
Abstract
The von Mises yield criterion is used in conjunction with its associated flow rule to provide the elastic/plastic stress and strain distributions within the rotating annular discs made of perfectly plastic material under plane stress conditions. The solution for strain rates is reduced to one nonlinear ordinary differential equation and two linear ordinary differential equations. These equations can be solved one by one. The strain solution requires a numerical technique to evaluate ordinary integrals. An example is presented to illustrate the general solution. The general method proposed can be readily extended to orthotropic and pressure-dependent yield criteria.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The Tresca yield criterion in conjunction with its associated flow rule has long been associated with the solution to the stresses and strains in thin rotating discs and shrink fits under plane stress conditions, including discs made of functionally graded materials (e.g. [1–3] where further references can be found). A mathematical advantage of this model is that the equations for strain rates can be integrated with respect to the time giving the corresponding equations for strains. Therefore, the original flow theory of plasticity reduces to the corresponding deformation theory of plasticity. A number of solutions for the deformation theory of plasticity used in conjunction with the von Mises yield criterion are also available (e.g. [4–6] where further references can be found). The stress distributions in rotating discs from von Mises and Tresca yield criteria have been compared in [7]. It has been found that differences arise between the two distributions, especially in the residual stress values. It is reasonable to expect that differences in the corresponding strain distributions are even larger. Therefore, it is of interest to develop a method for obtaining a semi-analytical solution for the von Mises yield criterion and its associated flow rule using the flow theory of plasticity. Few analyses have employed this model, e.g. [8, 9]. In these works, a finite difference technique has been adopted to calculate the distribution of strains. The present paper reduces the original boundary value problem for a rotating elastic/plastic annular disc of perfectly plastic material obeying the von Mises yield criterion and its associated flow rule to solving nonlinear and linear ordinary differential equations and evaluating ordinary integrals. In particular, the radial distribution of strain rates is found from one nonlinear ordinary differential equation and two linear ordinary differential equations. These equations can be solved one by one. The strain solution requires a numerical technique to evaluate ordinary integrals. The general method proposed can be readily extended to orthotropic and pressure-dependent yield criteria. In particular, the stress solutions for these models are already available [10, 11].
2 Statement of the problem
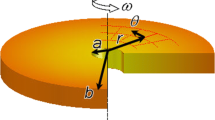
Consider a thin annular disc of yield stress \(\sigma _0 \), Poisson’s ratio \(\nu \), Young’s modulus E, outer radius \(b_0 \) and inner radius \(a_0 \) rotating with an angular velocity \(\omega \) about its axis. Strains are supposed to be infinitesimal. The disc has no stress at \(\omega =0\). The state of stress in the rotating disc is two-dimensional (\(\sigma _z =0)\) in a cylindrical coordinate system \(\left( {r,\;\theta ,\;z} \right) \) with its z axis coinciding with the axis of the disc. Here \(\sigma _z \) is the axial stress (\(\sigma _\mathrm{r}\) and \(\sigma _\theta \) stand for the radial and circumferential stresses, respectively). The angular velocity \(\omega \) slowly increases from zero to some prescribed value. Therefore, the component of the acceleration vector in the circumferential direction is neglected. The boundary value problem is axisymmetric, and its solution is independent of \(\theta \). The normal stresses in the cylindrical coordinate system are the principal stresses. The boundary conditions are
for \(r=a_0 \) and \(r=b_0 \). It is assumed that the maximum value of \(\omega \) is high enough to initiate plastic yielding. Therefore, the disc consists of two regions, elastic and plastic. The elastic strains are related by Hooke’s law to the stresses. In particular, in the cylindrical coordinates these strains are
The superscript e denotes the elastic part of the strain and will denote the elastic part of the strain rate as well. In the elastic region, the whole strain is elastic. The superscript e is employed in Eq. (2) as the same equations are satisfied by the elastic part of the strain in the plastic region. The superscript can be dropped in the elastic region. It is assumed that the von Mises yield criterion and its associated flow rule are valid in the plastic region. These constitutive equations are written in plane stress as
and
where \(\lambda \) is a non-negative multiplier. The superimposed dot denotes the time derivative at fixed r, and the superscript p denotes the plastic part of the strain and strain rate. Therefore, \(\dot{\varepsilon }_\mathrm{r}^\mathrm{p} , \dot{\varepsilon }_\theta ^\mathrm{p} \) and \(\dot{\varepsilon }_z^\mathrm{p} \) are the plastic strain rates. The total strains and strain rates in the plastic region are
The constitutive equations should be supplemented with the equilibrium equation of the form
Here \(\varsigma \) is the density of the material.
It is convenient to introduce the following dimensionless quantities
The material model adopted is rate independent. Therefore, the time derivative can be replaced with the derivative with respect to any monotonically increasing parameter. In particular, it is convenient to introduce the following quantities
It will be seen later that the use of the equation of strain rate compatibility facilitates the analysis. This equation is equivalent to
Using (7), Eq. (6) can be transformed to
3 Purely elastic solution
The purely elastic solution of the boundary value problem under consideration is well known (see, e.g. [12]). Using (7) the solution satisfying the boundary condition (1) at \(\rho =1\) can be written as
Here A is a constant of integration. Using the boundary condition (1) at \(\rho =a\), this constant is determined as
Substituting (12) into (11) supplies the distribution of the stresses and strains in the purely elastic disc. In particular,
at \(\rho =a\). Substituting (13) into the yield criterion (3) shows that
where \(\Omega _\mathrm{e} \) is the value of \(\Omega \) at which the plastic region starts to develop from the inner radius of the disc. In what follows, it is assumed that \(\Omega >\Omega _\mathrm{e} \).
The solution (11) is valid in the elastic region of the elastic/plastic disc. However, A is not given by (12).
4 Elastic/plastic stress solution
The elastic/plastic stress solution is available [7]. For completeness, this solution is presented below (in our nomenclature). The yield criterion (3) is satisfied by the following substitution
where \(\psi \) is a new function of \(\rho \) and \(\Omega \). Substituting (15) into (10) gives
It follows from the boundary condition (1) at \(\rho =a\) and (15) that the boundary condition to Eq. (16) is
for \(\rho =a\). Let \(\rho _\mathrm{c} \) be the dimensionless radius of the elastic/plastic boundary and \(\psi _\mathrm{c} \) be the value of \(\psi \) at \(\rho =\rho _\mathrm{c} \). The radial and circumferential stresses are continuous across the elastic/plastic boundary. Therefore, it follows from (11) and (15) that
Eliminating A between these equations results in
This equation and the solution of Eq. (16) constitute the set of equations to find \(\rho _\mathrm{c} \) and \(\psi _\mathrm{c} \) at a given value of \(\Omega \). Then, A can be determined from any of Eq. (18). The distribution of the stresses in the elastic region, \(\rho _\mathrm{c} \le \rho \le 1\), follows from (11). The distribution of the stresses in the plastic region, \(a\le \rho \le \rho _\mathrm{c} \), can be found from (15) and the solution of Eq. (16). The entire disc is plastic when \(\rho _\mathrm{c} =1\). The corresponding value of \(\Omega \) is denoted by \(\Omega _\mathrm{p} \). This value can be calculated numerically since the dependence of \(\rho _\mathrm{c} \) on \(\Omega \) has been already found from (19) and the solution of Eq. (16). The variation of \(\Omega _\mathrm{e} \) given in (14) and \(\Omega _\mathrm{p} \) with a at \(\nu =0.3\) is depicted in Fig. 1.

Variation of \(\Omega _\mathrm{e} \) and \(\Omega _\mathrm{p} \) with a at \(\nu =0.3\)
5 Elastic/plastic strain solution
The strain solution in the elastic region follows from (11) where A should be expressed in terms of \(\Omega \) by means of the solution of Eqs. (18) and (19). Eliminating \(\lambda \) in (4), replacing the time derivative with the derivative with respect to \(\Omega \) and using (8) lead to
Eliminating the stresses in these equations by means of (15) yields
The elastic strains in the plastic region are found from (2), (7) and (15) as
Then,
Taking into account (5), Eq. (9) can be rewritten as
Using (20) this equation can be transformed to
This equation and (5) combine to give the following equation for \(\xi _\theta \)
Using (22) it is possible to eliminate \(\xi _\mathrm{r}^\mathrm{e} \) and \(\xi _\theta ^\mathrm{e} \). It is evident that (23) is a linear ordinary differential equation. However, to solve this equation it is necessary to determine the derivative \({\partial \psi }/{\partial \Omega }\) involved in (22). To this end, Eq. (16) is differentiated with respect to \(\Omega \). As a result,
where \(\chi ={\partial \psi }/{\partial \Omega }\) . The derivative \({\partial \psi }/{\partial \rho }\) in Eq. (24) can be eliminated by means of Eq. (16). Then, Eq. (24) becomes
It is seen from the boundary condition (17) that \({\partial \psi }/{\partial \Omega }=0\) at \(\rho =a\). Therefore, the boundary condition to Eq. (25) is
for \(\rho =a\). It is evident that (25) is a linear ordinary differential equation. This equation should be solved numerically since its coefficients are numerical functions of \(\rho \) and are determined from the solution of Eq. (16).
The boundary condition to Eq. (23) is derived from the condition that \(\left[ {\xi _\theta } \right] =0\) at \(\rho =\rho _\mathrm{c} \). Here \(\left[ {\ldots } \right] \) denotes the amount of jump in the quantity enclosed in the brackets. The value of \(\xi _\theta \) on the elastic side of the elastic/plastic boundary is determined from (11) as
Therefore, the boundary condition to Eq. (23) is
for \(\rho =\rho _\mathrm{c} \). Equation (23) should be solved numerically. Then, the total circumferential strain in the plastic region is found by integration of \(\xi _\theta \) with respect to \(\Omega \) at a given value of \(\rho =\rho _t \). Let \(\Omega _\mathrm{f} \) be the value of \(\Omega \) at which the radial distribution of the circumferential strain should be calculated. The value of \(\rho _\mathrm{c} \) corresponding to \(\Omega =\Omega _\mathrm{f} \) is denoted by \(\rho _\mathrm{f} \). It is evident that \(a\le \rho _t <\rho _\mathrm{f} \). The value of \(\Omega \) at \(\rho _\mathrm{c} =\rho _t \) is denoted by \(\Omega _t \). Then,
Here \(E_\theta ^t \) is the circumferential strain on the elastic side of the elastic/plastic boundary at \(\rho _\mathrm{c} =\rho _t \). This strain is found from (11) as
Here \(A_t \) is the value of A at \(\rho _\mathrm{c} =\rho _t \). This value is determined from (18) and (19). It follows from Eqs. (5) and (22) that
Substituting Eq. (31) into Eq. (20) yields
Then,
The total radial and axial strains in the plastic zone are found by summing the plastic parts given by (33) and the elastic parts given by (21).

Radial stress distribution in an \(a=0.3\) disc at several values of \(\Omega \)

Circumferential stress distribution in an \(a=0.3\) disc at several values of \(\Omega \)

Total radial strain distribution in an \(a=0.3\) disc at several values of \(\Omega \)
6 Illustrative example
Equations (16), (24) and (23) have been solved numerically in the range \(\Omega _\mathrm{e} \le \Omega \le \Omega _\mathrm{p} \) at \(\nu =0.3\) and \(a=0.3\). The variation of the radial and circumferential stresses with \(\rho \) at several values of \(\Omega \) is depicted in Figs. 2 and 3, respectively. The associated strain distributions have been found from Eqs. (2), (5), (29) and (33) at the same values of \(\Omega \). The distributions of the total strains are shown in Figs. 4 (radial strain), 5 (circumferential strain) and 6 (axial strain). The variation of the plastic strains with \(\rho \) is depicted in Figs. 7 (radial strain), 8 (circumferential strain) and 9 (axial strain). In Figs. 2, 3, 4, 5, 6, 7, 8 and 9,

Total circumferential strain distribution in an \(a=0.3\) disc at several values of \(\Omega \)

Total axial strain distribution in an \(a=0.3\) disc at several values of \(\Omega \)

Radial plastic strain distribution in an \(a=0.3\) disc at several values of \(\Omega \)

Circumferential plastic strain distribution in an \(a=0.3\) disc at several values of \(\Omega \)

Axial plastic strain distribution in an \(a=0.3\) disc at several values of \(\Omega \)
7 Conclusions
This article presents a solution for the stresses and strains within a rotating elastic/plastic annular disc. The disc has been simplified by assuming that no radial pressure exists at its boundaries. The von Mises yield criterion and its associated flow rule have been adopted. Therefore, in contrast to the deformation theory of plasticity used in [4–6], the constitutive equations connect stresses and strain rates. This greatly adds to the difficulties of a solution. It has been demonstrated that it is advantageous to differentiate the equilibrium equation with respect to \(\Omega \) to arrive at Eq. (25) for \({\partial \psi }/{\partial \Omega }\). This is a linear ordinary differential equation, and its solution supplies the dependence of the derivative \({\partial \psi }/{\partial \Omega }\) on \(\rho \). Having this derivative the coefficients of Eq. (23) are found as functions of \(\rho \) by means of Eq. (22) and the solution of Eq. (16). Therefore, Eq. (23) can be solved for \(\xi _\theta \). Then, the radial distribution of the strains is determined by evaluating the ordinary integrals involved in Eqs. (29) and (33).
The only parameter that affects the solution of Eqs. (16) and (25) is a. This parameter is involved in the boundary conditions (17) and (26). Therefore, a single solution for a disc of given geometry is valid for any material. Moreover, it is seen from Eq. (27) that only two parameters, a and \(\nu \), affect the value of \({\xi _\mathrm{c} }/k\). Therefore, it follows from Eqs. (22) and (23) that \(\xi _\theta \) is proportional to k. So are \(\varepsilon _\mathrm{r}, \varepsilon _\theta , \varepsilon _z , \varepsilon _\mathrm{r}^\mathrm{p} , \varepsilon _\theta ^\mathrm{p} \), and \(\varepsilon _z^\mathrm{p} \) as can be seen from Eqs. (5), (21), (29), (30) and (33). Therefore, k is in fact immaterial. For example, the numerical solution illustrated in Figs. 4, 5, 6, 7, 8 and 9 supplies the solutions for \(a=0.3\) discs of material with \(\nu =0.3\) but any yield stress and Young’s modulus.
It is known that the application of computational models to plane stress problems leads to specific difficulties nonexistent in other formulations [13]. The solution found can serve as a benchmark problem for verifying numerical codes developed for discs made of strain hardening material as the perfectly plastic material model represents a particular case of such material. Accurate benchmark results are essential for validating numerical solutions [14, 15]. On the other hand, the method proposed in the present article can be readily expended to other perfectly plastic materials. In particular, one of the key points of the method is to satisfy the yield criterion by means of (15). As a result, Eq. (16) for \(\psi \) is obtained and this new variable is involved in all equations for strain rates and strains. Substitutions similar to (15) have been proposed in [10] for the Hill orthotropic yield criterion [16] and in [17] for the Drucker–Prager yield criterion [18]. The latter is valid for pressure-dependent material. Therefore, analysis of such discs is very similar to that performed in the present paper. In particular, stress analyses have been already carried out in [10, 11].
References
Gamer, U., Kollmann, F.G.: A theory of rotating elasto-plastic shrink fits. Ing. Arch. 56, 254–264 (1986)
Akis, T., Eraslan, A.N.: Exact solution of rotating FGM shaft problem in the elastoplastic state of stress. Arch. Appl. Mech. 77, 745–765 (2007)
Nejad, M.Z., Rastgoo, A., Hadi, A.: Exact elasto-plastic analysis of rotating disks made of functionally graded materials. Int. J. Eng. Sci. 85, 47–57 (2014)
Eraslan, A.N.: Stress distributions in elastic–plastic rotating disks with elliptical thickness profiles using Tresca and von Mises criteria. ZAMM 85, 252–266 (2005)
Toussi, H.E., Farimani, M.R.: Elasto-plastic deformation analysis of rotating disc beyond its limit speed. Int. J. Press. Ves. Pip. 89, 170–177 (2012)
Hassani, A., Hojjati, M.H., Farrahi, G.H., Alashti, R.A.: Semi-exact solution for thermo-mechanical analysis of functionally graded elastic–strain hardening rotating disks. Commun. Nonlinear Sci. Numer. Simul. 17, 3747–3762 (2012)
Rees, D.W.A.: Elastic–plastic stresses in rotating discs by von Mises and Tresca. ZAMM 79, 281–288 (1999)
Alexandrova, N., Alexandrov, S., Vila Real, P.: Displacement field and strain distribution in a rotating annular disk. Mech. Based Des. Struct. Mach. 32, 441–457 (2004)
Aleksandrova, N.: Application of Mises yield criterion to rotating solid disk problem. Int. J. Eng. Sci. 51, 333–337 (2012)
Alexandrova, N., Alexandrov, S.: Elastic–plastic stress distribution in a plastically anisotropic rotating disk. Trans. ASME J. Appl. Mech. 71, 427–429 (2004)
Alexandrov, S.E., Lomakin, E.V., Jeng, Y.-R.: Effect of the pressure dependency of the yield condition on the stress distribution in a rotating disk. Dokl. Phys. 55, 606–608 (2010)
Timoshenko, S.P., Goodier, J.N.: Theory of elasticity, 3rd edn. McGraw-Hill, New York (1970)
Kleiber, M., Kowalczyk, P.: Sensitivity analysis in plane stress elasto-plasticity and elasto-viscoplasticity. Comput. Methods Appl. Mech. Eng. 137, 395–409 (1996)
Roberts, S.M., Hall, F.R., Bael, A.V., Hartley, P., Pillinger, I., Sturgess, C.E.N., Houtte, P.V., Aernoudt, E.: Benchmark tests for 3-D, elasto-plastic, finite-element codes for the modeling of metal forming processes. J. Mater. Process. Technol. 34, 61–68 (1992)
Helsing, J., Jonsson, A.: On the accuracy of benchmark tables and graphical results in the applied mechanics literature. Trans. ASME J. Appl. Mech. 69, 88–90 (2002)
Hill, R.: The Mathematical Theory of Plasticity. Clarendon Press, Oxford (1950)
Alexandrov, S., Jeng, Y.-R., Lomakin, E.: Effect of pressure-dependency of the yield criterion on the development of plastic zones and the distribution of residual stresses in thin annular disks. Trans. ASME J. Appl. Mech. 78, 031012 (2011)
Drucker, D.C., Prager, W.: Soil mechanics and plastic analysis for limit design. Q. Appl. Math. 10, 157–165 (1952)
Acknowledgments
The authors acknowledge financial support of this research through Grants 14-01-92002 (RFBR, Russia), 103-2923-E-194-002-MY3 (NSC, Taiwan) and NSH-1275.2014.1 (Russia).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Lomakin, E., Alexandrov, S. & Jeng, YR. Stress and strain fields in rotating elastic/plastic annular discs. Arch Appl Mech 86, 235–244 (2016). https://doi.org/10.1007/s00419-015-1101-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00419-015-1101-9