
Abstract
This paper focuses on some mathematical and numerical aspects of reaction-diffusion problems pertaining to non-integer time derivatives using the well-known method of lower and upper solutions combined with the monotone iterative technique. First, we study the existence and uniqueness of weak solutions of the proposed models, then we prove some comparison results. Besides, linear finite element spaces on triangles are used to discretize the problem in space, whereas the generalized backward-Euler method is adopted to approximate the time non-integer derivative. Furthermore, the idea of this method is to construct two sequences of solutions of a linear initial value problem which are easier to compute and converge to the solution of the nonlinear problem. We show numerically through two examples that this convergence requires only few iterations. Some well-known examples with exact solutions and numerical results based on the finite element method in 2D are provided to validate the theoretical results. As a result, we confirm that the proposed method is efficient and easy to use to overcome the convergence and stability difficulties.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Partial differential equations (PDEs) with non-integer order derivatives have gained much more attention in the last years. Such derivatives have been applied recently to many problems in several fields, such as physics [1,2,3,4,5,6], engineering mechanics [7, 8], biology and ecology [9,10,11,12,13], epidemiology [14,15,16,17,18,19], stochastic process [20, 21] image processing [22,23,24], signal processing [25], medical imaging [26] chaos theory [27,28,29] and others.
In the present investigation, we consider the following initial boundary value problem with non-integer order time derivative
where \(\Omega \subset {\mathbb {R}}^{N}\) be a bounded domain with Lipschitz boundary \(\partial \Omega , Q=\) \((0, T)\times \Omega\) and \(\Gamma = (0, T)\times \partial \Omega , T>0.\) \({\mathcal {P}}\) denotes the second-order partial differential operator in the divergence form
with coefficients \(a_{i j}, c \in L^{\infty }(Q)\) and
The main idea is to study the situation when the involved nonlinear function f admits a splitting of a difference of two monotone functions or equivalently, of a sum of two functions \(f_1\) and \(f_2\), i.e.
which one of them is increasing and the other one is decreasing. The functions \(f_1, f_2: Q \times {\mathbb {R}} \rightarrow {\mathbb {R}}\) are of Caratheodory type, that is, \(f_1\) and \(f_2\) are measurable in \((t,x) \in Q\) for each \(u \in R\) and continuous in u for a.e. \((t,x) \in\) Q.
Generally, in applied mathematics it is difficult (if not impossible) to obtain exact solutions for most nonlinear partial differential equations (PDEs) with non-integer derivative. It is, therefore, an urgent necessity to look for efficient numerical methods to solve these types of PDEs. Indeed, several numerical methods have been proposed in the literature to solve such equations, the three best known are finite difference method (FDM), finite element method (FEM) and finite volume method (FVM). In [30], the authors have suggested a one and two dimensions finite difference method to numerically approximate the solutions of reaction-diffusion equations with Caputo time-fractional derivatives. Non-standard finite difference method and Spectral collocation method were used in [31] to obtain numerical solutions of fractional-order advection-dispersion problem. Reference [32] used the Legendre spectral finite difference method to solve non-linear reaction-diffusion equation and non-linear Burger’s-Huxleye quation with non-integer derivative in the ABC sense. In [33], the authors applied the finite difference method for solving parabolic equation with time Caputo derivative and fractional Laplacian. Error estimates for a semi-discrete finite element method for fractional order parabolic equations was obtained in [34]. The adaptive finite element method for fractional differential equations using hierarchical matrices was studied in [35]. In [36], the study used the finite element method to investigate the solutions of a space-time fractional Fokker-Planck equation. A Petrov–Galerkin finite element method was used by Ref. [37] to solve the convection-diffusion equations with non-integer derivatives. The authors of [38] presented the time discontinuous finite element method for numerical solution for the diffusion-wave equation with fractional derivative. In the Ref. [39], it was developed a finite Element Method for the numerical resolution of Space-Time Fractional Fokker-Planck Equation. Finally, [2] applied a finite element scheme with Newton’s method for solving the time-fractional nonlinear diffusion equation using fractional Crank-Nicolson scheme. Some other outstanding studies PDEs with non-integer derivatives adopting finite element method have been made in [40,41,42,43,44,45,46,47, 47] and related references.
The best computational algorithms for a numerical solution are the numerically stable and convergent schemes, for problem (1.1) this is guaranteed easily if the second member f does not depend on the unknown function u. For nonlinear systems, most of works cited above and in related references in the literature use explicit approximation for the nonlinear term f in (1.1). Such formulation gives a linear finite difference approximation at each time step and is, therefore, more suitable for digital processing. Unfortunately, this approach can also lead to incorrect or misleading information about the solution, see for example [48, 49]. The problem of stability can be solved by using the Newton method for the implicit scheme, several works in this direction were carried out, see for example [50]. Furthermore, Newton’s method has two drawbacks, the first is for solving some real multi-physical problems is the need for evaluating the entries of the Jacobian matrix. The second is that the Newton method is locally convergent.
We propose in this paper an iterative scheme to prove the existence and uniqueness of weak solutions of problem (1.1) as well as for the computation of numerical solutions. Furthermore, the iterative processes given in this article give two monotone sequences and are not more complicated than the processes used for the corresponding linear parabolic system when the spatial dimension is greater than one. This type of monotone iteration process was used firstly for elliptical equations in [51, 52], and for parabolic equations in [53]. Similar methods have been used in [54,55,56,57,58] for systems of parabolic and elliptical equations, but are mainly limited to problems with classical derivatives and by the finite difference method for numerical solutions. In this paper, we develop a monotone iterative method with upper and lower solutions for a parabolic problems with non-integer derivative, moreover we present a numerical scheme that combines this method to the finite element method. We prove firstly the existence and uniqueness of the weak solutions for the Nonlinear reaction-diffusion equation with non integer derivative. We show that the monotone sequences, which are solutions of the linear equation converge to the minimal and maximal solutions of the nonlinear equation, these comparison results are used to establish the last result. In addition, to compute the numerical solution, the linear \(P_1\) finite element spaces on triangles are used for the space discretization, where the generalized backward-Euler method is used to approximate the time non-integer derivative.
The layout of this paper is as follow: Sect. 2 provides the definitions and preliminary results to be used in the article. In Sect. 3, main results are stated and proved: comparison results are obtained and the existence of a weak solution for the nonlinear equations (1.1) are proved. Some techniques to construct the lower and upper solutions are given in Sect. 4, where some application examples of the results are presented in Sect. 5. The linear finite element method on triangle is used in Sect. 6 to compute the numerical solution. In Sect. 7 some numerical simulations are discussed to confirm theoretical results. Finally, conclusion and future works are given in Sect. 8.
2 Definitions and preliminaries
In [59], the authors gave a new definition of no-integer derivative which is a natural extension to the usual first derivative as follows:
Definition 2.1
([59]) Given a function \(f :[0, \infty ) \longrightarrow {\mathbb {R}}\) . Then for all \(t>0, \quad \beta \in (0,1],\) let
\({\mathcal {D}}^{\beta }\) is called the Conformable derivative of f of order \(\beta .\) If f is \(\beta\)-differentiable in some \((0, b), b>0,\) and \(\lim _{t \rightarrow 0^{+}} {\mathcal {D}}^{\beta }(f)(t)\) exists, then let
Now we shall present some properties of this new derivative, more properties of this type of derivation are given in [59,60,61,62,63].
Definition 2.2
(Conformable Integral [59]) Let \(a \ge 0\) and \(t \ge a\) . Also, let f be a function defined on (a, t] and \(\beta \in {\mathbb {R}} .\) Then, the \(\beta -\)Conformable integral of f is defined by,
if the Riemann improper integral exists. When \(a=0\) we write \({\mathcal {I}}_{0}^{\beta }(f)(t)={\mathcal {I}}^{\beta }(f)(t)\)
\(f : [a,b]\subset {\mathbb {R}} \rightarrow {\mathbb {R}}\) is \(\beta\)-integrable on [a, b] if and only if \(t^{\beta -1} f\) is integrable on [a, b].
Lemma 2.3
( [60]) Assume that \(f :[a, \infty ) \rightarrow {\mathbb {R}}\) is continuous and \(0< \beta \le 1.\) Then, for all \(t>a\) we have
Lemma 2.4
( [60]) Let \(f :(a,\infty ) \rightarrow {\mathbb {R}}\) be differentiable and \(0<\beta \le 1 .\) Then, for all \(t>a\) we have
In the rest of this section, we assume \(a, b \in {\mathbb {R}}, 0<a< b\).
Definition 2.5
([61]) Let \(p\in [1,+\infty ]\) and let \(f : [a,b]\subset {\mathbb {R}} \rightarrow \overline{{\mathbb {R}}}\) be a measurable function. Say that f belongs to \(L_{\beta }^{p}([a,b])\) provided that either
or there exists a constant \(C \in {\mathbb {R}}\) such that
Theorem 2.6
([61]) Let \(p \in [1,+\infty ]\). Then the set \(L_{\beta }^{p}\left( [a, b]\right)\) is a Banach space endowed with the norm defined for \(f \in L_{\beta }^{p}\left( [a, b]\right)\) as
\(\Vert f\Vert _{L_{\beta }^{p}\left( [a, b]\right) }=\left\{ \begin{array}{l}{\left( \int _{a}^{b}|f(t)|^{p} d_{\beta } t\right) ^{1 / p}} \quad \quad \quad \text { if }1\le p<+\infty ,\\ { \text{ inf } \left\{ C \in {\mathbb {R}} :|f| \le C \text { a.e. on }[a, b]\right\} } \quad \text { if }p=\infty . \end{array}\right.\)
Moreover, \(L_{\beta }^{2}\left( [a, b]\right)\) is a Hilbert space with the inner product given for every \((f, g) \in L_{\beta }^{2}\left( [a, b]\right) \times L_{\beta }^{2}\left( [a, b]\right)\) by
The integration by parts theorem and the Conformable version of granwal’s inequality and other properties of this derivative can be found in [59, 60, 64]. Before the statement of the properties, we denote
For \(p\in [1,+\infty [\) we set the space
Let \(H^{1}(\Omega )\) denote the usual Sobolev space of square integrable functions and let \(\left( H^{1}(\Omega )\right) ^{'}\) denote its dual space. Then by identifying \(L^{2}(\Omega )\) with its dual space, \(H^{1}(\Omega ) \subset L^{2}(\Omega ) \subset \left( H^{1}(\Omega )\right) ^{'}\) forms an evolution triple with all the embedding being continuous, dense and compact.
We set \(V=L_{\beta }^{2}\left( 0, T ; H^{1}(\Omega )\right) ,\) denote its dual space by \(V^{'}=L_{\beta }^{2}(0, T ;(H^{1}(\Omega ))^{'}),\) and define a function space W by
where the conformable derivative \({\mathcal {D}}_t^{\beta }\) is understood in the sense of distributions,
Lemma 2.7
( [64]) Let V, H, and \(V^{\prime }\) be Hilbert spaces such that \(V \subset H \equiv H^{\prime } \subset V^{\prime },\) where \(V^{\prime }\) is the dual of V and the injections are continuous. Suppose that \({\mathbf {u}} \in L^{2}_{\beta }([0, T] ; V)\) and \({\mathcal {D}}^{\beta }_t{\mathbf {u}} \in L^{2}_{\beta }\left( [0, T] ; V^{\prime }\right) .\) Then u is equal a.e. to a continuous function from [0, T] into H, and the following equality holds in the distribution sense on (0, T)
Moreover, the embedding \(W \subset C\left( [0, T] ; H\right)\) is continuous.
Remark 2.8
As a consequence of the previous identifications, the scalar product in H of \(f\in H\) and \(v\in V\) is the same as the scalar product of f and v in the duality between \(V^{'}\) and V:
3 Main results
Let \(H_{0}^{1}(\Omega )\) be the subspace of \(H^{1}(\Omega )\) whose elements have generalized homogeneous boundary values, and denote by \(H^{-1}(\Omega )\) its dual space. One can consult [65, 66] for general properties of Sobolev spaces. Then obviously \(H_{0}^{1}(\Omega ) \subset L^{2}(\Omega ) \subset H^{-1}(\Omega )\) forms also an evolution triple, and all statements made above remain true also in this situation when setting \(V_{0}=L_{\beta }^{2}\left( 0, T ; H_{0}^{1}(\Omega )\right)\) \(V_{0}^{'}=L_{\beta }^{2}\left( 0, T ; H^{-1}(\Omega )\right)\) and define
where \({\mathcal {D}}^{\beta }_t\) is the conformable derivative, is understood in the sense of vector-valued distributions and characterized by
The space W endowed with the norm
is a Banach space which is separable and reflexive [64]. Furthermore, by Lemma 2.7 the embedding \(W \subset C([0,T]; L^2(\Omega ))\) is continuous. Finally, because \(H^{1}(\Omega ) \subset L^{2}(\Omega )\) is compactly embedded, by [64, Lemma 3.2] we have a compact embedding of \(W \subset L_{\beta }^{2}\left( 0, T ; L^{2}(\Omega )\right)\)
We denote the duality pairing between the elements of \(V_{0}^{'}\) and \(V_{0}\) by \(\langle \cdot , \cdot \rangle ,\) and define the bi-linear form \({\mathcal {A}}\) associated with the operator \({\mathcal {P}}\) by
We set \(L^2_{\beta }=L_{\beta }^{2}[0,T;L^2(\Omega )]\) the cone \(L_{\beta }^{2+}\) of all nonnegative elements of \(L_{\beta }^{2}.\) This induces a corresponding partial ordering also in the subspace W of \(L^{2}(Q),\) and if \(v, w \in W\) with \(v \le w\) then \([v, w] :=\{u \in W | v \le u \le w\}\) denotes the order interval formed by v and w. Let \((\cdot , \cdot )\) denote the inner product in \(L_{\beta }^{2},\) define by
and denote by \(F_1\) and \(F_2\) the Nemytskij operators related with the functions \(f_1\) and \(f_2\), we have \(F_1 u(t,x)=f_1(t,x, u(t,x))\) and \(F_2 u(t,x)=f_2(t,x, u(t,x))\) for all \(u\in V_0\).
Definition 3.1
A function \(u,v \in W_{0}\) are said to be coupled weak solutions of (1.1) if
-
1.
\(F_1u+F_2v,F_1v+F_2u\in L^{2}_{\beta }\),
-
2.
\(u(0,x)=v(0,x)=u_0(x)\) in \(\Omega\),
-
3.
\(\langle {\mathcal {D}}_t ^{\beta }(u) , \varphi \rangle + {\mathcal {A}}(u, \varphi )=(F_1 u+F_2 v, \varphi )\) and \(\langle {\mathcal {D}}_t ^{\beta }(v) , \varphi \rangle + {\mathcal {A}}(v, \varphi )=(F_1 v+F_2 u, \varphi )\) for all \(\varphi \in V_{0}\).
Definition 3.2
A functions \(v ,w \in W_0\) are said to be a weak lower and upper solutions respectively of (1.1) if
-
1.
\(F_1 v +F_2w,F_1 w +F_2 v \in L^{2}_{\beta }\),
-
2.
\(v (t,x) \le 0\le w (t,x)\) on \(\Gamma\) and \(v (0,x) \le u_0(x)\le w (0,x)\) in \(\Omega ,\)
-
3.
\(\langle {\mathcal {D}}_t ^{\beta }(v) , \varphi \rangle + {\mathcal {A}}(v, \varphi )\leqslant (F_1 v+F_2 w, \varphi )\) and \(\langle {\mathcal {D}}_t ^{\beta }(w) , \varphi \rangle + {\mathcal {A}}(w, \varphi )\geqslant (F_1 w+F_2 v, \varphi )\) for all \(\varphi \in V_{0}\cap L_{\beta }^{2+}\).
Remark 3.3
In the definitions above, we have chosen \(g\equiv 0\).
3.1 Comparison results
We can now prove the following comparison result.
Theorem 3.4
Assume that \(v , w \in W_0\) are coupled lower and upper solutions of (1.1) and \(f_1, f_2\) satisfy the following inequalities
whenever \(u_{1} \ge u_{2}\) for some \(c_{1}, c_{2} \in L_{+}^{\infty }(Q).\) Then we have \(v \le w\).
Remark 3.5
Clearly, the condition (3.1) is satisfied with \(c_1=c_2=0\) when \(f_1\) is monotone nonincreasing in u and \(f_2\) is is monotone non-decreasing in u.
Proof
By the definition of coupled lower and upper solutions of (1.1) we get
and
for all \(\varphi \in V_{0} \cap L^{2+}_{\beta } .\) Choose \(\varphi =( v - w )^{+}=\max \{ v - w , 0\} \in V_{0} \cap L_{\beta }^{2+},\) so that \(( v - w )^{+}(0,x)=0\) and using (2.1) and the ellipticity condition (1.2), we get, for any \(\xi \in [0, T],\) the following inequality
where \(Q_{\xi }=\Omega \times (0, \xi ) \subset Q .\) Now set \(y(\xi )=\left\| ( v - w )^{+}(\xi ,\cdot )\right\| _{L^{2}(\Omega )}^{2}\) to obtain
since \(v - w \in C\left( [0, T]; L^{2}(\Omega )\right) , y(\xi ) \ge 0\) and \(y(0)=0,\) By applying the Conformable Gronwall inequality, we get \(y(\xi )= 0\) for any \(\xi \in [0, T]\) which means \(( v - w )^{+}(t,x)=0\) a.e. in Q, that is, \(v \le w ,\) proving the claim. \(\square\)
The following corollary is also needed in our discussion.
Corollary 3.6
For any \(z \in W\) satisfying \(z(t,x) \le 0\) on \(\Gamma , z(0,x) \le 0\) in \(\Omega\) and
we have \(z \le 0\).
Proof
Let \(\varphi (t,x)=z^{+}(t,x)=\sup \{z(t,x), 0\}\) then \(\varphi \in V_0 \cap L_{+}^{2}(\Omega ) .\) Hence we have \(z^+(0,x)=0 \text { in }\Omega\) and
we have
we get for any \(\xi \in (0, T]\)
then
which implies \(z^+(t,x)=0\) a.e. \(x\in Q\), for all \(t\in [0,T]\). i.e. \(z(t,.)\le 0\) a.e. in \(\Omega\), for all \(t\in [0,T]\). \(\square\)
3.2 Existence and uniqueness
We consider the linear IBVP
where \(\phi \in L^{2}(\Omega )\) and \(g \in L_{\beta }^{2} \subset V_{0}^{*}.\)
Theorem 3.7
There exists a unique weak solution \(u \in W_{0}\) to the IBVP (3.2), and for some constant \(C>0\)
Proof
For a similar proof using Fedo-Galerkin technique see [64]. \(\square\)
We shall prove the following result which includes several interesting special cases.
Theorem 3.8
Assume that
\(\left( A_{1}\right)\) \(v _{0}, w _{0}\) are coupled weak lower and upper solutions of (1.1) such that \(v _{0} \le w _{0}\) a.e. in Q
\(\left( A_{2}\right)\) \(f_1, f_2: Q \times R \rightarrow R\) are Caratheodory functions such that \(f_1(., ., u)\) is nondecreasing in u and g(., ., u) is nonincreasing in u for \((t, x) \in Q\) a.e.
\(\left( A_{3}\right)\) for any \(\mu _1, \mu _2 \in \left[ v _{0}, w _{0}\right] , h \in L_{\beta }^{2}\) where \(h(t,x)=f_1(t,x, \mu _1)+\) \(f_2(t,x, \mu _2)\)
Then there exist monotone sequences \(\left\{ v _{j}(t,x)\right\} _j,\left\{ w _{j}(t,x)\right\} _j \subset W_{0}\) such that
and \(v ^*, w ^*\) are the coupled weak minimal and maximal solutions of (1.1).
Proof
For simplicity we set \(g=u_0\equiv 0\), without loss of generality we consider the following IBVPs for each \(j=1,2, \ldots\)
and
whose variational forms associated with (3.3) and (3.4) are given by
and
for all \(\varphi \in V_{0}\).
By \(\left( A_{3}\right) , h \in L^{2}_\beta\) where \(h(t,x)=f_1\left( t,x, v_{0}\right) +f_2\left( t,x, w_{0}\right) .\) Hence by Theorem 3.7 there is a unique weak solution \(v_{1} \in W_{0}\) of (3.3) for \(j=1\). In the same way, we get the existence of a unique weak solution \(w_{1} \in W_{0}\) of (3.4). We shall first show that
To prove \(v_{0} \le v_{1},\) we find that \(v_{1}\) satisfies the relation
and note that \(v_{0}\) satisfies
for each \(\varphi \in V_{0} \cap L_{\beta }^{2+}\) and \(v_{0}(t,x) \le 0\) on \(\Gamma , v_{0}(0,x) \le 0\) in \(\Omega .\) Let \(z=v_{0}-v_{1} .\) Then z satisfies \(z(t,x) \le 0\) on \(\Gamma , z(0,x) \le 0\) in \(\Omega\) and
Hence by Corollary 3.6, we get \(z \le 0,\) that is \(v_{0} \le v_{1} .\) A similar reasoning proves that \(w_{1} \le w_{0}\). To show that \(v_{1} \le w_{1}\), we see from (3.6) that \(w_{1}\) satisfies
for each \(v \in V_{0} \cap L_{\beta }^{2+},\) using the monotone character of \(F_1\) and \(F_2\). By Corollary 3.6 we readily obtain, in view of (3.8) and (3.9), \(v_{1} \le w_{1}\), proving (3.7)
Next by induction we shall prove that if for some \(j>1\)
then
According to \(\left( A_{3}\right)\) and the relation (3.10), Theorem 3.7 guarantees the existence of unique weak solutions \(v_{j}, w_{j}, v_{j+1}, w_{j+1} \in W_{0}\) of (3.3) and (3.4). To show that \(v_{j} \le v_{j+1}\), consider
and
for each \(v \in V_{0} \cap L_{\beta }^{2+} .\) In the above inequality (3.13), we have used the monotone nature of \(F_1, F_2\) and (3.10). Corollary 3.6 then yields that \(v_{j} \le v_{j+1}\). Similarly, we can show that \(w_{j+1} \le w_{j} .\) To prove \(v_{j+1} \le w_{j+1}\), we see, using the monotone character of \(F_1, F_2\) and (3.10), that
for each \(\varphi \in V_{0} \cap L_{\beta }^{2+} .\) The relation (3.14), together with (3.12), prove by Corollary 3.6 that \(v_{j+1} \le w_{j+1},\) showing that (3.11) is valid. Hence by induction, we arrive at
for all j and for a.e. in Q. By the monotonicity of iterates \(\left\{ v_{j}\right\} ,\left\{ w_{j}\right\}\) and (3.15), there exist pointwise limits
for a.e. in Q Furthermore, since \(v_{j}, w_{j} \in \left[ v_{0}, w_{0}\right] ,\) it follows by Lebesgue’s dominated convergence theorem that
By \(\left( A_{3}\right) ,\) we have for any \(\mu _1, \mu _2 \in \left[ v_{0}, w_{0}\right] , F_1 \mu _1+F_2 \mu _2\) is continuous and bounded as a mapping from \(\left[ v_{0}, w_{0}\right] \subset L_{\beta }^{2} \rightarrow L_{\beta }^{2}\) and therefore in view of (3.16), it follows that
Since \(v_{j}, w_{j}\) are solutions of the linear IBVPs (3.3) and (3.4) with homogeneous initial boundary values, the estimate of Theorem 3.7 gives
and
Due to (3.17), the foregoing estimates imply the strong convergence of the sequences \(\left\{ v_{j}\right\} ,\left\{ w_{j}\right\}\) in W whose limits must be \(v ^*\) and \(w ^*\) respectively, because of the compact embedding \(W \subset L^{2}_{\beta }\) [64, Lemma 3.2.] . Since \(v_{j}, w_{j}\) for \(j \ge\) 1 belong to the subset \(M=[u \in W: u(0,x)=0]\) which is closed in W, it follows that their limits \(v ^*, w ^*\in M,\) which are the limits satisfying also homogeneous initial and boundary conditions. The convergence result (3.17) together with
permit us to pass to the limit in the corresponding variational forms (3.5) and (3.6) as \(j \rightarrow \infty\). This yields
and
for all \(\varphi \in V_{0},\) showing \(( v ^*, w ^*)\) are coupled weak solutions of (1.1).
Let \(u \in \left[ v_{0}, w_{0}\right]\) be any weak solution of (1.1). Then we show that \(v_{1} \le u \le w_{1} .\) Since \(v_{1}\) satisfies (3.9), we get, using monotone nature of \(F_1\) and \(F_2\)
for each \(v \in V_{0} \cap L_{\beta }^{2+} .\) Since u is a weak solution of (1.1) we have
for each \(\varphi \in V_{0} \cap L_{\beta }^{2+} .\) Corollary 3.6 therefore yields \(v_{1} \le u .\) A similar argument shows that \(u \le w_{1}\). Next we suppose that for some \(j>1\)
Then utilizing the monotone character of \(F_1\) and \(F_2,\) we obtain
for each \(\varphi \in V_{0} \cap L_{\beta }^{2+} .\) It then follows from Corollary 3.6 that \(v_{j+1} \le u\). In the same way, we can prove that \(u \le w_{j+1}\). Thus we arrive at
Hence by induction \(v_{j} \le u \le w_{j}\) for all j and consequently, taking the limit as \(j \rightarrow \infty ,\) we get \(v ^* \le u \le w ^*,\) proving that \(v ^*, w ^*\) are coupled weak minimal and maximal solutions of (1.1). The proof is now complete. \(\square\)
Corollary 3.9
In addition to the assumptions of Theorem 3.8, if we suppose that \(f_1, f_2\) satisfy the conditions (3.1), then \(u= v ^*= w ^*\) is the unique weak solution of (1.1).
Proof
Since \(v^* \le w^* ,\) it is sufficient to show that \(w ^*\le v ^* .\) But this follows right away from Corollary 3.6 if we set \(z=w^* -v^*.\) Thus the claim of the Corollary is true. \(\square\)
Several particular problems can be studied by the same steps and the conclusion of Theorem 3.8 is satisfied, for example if we consider the following problem
where the both \(h_1\) and \(h_2\) are not monotone. Then we find the following result
Corollary 3.10
Suppose that \(f_1(t,x, u)=h_1(t,x, u)+\eta _{1}(t, x) u\) is nondecreasing in u and \(f_2(t,x, u)=h_2(t,x, u)-\eta _{2}(t,x) u\) is nonincreasing in u, where \(\eta _{1}, \eta _{2} \in L_{+}^{\infty }(Q) .\) Then the same conclusion of Theorem 3.8 and Corollary 3.9 remains the same for problem (3.20).
Proof
We consider the problem (3.21) equivalent to (3.20)
Let \(v_{0}, w_{0}\) are coupled weak lower and upper solutions of (3.20), then are also for the problem (3.21). Let \(\tilde{{\mathcal {P}}}u={\mathcal {P}} u+\eta _{1} u-\eta _{2} u\), all the conditions on \({\mathcal {P}}\) in Theorem 3.8 are satisfied for \(\tilde{{\mathcal {P}}}\), so by application of the Theorem 3.8 and Corollary 3.1 we find the result of the Corollary 3.10. \(\square\)
3.3 Nonuniqueness of solutions
We have shown in the Corollary 3.9 that the solution of problem (1.1) is unique if \(f_1\) and \(f_2\) satisfy the condition (3.1), this result is only valid inside sector \(<v, w>\), so it does not give any information outside of sector \(<v, w>\). In the following example, we show that if \(f_1\) and \(f_2\) do not satisfy (3.1) then the problem (1.1) can have several solutions. Let us consider the problem
Clearly the functions
satisfy \((A_2)\) and \((A_3)\). To apply Theorem 3.8 consider the functions v and w defined by
where \(K\ge 1\) is a constant. We have
it remains to verify that v and w satisfy the differential inequality given by definition of upper and lower solutions, we have
then the following inequality must be satisfied
This implies
which is clearly satisfied by any \(K \ge 1\). The existence of solutions of (3.22) is guaranteed by the Theorem 3.8 but not the uniqueness. However \(u_1 = 0\) and \(u_2 =t^{3 / 2} \sin x\) are two different solutions to problem (3.22) in the sector \(<v, w>\) and
Additional solutions are given in the following form
4 Construction of lower and upper solutions
In the Conformable problem considered, to obtain the result of existence, we have to suppose that the problem has lower and upper solutions, therefore the results depend on the existence of the last ones. In many real problems the boundary and initial data are nonnegative and \(f (.,. , 0)=f_1 (.,. , 0)+f_2 (.,. , 0)\ge 0\). In this situation, it is only necessary to find a suitable non-negative upper solution.
In this section, let’s use the same techniques in [56] to construct the lower and upper solutions, the construction usually depends on the nonlinear term f(t, x, u), we usually manage to solve the problem linear.
To illustrate some methods for the construction of upper and lower solutions we consider a class of nonlinear functions which are sufficient to treat the reaction-diffusion models in (1.1). For this class of functions we require the following conditions:
-
\(f(t,x,0) \ge 0\) and there exist two functions \(K_{1}, K_{2}\) with \(K_{2} \ge 0\) such that
$$\begin{aligned} f(t,x,u) \le K_{1}(t,x)u+K_2(t,x) \quad \text{ when } u \ge 0,(t,x) \in \Omega . \end{aligned}$$
Then, the construction of upper solution w and lower solutions v it is often practical to use the solution of the Conformable linear parabolic problems in the form
and
where \(u_0\) and h are nonnegative functions. The choice of \(K_1\) and \(K_2\) depends on the reaction function f under consideration. Note that the unique weak solutions of (4.1) and (4.2) exists and is nonnegative in W.
Let us note that the construction of an efficient numerical scheme of problem (4.1) and (4.2) is not difficult because it is a linear problem, therefore it is enough to use in our case the implicit Conformable Euler scheme in time and the finite element method in space.
An other simple condition on f is the existence of constant functions \({\mathbf {p}}\) and \({\mathbf {q}}\) such that
It is easy to verify that the pair \(w={\mathbf {q}}\) and \(v={\mathbf {p}}\) are ordered upper and lower solutions.
5 Applications
In this section, we give some example of application of the existence and construction results of problem 1.1.
5.1 Nonlinear Michaelis-Menten oxygen uptake kinetics model
We consider the time Nonlinear Michaelis-Menten oxygen uptake kinetics model without advection term
where \(\sigma , K_m\) are positive constants. This model is a special case of (1.1) with
\(\partial f_2/\partial C<0\) then \(f_2\) is monotone decreasing function, any constant \(M\ge 0\) satisfying
is an upper solution of (5.1), whose existence and uniqueness of solution u is obtained from the Theorem 3.8 and Corollary 3.9 with \(0 \le u \le K .\) By application of the technique given in section 4 we can obtain a non-constant upper solution w, since
hence the solution w(t, x) of problem (4.1) corresponding to \(K_1=K_2=0\) is an upper solution.
Another effect can make the reaction function in (5.1) in the form when the effect of inhibition in the enzyme-substrate reaction scheme is taken into consideration the reaction function becomes
where \(\delta\) is a positive constant. In this case the same function w as in the previous model is a nonnegative upper solution.
5.2 The time Conformable Fisher’s model
We consider the time Conformable Fisher’s model
where \(\sigma , \theta\) are positive constants with \(0<\theta <1 .\) According to the real signification of the density function u, it must be between 0 and 1, then \(0 \le u_{0}(x) \le 1\) and \(0 \le h(t,x) \le 1 .\) Under this requirement, it is easy to verify that 0 and 1 are respectively lower and upper solutions of (5.4). Hence by Theorem 3.8, and Corollary 3.9 time Conformable Fisher’s model has a unique weak solution u such that \(0 \le u \le 1\) .
5.3 Conformable Models in reactor dynamics and heat conduction
The model described the neutron flux with an internal source with time Conformable derivative is given by
where \(\alpha , \delta\) are positive constants and \(\phi \ge 0\). Since
the solutions v(t, x) and w(t, x) of (4.1) and (4.2) respectively, with \(K_1=0, K_2=\alpha ^2/(4\delta )+\phi (x)\) (or \(K_1=\alpha , K_2=\phi (x)\)) are lower and upper solutions. Since by Theorem 3.8 and Corollary 3.9 that the weak solution of (5.5) exists and \(v \le u \le {\bar{w}}\).
Another Conformable heat-conduction problem is given by
where \(\delta , K\) are positive constants. Since \(f(0)=K \delta ^{4}\) and \(f(\xi ) \le 0\) for \(\xi \ge \delta\). We chose \(w=\xi \ge \max \{g,u_0,\delta \}\), then Theorem 3.8 and Corollary 3.9 implies that the reaction model (5.6) has a unique weak solution u where \(0 \le u(t, x) \le \xi .\)
The nonisothennal chemical reaction model is in the form
where \(\mu , \xi ,\) and \(\theta\) are positive constants. We have for any \(K \ge \xi\), \(f(0)=\mu \xi\) and \(f(K) \le 0\), Then by Theorem 3.8 and Corollary 3.9 the model (5.7) has a unique weak solution u where \(0 \le u(t, x) \le \max \{u_{0},\xi \} .\)
6 Discrete Galerkin finite element method
To solve (3.2) by the finite element method, we construct a finite dimensional subspace \(V_{h}\) of \(H_{0}^{1}(\Omega )\) using continuous piecewise basis functions, i.e.
where \(T_{j}\) is a regular family of triangulations of \(\Omega\), the elementary size of the elements K in \(T_{j}\) as defined by:
Then we can define the semi-discrete finite element method for the weak problem of (1.1): Find \(u_{j}:[0, T] \rightarrow V_{j}\) such that
where \(\Pi _{j}\) is the elliptic projection operator [ref 45...] into \(V_{j},\) i.e., for any \(u \in\) \(H^{1}(\Omega ), \Pi _{j} u \in V_{j}\) satisfies the equation
In semi-discrete approximation, the solution \(u\in V_j\) is in the form
where \(\phi _{k}\) are the basis functions of \(V_{j} .\)
Now the semi-discrete finite element scheme of the linear Picard problems (3.3) and (3.4) is given for \(m=1,2,\ldots\) by:
Find \(v^m,w^m\in V_j\) such that
In the above approximation, the solution \(v^m\) and \(w^m\) are in the form
where \(\phi _{k}\) are the basis functions of \(V_{j} .\) First, we partition the time interval [0, T] into N equal sub-intervals \(\left[ t_{k}, t_{k+1}\right]\) of length \(\Delta t=\frac{T}{N} .\) The time-discrete finite element method, such as the Conformable implicit Euler scheme [67] for (3.2) can be defined as: Find \((v,w)\in V_j\times V_j\) such that
We find the flowing system for unknown vectors \(U=\left( u_{1}, \cdots , u_{N}\right) ^{T}:\)
where
and
Note that if \(\beta =1\) we have \(L_{n}(\beta )=1\) then we find the classical Euler finite element scheme.
7 Examples and simulations results
7.1 Example with a known analytic solution on domain disk with three holes
We consider the flowing first test problem
Here, we consider in the first case the domain \(\Omega\) in the flowing form (see Fig. 1a):
with Lipschitz boundary given by
The exact solution of (7.1) is \(u(t,x,y)=\exp (-\pi ^2 t^{\beta }/\beta )\sin (\pi x)\sin (\pi y).\)

Two typs of Domain \(\Omega\)
Is not difficult to show that \(v\equiv -1\) is a lower solution and \(w\equiv 1\) is an upper solution of (7.1). By using the fully discrete finite element scheme given in (6.6) we solve the model (7.1) for two values of the non-integer order, 0.5 and 0.9. We chose firstly in our simulation \(\Delta t=0.01\) and \(h=0.08\). We show in Fig. 4 first 18 steps of \(V_n\) and \(W_n\) for \(\beta =0.5\) and in Fig. 2 first 13 steps of \(V_n\) and \(W_n\) for \(\beta =0.9\) at time step \(t=100\Delta t\). Observe that the upper and lower sequence converges more quickly to the numerical solution of the model and the two sequences coincide for \(k\ge 18\) for \(\beta =0.5\) and \(k\ge 13\) for \(\beta =0.9\). The comparison between the approximate and exact solution is presented in Fig. 3 for \(\beta =0.5\) and in Fig. 5 for \(\beta =0.9\).

Convergence of upper (\(W_n\)) and lower (\(V_n\)) sequences of Example 1 for \(h=0.08\), \(\Delta t=0.01\), \(t_1=100\Delta t\) and \(\beta =0.5\)

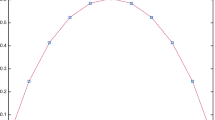
Comparison of numerical and exact solution for test Example 1 for \(\Delta t=0.01\), \(\beta =0.5\) at time \(t_1=100\Delta t\)

Convergence of upper (\(W_n\)) and lower (\(V_n\)) sequences of Example 1 for \(h=0.08\), \(\Delta t=0.01\), \(t_1=100\Delta t\) and \(\beta =0.9\)

Comparison of numerical and exact solution for test Example 1 for \(\Delta t=0.01\), \(\beta =0.5\) at time \(t_1=100\Delta t\)
When we chose now \(\Delta t=0.001\) and \(h=0.04\). We compute the numerical solution for \(\beta =0.5,0.9\) at time step \(t=100\Delta t\). We show in Figs. 6 and 8 that the upper and lower sequence converges more quickly to the numerical solution of the model and the two sequences coincide for \(k\ge 4\). The comparison between the approximate and exact solution is presented in Fig. 7 for \(\beta =0.5\) and in Fig. 9 for \(\beta =0.9\).

Convergence of upper (\(W_n\)) and lower (\(V_n\)) sequences of Example 1 for \(h=0.04\), \(\Delta t=0.001\), \(t_1=100\Delta t\) and \(\beta =0.5\)

Comparison of numerical and exact solution for test Example 1 for \(h=0.04\), \(\Delta t=0.001\), \(\beta =0.5\) at time \(t_1=100\Delta t\)

Convergence of upper (\(W_n\)) and lower (\(V_n\)) sequences of Example 1 for \(h=0.08\), \(\Delta t=0.01\), \(t_1=100\Delta t\) and \(\beta =0.9\)

Comparison of numerical and exact solution for test Example 1 for \(h=0.04\), \(\Delta t=0.01\), \(\beta =0.9\) at time \(t_1=100\Delta t\)
The corresponding \(L^2_{ \beta }(0,T,L^2(\Omega ))\)-norm errors and \(L^2_{\beta }(0,T,H^1_0(\Omega ))\)-norm errors for test Example 1 are listed in Tables 1 and 2 and presented in Fig. 10 for various values of \(\Delta t,h\) and the non-integer order \(\beta\).

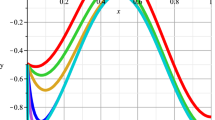
Convergence of \(L_2\) and \(H_1\) errors with increasing number of nodes in the coarse discretization for Example 1
7.2 Example on circle domain with unknown solution
We consider the generalized time Conformable Fisher-Kolmogorov equation
where \(h(t,x)=0\), \(u_0(x,y)=\sin (\pi x)\sin (\pi y)\) and \(k,\alpha\) are positive constants and \(q \in {\mathbb {N}}\). This model is a special case of problem (1.1) with \(\displaystyle f_1(t,x,y)=\frac{\sigma }{k}u\) and \(\displaystyle f_2(t,x,y)=-\frac{\sigma }{k}u^{q+1}\), the domain \(\Omega\) is taken as a disk with radius equal to 4 since is in the form (see Fig. 1b)
We chose in our simulation \(\alpha /k=1\) and \(q=2\). Is not difficult to show that \(v\equiv -1\) is a lower solution and \(w\equiv 1\) is an upper solution of (7.2). By using the fully discrete finite element scheme given in (6.6) we solve the model (7.2) for two values of \(\beta\), 0.5 and 0.95. We show in Figs. 11 and 12 first 9 steps of \(V_n\) and \(W_n\) for \(\beta =0.95\) at time step \(t=100\Delta t\) where \(\Delta t=0.01\). Observe that the upper and lower sequence converges more quickly to the numerical solution the model and the two sequences coincide for \(m\ge 9\), see Fig. 13. the same conclusion shown in Figs. 14,15 and 13 for the solution \(\beta =0.5\) (Fig. 16).

Convergence of lower sequence (\(V_n\)) for test Example 2 with \(\Delta t=0.01\), \(\beta =0.95\) and at time \(t=100\Delta t\)

Convergence of upper sequence (\(W_n\)) for test Example 2 with \(\Delta t=0.01\), \(\beta =0.95\) and at time \(t=1\)

Comparison between upper solutions \(W_1,W_4,W_9\) and lower solutions \(V_1,V_4,V_9\) for test Example 2 with \(\Delta t=0.01\), \(\beta =0.95\) and at time \(t=100\Delta t\)

Convergence of lower sequence (\(V_n\)) for test Example 2 with \(\Delta t=0.01\), \(\beta =0.5\) and at time \(t=100\Delta t\)

Convergence of upper sequence (\(W_n\)) for test Example 2 with \(\Delta t=0.01\), \(\beta =0.5\) and at time \(t=100\Delta t\)

Comparison between upper solutions \(W_1,W_4,W_9\) and lower solutions \(V_1,V_4,V_9\) for test Example 2 with \(\Delta t=0.01\), \(\beta =0.5\) and at time \(t=100\Delta t\)
8 Conclusion and future works
We have shown in this current paper that the monotone iterative technique combined with the upper and lower solutions method are an efficient tools to study theoretically and numerically nonlinear PDEs with non-integer order time derivative. The numerical algorithm for the computation of the solution is obtained by using finite element method for space and the generalization to non-integer order of the implicit Euler scheme for time discetization and we presented real examples and obtained important results.
As perspective, the numerical method used can be improved to increase the speed of convergence by combining this method with Newton’s method. The stability and the convergence, thus the error estimation of the scheme proposed in Sect. 4 are considered in our future works. This method can also be applied to other problems such as hyperbolic problems, systems with several equations, problems which contain nonlinear boundary conditions or problems that contain other types of non-integer derivations and this is the subject of our next articles.
References
Adolfsson K, Enelund M, Olsson P (2005) On the fractional order model of viscoelasticity. Mech Time-dependent Mater 9(1):15–34
Kumar D, Baleanu D (2019) Fractional calculus and its applications in physics. Front Phys 7:81
Hilfer R (2000) Applications of fractional calculus in physics. World Scientific
Tarasov VE (2013) Review of some promising fractional physical models. Int J Mod Phys B 27(09):1330005
Zhou H, Yang S, Zhang S (2018) Conformable derivative approach to anomalous diffusion. Physica A 491:1001–1013
Tuan NH, Ngoc TB, Baleanu D, O’Regan D (2020) On well-posedness of the sub-diffusion equation with conformable derivative model. Commun Nonlinear Sci Numer Simul 89:105332
Drapaca C, Sivaloganathan S (2012) A fractional model of continuum mechanics. J Elast 107(2):105–123
Atanacković TM, Pilipović S, Stanković B, Zorica D (2014) Fractional calculus with applications in mechanics. Wiley Online Library, Hoboken
Kilbas AA, Srivastava HM, Trujillo JJ (2006) Theory and applications of fractional differential equations, vol 204. Elsevier, Amsterdam
Podlubny I (1998) Fractional differential equations: an introduction to fractional derivatives, fractional differential equations, to methods of their solution and some of their applications. Elsevier, Amsterdam
Miller KS, Ross B (1993) An introduction to the fractional calculus and fractional differential equations. Wiley
Zhou Y, Wang J, Zhang L (2016) Basic theory of fractional differential equations. World scientific
Ma X, Wu W, Zeng B, Wang Y, Wu X (2020) The conformable fractional grey system model. ISA Trans 96:255–271
Boccaletti S, Ditto W, Mindlin G, Atangana A (2020) Modeling and forecasting of epidemic spreading: the case of COVID-19 and beyond. Chaos Solitons Fract 135:109794
Singh J, Kumar D, Hammouch Z, Atangana A (2018) A fractional epidemiological model for computer viruses pertaining to a new fractional derivative. Appl Math Comput 316:504–515
Almeida R, da Cruz AMB, Martins N, Monteiro MTT (2019) An epidemiological MSEIR model described by the Caputo fractional derivative. Int J Dyn Control 7(2):776–784
Royston P, Ambler G, Sauerbrei W (1999) The use of fractional polynomials to model continuous risk variables in epidemiology. Int J Epidemiol 28(5):964–974
Goufo EFD, Maritz R, Munganga J (2014) Some properties of the Kermack-McKendrick epidemic model with fractional derivative and nonlinear incidence. Adv Differ Equ 2014(1):1–9
Alla Hamou A, Azroul E, Hammouch Z, Alaoui AL (2021) A Fractional Multi-Order Model to Predict the COVID-19 Outbreak in Morocco. Appl Comput Math 20(1):177–203
Meerschaert MM, Sikorskii A (2011) Stochastic models for fractional calculus, vol 43. Walter de Gruyter
Çenesiz Y, Kurt A, Nane E (2017) Stochastic solutions of conformable fractional Cauchy problems. Stat Probab Lett 124:126–131
Yang Q, Chen D, Zhao T, Chen Y (2016) Fractional calculus in image processing: a review. Fract Calc Appl Anal 19(5):1222–1249
Larnier S, Mecca R (2012) Fractional-order diffusion for image reconstruction, In: 2012 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), IEEE, 1057–1060
Bai J, Feng X-C (2007) Fractional-order anisotropic diffusion for image denoising. IEEE Trans Image Process 16(10):2492–2502
Cruz-Duarte JM, Rosales-Garcia J, Correa-Cely CR, Garcia-Perez A, Avina-Cervantes JG (2018) A closed form expression for the Gaussian-based Caputo-Fabrizio fractional derivative for signal processing applications. Commun Nonlinear Sci Numer Simul 61:138–148
Epstein CL (2007) Introduction to the mathematics of medical imaging. SIAM
Deng W, Li C (2005) Chaos synchronization of the fractional Lü system. Physica A 353:61–72
Hartley TT, Lorenzo CF, Qammer HK (1995) Chaos in a fractional order Chua’s system. IEEE Trans Circ Syst I 42(8):485–490
Li C, Chen G (2004) Chaos in the fractional order Chen system and its control. Chaos Solitons Fract 22(3):549–554
Owolabi KM, Karaagac B (2020) Chaotic and spatiotemporal oscillations in fractional reaction-diffusion system. Chaos Solitons Fract 141:110302. ISSN 0960–0779. https://doi.org/10.1016/j.chaos.2020.110302, https://www.sciencedirect.com/science/article/pii/S0960077920306986
Sweilam NH, El-Sayed AAE, Boulaaras S (2021) Fractional-order advection-dispersion problem solution via the spectral collocation method and the non-standard finite difference technique. Chaos Solitons Fract 144:110736
Kumar S, Pandey P (2020) A Legendre spectral finite difference method for the solution of non-linear space-time fractional Burger’s-Huxley and reaction-diffusion equation with Atangana-Baleanu derivative. Chaos Solitons Fract 130:109402
Hu Y, Li C, Li H (2017) The finite difference method for Caputo-type parabolic equation with fractional Laplacian: one-dimension case. Chaos Solitons Fract 102:319–326
Jin B, Lazarov R, Zhou Z (2013) Error estimates for a semidiscrete finite element method for fractional order parabolic equations. SIAM J Numer Anal 51(1):445–466
Zhao X, Hu X, Cai W, Karniadakis GE (2017) Adaptive finite element method for fractional differential equations using hierarchical matrices. Comput Methods Appl Mech Eng 325:56–76
Deng W (2009) Finite element method for the space and time fractional Fokker-Planck equation. SIAM J Numer Anal 47(1):204–226
Jin B, Lazarov R, Zhou Z (2016) A Petrov-Galerkin finite element method for fractional convection-diffusion equations. SIAM J Numer Anal 54(1):481–503
Zheng Y, Zhao Z (2020) The time discontinuous space-time finite element method for fractional diffusion-wave equation. Appl Numer Math 150:105–116
Deng W (2009) Finite element method for the space and time fractional Fokker-Planck equation. SIAM J Numer Anal 47(1):204–226. https://doi.org/10.1137/080714130
Kumar D, Chaudhary S, Kumar VS (2019) Finite element analysis for coupled time-fractional nonlinear diffusion system. Comput Math Appl 78(6):1919–1936
Gao F, Wang X (2014) A modified weak Galerkin finite element method for a class of parabolic problems. J Comput Appl Math 271:1–19
Zheng Y, Zhao Z (2017) The discontinuous Galerkin finite element method for fractional cable equation. Appl Numer Math 115:32–41. ISSN 0168-9274, https://doi.org/10.1016/j.apnum.2016.12.006, https://www.sciencedirect.com/science/article/pii/S0168927417300053
Jin B, Lazarov R, Zhou Z (2013) Error estimates for a semidiscrete finite element method for fractional order parabolic equations. SIAM J Numer Anal 51(1):445–466. https://doi.org/10.1137/120873984
Xu T, Liu F, Lü S, Anh VV (2020) Finite difference/finite element method for two-dimensional time-space fractional Bloch-Torrey equations with variable coefficients on irregular convex domains. Comput Math Appl 80(12):3173–3192
Liu X, Yang X (2021) Mixed finite element method for the nonlinear time-fractional stochastic fourth-order reaction-diffusion equation. Comput Math Appl 84:39–55
Jia J, Wang H, Zheng X (2021) A preconditioned fast finite element approximation to variable-order time-fractional diffusion equations in multiple space dimensions. Appl Numer Math 163:15–29
Li D, Liao H-L, Sun W, Wang J, Zhang J, Analysis of \(L1\)-Galerkin FEMs for time-fractional nonlinear parabolic problems, arXiv preprint arXiv:1612.00562
Pao C (1993) Positive solutions and dynamics of a finite difference reaction-diffusion system. Num Methods Part Differ Equ 9(3):285–311
Pao C (1996) Blowing-up and asymptotic behaviour of solutions for a finite difference system. Appl Anal 62(1–2):29–38
Bellman R, Juncosa ML, Kalaba R (1961) Some numerical experiments using newton’s method for nonlinear parabolic and elliptic boundary-value problems. Commun ACM 4(4):187–191, ISSN 0001-0782, https://doi.org/10.1145/355578.366508
Parter SV (1964) Mildly nonlinear elliptic partial differential equations and their numerical solution. I, Tech. Rep., Wisconsin Univ Madison Mathematics Research Center R
Greenspan D, Parter SV (1964) Mildly nonlinear elliptic partial differential equations and their numerical solution. Tech. Rep., Wisconsin Univ Madison Mathematics Research Center, II
Walter W (1968) Die Linienmethode bei nichtlinearen parabolischen Differentialgleichungen. Numer Math 12(4):307–321
Pao C (2002) Finite difference reaction-diffusion systems with coupled boundary conditions and time delays. J Math Anal Appl 272(2):407–434
Pao C (2001) Numerical solutions of reaction-diffusion equations with nonlocal boundary conditions. J Comput Appl Math 136(1–2):227–243
Pao C-V (2012) Nonlinear parabolic and elliptic equations. Springer Science & Business Media
Pao C-V (1982) On nonlinear reaction-diffusion systems. J Math Anal Appl 87(1):165–198
Pao C (1985) Monotone iterative methods for finite difference system of reaction-diffusion equations. Numer Math 46(4):571–586
Khalil R, Al Horani M, Yousef A, Sababheh M (2014) A new definition of fractional derivative. J Comput Appl Math 264:65–70. https://doi.org/10.1016/j.cam.2014.01.002
Abdeljawad T (2015) On conformable fractional calculus. J Comput Appl Math 279:57–66. https://doi.org/10.1016/j.cam.2014.10.016
Wang Y, Zhou J, Li Y (2016) Fractional Sobolev’s spaces on time scales via conformable fractional calculus and their application to a fractional differential equation on time scales. Adv Math Phys 2016:1–22. https://doi.org/10.1155/2016/9636491
Benkhettou N, Hassani S, Torres DF (2016) A conformable fractional calculus on arbitrary time scales. J King Saud Univ-Sci 28(1):93–98. https://doi.org/10.1016/j.jksus.2015.05.003
Abdeljawad T (2015) On conformable fractional calculus. J Comput Appl Math 279:57–66
Alla Hamou A, Azroul E, Alaoui A (2020) Monotone iterative technique for nonlinear periodic time fractional parabolic problems. Adv Theory Nonlinear Anal Appl 4(3):194–213
Brezis H, Ciarlet PG, Lions JL (1999) Analyse fonctionnelle: théorie et applications, vol 91. Dunod Paris
Adams RA, Fournier JJ (2003) Sobolev spaces. Elsevier
Alla hamou A, Azroul E, Hammouch Z, Lamrani alaoui A, Modeling and numerical investigation of a Conformable co-infection model for describing Hantavirus of the European moles, math. meth. app. sci. Preprint
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Hamou, A.A., Azroul, E., Hammouch, Z. et al. A monotone iterative technique combined to finite element method for solving reaction-diffusion problems pertaining to non-integer derivative. Engineering with Computers 39, 2515–2541 (2023). https://doi.org/10.1007/s00366-022-01635-4
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00366-022-01635-4
Keywords
- Reaction-diffusion problems
- Non-integer derivative
- Upper and lower solutions
- Monotone iterative technique
- Finite element method