. M. (2001). The foreperiod effect revisited: Conditioning as a basis for nonspecific preparation. Acta Psychologica, 106, 121–145. doi:10.1016/S0001-6918(00)00029-9.
Los, S. A., Kruijne, W., & Meeter, M. (2014). Outlines of a multiple trace theory of temporal preparation. Frontiers in Psychology. doi:10.3389/fpsyg.2014.01058.
Los, S. A., Kruijne, W., & Meeter, M. (2016). Hazard versus history: Temporal preparation is driven by past experience. Journal of Experimental Psychology Human Perception and Performance, 43(1), 78–88. doi:10.1037/xhp0000279.
MacGregor, L. J., Corley, M., & Donaldson, D. I. (2010). Listening to the sound of silence: Disfluent silent pauses in speech have consequences for listeners. Neuropsychologia, 48(14), 3982–3992. doi:10.1016/j.neuropsychologia.2010.09.024.
Machado, A. (1997). Learning the temporal dynamics of behavior. Psychological Review, 104, 241–265. doi:10.1037/0033-295X.104.2.241.
Martinussen, M., & Hunter, D. R. (2012). Aviation psychology and human factors. Baca Raton: CRC Press.
Medina, J. M., Wong, W., Díaz, J. A., & Colonius, H. (2015). Advances in modern mental chronometry. Frontiers in Human Neuroscience. doi:10.3389/fnhum.2015.00256.
Merchant, H., & de Lafuente, V. (Eds.). (2015). Neurobiology of Interval Timing. New York: Springer.
Molet, M., & Zentall, T. R. (2008). Relative judgments affect assessments of stimulus duration. Psychonomic Bulletin and Review, 15(2), 431–436. doi:10.3758/pbr.15.2.431.
Näätänen, R. (1972). Time uncertainty and occurence uncertainty of the stimulus in a simple reaction time task. Acta Psychologica, 36(6), 492–503. doi:10.1016/0001-6918(72)90029-7.
Rieth, C. A., & Huber, D. E. (2013). Implicit learning of spatiotemporal contingencies in spatial cueing. Journal of Experimental Psychology Human Perception and Performance, 39(4), 1165–1180. doi:10.1037/a0030870.
Roberts, F., & Francis, A. L. (2013). Identifying a temporal threshold of tolerance for silent gaps after requests. The Journal of the Acoustical Society of America, 133(6), EL471–EL477. doi:10.1121/1.4802900.
Roberts, F., Margutti, P., & Takano, S. (2011). Judgments concerning the valence of inter-turn silence across speakers of American English, Italian, and Japanese. Discourse Processes, 48(5), 331–354. doi:10.1080/0163853x.2011.558002.
Rogers, R. D., & Monsell, S. (1995). Cost of a predictable switch between simple cognitive tasks. Journal of Experimental Psychology General, 124, 207–231. doi:10.1037/0096-3445.124.2.207.
Schröter, H., Birngruber, T., Bratzke, D., Miller, J., & Ulrich, R. (2015). Task predictability influences the variable foreperiod effect: Evidence of task-specific temporal preparation. Psychological Research, 79(2), 230–237. doi:10.1007/s00426-014-0550-z.
Shahar, N., Meyer, J., Hildebrandt, M., & Rafaely, V. (2012). Detecting system failures from durations and binary cues. International Journal of Human Computer Studies, 70(8), 552–560. doi:10.1016/j.ijhcs.2012.03.001.
Steinborn, M. B., & Langner, R. (2011). Distraction by irrelevant sound during foreperiods selectively impairs temporal preparation. Acta Psychologica, 136(3), 405–418. doi:10.1016/j.actpsy.2011.01.008.
Steinborn, M. B., & Langner, R. (2012). Arousal modulates temporal preparation under increased time uncertainty: Evidence from higher-order sequential foreperiod effects. Acta Psychologica, 139(1), 65–76. doi:10.1016/j.actpsy.2011.10.010.
Steinborn, M. B., Rolke, B., Bratzke, D., & Ulrich, R. (2008). Sequential effects within a short foreperiod context: Evidence for the conditioning account of temporal preparation. Acta Psychologica, 129(2), 297–307. doi:10.1016/j.actpsy.2008.08.005.
Steinborn, M. B., Rolke, B., Bratzke, D., & Ulrich, R. (2010). The effect of a cross-trial shift of auditory warning signals on the sequential foreperiod effect. Acta Psychologica, 134(1), 94–104. doi:10.1016/j.actpsy.2009.12.011.
Thomaschke, R., & Dreisbach, G. (2013). Temporal predictability facilitates action, not perception. Psychological Science, 24(7), 1335–1340. doi:10.1177/0956797612469411.
Thomaschke, R., & Dreisbach, G. (2015). The time-event correlation effect is due to temporal expectancy, not to partial transition costs. Journal of Experimental Psychology Human Perception and Performance, 41(1), 196–218. doi:10.1037/a0038328.
Thomaschke, R., & Haering, C. (2014). Predictivity of system delays shortens human response time. International Journal of Human Computer Studies, 72(3), 358–365. doi:10.1016/j.ijhcs.2013.12.004.
Thomaschke, R., Hoffmann, J., Haering, C., & Kiesel, A. (2016). Time-based expectancy for task relevant stimulus features. Timing and Time Perception, 4, 248–270. doi:10.1163/22134468-00002069.
Thomaschke, R., Kiesel, A., & Hoffmann, J. (2011a). Response specific temporal expectancy: Evidence from a variable foreperiod paradigm. Attention, Perception and Psychophysics, 73(7), 2309–2322. doi:10.3758/s13414-011-0179-6.
Thomaschke, R., Kunchulia, M., & Dreisbach, G. (2015). Time-based event expectations employ relative, not absolute, representations of time. Psychonomic Bulletin and Review, 22(3), 890–895. doi:10.3758/s13423-014-0710-6.
Thomaschke, R., Wagener, A., Kiesel, A., & Hoffmann, J. (2011b). The specificity of temporal expectancy: Evidence from a variable foreperiod paradigm. The Quarterly Journal of Experimental Psychology, 64(12), 2289–2300. doi:10.1080/17470218.2011.616212.
Volberg, G., & Thomaschke, R. (2017). Time-based expectations entail preparatory motor activity. Cortex, 92, 261–270. doi:10.1016/j.cortex.2017.04.019.
Wagener, A., & Hoffmann, J. (2010). Temporal cueing of target-identity and target-location. Experimental Psychology, 57, 436–445. doi:10.1027/1618-3169/a000054.
Watanabe, M., Hirose, K., Den, Y., & Minematsu, N. (2008). Filled pauses as cues to the complexity of upcoming phrases for native and non-native listeners. Speech Communication, 50(2), 81–94. doi:10.1016/j.specom.2007.06.002.
Weber, F., Haering, C., & Thomaschke, R. (2013). Improving the human–computer dialogue with increased temporal predictability. Human Factors The Journal of the Human Factors and Ergonomics Society, 55(5), 881–892. doi:10.1177/0018720813475812.
Wendt, M., & Kiesel, A. (2011). Conflict adaptation in time: Foreperiods as contextual cues for attentional adjustment. Psychonomic Bulletin and Review, 18(5), 910–916. doi:10.3758/s13423-011-0119-4.
Wittmann, M. (2013). The inner sense of time: How the brain creates a representation of duration. Nature Reviews Neuroscience, 1(3), 217–223. doi:10.1038/nrn3452.
Zentall, T. R., Weaver, J. E., & Clement, T. S. (2004). Pigeons group time intervals according to their relative duration. Psychonomic Bulletin and Review, 11(1), 113–117. doi:10.3758/bf03206469.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Ethical standards
This research was supported by a Grant within the Priority Program, SPP 1772 from the German Research Foundation (Deutsche Forschungsgemeinschaft, DFG), Grant no. TH 1554/3-1.
Conflict of interest
The authors declare that they have no conflict of interest.
Studies involving human participants
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki declaration and its later amendments or comparable ethical standards.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Rights and permissions
About this article

Cite this article
Aufschnaiter, S., Kiesel, A. & Thomaschke, R. Transfer of time-based task expectancy across different timing environments. Psychological Research 82, 230–243 (2018). https://doi.org/10.1007/s00426-017-0895-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00426-017-0895-1