
Abstract
One of the ongoing issues with time fractional diffusion models is the design of efficient high-order numerical schemes for the solutions of limited regularity. We construct in this paper two efficient Galerkin spectral algorithms for solving multi-dimensional time fractional advection–diffusion–reaction equations with constant and variable coefficients. The model solution is discretized in time with a spectral expansion of fractional-order Jacobi orthogonal functions. For the space discretization, the proposed schemes accommodate high-order Jacobi Galerkin spectral discretization. The numerical schemes do not require imposition of artificial smoothness assumptions in time direction as is required for most methods based on polynomial interpolation. We illustrate the flexibility of the algorithms by comparing the standard Jacobi and the fractional Jacobi spectral methods for three numerical examples. The numerical results indicate that the global character of the fractional Jacobi functions makes them well-suited to time fractional diffusion equations because they naturally take the irregular behavior of the solution into account and thus preserve the singularity of the solution.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Many mathematical models for scientific and engineering applications involve fractional-order derivatives. The time fractional partial differential equations are proposed to improve the modeling accuracy in depicting the anomalous diffusion process, successfully capturing power-law frequency dependence [30], adequately modeling various types of viscoelastic damping [13], properly simulating the unsteady flow of a fractional Maxwell fluid [41] and Oldroyd-B fluid [18]. These models rely on fractional-order derivatives to represent the observed sublinear or superlinear growth of the variance of the variable of interest. The former corresponds to subdiffusion and the latter to superdiffusion. Subdiffusion is modeled by a fractional time derivative and characterized by temporally non-local transport (i.e. memory effects). Superdiffusion is modeled by a fractional diffusion term and typically characterized by spatially non-local transport (i.e. large displacements). As such, they can be used to represent memory effects and long-range dispersion processes.
The application of time fractional diffusion models to realistic problems strongly depends on the numerical methods available to solve the model equation. Hendy and Zaky [26] developed an efficient finite difference/Legendre Galerkin method to solve a coupled system of nonlinear multi-term time-space fractional diffusion equations. They obtained optimal error estimates introducing a new generalized discrete form of the fractional Grönwall inequality which enabled them to overcome the difficulties caused by the sum of Caputo time-fractional derivatives and the positivity of the reaction term over the nonuniform time mesh. Gao and Sun [19] constructed a compact difference scheme to solve the fractional sub-diffusion equations using the \(L_{1}\) scheme for the time-fractional derivative and fourth-order accuracy compact approximation for spatial direction. Zhao et al. [52] established two fully-discrete approximate schemes with unconditional stability for the time-fractional diffusion equation based on spatial conforming and nonconforming mixed finite element methods combined with classical \(L_{1}\) time stepping method. For the first time in literature, Zaky et al. [50] proposed semi-implicit spectral approximations for nonlinear Caputo time- and Riesz space-fractional diffusion equations with both smooth and non-smooth solutions. Mustapha and Mclean [36] developed and analysed the discontinuous Galerkin method to solve the fractional diffusion and wave equations, and obtained superconvergence results. Sousa [40] proposed a high order explicit finite difference method for fractional advection diffusion equations. Hendy [24] constructed a fully implicit difference method for the numerical solution of those equations. The scheme was built on the idea of separating the current state and the prehistory function such that the prehistory function was approximated by means of an appropriate interpolation–extrapolation operator. Abbaszadeh and Dehghan [2] developed a numerical scheme based on fast and efficient meshless local Petrov–Galerkin method for solving the fractional fourth-order partial differential equation on computational domains with complex shape. Abbaszadeh and Dehghan [1] proposed meshless upwind local radial basis function-finite difference technique to simulate the time– fractional distributed–order advection–diffusion equation. Li et al. [31] presented two-grid algorithms based on expanded mixed finite element method for solving two-dimensional semilinear time fractional reaction–diffusion equations. Gu and Sun [20] constructed a meshless method for solving three-dimensional time fractional diffusion equation with variable-order derivatives. Jin [28] considered a finite element method to solve time fractional diffusion equation with non-smooth initial data, and established optimal error estimates. Most of the aforementioned methods relied on the finite difference method to discretize the time fractional derivative. Moreover, most of the known methods work well on fractional differential equations with smooth solutions or solutions with relatively good regularities.
Another approach to design an accurate numerical scheme is to discretize these non-local differential operators with global numerical methods [3, 17, 23, 46,47,48]. Hence, the non-local behaviour of the solution can be taken into account and the computational cost is not substantially increased when moving from a first-order to a fractional-order diffusion model [4, 5, 15, 44, 45]. In a series of papers Bhrawy et al. developed spectral tau [7, 8, 43] and collocation methods [9, 12] for solving various types of fractional differential equations. Unlike the classical differential equations, solutions to time-fractional partial differential are generally non-smooth. Up to now, few numerical methods have been proposed for fractional differential equations with non-smooth solutions, such as the use of nonuniform grids (see e.g. [25]), the nonpolynomial/singular basis (see e.g. [10, 11, 49]), and Lubich’s correction method (see e.g. [51]). It was pointed out by Diethelm et al. [14] that the approximation of the function \(f(t)=t^\alpha\) on [0, h] by any linear polynomial is at best \(O(h^\alpha )\). But the order of approximation \(O(h^\alpha )\) of \(t^\alpha\) on [0, h] is also achieved by the constant polynomial 0. That is: using a linear polynomial to approximate \(t^\alpha\) on [0, h] does not give an essentially better result than using a constant polynomial. In a similar way one can show that using polynomials of higher degree does not improve the situation: the order of approximation of \(t^\alpha\) on [0, h] is still only \(O(h^\alpha )\). The purpose of this paper is to extend our approaches in [21, 22] introducing two efficient fractional Galerkin spectral algorithms for solving multi-dimensional time fractional advection–diffusion–reaction equations with constant and variable coefficients with non smooth solutions. The model solution is discretized in time with a spectral expansion of fractional Jacobi functions (FJFs). For the space discretization, the proposed schemes accommodate high-order Jacobi Galerkin spectral discretization. The numerical schemes do not require imposition of artificial smoothness assumptions in time direction because they naturally take the irregular behavior of the solution into account and thus preserve the singularity of the solution.
The rest of the paper is organized as follows. In the next section, we briefly review some basic properties of fractional integrals and derivatives, and recall relevant properties of the Jacobi polynomials. In Sect. 3, the fractional Jacobi functions and their fractional differentiation are presented. In Sect. 4, a time-space discretization for the time fractional advection–diffusion–reaction equations with constant coefficients is constructed. In Sect. 5, we consider the numerical solution of the one-dimensional time fractional advection–diffusion–reaction equations with variable coefficients. In Sect. 6, we consider the numerical solution of the two-dimensional case with constant coefficients. In Sect. 7, the variable coefficients case is considered. In Sect. 8, various numerical tests exhibiting the efficiency of our numerical schemes are presented. We end the paper with some concluding remarks in Sect. 9.
2 Preliminaries
In this section, we recall some basic properties of fractional integrals and derivatives, and briefly review some relevant properties of the Jacobi polynomials. All of these properties can be found in [37, 39].
2.1 Fractional integrals and derivatives
For \(\nu >0\), the fractional integrals of order \(\nu\) is defined by
where \(\Gamma (x)\) is the gamma function. Let n be the positive integer satisfying \(n-1\le \nu <n\), then the Riemann–Liouville and the Caputo fractional derivatives of order \(\nu\) are defined, respectively, as
For any absolutely integrable function u(x), an important property of Riemann–Liouville fractional derivatives is
where this equation holds in the almost everywhere sense.
The following lemma gives the relation between Riemann–Liouville and Caputo fractional derivatives.
Lemma 1
We have
2.2 Jacobi polynomials and their properties
Let \(J_n^{(\alpha ,\beta )}(x)\) denote the Jacobi polynomial of degree n, which is explicitly defined by
where
then we see that \(J_n^{(\alpha ,\beta )}(x)\) are always polynomials in x for \(\alpha ,\ \beta \in \mathbb {R}\). The classical Jacobi polynomials are correspond to the parameters \(\alpha ,\beta >-1\). Let \(\omega ^{(\alpha ,\beta )}(x)=(1-x)^{\alpha }(1+x)^{\beta }\) be the Jacobi weight function and let \(I=(-1,1)\), then we define the inner product and the associated norm by
For notational simplicity, we will drop the subscript \(\omega ^{(\alpha ,\beta )}\) from \((u,v)_{\omega ^{(\alpha ,\beta )}}\) and \(\Vert u \Vert _{\omega ^{(\alpha ,\beta )}}\) when \(\alpha =\beta =0\). Moreover, we denote by \(L_{\omega ^{(\alpha ,\beta )}}^{2}(I)\) the space of functions such that \(\Vert u\Vert _{\omega ^{(\alpha ,\beta )}} < \infty\). It is well known that the Jacobi polynomials are orthogonal with respect to \(\omega ^{(\alpha ,\beta )}(x)\) and
where \(\delta _{n,m}\) is the Kronecker delta and
In practical computations, it is convenient to compute the Jacobi polynomials by using the three-term recurrence relation
where
with the two initial Jacobi polynomials given by
For bounding some approximation error of Jacobi polynomials, we need the following nonuniformly-weighted Sobolev space, namely
equipped with the inner product and the norm
Lemma 2
Let \(u \in H_{{\chi ^{(\alpha ,\beta )}}, * }^m ( - 1,1)\) for some \(m \ge 1\) and \(\phi \in \mathcal {P}_{N}\). Then for the Jacobi-Gauss and Jacobi–Gauss–Radau integration, we have
and for the Jacobi Gauss–Lobatto integration, we have
In practical computations, it is convenient to compute the Jacobi polynomials on the interval \([0,\mathscr {L}]\). Hence, we rescale the interval \([-1,1]\) onto \([0,\mathscr {L}]\) by the linear map \(z=\dfrac{2x}{\mathscr {L}}-1\). The set of Jacobi polynomials \(J^{(\alpha ,\beta )}_{\mathscr {L},i}(x)\) which are defined on \([0,\mathscr {L}]\) are generated by:
where
The endpoint values of the shifted Jacobi polynomials are given as
which will be of important use later. They satisfy the following orthogonality relation
where \(w^{(\alpha ,\beta )}_\mathscr {L}(x)=x^\beta (\mathscr {L}-x)^\alpha\) is the weight function, and
The following lemma will be of essential use in establishing our main results.
Lemma 3
(see [16]) The q times repeated differentiation of\(J_{\mathscr {L},j}^{(\alpha ,\beta )}(x)\) are given explicitly by
where
where \(\lambda = \alpha + \beta + 1\), \((\cdot )_i\) is the Pochhammer symbol, and for the definition of generalized hypergeometric functions and special \(_3 F_2\), see [32].
3 Fractional-order Jacobi functions
In this section, we first introduce some basic properties of fractional-order Jacobi functions [11, 49]. Then, we construct the fractional derivative for the fractional-order Jacobi functions. The fractional-order Jacobi functions are the eigenfunctions of the singular Sturm–Liouville problem
and they are given explicitly by
where
and satisfy the following recurrence relations
where
Let \(\ w^{(\alpha ,\beta ,\lambda )}(t)=\lambda t^{(\beta +1)\lambda -1} (1-t^\lambda )^\alpha \). Thanks to (2.17), then the fractional-order Jacobi functions form a complete \(L^{2}_{w^{(\alpha ,\beta ,\lambda )}}[0,1]\)-orthogonal system, that is,
Remark 1
We note that if \(t_i,\ 1\le i\le N\) are the roots of the shifted Jacobi polynomials \(J_{\mathscr {L},i}^{(\alpha ,\beta )}(t)\), then \(t_i^{\frac{1}{\lambda }},\ 1\le i\le N\) are the roots of the shifted fractional-order Jacobi functions \(J_{i}^{(\alpha ,\beta ,\lambda )}(t)\).
Remark 2
The FJFs comprise an unlimited number of orthogonal functions, including the shifted fractional-order Gegenbauer functions \(C^{\alpha }_{\lambda ,i}(x)\), the shifted fractional-order Chebyshev functions of the first kind \(T_{\lambda ,i}(x)\), the shifted fractional-order Legendre functions \(P_{\lambda ,i}(x)\) [29], the shifted Chebyshev functions of the second kind \(U_{\lambda ,i}(x)\), the shifted fractional-order Chebyshev functions of third and fourth kinds \(V_{\lambda ,i}(x)\) and \(W_{\lambda ,i}(x)\). These orthogonal functions are interrelated with the FJFs by the following relations:
Lemma 4
(see [11]) The fractional derivative of order \(\nu\), \(0< \nu <1\) in the Caputo sense for the shifted fractional Jacobi polynomials is given by
where
Lemma 5
(see, [49]) Let \(\mathcal {F}_N^{(\alpha ,\beta ,\lambda )}\) be the set of fractional-order Jacobi functions of degree N, \(u(x)=v(( {\frac{{1 + x}}{2}})^{\frac{1}{\lambda }}) \in H_{{\chi ^{(\alpha ,\beta )}}, * }^m ( - 1,1)\) for some \(m \ge 1\) and \(\phi (x)=\varphi (( {\frac{{1 + x}}{2}})^{\frac{1}{\lambda }}) \in \mathcal {F}^{(\alpha ,\beta ,\lambda )}_{N}\). Then for the fractional Jacobi-Gauss and the fractional Jacobi-Gauss–Radau integration, we have
and for the fractional Jacobi Gauss–Lobatto integration, we have
4 Fractional Galerkin method for the one-dimensional case
One of the standard techniques for solving linear time-fractional partial differential equations with constant coefficients is the Galerkin method. In this section, we derive a time-space discretization for the following time fractional advection–diffusion–reaction equation with constant coefficients based on the Galerkin method with fractional Jacobi and Jacobi expansions in both time and space, respectively.
with the homogeneous initial-boundary conditions
where \(\Lambda =(0,\mathscr {L})\) denotes a bounded domain with its boundary \(\partial \Lambda\), and \(I=(0,1]\) is the time interval. We plug in an ansatz for the solution into (4.1)–(4.2) and require the residual of the projection onto the space spanned by the test functions to vanish.
Let \(\mathcal {F}_M^{(\alpha ,\beta ,\lambda )}(I)\) be the space of fractional functions in time and \(P_N (\Lambda )\) be the set of polynomials of degree N in space, and since we consider \(u(x,0) \equiv 0\) as well as \(u(\partial \Lambda ,t) \equiv 0\), then we choose appropriate basis for the time ansatz from
as well as for space
For the sake of convenience, we define
where the multiindex \(L=(N,M)\). Finally, we introduce the following notation for the integrals involved in the Jacobi–Galerkin spectral formulation of the model equations.
The discrete solution is expressed in terms of a matrix of unknown coefficients \(\mathcal {U}_{ij}\) as follows:
where \(\phi^{(\alpha ,\beta )}_{\mathscr {L},i}(x) \in P_N^s (\Lambda )\) and \(\psi^{(\alpha ,\beta ,\lambda )}_{j}(t) \in P_M^t (I)\). Then the Galerkin problem is given by finding \(\hat{u} \in W_L\) such that
The linear system obtained from (4.8) depends on the choice of the basis functions \(\phi^{(\alpha ,\beta )}_{\mathscr {L},i}(x)\) and \(\psi^{(\alpha ,\beta ,\lambda )}_{j}(t)\) of \(W_L\). By carefully selecting an appropriate basis for both space and time, we can make sure that the resulting system is sparse, that allowing us to invert it easily. Therefore, we look for basis functions as a linear combination of the shifted Jacobi functions and FJFs, namely,
where the parameters \(\left\{ \epsilon _i,\ \varepsilon _i \right\}\) and \(\left\{ \rho _j \right\}\) are chosen to satisfy the homogeneous initial and Dirichlet boundary conditions. Even though this choice of modal basis functions might seem arbitrary, it can be verified that these polynomials constitute a suitable basis that allows easy evaluation of the involved derivatives in combination with (2.19) and (3.12).
Lemma 6
For all \(i\ge 0\), there exists a unique set of \(\left\{ \epsilon _i,\ \varepsilon _i,\ \rho _i \right\}\) such that
verify the boundary conditions in (4.2).
Proof
Since \(\phi^{(\alpha ,\beta )}_{\mathscr {L},i}(0)= \phi^{(\alpha ,\beta )}_{\mathscr {L},i}(\mathscr {L})=0\) and from (2.16), we have the following system
Hence \(\epsilon _i\) and \(\varepsilon _i\) can be uniquely determined to give
Also, since \(\psi^{(\alpha ,\beta ,\lambda )}_{j}(0)=0\) and from (3.4), we have that
Hence \(\rho _j\) can be uniquely determined to give
\(\square\)
It is obvious that the two sets of basis functions \(\phi^{(\alpha ,\beta )}_{\mathscr {L},i}(x) \in P_{N+2}^s (\Lambda )\) and \(\psi^{(\alpha ,\beta ,\lambda )}_{j}(t) \in P_{M+1}^t (I)\) are linearly independent. Therefore, by dimension argument, we have
It is clear that the Galerkin formulation of (4.8) is equivalent to the following discretization
for \(0\le i\le N-2\) and \(0\le j\le M-1\). To simplify the presentation, we shall always assume that the indices i and r vary between 0 and \(N-2\) and that the indices j and s vary between 0 and \(M-1\). Further, we assume that a repeated index is summed over. The above discretization can be expressed in the matrix form:
which can be written compactly in the form
where
\(\mathcal {U}=\left( \mathcal {U}_{ij} \right) _{0\leqslant i\leqslant N-2,\ 0\leqslant j\leqslant M-1}\) is the matrix of unknown coefficients, and reaction matrix. To solve (4.19), we recast it in a more convenient form using the Kronecker product (represented by \(\otimes\)).
If we consider the matrices \(\mathbf {F} \in \mathbb {R}^{n,m}\) and \(\mathbf {G} \in \mathbb {R}^{q,p}\), then the Kronecker product of \(\mathcal {F}\) and \(\mathcal {G}\) is defined as the matrix
Let \(f_i \in \mathbb {R}^{n}\) denote the columns of \(\mathcal {F}\in \mathbb {R}^{n,m}\) so that \(\mathcal {F}= \left[ f_1, \ldots , f_m \right]\). Then \(\text {vec}(\mathcal {F})\) is defined to be the nm-vector formed by stacking the columns of \(\mathcal {F}\) on top of one another, i.e.,
The Kronecker product and the \(\text {vec}\) operator have the following useful property which will be used in the following discussions. For any three matrices \(\mathcal {F}\), \(\mathcal {G}\) and \(\mathbf{H}\) we define the matrix product \(\mathcal {F} \mathcal {G} \mathbf{H}\) to be
where \({}^T\) denotes the transpose.
Accordingly the set of discrete equations (4.19) may be put in the following matrix form:
Theorem 1
The nonzero elements \(\mathcal {A}_{ir},\ \mathcal {B}_{ir},\ \mathcal {C}_{ir},\ \mathcal {D}^{\nu }_{js}\) and \(\mathcal {E}_{js}\) are given by
where
and \(h^{(\alpha ,\beta )}_{\mathscr {L},i}\) is given by (2.18).
Proof
From (4.10), we have
Using the orthogonality relation (2.17), we obtain
\(\square\)
Note. It is worthy to be noted here that the nonzero entries of the other matrices \(\mathcal {B},\ \mathcal {C},\ \mathcal {D}^{\nu }\) and \(\mathcal {E}\) can be obtained similarly.
5 Fractional Galerkin method with numerical integration for the one-dimensional case
The pure fractional-order Jacobi–Galerkin method presented in the previous section lead to efficient spectral algorithms for linear time-fractional partial differential equation with constant coefficients. However, it is not feasible for problems with variable coefficients for which the integration is often not possible. Therefore, for the linear time-fractional partial differential equations with variable coefficients, we have to resort to numerical integration [6]. In this way, we obtain the modified scheme (5.3), which we term the fractional Galerkin with numerical integration scheme.
In this section, we consider the numerical solution of the following one-dimensional time-fractional partial differential equations with variable coefficients:
with homogeneous initial and Dirichlet boundary conditions. The fractional-order Jacobi–Galerkin method for (5.1) is to find \(\hat{u} \in W_L\) such that
with \(\left\langle {\left\langle \cdot \right\rangle } \right\rangle _{N,M}\) being the discrete inner product relative to the Jacobi–Gauss quadrature and fractional Jacobi–Gauss quadrature in both space and time, respectively. Equation (5.2) implies
where \(\left\langle \cdot \right\rangle _{t,M}\), \(\left\langle \cdot \right\rangle _{x,N}\) and \(\left\langle {\left\langle \cdot \right\rangle } \right\rangle _{N,M}\) are the discrete approximations of the integrals in (4.6) with the fractional Jacobi–Gauss quadrature in time, Jacobi–Gauss quadrature in space and both of them in both space and time, respectively.
Let us denote
where
then, the linear system (5.3) becomes
6 Fractional Galerkin method for the two-dimensional case
The two-dimensional fractional Galerkin method is significantly more complex than the one-dimensional version. In this section, we consider the numerical solution of the two-dimensional time fractional advection–diffusion–reaction equations in the form:
with homogeneous initial and Dirichlet boundary conditions, where \(\Lambda ^2=\Lambda \times \Lambda\). The two-dimensional Galerkin approximation may be written as
Then the fractional-order Jacobi–Galerkin scheme (4.18) in the two-dimensional case is equivalent to
Let us denote
and
where \(\widehat{ \mathcal {U}}\) is the matrix of unknown coefficients and \(\widehat{ \mathcal {F}}\) is the reaction matrix whose entries are \(\mathcal {F}_{ii'j}=\left\langle { \left\langle {\left\langle \phi^{(\alpha ,\beta )}_{\mathscr {L},i}(x) \phi^{(\alpha ,\beta )}_{\mathscr {L},i'}(y) f(x,y,t) \psi^{(\alpha ,\beta ,\lambda )}_{j}(t) \right\rangle } \right\rangle } \right\rangle\). The fractional-order Jacobi-Galerkin discretization (6.3) is equivalent to the following matrix equation
To solve (6.6), we recast it in a more convenient form using the Kronecker product. We can express the set of discrete equations (6.6) in the following matrix form
This linear system can be solved by using a suitable iterative method to obtain the numerical solution (6.2). In our implementation, this system has been solved using the Mathematica function FindRoot with zero initial approximation.
7 Fractional Galerkin method with numerical integration for the two-dimensional case
Without any lose of generality, we consider the two-dimensional time-fractional partial differential equation with variable coefficients supplemented by homogeneous initial and boundary conditions, namely
with the initial condition
and the homogeneous Dirichlet boundary condition
We can always modify the right-hand side to take care of the nonhomogeneous initial and boundary conditions. We will utilize (6.2) to establish the fractional-order Jacobi-Galerkin method with numerical integration for (7.1). Hence the fractional-order Jacobi–Galerkin scheme (5.3) in the two-dimensional case is equivalent to
Let us denote
and
where
Then using the same notation introduced in (5.5) and (4.20), the fractional-order Jacobi–Galerkin discretization (7.4) is equivalent to the following matrix equation
To solve (6.6), we recast it in a more convenient form using the Kronecker product. We can express the set of discrete equations (6.6) in the following matrix form
This system has the same method of solution like that of (6.2). We now describe how problems with nonhomogeneous initial-boundary conditions can be efficiently transformed into problems with homogeneous initial-boundary conditions. We proceed as follows: Setting
where \(\tilde{u}\) is an auxiliary unknown function satisfying the modified problem
subject to the homogeneous initial-boundary conditions
where
while \(u_e(x,t)\) is an arbitrary function satisfying the original nonhomogeneous boundary conditions.
8 Numerical results and comparisons
In this section, three numerical examples are outlined to demonstrate the pertinence and proficiency of the novel technique. The calculations are executed by utilizing Mathematica of Version 9, and all counts are completed in a PC of CPU Intel(R) Core(TM) i3-2350M 2 Duo CPU 2.30 GHz, 6.00 GB of RAM.
The distinction between the measured value of approximate solution and its actual value (absolute error), is given by
where u(x, t) and \(\hat{u}(x,t)\) are the exact solution and the numerical solution at the point (x, t), respectively. Moreover, the maximum absolute error (MAE) is given by
and
also we can denote to the root mean square (RMS) error by
Example 1
We consider the one-dimensional fractional-order advection diffusion equation with constant coefficients [33]:
with the initial condition:
and the boundary conditions:
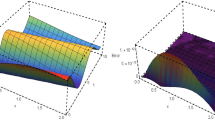
The exact solution of the above problem is \(u(x,t)=t^{\gamma } \cos (x)\). The source function is given by \(f(x,t)=\frac{\Gamma (\gamma +1)}{\Gamma (\gamma -\nu +1)}t^{\gamma -\nu } \cos (x)+t^{\gamma }(10\cos (x)-4\sin (x))\). In Tables 1 and 2, we present the \(L_{\infty },\ L_{2}\) errors and the RMS of errors when \(t=0.2,\ 0.4,\ 0.6,\ 0.8,\ 1,\) \(\alpha =\beta =0\) and \(N=M=16\) for two different values of \(\nu +3=\gamma =3.2\) and \(\nu +3=\gamma =3.6\), respectively. For \(\nu +3=\gamma =3.6\), \(\lambda =0.6,\ \alpha =\beta =\frac{1}{2}\) and \(N=M=16\) the space-time graphs of the approximate solution and its absolute error function are illustrated in Fig. 1. The numerical results show high accuracy of the fractional Jacobi Galerkin method for the sufficiently smooth solution. For the non-smooth case, where \(\nu =\gamma =\lambda =\frac{1}{2}\), the \(L_{\infty }\)- errors are considered in Table 3. This results show also that the method is flexible for the non-smooth solutions.

The space-time graphs of the approximate solution (left) and its absolute error function (right) for Example 1 with \(\nu =\lambda =0.6,\ \alpha =\beta =\frac{1}{2},\) \(\gamma =3.6\) and \(N=M=16\)
Example 2
Consider the one-dimensional fractional diffusion equation [27, 34, 35, 38]:
with the initial condition:
and the boundary conditions:
When \(\nu =1\), the exact solution of this problem is
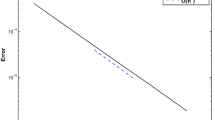
Taking \(\nu =\lambda =0.75,\ \nu =\lambda =0.9,\) \(N=M=4\) and \(\alpha =\beta =-\frac{1}{2}\), in Tables 4 and 5, we compare our results with those obtained by using the Adomian decomposition method (ADM) [35], variational iteration method (VIM) [34], Sinc-Legendre collocation method (S-LCM) [38], Gegenbauer spectral method (GSM) [27], and fractional-order Jacobi Tau method (F-OJTM) [11]. It should be noted that only the fourth-order term of the ADM was used in evaluating the approximate solutions for Tables 4 and 5. In Table 6, it clearly appears that our method is more accurate than VIM, S-LCM, and GSM, and the obtained results are in good agreement with the exact solution. Moreover, in Fig. 2, the convergence rate of the fractional Galerkin method presented is displayed based on MAEs for different values of M and N.

The \(L^\infty\)- errors for Example 2 versus \(N=M\) with \(\alpha =-\beta =\frac{1}{2}\) and \(\nu =\lambda =1\)
Example 3
We consider the exact solution \(u(x,y,t)=\cos (x)\cos (y)t^{\nu +2}\) for the two-dimensional time fractional advection–diffusion–reaction equation (6.1)-(7.1) on the domain, \(0<x\le \pi ,\ 0<y\le \pi ,\ 0<t\le 1\). The initial and boundary conditions can be extracted using the exact solution.
Constant coefficients problem:
where the source term
This problem has been studied in [42]. In [42], the problem has been discretized by a fourth-order compact finite difference approximation in the spatial directions and by an alternating direction implicit (ADI) approximation in the temporal direction. In Table 7, we compare the MAEs using our scheme at \(\alpha =\beta =\frac{1}{2}\) and those achieved using the Compact ADI method [42] for various choices of \(\nu\). The space graph of absolute errors at \(\alpha =\beta =0\) and \(\nu =\lambda =0.9\) for different values of t with \(N = M=10\) of the approximate solution is displayed in Fig. 3.

The space-time graph of the absolute errors at various choices of t with \(\nu =\lambda =0.9,\ N=M=10\) and \(\alpha =\beta =0\) for the constant coefficients problem in Example 3
Variable coefficients problem:
where the source term
In Table 8, we present MAEs obtained by our method, with \(\alpha =\beta =0\) and \(\nu =0.25\) at different values of t and \(N=M\). The numerical results presented in this table show that the results are very accurate for small values of \(N=M\). Figure 4 demonstrates that the absolute errors of \(\hat{u}(x,y,t_i)\) are very small for even the small number of grid points taken.

The space-time graphs of the absolute error functions at various choices of t with \(\nu =\lambda =-0.5,\ N=M=10\) and \(\alpha =\beta =-\frac{1}{2}\) for the variable coefficients problem of Example 3
9 Concluding remarks
In this paper, we have introduced a non-polynomial spectral Galerkin schemes for certain class of time fractional partial differential equations. We have constructed two efficient Galerkin spectral algorithms for solving multi-dimensional time fractional advection–diffusion–reaction equations with constant and variable coefficients. The model solution has discretized in time with a spectral expansion of fractional Jacobi functions. For the space discretization, the proposed schemes have accommodated high-order Jacobi Galerkin spectral discretization. We have illustrated the flexibility of the algorithms by comparing the fractional Jacobi Galerkin schemes with the methods proposed in [27, 34, 35, 38] for three numerical examples. The numerical results have indicated that the global character of the FJFs makes them well-suited to time fractional diffusion equations because they naturally take the irregular behavior of the solution into account and thus preserve the singularity of the solution.
Change history
27 February 2021
A Correction to this paper has been published: https://doi.org/10.1007/s00366-021-01365-z
References
Abbaszadeh M, Dehghan M (2019) Meshless upwind local radial basis function-finite difference technique to simulate the time-fractional distributed-order advection–diffusion equation. Eng Comput. https://doi.org/10.1007/s00366-019-00861-7
Abbaszadeh M, Dehghan M (2020) Direct meshless local Petrov-Galerkin (DMLPG) method for time-fractional fourth-order reaction-diffusion problem on complex domains. Comput Math Appl 79(3):876–888
Abdelkawy M, Babatin MM, Lopes AM (2020) Highly accurate technique for solving distributed-order time-fractional-sub-diffusion equations of fourth order. Comput Appl Math 39(2):1–22
Abdelkawy M, Lopes AM, Babatin MM (2020) Shifted fractional Jacobi collocation method for solving fractional functional differential equations of variable order. Chaos Solitons Fractals 134(109):721
Abdelkawy M, Lopes AM, Zaky M (2019) Shifted fractional Jacobi spectral algorithm for solving distributed order time-fractional reaction-diffusion equations. Comput Appl Math 38(2):81
Abo-Gabal H, Zaky MA, Hafez RM, Doha EH (2020) On Romanovski-Jacobi polynomials and their related approximation results. Numer Methods Partial Differential Eq 36:1982–2017
Bhrawy AH, Doha EH, Baleanu D, Ezz-Eldien SS (2015) A spectral tau algorithm based on jacobi operational matrix for numerical solution of time fractional diffusion-wave equations. J Comput Phys 293:142–156
Bhrawy AH, Zaky MA (2015) A method based on the Jacobi tau approximation for solving multi-term time-space fractional partial differential equations. J Comput Phys 281:876–895
Bhrawy AH, Zaky MA (2015) Numerical simulation for two-dimensional variable-order fractional nonlinear cable equation. Nonlinear Dyn 80(1–2):101–116
Bhrawy AH, Zaky MA (2016) A fractional-order Jacobi Tau method for a class of time-fractional PDEs with variable coefficients. Math Methods Appl Sci 39(7):1765–1779
Bhrawy AH, Zaky MA (2016) Shifted fractional-order Jacobi orthogonal functions: application to a system of fractional differential equations. Appl Math Model 40(2):832–845
Bhrawy AH, Zaky MA (2017) An improved collocation method for multi-dimensional space-time variable-order fractional Schrödinger equations. Appl Numer Math 111:197–218
Chen J, Liu F, Anh V, Shen S, Liu Q, Liao C (2012) The analytical solution and numerical solution of the fractional diffusion-wave equation with damping. Appl Math Comput 219(4):1737–1748
Diethelm K, Garrappa R, Stynes M (2020) Good (and not so good) practices in computational methods for fractional calculus. Mathematics 8(3):324
Doha E, Abdelkawy M, Amin A, Baleanu D (2018) Spectral technique for solving variable-order fractional Volterra integro-differential equations. Numer Methods Partial Differ Equ 34(5):1659–1677
Doha EH (2004) On the construction of recurrence relations for the expansion and connection coefficients in series of Jacobi polynomials. J Phys A Math Gen 37(3):657
Ezz-Eldien S, Wang Y, Abdelkawy M, Zaky M, Aldraiweesh A, Machado JT (2020) Chebyshev spectral methods for multi-order fractional neutral pantograph equations. Nonlinear Dyn 100:3785–3797
Feng L, Liu F, Turner I, Zhuang P (2017) Numerical methods and analysis for simulating the flow of a generalized Oldroyd-B fluid between two infinite parallel rigid plates. Int J Heat Mass Transf 115:1309–1320
Gao Gh, Zz Sun (2011) A compact finite difference scheme for the fractional sub-diffusion equations. J Comput Phys 230(3):586–595
Gu Y, Sun H (2020) A meshless method for solving three-dimensional time fractional diffusion equation with variable-order derivatives. Appl Math Model 78:539–549
Hafez RM, Zaky MA (2020) High-order continuous Galerkin methods for multi-dimensional advection–reaction–diffusion problems. Eng Comput 36:1813–1829
Hafez RM, Zaky MA, Abdelkawy MA (2020) Jacobi spectral Galerkin method for distributed-order fractional rayleigh-stokes problem for a generalized second grade fluid. Front Phys 7:240
Hammad M, Hafez RM, Youssri YH, Doha EH (2020) Exponential jacobi-galerkin method and its applications to multidimensional problems in unbounded domains. Appl Numer Math 157(1):88–109
Hendy AS (2020) Numerical treatment for after-effected multi-term time-space fractional advection–diffusion equations. Eng Comput. https://doi.org/10.1007/s00366-020-00975-3
Hendy AS, Zaky MA (2020) Global consistency analysis of L1-Galerkin spectral schemes for coupled nonlinear space-time fractional Schrödinger equations. Appl Numer Math 156:276–302
Hendy AS, Zaky MA (2020) Graded mesh discretization for coupled system of nonlinear multi-term time-space fractional diffusion equations. Eng Comput. https://doi.org/10.1007/s00366-020-01095-8
Izadkhah MM, Saberi-Nadjafi J (2015) Gegenbauer spectral method for time-fractional convection-diffusion equations with variable coefficients. Math Methods Appl Sci 38(15):3183–3194
Jin B, Lazarov R, Zhou Z (2013) Error estimates for a semidiscrete finite element method for fractional order parabolic equations. SIAM J Numer Anal 51(1):445–466
Kazem S, Abbasbandy S, Kumar S (2013) Fractional-order Legendre functions for solving fractional-order differential equations. Appl Math Model 37:5498–5510
Kelly JF, McGough RJ, Meerschaert MM (2008) Analytical time-domain Green’s functions for power-law media. J Acoust Soci Am 124(5):2861–2872
Li Q, Chen Y, Huang Y, Wang Y (2020) Two-grid methods for semilinear time fractional reaction diffusion equations by expanded mixed finite element method. Appl Numer Math 157:38–54
Luke YL (1969) Special functions and their approximations, vol 2. Academic press, New York
Mardani A, Hooshmandasl MR, Heydari M, Cattani C (2018) A meshless method for solving the time fractional advection-diffusion equation with variable coefficients. Comput Math Appl 75(1):122–133
Molliq Y, Noorani MSM, Hashim I (2009) Variational iteration method for fractional heat-and wave-like equations. Nonlinear Anal Real World Appl 10(3):1854–1869
Momani S (2005) Analytical approximate solution for fractional heat-like and wave-like equations with variable coefficients using the decomposition method. Appl Math Comput 165(2):459–472
Mustapha K, McLean W (2013) Superconvergence of a discontinuous Galerkin method for fractional diffusion and wave equations. SIAM J Numer Anal 51(1):491–515
Podlubny I (1999) Fractional differential equations. Academic Press, New York
Saadatmandi A, Dehghan M, Azizi MR (2012) The Sinc-Legendre collocation method for a class of fractional convection-diffusion equations with variable coefficients. Commun Nonlinear Sci Numer Simul 17(11):4125–4136
Shen J, Tang T, Wang LL (2011) Spectral methods: algorithms, analysis and applications, vol 41. Springer, Berlin
Sousa E (2014) An explicit high order method for fractional advection diffusion equations. J Comput Phys 278:257–274
Vieru D, Fetecau C, Fetecau C (2008) Flow of a viscoelastic fluid with the fractional Maxwell model between two side walls perpendicular to a plate. Appl Math Comput 200(1):459–464
Wang YM, Wang T (2016) Error analysis of a high-order compact ADI method for two-dimensional fractional convection-subdiffusion equations. Calcolo 53(3):301–330
Zaky MA (2018) An improved tau method for the multi-dimensional fractional Rayleigh-Stokes problem for a heated generalized second grade fluid. Compu Math Appl 75(7):2243–2258
Zaky MA (2019) Existence, uniqueness and numerical analysis of solutions of tempered fractional boundary value problems. Appl Numer Math 145:429–457
Zaky MA (2019) Recovery of high order accuracy in Jacobi spectral collocation methods for fractional terminal value problems with non-smooth solutions. J Comput Appl Math 357:103–122
Zaky MA (2020) An accurate spectral collocation method for nonlinear systems of fractional differential equations and related integral equations with nonsmooth solutions. Appl Numer Math 154:205–222
Zaky MA, Ameen IG (2020) A priori error estimates of a Jacobi spectral method for nonlinear systems of fractional boundary value problems and related Volterra-Fredholm integral equations with smooth solutions. Numer Algorithms 84:63–89
Zaky MA, Hendy AS (2020) Convergence analysis of an L1-continuous Galerkin method for nonlinear time-space fractional Schrödinger equations. Int J Comput Math. https://doi.org/10.1080/00207160.2020.1822994
Zaky MA, Doha EH, Machado JAT (2018) A spectral framework for fractional variational problems based on fractional Jacobi functions. Appl Numer Math 132:51–72
Zaky MA, Hendy AS, Macías-Díaz JE (2020) Semi-implicit Galerkin-Legendre spectral schemes for nonlinear time-space fractional diffusion-reaction equations with smooth and nonsmooth solutions. J Sci Comput 82(1):1–27
Zeng F, Li C, Liu F, Turner I (2015) Numerical algorithms for time-fractional subdiffusion equation with second-order accuracy. SIAM J Sci Comput 37(1):A55–A78
Zhao Y, Chen P, Bu W, Liu X, Tang Y (2017) Two mixed finite element methods for time-fractional diffusion equations. J Sci Comput 70(1):407–428
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Hafez, R.M., Hammad, M. & Doha, E.H. Fractional Jacobi Galerkin spectral schemes for multi-dimensional time fractional advection–diffusion–reaction equations. Engineering with Computers 38 (Suppl 1), 841–858 (2022). https://doi.org/10.1007/s00366-020-01180-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00366-020-01180-y